JP5143742B2 - ボートの特に船体を洗浄するための自動洗浄用の船舶用設備 - Google Patents
ボートの特に船体を洗浄するための自動洗浄用の船舶用設備 Download PDFInfo
- Publication number
- JP5143742B2 JP5143742B2 JP2008541670A JP2008541670A JP5143742B2 JP 5143742 B2 JP5143742 B2 JP 5143742B2 JP 2008541670 A JP2008541670 A JP 2008541670A JP 2008541670 A JP2008541670 A JP 2008541670A JP 5143742 B2 JP5143742 B2 JP 5143742B2
- Authority
- JP
- Japan
- Prior art keywords
- boat
- cleaning
- rollers
- hull
- equipment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B59/00—Hull protection specially adapted for vessels; Cleaning devices specially adapted for vessels
- B63B59/06—Cleaning devices for hulls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B59/00—Hull protection specially adapted for vessels; Cleaning devices specially adapted for vessels
- B63B59/06—Cleaning devices for hulls
- B63B59/08—Cleaning devices for hulls of underwater surfaces while afloat
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Cleaning In General (AREA)
- Cleaning By Liquid Or Steam (AREA)
Description
−ボートを水から完全に持ち上げる、これは中型−大型ボートにとってきわめて複雑な(また危険な)作業であり、特定のサイズの港にだけある特別なクレーンが必要である、
−様々な人々を必要とする、
−船体に付着した植物層および貝類を除去するための特別な器具を使用する(船体処理は、水中の船体全体の研磨を含み、それによって大気内に有害な粉塵をもたらす)、
−環境をきわめて損なう抗植物塗料によって、船体を塗装する、
−ボートを水に戻す。
−船体上で特別な仕事を実施するためにボートを持ち上げるための手段300(図9−10を参照)、
−オペレータのガングウェイとして有効な更なる縦方向の固定ビームおよび、更なる支持洗浄手段(例えばボートの内部を洗浄するための強力なサクションクリーナ、高圧水噴射機械、空気圧縮機)、
−ローラーを置換するための自動システム(交換に有効な機械式アームを備えたサイドローラーローダ)、
−洗浄のより自動化された管理のための統合型ソフトウェアを備えた制御ユニット内の強力な電子回路、
−ドック内のボートの精密位置決めのためのセンサ、
−ベルトによるおよび/または空気圧システムおよび/または水力システムによる動きの伝動、したがって歯車の数の減少。
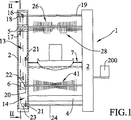
2 中空軸受柱
3 固定縦ビーム
4 固定横ビーム
5 中空ビーム
6 中空ビーム
7 阻止手段
8 ボート
9 水
10 ロッド
11 プレート
12 船体
13 鎖伝動装置
14 鎖伝動装置
15 鎖
16 大歯車
17 キャリッジ
18 モータ
19 横上部軸
20 鎖
21 大歯車
22 キャリッジ
23 モータ
24 横下部軸
25 鎖伝動装置
26 ローラー
27 鎖伝動装置
28 ローラー
29 フィン
30 ヨット
31 鎖
32 大歯車
33 キャリッジ
34 モータ
35 モータ
36 鎖
37 大歯車
38 キャリッジ
39 モータ
40 鎖伝動装置
41 ローラー
42 鎖
43 大歯車
44 キャリッジ
45 モータ
46 モータ
47 ブラシ
48 回転軸
49 洗浄部材
50 回転軸
51 ブラシ
52 回転軸
100 えい航手段
101 モータプーリ
102 フレーム
103 ヒッチ
104 連結棒
105 持ち上げ手段
110 ケーブル
200 コマンドユニット
300 ボート持ち上げ手段
400 水中案内レール
401 ホイール
Claims (14)
- ボートの自動洗浄のための船舶用設備であって、
部分的に水中に入れられた支持構造体(1)と、前記ボートを洗浄するための手段(26、28、41)と、
前記ボート(8、30)に関して前記洗浄手段(26、28、41)の少なくとも一部によって制御される動きを伝達するための手段(13−14、25−26、40)と、
オペレータが前記船舶用設備を制御するためのコマンドユニット(200)とを備え、
前記船舶用設備は、水中ガイド(400)に沿って、前記ボートの長手方向に、水平に移動可能であり、
部分的に水中に入れられる前記支持構造体(1)が、支持中空柱(2)および縦ビーム(3)および横ビーム(4)を備え、
前記支持中空柱(2)にヒンジ結合され、水平方向に拡張収縮可能な4つの可動性ロッド(10)を有し、水平方向から前記ボート(8、30)の移動を阻止する阻止手段(7)を備え、
前記洗浄手段が、前記ボート(8、30)の船体(12)を洗浄するために、前記ボート(8、30)の上方および下方に配置された、少なくとも2つのローラー(26、28、41)を備えることを特徴とする設備。 - モータプーリ(101)、ケーブル(110)およびヒッチ(103)により構成されるボートえい航手段(100−103、110)を備える、ことを特徴とする請求項1に記載の設備。
- 前記動きを伝達するための手段(13−14、25−26、40)が、前記少なくとも2つのローラー(26、28、41)の平行移動動作および回転動作を可能にする、ことを特徴とする請求項1または2に記載の設備。
- 前記洗浄手段(26、28、41)の少なくとも一部を支持するのに適した少なくとも一対の中空可動性ビーム(5−6)を備える、ことを特徴とする請求項1から3までのいずれかに記載の設備。
- 前記少なくとも2つのローラー(26、41)が、回転軸(48、52)で支えられるブラシ(47、51)を備える、ことを特徴とする請求項1から4までのいずれかに記載の設備。
- 前記洗浄手段が、一方がもう一方の前で、軸(50)で支えられる、少なくとも一対のローラー(28)を備え、
前記軸(50)が、伸長収縮されることができ、
前記軸(50)が、特定の方向に向けられることができる、ことを特徴とする請求項1から5までのいずれかに記載の設備。 - 前記少なくとも2つのローラー(26、28、41)が、形状が変えられることができ、したがって、前記ボート(8、30)の前記船体(12)の形状に適応することが可能である、ことを特徴とする請求項1から6までのいずれかに記載の設備。
- 前記動きを伝達するための手段が、モータ(18、23、34、39)によって動かされる大歯車(16、21、32、37、43)の間で引張られる鎖(15、20、31、36、42)から構成される少なくとも1つの鎖伝動装置(13−14、25、27、40)を備え、および/または、
前記動きを伝達するための手段が、少なくとも1つのベルト伝動装置を備え、かつ/または、
前記動きを伝達するための手段が、空気式および/または水力制御装置を備える、ことを特徴とする請求項1から7までのいずれかに記載の設備。 - 前記水から前記ボート(8、30)を持ち上げるための持ち上げ手段(300、104、105)を備える、ことを特徴とする請求項1から8までのいずれかに記載の設備。
- 前記ガイドが、プラットホーム上に配置される水の外側のガイドである、ことを特徴とする請求項1から9までのいずれかに記載の設備。
- 前記洗浄手段(26、28、41)が、前記コマンドユニット(200)によって自動化される、ことを特徴とする請求項1から10までのいずれかに記載の設備。
- 前記コマンドユニット(200)によって自動化される可動性ビーム(5−6)を備える、ことを特徴とする請求項1から11までのいずれかに記載の設備。
- 前記支持構造体(1)が、海底に静止する、ことを特徴とする請求項1から12までのいずれかに記載の設備。
- 前記支持構造体(1)が、海底につなぎ留められて浮く、ことを特徴とする請求項1から13までのいずれかに記載の設備。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT002279A ITMI20052279A1 (it) | 2005-11-29 | 2005-11-29 | Impianto marino per il lavaggio automatico di imbarcazioni in particolare per la pulitura della chiglia |
| ITMI2005A002279 | 2005-11-29 | ||
| PCT/EP2006/066696 WO2007062886A1 (en) | 2005-11-29 | 2006-09-25 | “marine plant for the automatic washing of boats, in particular for cleaning the hull” |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009517260A JP2009517260A (ja) | 2009-04-30 |
| JP5143742B2 true JP5143742B2 (ja) | 2013-02-13 |
Family
ID=37533303
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008541670A Expired - Fee Related JP5143742B2 (ja) | 2005-11-29 | 2006-09-25 | ボートの特に船体を洗浄するための自動洗浄用の船舶用設備 |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US20080282956A1 (ja) |
| EP (1) | EP1981755B1 (ja) |
| JP (1) | JP5143742B2 (ja) |
| CN (1) | CN101341066B (ja) |
| AT (1) | ATE515428T1 (ja) |
| DK (1) | DK1981755T3 (ja) |
| ES (1) | ES2369988T3 (ja) |
| IT (1) | ITMI20052279A1 (ja) |
| PL (1) | PL1981755T3 (ja) |
| RU (1) | RU2008126247A (ja) |
| SI (1) | SI1981755T1 (ja) |
| WO (1) | WO2007062886A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8390641B2 (en) | 2009-02-23 | 2013-03-05 | Fujitsu Limited | Device and method for multicolor vector image processing |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2506088B (en) * | 2011-07-01 | 2017-07-12 | Iev Group Sdn Bhd | Self-cleaning apparatus for the prevention of marine growth |
| JP5525577B2 (ja) * | 2012-08-28 | 2014-06-18 | 株式会社キュー・アイ | 水中清掃装置及び位置センサ装置 |
| AT513609B1 (de) * | 2013-01-31 | 2014-06-15 | Plasser Bahnbaumasch Franz | Reinigungsmaschine zur Reinigung von Schotter eines Gleises |
| US9284027B1 (en) * | 2013-09-18 | 2016-03-15 | Gerhard G. Kalke | Boat wash/rinse system |
| ITCZ20130019A1 (it) | 2013-10-09 | 2015-04-10 | Impianti E Servizi Portuali Morace Srl | Sistema automatico di carenaggio di imbarcazioni e relativo procedimento |
| CN106184650B (zh) * | 2016-08-16 | 2018-01-30 | 江苏科技大学 | 一种柔性贴合清扫表面的曲柄连杆清扫装置 |
| CN106444808B (zh) * | 2016-09-30 | 2019-04-16 | 张瑭 | 一种船体遍历方法及船体遍历机器人 |
| US9745032B1 (en) * | 2016-10-11 | 2017-08-29 | Marc Thurmond | In-water boat-washing system |
| IT201700036975A1 (it) * | 2017-04-04 | 2018-10-04 | Guido Bardelli | Impianto galleggiante e manovrabile di lavaggio e pulizia carene di navi |
| US10562600B2 (en) * | 2017-08-04 | 2020-02-18 | Justo Garcia Diaz | Machine for cleaning boat hulls in the water |
| CN107671064B (zh) * | 2017-10-27 | 2020-04-03 | 上海理工大学 | 基于超声清洗的曲面吸附清洁装置 |
| CN109018245A (zh) * | 2018-07-12 | 2018-12-18 | 王奇光 | 一种游艇艇底的水下清洗装置 |
| CN109018243A (zh) * | 2018-10-15 | 2018-12-18 | 上海船舶研究设计院(中国船舶工业集团公司第六0四研究院) | 擦窗机及船舶 |
| IT201800010300A1 (it) | 2018-11-13 | 2020-05-13 | Guido Bardelli | Impianto galleggiante per il lavaggio e pulizia carene di navi vincolato alla riva o molo |
| CN110329450B (zh) * | 2019-05-14 | 2021-05-18 | 深圳市永德丰实业有限公司 | 一种码头调度管理系统 |
| CN117125216B (zh) * | 2023-08-29 | 2024-02-23 | 江苏海中洲船业有限公司 | 一种船舶修理用船底污垢清除装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3541988A (en) * | 1968-08-29 | 1970-11-24 | Henry J Laney | Cleaning system for vessels afloat |
| JPS4942157B1 (ja) * | 1970-10-24 | 1974-11-13 | ||
| FR2199311A5 (ja) * | 1972-09-11 | 1974-04-05 | Nal Expl Oceans Centre | |
| JPS49113397A (ja) * | 1973-03-09 | 1974-10-29 | ||
| US4007701A (en) * | 1975-11-11 | 1977-02-15 | Fike Don G | Marine vessel scrubbing device |
| JPS5311496A (en) * | 1976-07-16 | 1978-02-01 | Yoshihiro Yonahara | Underwater inspection maintenance device of outside of ship |
| JPS5923495U (ja) * | 1982-08-04 | 1984-02-14 | 三井造船株式会社 | 船底の水中清掃装置 |
| JPS6136092A (ja) * | 1984-07-27 | 1986-02-20 | Sumitomo Heavy Ind Ltd | 海水中における遠隔作業装置 |
| JPS6143599U (ja) * | 1984-08-25 | 1986-03-22 | 三菱重工業株式会社 | 船舶の外板清掃装置 |
| US4784078A (en) * | 1987-12-21 | 1988-11-15 | Feurt Leo D | Floating small boat cleaning facility |
| JPH02114087A (ja) * | 1988-10-20 | 1990-04-26 | Tadamasa Kato | 船底清掃用装置 |
| FI1137U1 (fi) * | 1993-08-30 | 1994-01-19 | Jaakko Hermanni Sarvela | Baottvaettmaskin |
| FR2723908B1 (fr) * | 1994-03-31 | 1998-04-03 | Le Guen Gabriel | Station de lavage et de manutention de bateaux a flot et hors de l'eau |
| DE29607426U1 (de) * | 1996-04-26 | 1996-06-20 | Weber Manfred Dipl Ing Fh | Vorrichtung zur Außenreinigung von Schiffsrümpfen |
| NL1010114C2 (nl) * | 1998-09-16 | 2000-03-17 | Fratomex Holding B V | Wasinrichting voor een vaartuig alsmede werkwijze voor het wassen van een vaartuig. |
| EP1060983A1 (de) | 1999-06-15 | 2000-12-20 | Klaus Baumeister | Vorrichtung zum Reinigen der Aussenflächen von Booten und Yachten |
| JP2005153595A (ja) * | 2003-11-21 | 2005-06-16 | Shin Kurushima Dockyard Co Ltd | 係船制御システム |
-
2005
- 2005-11-29 IT IT002279A patent/ITMI20052279A1/it unknown
-
2006
- 2006-09-25 DK DK06793803.5T patent/DK1981755T3/da active
- 2006-09-25 JP JP2008541670A patent/JP5143742B2/ja not_active Expired - Fee Related
- 2006-09-25 PL PL06793803T patent/PL1981755T3/pl unknown
- 2006-09-25 WO PCT/EP2006/066696 patent/WO2007062886A1/en active Application Filing
- 2006-09-25 SI SI200631130T patent/SI1981755T1/sl unknown
- 2006-09-25 AT AT06793803T patent/ATE515428T1/de not_active IP Right Cessation
- 2006-09-25 US US12/095,061 patent/US20080282956A1/en not_active Abandoned
- 2006-09-25 EP EP06793803A patent/EP1981755B1/en active Active
- 2006-09-25 ES ES06793803T patent/ES2369988T3/es active Active
- 2006-09-25 CN CN2006800443075A patent/CN101341066B/zh not_active Expired - Fee Related
- 2006-09-25 RU RU2008126247/11A patent/RU2008126247A/ru not_active Application Discontinuation
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8390641B2 (en) | 2009-02-23 | 2013-03-05 | Fujitsu Limited | Device and method for multicolor vector image processing |
Also Published As
| Publication number | Publication date |
|---|---|
| ITMI20052279A1 (it) | 2007-05-30 |
| PL1981755T3 (pl) | 2012-02-29 |
| JP2009517260A (ja) | 2009-04-30 |
| EP1981755B1 (en) | 2011-07-06 |
| WO2007062886A1 (en) | 2007-06-07 |
| SI1981755T1 (sl) | 2012-02-29 |
| DK1981755T3 (da) | 2011-10-24 |
| CN101341066A (zh) | 2009-01-07 |
| RU2008126247A (ru) | 2010-01-10 |
| US20080282956A1 (en) | 2008-11-20 |
| ATE515428T1 (de) | 2011-07-15 |
| ES2369988T3 (es) | 2011-12-09 |
| EP1981755A1 (en) | 2008-10-22 |
| CN101341066B (zh) | 2013-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5143742B2 (ja) | ボートの特に船体を洗浄するための自動洗浄用の船舶用設備 | |
| US4043286A (en) | Boat hull scrubbing apparatus | |
| KR101549378B1 (ko) | 수중 청소로봇 | |
| US20050199171A1 (en) | Ship hull cleaning apparatus and method of use | |
| TW201943607A (zh) | 水下船體清洗器、船體清洗系統以及清洗船體的方法 | |
| KR20160052986A (ko) | 수중 청소로봇 | |
| US7748337B2 (en) | Automatic boat washing assembly | |
| JP2016534919A (ja) | 自動ボート洗浄ドック、及び自動ボート洗浄ドック内でのボート洗浄のための関連の方法 | |
| US6067921A (en) | Device for external cleaning of ship's hulls | |
| US4690092A (en) | Aquatic scrubbing device | |
| KR20150053466A (ko) | 수중 청소로봇 | |
| KR101814622B1 (ko) | 이물질수거장치 및 이를 포함하는 수중청소로봇 | |
| JP2007112167A (ja) | 海中曳航体の着水・曳航方法、着水揚収装置及び着水揚収装置を備えた船舶 | |
| KR20160075975A (ko) | 이물질수거장치 및 이를 포함하는 수중청소로봇 | |
| CN113182231B (zh) | 一种水下智能清刷机器人 | |
| CN112478079B (zh) | 船舶水下激光清洗装置 | |
| KR20150053476A (ko) | 수중 청소로봇 | |
| KR20150053460A (ko) | 수중 청소로봇 | |
| KR20160072309A (ko) | 조향 장치 및 이를 포함하는 선체면 청소로봇 | |
| KR101556254B1 (ko) | 수중 청소로봇 | |
| JP2577993B2 (ja) | 小型船舶の吊治具 | |
| JPS62122898A (ja) | 水中作業装置 | |
| JP2909804B2 (ja) | 石油貯蔵船船体の保守装置 | |
| KR102473796B1 (ko) | 선체 하부의 세척이 용이한 선박 인양 장치 | |
| CN220716824U (zh) | 一种用于跨海大桥桥墩清污的水下清洗机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110201 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110428 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110511 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110527 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110603 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110606 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120110 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120410 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120417 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120509 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121030 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121121 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151130 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |