JP5111226B2 - 画像処理方法、画像処理装置、及び、そのプログラムならびにコンピュータ読み取り可能な記憶媒体 - Google Patents
画像処理方法、画像処理装置、及び、そのプログラムならびにコンピュータ読み取り可能な記憶媒体 Download PDFInfo
- Publication number
- JP5111226B2 JP5111226B2 JP2008120296A JP2008120296A JP5111226B2 JP 5111226 B2 JP5111226 B2 JP 5111226B2 JP 2008120296 A JP2008120296 A JP 2008120296A JP 2008120296 A JP2008120296 A JP 2008120296A JP 5111226 B2 JP5111226 B2 JP 5111226B2
- Authority
- JP
- Japan
- Prior art keywords
- line
- image
- core
- pixel
- core line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003672 processing method Methods 0.000 title claims description 8
- 238000000034 method Methods 0.000 claims description 87
- 239000013598 vector Substances 0.000 claims description 39
- 238000000605 extraction Methods 0.000 claims description 14
- 238000000926 separation method Methods 0.000 claims description 12
- 239000000284 extract Substances 0.000 claims description 3
- 238000006243 chemical reaction Methods 0.000 description 21
- 230000006870 function Effects 0.000 description 15
- 238000010586 diagram Methods 0.000 description 8
- 238000004441 surface measurement Methods 0.000 description 6
- 230000003287 optical effect Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 206010052143 Ocular discomfort Diseases 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V30/00—Character recognition; Recognising digital ink; Document-oriented image-based pattern recognition
- G06V30/40—Document-oriented image-based pattern recognition
- G06V30/42—Document-oriented image-based pattern recognition based on the type of document
- G06V30/422—Technical drawings; Geographical maps
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/34—Smoothing or thinning of the pattern; Morphological operations; Skeletonisation
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Artificial Intelligence (AREA)
- Image Processing (AREA)
Description
はじめに、本実施形態の画像処理装置の構成例について、図3のブロック図を参照して説明する。
まずステップS201では入力画像として得られた二値画像に対して距離変換を行う。距離変換は二値画像中の図形画素(黒画素)の値を背景画素(白画素)からの距離値に置き換える処理である。距離変換に関しては非特許文献2の、鳥脇純一郎著“画像理解のためのディジタル画像処理(II)”初版, ISBN4-7856-2004-8, 昭晃堂, 昭和63年4月30日発行, P.32-P.37等に述べられている。距離変換により二値画像の図形画素毎に、一番近い背景までの背景画素までの距離が求められる。距離変換の中でも各画素に数学的な距離を与えるユークリッド距離変換を用いると斜め方向も考慮した距離をより正確に求めることができる。一例として、図4で示す線画像のユークリッド距離変換結果を図7に示す。
ステップS301では等幅線・面判定を行う芯線を選択する。芯線の選択はステップS100で得られた芯線をそれらの端点や交点間をつなぐ独立した線や閉曲線毎に、すなわち芯線の端点や交点間で区切った単位毎に、選ぶようにする。図9にはaからfの記号を振った交点とgからkまでの記号を割り振った端点が存在する。このときgからaの区間、aからbの区間、bからhの区間、aからcの区間といった単位で等幅線・面判定を行う芯線を決定する。
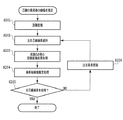
まず全ての芯線を、等幅線部を表す芯線か、面部(面図形)を表す芯線かに分ける処理を行う。ステップS401において、ステップS301で選択したのと同じく芯線をそれらの端点や交点間をつなぐ独立した線や閉曲線毎を単位として芯線を1つ選択する。そして、ステップS402で、選択した芯線がステップS300で等幅線と判定されたか面と判定されたかの情報を参照する。ここで、等幅線と判定されていた場合は芯線の情報をステップS403で線膨張対象画像に追加し、面と判定されていた場合は芯線の情報をステップS404で面膨張対象画像に追加する。
・原画像で図形画素(黒画素)かつ膨張処理を施した線膨張対象画像で背景画素(白画素)の時は図形画素とする。
・原画像で図形画素かつ膨張処理を施した線膨張対象画像で図形画素の時は背景画素とする。
・原画像で背景画素の時は背景画素とする。
以上のようにして得られる画像をもって、原画像と線膨張対象画像の差分を求める(差分算出)。
上記の実施形態1において、ステップS302において分散を求める対象とする画素は、判定対象の芯線の全画素を対象としてもよいし、一部分のみを対象としてもよい。他の芯線との交点付近では推定した画素毎線幅値が実際の値よりも大きくなるため、分散の計算から除いた方がより正確に等幅線判定を行うことができる。
上記の実施形態1及び2においては、距離変換をユークリッド距離変換で行う前提で話を進めたが、これに限らず他の手法を用いてもよい。すなわち、公知の距離変換手法としてのユークリッド距離変換の他にも、4近傍距離(シティブロック距離)、8近傍距離(チェスボード距離)、8角形距離等が知られており、いずれを用いてもよい。
本発明の目的は前述した実施形態で示したフローチャートの手順を実現するプログラムコードを記録した記録媒体から、システムあるいは装置のコンピュータ(またはCPUやMPU)がそのプログラムコードを読出し実行することによっても達成される。この場合、記憶媒体から読み出されたコンピュータ実行可能なプログラムコード自体が前述した実施形態の機能を実現することになる。そのため、このプログラムコード及びプログラムコードを記憶したコンピュータ読み取り可能な記憶媒体も本発明の一つを構成することになる。
2 画像メモリ
3 画像入出力I/O
4 通信I/F
5 RAM
6 ROM
7 CPU
8 ディスプレイ
9 キーボード
10 マウス
11 バス
12 外部記憶装置
13 I/O
14 映像I/O
15 I/O
Claims (14)
- 画像処理装置の画像入力手段が、ベクトル化処理対象画像を入力する画像入力工程と、
前記画像処理装置の芯線抽出手段が、前記ベクトル化処理対象画像の芯線を抽出する芯線抽出工程と、
前記画像処理装置の線幅推定手段が、前記芯線抽出工程にて得られる芯線の画素毎に元の線幅を計算する線幅推定工程と、
前記画像処理装置の判定手段が、前記芯線抽出工程にて得られた芯線を交点及び端点間で区切った区間毎に、前記線幅推定工程にて得られた芯線の画素毎の線幅値を用いて、等幅線を表しているか面図形を表しているかを判定する判定工程と、
前記画像処理装置の分離手段が、前記判定工程で前記等幅線を表すと判定された区間の芯線と、前記判定工程で前記面図形を表すと判定された区間の芯線と、前記ベクトル化処理対象画像とに基づいて、前記ベクトル化処理対象画像から前記等幅線に対応する部分の画像を除いた前記面図形に対応する部分の画像で構成される面画像を抽出する分離工程と、
前記画像処理装置の手段が、前記判定工程で等幅線と判定された芯線と、前記分離工程にて抽出された前記面画像の輪郭のそれぞれを関数近似する関数近似工程と
を有することを特徴とする画像処理方法。 - 前記芯線抽出工程は、前記ベクトル化処理対象画像に細線化処理を行うことにより、前記ベクトル化処理対象画像の芯線を抽出することを特徴とする請求項1に記載の画像処理方法。
- 前記線幅推定工程は
前記ベクトル化処理対象画像における各図形画素について、背景画素までの距離値に変換する工程と、
前記芯線の画素を順に注目芯線画素とし、当該注目芯線画素の周囲8近傍に位置する画素の距離値の最大値を注目芯線画素の距離値に加算することで当該注目芯線画素の線幅を推定する工程とからなることを特徴とする請求項1に記載の画像処理方法。 - 前記判定工程は
前記区間毎に芯線の線幅値の分散を求める工程と、
前記分散が閾値以下の場合に等幅線と判定する工程と、
前記分散が閾値より大きい場合に面図形と判定する工程とからなることを特徴とする請求項1に記載の画像処理方法。 - 前記判定工程で等幅線と判定した区間の芯線に対して線幅情報を推定し、推定した線幅情報をベクトルデータに付与することを特徴とする請求項1に記載の画像処理方法。
- 前記分離工程は
前記判定工程で等幅線と判定された区間の芯線に対して膨張処理する線膨張処理工程と、
前記判定工程で面図形と判定された区間の芯線に対して膨張処理する面膨張処理工程と、
前記ベクトル化処理対象画像と前記線膨張処理工程の結果との差分を求める差分算出工程と、
前記ベクトル化処理対象画像と前記面膨張処理工程の結果との論理積を求める論理積算出工程と、
前記差分算出工程の処理結果と前記論理積算出工程の処理結果との論理和を求めることにより、前記面画像を抽出する工程とからなることを特徴とする請求項1に記載の画像処理方法。 - ベクトル化処理対象画像を入力する画像入力手段と、
前記ベクトル化処理対象画像の芯線を抽出する芯線抽出手段と、
前記芯線抽出手段にて得られる芯線の画素毎に元の線幅を計算する線幅推定手段と、
前記芯線抽出手段にて得られた芯線を交点及び端点間で区切った区間毎に、前記線幅推定手段にて得られた芯線の画素毎の線幅値を用いて、等幅線を表しているか面図形を表しているかを判定する判定手段と、
前記判定手段で前記等幅線を表すと判定された区間の芯線と、前記判定工程で前記面図形を表すと判定された区間の芯線と、前記ベクトル化処理対象画像とに基づいて、前記ベクトル化処理対象画像から前記等幅線に対応する部分の画像を除いた前記面図形に対応する部分の画像で構成される面画像を抽出する分離手段と、
前記判定手段で等幅線と判定された芯線と、前記分離手段にて抽出された前記面画像の輪郭のそれぞれを関数近似する関数近似手段を有することを特徴とする画像処理装置。 - 前記芯線抽出手段は、前記ベクトル化処理対象画像に細線化処理を行うことにより、前記ベクトル化処理対象画像の芯線を抽出することを特徴とする請求項7に記載の画像処理装置。
- 前記線幅推定手段は
前記ベクトル化処理対象画像における各図形画素について、背景画素までの距離値に変換する手段と、
前記芯線の画素を順に注目芯線画素とし、当該注目芯線画素の周囲8近傍に位置する画素の距離値の最大値を注目芯線画素の距離値に加算することで前記注目芯線画素の線幅を推定する手段とからなることを特徴とする請求項7に記載の画像処理装置。 - 前記判定手段は
前記区間毎に芯線の線幅値の分散を求める手段と、
前記分散が閾値以下の場合に等幅線と判定する手段と、
前記分散が閾値より大きい場合に面図形と判定する手段とからなることを特徴とする請求項7に記載の画像処理装置。 - 前記判定手段で等幅線と判定した区間の芯線に対して線幅情報を推定し、推定した線幅情報をベクトルデータに付与することを特徴とする請求項7に記載の画像処理装置。
- 前記分離手段は
前記判定手段で等幅線と判定された区間の芯線に対して膨張処理する線膨張処理手段と、
前記判定手段で面図形と判定された区間の芯線に対して膨張処理する面膨張処理手段と、
前記ベクトル化処理対象画像と前記線膨張処理手段の結果との差分を求める差分算出手段と、
前記ベクトル化処理対象画像と前記面膨張処理手段の結果との論理積を求める論理積算出手段と、
前記差分算出手段の処理結果と前記論理積算出手段の処理結果との論理和を求めることにより、前記面画像を抽出する手段とからなることを特徴とする請求項7に記載の画像処理装置。 - コンピュータを、前記請求項7〜12のいずれかに記載の画像処理装置として機能させることを特徴とするプログラム。
- 請求項13に記載のプログラムを記憶したコンピュータ読み取り可能な記憶媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008120296A JP5111226B2 (ja) | 2008-05-02 | 2008-05-02 | 画像処理方法、画像処理装置、及び、そのプログラムならびにコンピュータ読み取り可能な記憶媒体 |
| US12/431,833 US8520951B2 (en) | 2008-05-02 | 2009-04-29 | Image processing method, image processing apparatus, and computer readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008120296A JP5111226B2 (ja) | 2008-05-02 | 2008-05-02 | 画像処理方法、画像処理装置、及び、そのプログラムならびにコンピュータ読み取り可能な記憶媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009271657A JP2009271657A (ja) | 2009-11-19 |
| JP2009271657A5 JP2009271657A5 (ja) | 2011-06-16 |
| JP5111226B2 true JP5111226B2 (ja) | 2013-01-09 |
Family
ID=41257133
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008120296A Expired - Fee Related JP5111226B2 (ja) | 2008-05-02 | 2008-05-02 | 画像処理方法、画像処理装置、及び、そのプログラムならびにコンピュータ読み取り可能な記憶媒体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8520951B2 (ja) |
| JP (1) | JP5111226B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5289066B2 (ja) * | 2009-01-05 | 2013-09-11 | キヤノン株式会社 | 画像処理方法、画像処理装置及びコンピュータプログラム |
| JP5335581B2 (ja) * | 2009-07-01 | 2013-11-06 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| JP6184271B2 (ja) | 2013-09-19 | 2017-08-23 | キヤノン株式会社 | 撮像管理装置、撮像管理システムの制御方法およびプログラム |
| KR102294423B1 (ko) * | 2016-04-07 | 2021-08-26 | (주) 아키드로우 | 윈도우 이미지 검출 방법 및 장치 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2940956B2 (ja) * | 1988-11-30 | 1999-08-25 | 株式会社リコー | 線図形の特徴抽出方法 |
| EP0858210B1 (en) * | 1990-03-05 | 2003-12-17 | Canon Kabushiki Kaisha | Image processing apparatus |
| JP2542947B2 (ja) * | 1990-05-09 | 1996-10-09 | 大日本スクリーン製造株式会社 | 画像処理装置 |
| JP3026592B2 (ja) | 1990-10-22 | 2000-03-27 | キヤノン株式会社 | 輪郭抽出方法及びその装置 |
| JPH05108823A (ja) | 1991-10-21 | 1993-04-30 | Canon Inc | 輪郭抽出方法及び装置 |
| JPH0620040A (ja) | 1992-07-02 | 1994-01-28 | Meidensha Corp | 画像処理装置 |
| JP3674067B2 (ja) * | 1994-11-29 | 2005-07-20 | 松下電器産業株式会社 | パターン外観検査装置 |
| JPH09138471A (ja) * | 1995-09-13 | 1997-05-27 | Fuji Photo Film Co Ltd | 特定形状領域の抽出方法、特定領域の抽出方法及び複写条件決定方法 |
| JP3679512B2 (ja) * | 1996-07-05 | 2005-08-03 | キヤノン株式会社 | 画像抽出装置および方法 |
| US6084989A (en) * | 1996-11-15 | 2000-07-04 | Lockheed Martin Corporation | System and method for automatically determining the position of landmarks in digitized images derived from a satellite-based imaging system |
| EP0989737A3 (en) * | 1998-09-21 | 2003-09-24 | Konica Corporation | Image recording apparatus |
| JP2001060247A (ja) * | 1999-06-14 | 2001-03-06 | Fuji Xerox Co Ltd | 画像処理装置および画像処理方法 |
| JP4586241B2 (ja) | 2000-06-14 | 2010-11-24 | コニカミノルタビジネステクノロジーズ株式会社 | 画像処理装置 |
| US6961462B2 (en) * | 2001-01-22 | 2005-11-01 | Matsushita Electric Industrial Co., Ltd. | Image processing method and image processor |
| JP4118749B2 (ja) * | 2002-09-05 | 2008-07-16 | 株式会社リコー | 画像処理装置、画像処理プログラムおよび記憶媒体 |
| JP4251629B2 (ja) | 2003-01-31 | 2009-04-08 | キヤノン株式会社 | 画像処理システム及び情報処理装置、並びに制御方法及びコンピュータプログラム及びコンピュータ可読記憶媒体 |
| US7391917B2 (en) * | 2003-02-13 | 2008-06-24 | Canon Kabushiki Kaisha | Image processing method |
| JP4217575B2 (ja) * | 2003-09-29 | 2009-02-04 | キヤノン株式会社 | 画像処理装置、画像処理方法ならびにプログラム、記憶媒体 |
| JP3796500B2 (ja) * | 2003-11-21 | 2006-07-12 | キヤノン株式会社 | 画像処理装置及びその制御方法、プログラム |
| KR100747879B1 (ko) * | 2004-06-10 | 2007-08-08 | 캐논 가부시끼가이샤 | 화상 처리 장치, 제어 방법 및 기록 매체 |
| JP2006023945A (ja) * | 2004-07-07 | 2006-01-26 | Canon Inc | 画像処理システム及び画像処理方法 |
| JP2006025129A (ja) * | 2004-07-07 | 2006-01-26 | Canon Inc | 画像処理システム及び画像処理方法 |
| JP2006277150A (ja) * | 2005-03-28 | 2006-10-12 | Fuji Xerox Co Ltd | 画像分離装置、画像分離方法およびプログラム |
| US7889938B2 (en) | 2006-03-31 | 2011-02-15 | Canon Kabushiki Kaisha | Method and apparatus for processing line drawings in images |
| JP2008027132A (ja) * | 2006-07-20 | 2008-02-07 | Canon Inc | 画像処理方法、画像処理装置、及び、プログラム、プログラム記憶媒体 |
| JP5636807B2 (ja) * | 2010-08-12 | 2014-12-10 | 富士ゼロックス株式会社 | 画像処理装置及びプログラム |
-
2008
- 2008-05-02 JP JP2008120296A patent/JP5111226B2/ja not_active Expired - Fee Related
-
2009
- 2009-04-29 US US12/431,833 patent/US8520951B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009271657A (ja) | 2009-11-19 |
| US8520951B2 (en) | 2013-08-27 |
| US20090274394A1 (en) | 2009-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6705912B2 (ja) | 画像内の文字領域を認識するための方法及び装置 | |
| EP0977151B1 (en) | Image processing apparatus, image processing method, and storage medium | |
| US8290256B2 (en) | Image processing apparatus and image processing method | |
| US7889938B2 (en) | Method and apparatus for processing line drawings in images | |
| JP5111226B2 (ja) | 画像処理方法、画像処理装置、及び、そのプログラムならびにコンピュータ読み取り可能な記憶媒体 | |
| JP5600524B2 (ja) | 画像処理装置、画像処理方法、プログラム、および記憶媒体 | |
| JP6294700B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP4804382B2 (ja) | 画像処理方法、画像処理プログラムおよび画像処理装置 | |
| JP4441300B2 (ja) | 画像処理装置、画像処理方法、画像処理プログラムおよびこのプログラムを記憶した記録媒体 | |
| JP5289066B2 (ja) | 画像処理方法、画像処理装置及びコンピュータプログラム | |
| JP2004120092A (ja) | 画像処理装置、画像処理システム、画像処理方法、記憶媒体、及びプログラム | |
| JP5888989B2 (ja) | 画像処理装置および画像処理方法 | |
| JP4873554B2 (ja) | 画像配信装置および画像配信方法 | |
| JPH07334648A (ja) | 画像処理方法及びその装置 | |
| JP4259949B2 (ja) | 画像作成装置、画像作成プログラムおよび記録媒体 | |
| JP2775122B2 (ja) | イラストデータの自動輪郭抽出ベクトル化処理方法,及びそれに使用する処理装置 | |
| JP2008225654A (ja) | 画像処理方法、画像処理装置、及び、プログラム、プログラム記憶媒体 | |
| US6717697B1 (en) | Image-component rendering method and recording medium in which image-component rendering program is recorded | |
| JP2008225653A (ja) | 画像処理方法、画像処理装置、及び、プログラム、プログラム記憶媒体 | |
| JP4259950B2 (ja) | 画像認識装置、画像認識プログラムおよび記録媒体 | |
| JP4186832B2 (ja) | 画像処理装置 | |
| JP2011198246A (ja) | 画像処理方法、画像処理装置、プログラム及びプログラム記憶媒体 | |
| JP4043629B2 (ja) | 画像データ変換方法、画像部品化方法、画像データ変換プログラムを記録した記録媒体及び画像部品化プログラムを記録した記録媒体 | |
| JP5560780B2 (ja) | 画像処理装置及び画像処理プログラム | |
| JP2008027132A (ja) | 画像処理方法、画像処理装置、及び、プログラム、プログラム記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20101106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110426 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110426 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120306 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120309 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120508 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120911 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121009 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5111226 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |