JP5020597B2 - 位置決め装置、露光装置、及びデバイス製造方法 - Google Patents
位置決め装置、露光装置、及びデバイス製造方法 Download PDFInfo
- Publication number
- JP5020597B2 JP5020597B2 JP2006293154A JP2006293154A JP5020597B2 JP 5020597 B2 JP5020597 B2 JP 5020597B2 JP 2006293154 A JP2006293154 A JP 2006293154A JP 2006293154 A JP2006293154 A JP 2006293154A JP 5020597 B2 JP5020597 B2 JP 5020597B2
- Authority
- JP
- Japan
- Prior art keywords
- stage
- repulsive force
- magnet
- repulsive
- thrust
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70758—Drive means, e.g. actuators, motors for long- or short-stroke modules or fine or coarse driving
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70766—Reaction force control means, e.g. countermass
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K16/00—Machines with more than one rotor or stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2201/00—Specific aspects not provided for in the other groups of this subclass relating to the magnetic circuits
- H02K2201/18—Machines moving with multiple degrees of freedom
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/106—Structural association with clutches, brakes, gears, pulleys or mechanical starters with dynamo-electric brakes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/118—Structural association with clutches, brakes, gears, pulleys or mechanical starters with starting devices
- H02K7/1185—Structural association with clutches, brakes, gears, pulleys or mechanical starters with starting devices with a mechanical one-way direction control, i.e. with means for reversing the direction of rotation of the rotor
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Linear Motors (AREA)
Description
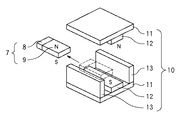
図1に、本実施形態における位置決め装置の構成を示す。同図(a)は平面図、(b)は正面図である。この図において、1は本体ベース、2はベースガイド、3は工作物、4はステージである。また、5はリニアモータ可動子、6は高精度リニアモータ固定子、7は反発可動子、10は反発固定子、14は軸受けとしての静圧パッド、16は大推力リニアモータ固定子、17は反射ミラーである。
図4に第2の実施形態の位置決め装置の構成を示す。同図(a)は平面図、(b)は正面図である。図1と共通する構成要素には同じ参照番号を使用する。
図5に第3の実施形態の位置決め装置の構成を示す。同図(a)は平面図、(b)は、(a)の矢印B方向からみた反発固定子10まわりの要部側面図である。
以下、本発明の位置決め装置が適用される例示的な露光装置を説明する。
次に、図9及び図10を参照して、上述の露光装置を利用したデバイス製造方法の実施形態を説明する。図9は、デバイス(ICやLSIなどの半導体チップ、LCD、CCD等)の製造を説明するためのフローチャートである。ここでは、半導体チップの製造方法を例に説明する。
Claims (7)
- ベースガイドの表面に沿う第1方向に移動可能なステージの位置決めを行う位置決め装置であって、
前記ステージを前記第1方向に往復駆動する駆動手段と、
前記ステージの前記第1方向における駆動ストロークの端部において同極磁石が対面するように前記ステージに設けられる可動子および前記ベースガイドに設けられる固定子を含み、前記同極磁石の対面面積に応じた、前記ステージの推力に対する反発力を発生させる反発力発生手段と、
前記ステージに前記反発力を上回る推力を与えて前記同極磁石の対面面積を拡大させることにより、前記反発力を補強する反発力補強手段と、
を有し、
前記駆動手段は、前記反発力が作用しない領域に設けられる一方、前記反発力補強手段は、前記反発力が作用する領域に設けられる
ことを特徴とする位置決め装置。 - 前記反発力補強手段により発生する推力は前記駆動手段により発生する推力よりも大きいことを特徴とする請求項1に記載の位置決め装置。
- 前記駆動手段は空芯タイプのリニアモータであり、
前記反発力補強手段は鉄芯タイプのリニアモータである
ことを特徴とする請求項1又は2に記載の位置決め装置。 - ベースガイドの表面に沿う第1方向に移動可能なステージの位置決めを行う位置決め装置であって、
前記ステージを前記第1方向に往復駆動する駆動手段と、
前記ステージの前記第1方向における駆動ストロークの端部において同極磁石が対面するように前記ステージに設けられる可動子および前記ベースガイドに設けられる固定子を含み、前記同極磁石の対面面積に応じた、前記ステージの推力に対する反発力を発生させる反発力発生手段と、
前記ステージに前記反発力を上回る推力を与えて前記同極磁石の対面面積を拡大させることにより、前記反発力を補強する反発力補強手段と、
前記反発力発生手段の前記固定子および前記反発力補強手段の位置を調整する調整手段と、
を有することを特徴とする位置決め装置。 - ベースガイドの表面に沿う第1方向に移動可能なステージの位置決めを行う位置決め装置であって、
前記ステージを前記第1方向に往復駆動する駆動手段と、
前記ステージの前記第1方向における駆動ストロークの端部において同極磁石が対面するように前記ステージに設けられる可動子および前記ベースガイドに設けられる固定子を含み、前記同極磁石の対面面積に応じた、前記ステージの推力に対する反発力を発生させる反発力発生手段と、
前記ステージに前記反発力を上回る推力を与えて前記同極磁石の対面面積を拡大させることにより、前記反発力を補強する反発力補強手段と、
予め定められた速度プロファイルに基づいて前記反発力補強手段により発生する推力を制御する制御手段と、
を有することを特徴とする位置決め装置。 - 請求項1乃至5のいずれか1項に記載の位置決め装置によってレチクルステージの位置決めを行うことを特徴とする露光装置。
- 請求項6に記載の露光装置を用いてウエハを露光する工程と、
前記ウエハを現像する工程と、
を有することを特徴とするデバイス製造方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006293154A JP5020597B2 (ja) | 2006-10-27 | 2006-10-27 | 位置決め装置、露光装置、及びデバイス製造方法 |
| TW096138890A TW200844683A (en) | 2006-10-27 | 2007-10-17 | Positioning apparatus, exposure apparatus, and device manufacturing method |
| KR1020070104450A KR20080038015A (ko) | 2006-10-27 | 2007-10-17 | 위치결정장치, 노광장치, 및 디바이스 제조방법 |
| US11/874,482 US7804207B2 (en) | 2006-10-27 | 2007-10-18 | Positioning apparatus, exposure apparatus, and device manufacturing method using repulsion force generation |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006293154A JP5020597B2 (ja) | 2006-10-27 | 2006-10-27 | 位置決め装置、露光装置、及びデバイス製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008112757A JP2008112757A (ja) | 2008-05-15 |
| JP2008112757A5 JP2008112757A5 (ja) | 2009-12-10 |
| JP5020597B2 true JP5020597B2 (ja) | 2012-09-05 |
Family
ID=39329275
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006293154A Expired - Fee Related JP5020597B2 (ja) | 2006-10-27 | 2006-10-27 | 位置決め装置、露光装置、及びデバイス製造方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7804207B2 (ja) |
| JP (1) | JP5020597B2 (ja) |
| KR (1) | KR20080038015A (ja) |
| TW (1) | TW200844683A (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5020597B2 (ja) * | 2006-10-27 | 2012-09-05 | キヤノン株式会社 | 位置決め装置、露光装置、及びデバイス製造方法 |
| US7932646B2 (en) * | 2007-01-15 | 2011-04-26 | Canon Kabushiki Kaisha | Exposure apparatus with a stage, driving unit,and force applying unit having a separate magnetic shield |
| KR20130015864A (ko) * | 2011-08-05 | 2013-02-14 | 삼성전기주식회사 | 리니어진동장치 |
| US9298106B1 (en) * | 2011-09-07 | 2016-03-29 | Kla-Tencor Corporation | Wafer stage with reciprocating wafer stage actuation control |
| JP5878676B2 (ja) * | 2012-10-09 | 2016-03-08 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 位置決めの装置、制御装置及び制御方法 |
| CN104049472B (zh) * | 2014-06-30 | 2016-03-30 | 清华大学 | 一种电磁弹射启动式掩模台系统 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3614181A (en) * | 1970-07-02 | 1971-10-19 | Us Air Force | Magnetic bearing for combined radial and thrust loads |
| US4890023A (en) * | 1985-02-19 | 1989-12-26 | Hinds Walter E | Linear induction motor systems |
| JP3363662B2 (ja) * | 1994-05-19 | 2003-01-08 | キヤノン株式会社 | 走査ステージ装置およびこれを用いた露光装置 |
| JP3720593B2 (ja) * | 1998-09-09 | 2005-11-30 | キヤノン株式会社 | ステージ装置、露光装置および露光方法 |
| US6144118A (en) * | 1998-09-18 | 2000-11-07 | General Scanning, Inc. | High-speed precision positioning apparatus |
| JP3849932B2 (ja) * | 2002-08-12 | 2006-11-22 | キヤノン株式会社 | 移動ステージ装置 |
| JP2004172557A (ja) * | 2002-11-22 | 2004-06-17 | Canon Inc | ステージ装置及びその制御方法 |
| JP2007258356A (ja) * | 2006-03-22 | 2007-10-04 | Canon Inc | ステージ装置 |
| JP2008010643A (ja) * | 2006-06-29 | 2008-01-17 | Canon Inc | ステージ装置 |
| JP5020597B2 (ja) * | 2006-10-27 | 2012-09-05 | キヤノン株式会社 | 位置決め装置、露光装置、及びデバイス製造方法 |
| US20080170213A1 (en) * | 2007-01-12 | 2008-07-17 | Canon Kabushiki Kaisha | Stage apparatus, exposure apparatus, and device manufacturing method |
| US7932646B2 (en) * | 2007-01-15 | 2011-04-26 | Canon Kabushiki Kaisha | Exposure apparatus with a stage, driving unit,and force applying unit having a separate magnetic shield |
-
2006
- 2006-10-27 JP JP2006293154A patent/JP5020597B2/ja not_active Expired - Fee Related
-
2007
- 2007-10-17 KR KR1020070104450A patent/KR20080038015A/ko active IP Right Grant
- 2007-10-17 TW TW096138890A patent/TW200844683A/zh unknown
- 2007-10-18 US US11/874,482 patent/US7804207B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US7804207B2 (en) | 2010-09-28 |
| KR20080038015A (ko) | 2008-05-02 |
| US20080100149A1 (en) | 2008-05-01 |
| TW200844683A (en) | 2008-11-16 |
| JP2008112757A (ja) | 2008-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7368838B2 (en) | High efficiency voice coil motor | |
| US7880864B2 (en) | Stage apparatus, exposure apparatus, and device manufacturing method | |
| KR100880618B1 (ko) | 스테이지 장치 | |
| JP5020597B2 (ja) | 位置決め装置、露光装置、及びデバイス製造方法 | |
| WO2008130560A1 (en) | Three degree of movement mover and method for controlling the same | |
| US7817251B2 (en) | Supporting apparatus, exposure apparatus, and device manufacturing method | |
| JP2009136065A (ja) | 平面モータおよびそれを用いたステージ | |
| JP2007258356A (ja) | ステージ装置 | |
| US7830046B2 (en) | Damper for a stage assembly | |
| JP2008182210A (ja) | ステージ装置、露光装置及びデバイス製造方法 | |
| US7253576B2 (en) | E/I core actuator commutation formula and control method | |
| US6593997B1 (en) | Stage assembly including a reaction assembly | |
| US20070268475A1 (en) | System and method for controlling a stage assembly | |
| US6844694B2 (en) | Stage assembly and exposure apparatus including the same | |
| US20050162802A1 (en) | Offset gap control for electromagnetic devices | |
| US7738114B2 (en) | Exposure apparatus configured to minimize effects of mechanism for measuring stage position on peripheral mechanism and device-manufacturing method | |
| JP2008199876A (ja) | ステージ装置および露光装置 | |
| US7468783B2 (en) | Exposure apparatus, control method for the same, and device manufacturing method | |
| JP2008078377A (ja) | ステージ装置、露光装置及びデバイス製造方法 | |
| US20060232140A1 (en) | System and method for controlling a stage assembly | |
| JP2008130854A (ja) | 位置決め装置、露光装置及びデバイス製造方法 | |
| JP2008153546A (ja) | 移動体機構 | |
| JP2008159991A (ja) | ステージ装置、露光装置及びデバイス製造方法 | |
| JPH10313567A (ja) | リニアモータおよびステージ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091026 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091026 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111027 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120611 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120613 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150622 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |