JP4986006B2 - 脊椎の不整を治療する装置 - Google Patents
脊椎の不整を治療する装置 Download PDFInfo
- Publication number
- JP4986006B2 JP4986006B2 JP2002516975A JP2002516975A JP4986006B2 JP 4986006 B2 JP4986006 B2 JP 4986006B2 JP 2002516975 A JP2002516975 A JP 2002516975A JP 2002516975 A JP2002516975 A JP 2002516975A JP 4986006 B2 JP4986006 B2 JP 4986006B2
- Authority
- JP
- Japan
- Prior art keywords
- shaft
- electrode
- tissue
- active electrode
- probe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 claims description 149
- 239000000463 material Substances 0.000 claims description 32
- 238000005452 bending Methods 0.000 claims description 25
- 239000000919 ceramic Substances 0.000 claims description 13
- 238000002271 resection Methods 0.000 claims description 13
- 238000004519 manufacturing process Methods 0.000 claims description 11
- 239000011521 glass Substances 0.000 claims description 8
- 229920001296 polysiloxane Polymers 0.000 claims description 5
- 210000001519 tissue Anatomy 0.000 description 364
- 239000000523 sample Substances 0.000 description 201
- 239000012530 fluid Substances 0.000 description 172
- 238000002679 ablation Methods 0.000 description 62
- 238000005345 coagulation Methods 0.000 description 44
- 230000015271 coagulation Effects 0.000 description 44
- 239000010410 layer Substances 0.000 description 43
- 210000005036 nerve Anatomy 0.000 description 43
- 210000003128 head Anatomy 0.000 description 42
- 238000010438 heat treatment Methods 0.000 description 39
- 102000008186 Collagen Human genes 0.000 description 27
- 108010035532 Collagen Proteins 0.000 description 27
- 229920001436 collagen Polymers 0.000 description 27
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 25
- 210000004204 blood vessel Anatomy 0.000 description 25
- 230000006378 damage Effects 0.000 description 23
- 238000001356 surgical procedure Methods 0.000 description 23
- 229910052751 metal Inorganic materials 0.000 description 22
- 239000002184 metal Substances 0.000 description 21
- 208000002193 Pain Diseases 0.000 description 20
- 239000000835 fiber Substances 0.000 description 19
- 230000008602 contraction Effects 0.000 description 18
- 230000006870 function Effects 0.000 description 18
- 230000008569 process Effects 0.000 description 18
- 210000000988 bone and bone Anatomy 0.000 description 17
- 238000010494 dissociation reaction Methods 0.000 description 17
- 230000005593 dissociations Effects 0.000 description 17
- 239000007789 gas Substances 0.000 description 17
- 230000000670 limiting effect Effects 0.000 description 17
- 239000007788 liquid Substances 0.000 description 16
- 206010019909 Hernia Diseases 0.000 description 15
- 230000005684 electric field Effects 0.000 description 14
- 238000005520 cutting process Methods 0.000 description 13
- 230000035515 penetration Effects 0.000 description 13
- 230000007246 mechanism Effects 0.000 description 12
- 239000008280 blood Substances 0.000 description 11
- 210000004369 blood Anatomy 0.000 description 11
- 239000003990 capacitor Substances 0.000 description 11
- 239000004020 conductor Substances 0.000 description 11
- 238000001704 evaporation Methods 0.000 description 11
- 239000002245 particle Substances 0.000 description 11
- 230000009467 reduction Effects 0.000 description 11
- 230000002829 reductive effect Effects 0.000 description 11
- 230000003685 thermal hair damage Effects 0.000 description 11
- 210000004027 cell Anatomy 0.000 description 10
- 238000010586 diagram Methods 0.000 description 10
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 10
- 230000017074 necrotic cell death Effects 0.000 description 9
- 239000011780 sodium chloride Substances 0.000 description 9
- 229910001220 stainless steel Inorganic materials 0.000 description 9
- 239000010935 stainless steel Substances 0.000 description 9
- 206010028980 Neoplasm Diseases 0.000 description 8
- 229910045601 alloy Inorganic materials 0.000 description 8
- 239000000956 alloy Substances 0.000 description 8
- 230000008020 evaporation Effects 0.000 description 8
- 239000012634 fragment Substances 0.000 description 8
- 239000011159 matrix material Substances 0.000 description 8
- 210000004872 soft tissue Anatomy 0.000 description 8
- 230000000451 tissue damage Effects 0.000 description 8
- 231100000827 tissue damage Toxicity 0.000 description 8
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 7
- 230000005856 abnormality Effects 0.000 description 7
- 210000000577 adipose tissue Anatomy 0.000 description 7
- 230000008901 benefit Effects 0.000 description 7
- 238000000576 coating method Methods 0.000 description 7
- 238000002594 fluoroscopy Methods 0.000 description 7
- 150000002500 ions Chemical class 0.000 description 7
- 239000010936 titanium Substances 0.000 description 7
- 229910052719 titanium Inorganic materials 0.000 description 7
- 208000008035 Back Pain Diseases 0.000 description 6
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 6
- 125000004429 atom Chemical group 0.000 description 6
- 230000007547 defect Effects 0.000 description 6
- 230000004907 flux Effects 0.000 description 6
- 210000003041 ligament Anatomy 0.000 description 6
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 6
- 239000010937 tungsten Substances 0.000 description 6
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 6
- 208000003618 Intervertebral Disc Displacement Diseases 0.000 description 5
- 239000004642 Polyimide Substances 0.000 description 5
- 210000003484 anatomy Anatomy 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 5
- 210000000845 cartilage Anatomy 0.000 description 5
- 239000011248 coating agent Substances 0.000 description 5
- 210000002808 connective tissue Anatomy 0.000 description 5
- 238000002347 injection Methods 0.000 description 5
- 239000007924 injection Substances 0.000 description 5
- 210000004126 nerve fiber Anatomy 0.000 description 5
- 229910052697 platinum Inorganic materials 0.000 description 5
- 229920001721 polyimide Polymers 0.000 description 5
- 210000001032 spinal nerve Anatomy 0.000 description 5
- 230000003746 surface roughness Effects 0.000 description 5
- 229910052721 tungsten Inorganic materials 0.000 description 5
- 206010028836 Neck pain Diseases 0.000 description 4
- MCMNRKCIXSYSNV-UHFFFAOYSA-N Zirconium dioxide Chemical compound O=[Zr]=O MCMNRKCIXSYSNV-UHFFFAOYSA-N 0.000 description 4
- 238000013459 approach Methods 0.000 description 4
- 210000001367 artery Anatomy 0.000 description 4
- 230000000740 bleeding effect Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000004927 fusion Effects 0.000 description 4
- 230000023597 hemostasis Effects 0.000 description 4
- 238000002684 laminectomy Methods 0.000 description 4
- 210000003205 muscle Anatomy 0.000 description 4
- 239000013307 optical fiber Substances 0.000 description 4
- 210000000056 organ Anatomy 0.000 description 4
- 230000037361 pathway Effects 0.000 description 4
- 230000001817 pituitary effect Effects 0.000 description 4
- 210000000278 spinal cord Anatomy 0.000 description 4
- 210000002435 tendon Anatomy 0.000 description 4
- 239000004593 Epoxy Substances 0.000 description 3
- 206010051989 Internal hernia Diseases 0.000 description 3
- 206010050296 Intervertebral disc protrusion Diseases 0.000 description 3
- 208000031264 Nerve root compression Diseases 0.000 description 3
- 206010037779 Radiculopathy Diseases 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 3
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 3
- 239000006227 byproduct Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 230000006837 decompression Effects 0.000 description 3
- 210000001951 dura mater Anatomy 0.000 description 3
- 239000012777 electrically insulating material Substances 0.000 description 3
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 3
- 239000010931 gold Substances 0.000 description 3
- 239000007943 implant Substances 0.000 description 3
- 238000011065 in-situ storage Methods 0.000 description 3
- 210000002977 intracellular fluid Anatomy 0.000 description 3
- 210000000578 peripheral nerve Anatomy 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 239000000047 product Substances 0.000 description 3
- 150000003839 salts Chemical class 0.000 description 3
- 239000000779 smoke Substances 0.000 description 3
- 238000007711 solidification Methods 0.000 description 3
- 230000008023 solidification Effects 0.000 description 3
- 125000006850 spacer group Chemical group 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- 208000024891 symptom Diseases 0.000 description 3
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 2
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 206010061218 Inflammation Diseases 0.000 description 2
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 2
- 239000007864 aqueous solution Substances 0.000 description 2
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 2
- 230000036760 body temperature Effects 0.000 description 2
- 239000012267 brine Substances 0.000 description 2
- 230000001112 coagulating effect Effects 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 238000000354 decomposition reaction Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 238000010292 electrical insulation Methods 0.000 description 2
- 210000003722 extracellular fluid Anatomy 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 239000003574 free electron Substances 0.000 description 2
- 229910052737 gold Inorganic materials 0.000 description 2
- 239000001257 hydrogen Substances 0.000 description 2
- 229910052739 hydrogen Inorganic materials 0.000 description 2
- 125000004435 hydrogen atom Chemical class [H]* 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000004054 inflammatory process Effects 0.000 description 2
- 239000011810 insulating material Substances 0.000 description 2
- 230000001788 irregular Effects 0.000 description 2
- 230000003902 lesion Effects 0.000 description 2
- 210000004705 lumbosacral region Anatomy 0.000 description 2
- 230000008018 melting Effects 0.000 description 2
- 238000002844 melting Methods 0.000 description 2
- 150000002739 metals Chemical class 0.000 description 2
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 229910052750 molybdenum Inorganic materials 0.000 description 2
- 239000011733 molybdenum Substances 0.000 description 2
- 210000003097 mucus Anatomy 0.000 description 2
- 229910052759 nickel Inorganic materials 0.000 description 2
- 239000011368 organic material Substances 0.000 description 2
- 230000008520 organization Effects 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- -1 polytetrafluoroethylene Polymers 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 102000004169 proteins and genes Human genes 0.000 description 2
- 108090000623 proteins and genes Proteins 0.000 description 2
- 235000019592 roughness Nutrition 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- HPALAKNZSZLMCH-UHFFFAOYSA-M sodium;chloride;hydrate Chemical compound O.[Na+].[Cl-] HPALAKNZSZLMCH-UHFFFAOYSA-M 0.000 description 2
- 239000007779 soft material Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 210000000273 spinal nerve root Anatomy 0.000 description 2
- 230000000087 stabilizing effect Effects 0.000 description 2
- 150000003431 steroids Chemical class 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 229920001059 synthetic polymer Polymers 0.000 description 2
- 229910052715 tantalum Inorganic materials 0.000 description 2
- GUVRBAGPIYLISA-UHFFFAOYSA-N tantalum atom Chemical compound [Ta] GUVRBAGPIYLISA-UHFFFAOYSA-N 0.000 description 2
- 238000002560 therapeutic procedure Methods 0.000 description 2
- 210000000115 thoracic cavity Anatomy 0.000 description 2
- 230000000472 traumatic effect Effects 0.000 description 2
- 238000012800 visualization Methods 0.000 description 2
- 238000005406 washing Methods 0.000 description 2
- 241000894006 Bacteria Species 0.000 description 1
- OYPRJOBELJOOCE-UHFFFAOYSA-N Calcium Chemical compound [Ca] OYPRJOBELJOOCE-UHFFFAOYSA-N 0.000 description 1
- 241001631457 Cannula Species 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- UGFAIRIUMAVXCW-UHFFFAOYSA-N Carbon monoxide Chemical class [O+]#[C-] UGFAIRIUMAVXCW-UHFFFAOYSA-N 0.000 description 1
- 208000032544 Cicatrix Diseases 0.000 description 1
- XQFRJNBWHJMXHO-RRKCRQDMSA-N IDUR Chemical compound C1[C@H](O)[C@@H](CO)O[C@H]1N1C(=O)NC(=O)C(I)=C1 XQFRJNBWHJMXHO-RRKCRQDMSA-N 0.000 description 1
- DGAQECJNVWCQMB-PUAWFVPOSA-M Ilexoside XXIX Chemical compound C[C@@H]1CC[C@@]2(CC[C@@]3(C(=CC[C@H]4[C@]3(CC[C@@H]5[C@@]4(CC[C@@H](C5(C)C)OS(=O)(=O)[O-])C)C)[C@@H]2[C@]1(C)O)C)C(=O)O[C@H]6[C@@H]([C@H]([C@@H]([C@H](O6)CO)O)O)O.[Na+] DGAQECJNVWCQMB-PUAWFVPOSA-M 0.000 description 1
- FYYHWMGAXLPEAU-UHFFFAOYSA-N Magnesium Chemical compound [Mg] FYYHWMGAXLPEAU-UHFFFAOYSA-N 0.000 description 1
- 206010033425 Pain in extremity Diseases 0.000 description 1
- 241001631646 Papillomaviridae Species 0.000 description 1
- 208000031481 Pathologic Constriction Diseases 0.000 description 1
- ZLMJMSJWJFRBEC-UHFFFAOYSA-N Potassium Chemical compound [K] ZLMJMSJWJFRBEC-UHFFFAOYSA-N 0.000 description 1
- 208000008765 Sciatica Diseases 0.000 description 1
- 206010041235 Snoring Diseases 0.000 description 1
- 208000020307 Spinal disease Diseases 0.000 description 1
- 208000007536 Thrombosis Diseases 0.000 description 1
- NRTOMJZYCJJWKI-UHFFFAOYSA-N Titanium nitride Chemical compound [Ti]#N NRTOMJZYCJJWKI-UHFFFAOYSA-N 0.000 description 1
- 208000007097 Urinary Bladder Neoplasms Diseases 0.000 description 1
- 206010046798 Uterine leiomyoma Diseases 0.000 description 1
- 210000001015 abdomen Anatomy 0.000 description 1
- 210000000683 abdominal cavity Anatomy 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000002547 anomalous effect Effects 0.000 description 1
- 230000003110 anti-inflammatory effect Effects 0.000 description 1
- 229910052786 argon Inorganic materials 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000010420 art technique Methods 0.000 description 1
- 238000005422 blasting Methods 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 239000011575 calcium Substances 0.000 description 1
- 229910052791 calcium Inorganic materials 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 239000001569 carbon dioxide Substances 0.000 description 1
- 229910002092 carbon dioxide Inorganic materials 0.000 description 1
- 229910002090 carbon oxide Inorganic materials 0.000 description 1
- 238000003763 carbonization Methods 0.000 description 1
- 230000000747 cardiac effect Effects 0.000 description 1
- 238000007675 cardiac surgery Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 210000000170 cell membrane Anatomy 0.000 description 1
- 230000005465 channeling Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 210000000038 chest Anatomy 0.000 description 1
- 230000001684 chronic effect Effects 0.000 description 1
- 208000037976 chronic inflammation Diseases 0.000 description 1
- 230000006020 chronic inflammation Effects 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000001595 contractor effect Effects 0.000 description 1
- 239000002872 contrast media Substances 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 239000003246 corticosteroid Substances 0.000 description 1
- 229960001334 corticosteroids Drugs 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 210000003792 cranial nerve Anatomy 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 238000001035 drying Methods 0.000 description 1
- 239000007772 electrode material Substances 0.000 description 1
- 238000012976 endoscopic surgical procedure Methods 0.000 description 1
- 210000004955 epithelial membrane Anatomy 0.000 description 1
- 210000000981 epithelium Anatomy 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 210000000887 face Anatomy 0.000 description 1
- 230000001815 facial effect Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 238000002682 general surgery Methods 0.000 description 1
- 239000002241 glass-ceramic Substances 0.000 description 1
- 229910001922 gold oxide Inorganic materials 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000000227 grinding Methods 0.000 description 1
- 230000035876 healing Effects 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 208000006454 hepatitis Diseases 0.000 description 1
- 231100000283 hepatitis Toxicity 0.000 description 1
- 229930195733 hydrocarbon Natural products 0.000 description 1
- 150000002430 hydrocarbons Chemical class 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000007373 indentation Methods 0.000 description 1
- 229910010272 inorganic material Inorganic materials 0.000 description 1
- 239000011147 inorganic material Substances 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000002427 irreversible effect Effects 0.000 description 1
- 201000010260 leiomyoma Diseases 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000011777 magnesium Substances 0.000 description 1
- 229910052749 magnesium Inorganic materials 0.000 description 1
- 210000004379 membrane Anatomy 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012806 monitoring device Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000000877 morphologic effect Effects 0.000 description 1
- 230000004899 motility Effects 0.000 description 1
- 210000003928 nasal cavity Anatomy 0.000 description 1
- 230000001338 necrotic effect Effects 0.000 description 1
- 230000007383 nerve stimulation Effects 0.000 description 1
- 210000000944 nerve tissue Anatomy 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 229910017464 nitrogen compound Inorganic materials 0.000 description 1
- 150000002830 nitrogen compounds Chemical class 0.000 description 1
- 239000000615 nonconductor Substances 0.000 description 1
- 230000009972 noncorrosive effect Effects 0.000 description 1
- 210000001331 nose Anatomy 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- MUMZUERVLWJKNR-UHFFFAOYSA-N oxoplatinum Chemical compound [Pt]=O MUMZUERVLWJKNR-UHFFFAOYSA-N 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 231100000435 percutaneous penetration Toxicity 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 206010034674 peritonitis Diseases 0.000 description 1
- 229910003446 platinum oxide Inorganic materials 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 239000011148 porous material Substances 0.000 description 1
- 239000011591 potassium Substances 0.000 description 1
- 229910052700 potassium Inorganic materials 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 210000002307 prostate Anatomy 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000012783 reinforcing fiber Substances 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 231100000241 scar Toxicity 0.000 description 1
- 230000037387 scars Effects 0.000 description 1
- 206010039722 scoliosis Diseases 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 235000019615 sensations Nutrition 0.000 description 1
- 230000001953 sensory effect Effects 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000002210 silicon-based material Substances 0.000 description 1
- 229920002379 silicone rubber Polymers 0.000 description 1
- 239000004945 silicone rubber Substances 0.000 description 1
- 231100000075 skin burn Toxicity 0.000 description 1
- 208000017520 skin disease Diseases 0.000 description 1
- 201000002859 sleep apnea Diseases 0.000 description 1
- 150000003384 small molecules Chemical class 0.000 description 1
- 239000011734 sodium Substances 0.000 description 1
- 229910052708 sodium Inorganic materials 0.000 description 1
- 229910001415 sodium ion Inorganic materials 0.000 description 1
- 241000894007 species Species 0.000 description 1
- 238000010186 staining Methods 0.000 description 1
- 229910001256 stainless steel alloy Inorganic materials 0.000 description 1
- 230000036262 stenosis Effects 0.000 description 1
- 208000037804 stenosis Diseases 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
- 238000000859 sublimation Methods 0.000 description 1
- 230000008022 sublimation Effects 0.000 description 1
- 239000002344 surface layer Substances 0.000 description 1
- 230000008961 swelling Effects 0.000 description 1
- 210000005222 synovial tissue Anatomy 0.000 description 1
- 235000019587 texture Nutrition 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
- 238000002207 thermal evaporation Methods 0.000 description 1
- 229910001930 tungsten oxide Inorganic materials 0.000 description 1
- 210000001944 turbinate Anatomy 0.000 description 1
- 210000005166 vasculature Anatomy 0.000 description 1
- 208000029761 vertebral disease Diseases 0.000 description 1
- 230000003612 virological effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
- 230000004580 weight loss Effects 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images
























































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1482—Probes or electrodes therefor having a long rigid shaft for accessing the inner body transcutaneously in minimal invasive surgery, e.g. laparoscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/042—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating using additional gas becoming plasma
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1477—Needle-like probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00238—Type of minimally invasive operation
- A61B2017/00261—Discectomy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00005—Cooling or heating of the probe or tissue immediately surrounding the probe
- A61B2018/00011—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00005—Cooling or heating of the probe or tissue immediately surrounding the probe
- A61B2018/00011—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids
- A61B2018/00029—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids open
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00434—Neural system
- A61B2018/0044—Spinal cord
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00744—Fluid flow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1425—Needle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1472—Probes or electrodes therefor for use with liquid electrolyte, e.g. virtual electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2218/00—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2218/001—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body having means for irrigation and/or aspiration of substances to and/or from the surgical site
- A61B2218/002—Irrigation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2218/00—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2218/001—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body having means for irrigation and/or aspiration of substances to and/or from the surgical site
- A61B2218/007—Aspiration
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Otolaryngology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Plasma & Fusion (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Description
関連出願のクロスリファレンス
本発明は、2000年9月28日に出願された米国出願第09/676194号(代理人事件番号第S-9号)と2000年10月3日に出願された米国出願第09/679394号(代理人事件番号第S-9-2号)の一部係属出願であり、2000年8月9日に出願された米国仮出願第60/224107号からの優先権を主張しており、後者の出願は2000年5月17日に出願されたPCT国際公開第00/13706号( 代理人事件番号第S-5PCT号) の一部係属出願であり、これは1999年5月21日に出願された米国特許出願第09/316472号 (代理人事件番号第S-5号) からの優先権を主張しており、この出願は1999年4月21日に出願された米国特許出願第09/295687号(代理人事件番号第E-7-2号) と1998年4月2日と1998年3月15日に出願された米国特許出願第09/054323号及び第09/268616号(それぞれ代理人事件番号第E-5及びE-7号) の一部係属出願であり、そのそれぞれは1997年12月15日に出願された米国特許出願第08/990374号(代理人事件番号第E-3号) の一部係属出願であり、後者の出願は1995年6月7日に出願された米国特許出願第08/485219号(代理人事件番号第16238-000600号) の一部係属出願であり、その完全な開示はすべての目的のために引用によって本明細書中に組み込まれる。この出願は1999年2月20日に出願された米国特許出願第09/026851号(代理人事件番号第S-2号) の一部係属出願でもあり、後者の出願は1996年7月18日に出願された米国特許出願第08/690159号(代理人事件番号第16238-001610号) の一部係属出願でもあり、その完全な開示はすべての目的のために引用によって本明細書中に組み込まれる。
【0002】
本発明は、一般譲渡された係属中の1998年10月28日に出願された米国特許出願第09/181926号(代理人事件番号第S-1-2号) 、1998年8月7日に出願された米国特許出願第09/130804号(代理人事件番号第S-4号) 、1998年4月10日に出願された米国特許出願第09/058571号(代理人事件番号第CB-2号) 、1999年2月12日に出願された米国特許出願第09/248763号(代理人事件番号第CB-7号) 、1998年2月20日に出願された米国特許出願第09/026698号(代理人事件番号第S-3号) 、1998年5月6日に出願された米国特許出願第09/074020号(代理人事件番号第E-6号) 、1998年1月21日に出願された米国特許出願第09/010382号(代理人事件番号第A-6号) 、1998年2月27日に出願された米国特許出願第09/032375号(代理人事件番号第CB-3号) 、1997年11月25日に出願された米国特許出願第08/977845号(代理人事件番号第D-2号)、1997年10月2日に出願された米国特許出願第08/942580号(代理人事件番号第16238-001300号) 、1996年11月22日に出願された米国特許出願第08/753227号(代理人事件番号第16238-002200号) 、1996年7月18日に出願された米国特許出願第08/687792号(代理人事件番号第16238-001600号) 、及び1994年5月10日に出願されたPCT国際出願の米国国内段階第PCT/US94/05168号であって、現在米国特許第5697909号(代理人事件番号第16238-000440号) に関連し、この米国特許は1993年5月10日に出願された米国特許出願第08/059681号(代理人事件番号第16238-000420号) の一部係属出願であり、これは1992年10月9日に出願された米国特許出願第07/958977号(代理人事件番号第16238-000410号) の一部係属出願であり、これは1992年1月7日に出願された米国特許出願第07/817575号(代理人事件番号第16238-00040号) の一部係属出願であり、これらの完全な開示はすべての目的のために引用によって本明細書中に組み込まれる。本発明は一般に譲渡された1995年11月22日に出願された米国特許第5697882号(代理人事件番号第16238-000700号) にも関連し、この完全な開示はすべての目的のために引用によって本明細書中に組み込まれる。
【0003】
発明の背景
本発明は、装置の末端が導入装置に接触することを避けるように湾曲した末端形状を有する医療装置に関する。本発明は電気外科の分野、詳しくは高周波の電気エネルギを使用して脊椎領域の組織を治療する外科装置及び方法にも関する。本発明は、特に脊椎の内部の、椎間板、軟骨、靱帯、及びその他組織の治療に適している。
【0004】
しつこくて身体機能を不能にすることもある背中の痛みの主たる原因は、椎間板繊維輪の断裂、椎間板の慢性的炎症(例えばヘルニア)、或いは所与の椎間板を取り囲む椎骨本体の相対的不安定性であり、前記椎骨本体の相対的不安定性は、例えば椎骨を取り囲む棘突間組織の伸長に起因して起こることの多い不安定性である。椎間板は主として椎骨を緩衝し且つ繋ぐ機能を有し、一方、棘突間組織(即ち、靱帯、腱、軟骨その他)は椎骨を支えて患者の脊椎に可撓性と安定性を与える機能を有する。
【0005】
椎間板は、中心の親水性クッション、多層の繊維質の靱帯で取り囲まれた核髄及び繊維輪で構成されている。椎間板が劣化するにつれて、それに含まれている水分が失われてその高さが減り、隣合う椎骨同士の間を接近させる。これによって、椎間板の衝撃吸収性が悪化し、且つ神経を挟む脊椎の側面の神経開口(孔)が狭くなってしまう。この椎間板の変質によって背中と足に苦痛を与えることがある。劣化した椎間板或いは椎間板の障害に由来して繊維輪が弱くなり、椎間板の内部から核髄の破片を繊維輪を通じて脊椎の管内に移動させる。変位した核髄や繊維輪の突起、例えばヘルニアは、脊椎の神経根に接触する。繊維輪の弱化によって椎間板は膨らみ、内包的ヘルニアを形成し、核髄や損傷した繊維輪が神経に近づくだけで神経に対して直接的な圧力を与え、痛み、及び感覚と運動性との欠如を生じる。
【0006】
椎間板ヘルニアに起因する炎症は、安静、治療体操、経口的抗炎症投薬或いはコルチコステロイドの硬膜外注射等の非外科的手段によってうまく治療されることが多い。これらの治療は緩慢ではあるが確実な症状の改善をもたらし、患者は外科的処置を受けなくてすむ。
【0007】
或る場合には、椎間板の組織は修復できないほどの損傷を受け、したがって椎間板の一部或いは椎間板全体を取り除いて、炎症と圧力の源を解消する必要がある。更に厳しい場合には、隣接する椎骨本体を安定化した後に、椎間板物質を切除して障害のある背中の痛みの再発を防ぐ必要がある。脊椎固定術と称する椎骨を安定化する一方法は、体内移植片を変質した椎間板が取り除かれた空間に挿入或いは移植することである。この処置において、少量の骨がインプラントに移植され、充填されることもある。これによって、骨はインプラントを貫通して周囲に成長し、椎骨本体を融合して症状の再発を防止することができる。
【0008】
最近まで、外科的脊椎処置は大きな手術であり、筋肉と骨の除去或いは骨の融合といった外傷性切開をもたらしていた。伝統的な外傷性脊椎手術の欠点を克服するために、最小の侵襲的脊椎手術が開発された。内視鏡的脊椎処置においては、脊柱管は乱されず、したがって、瘢痕を残す硬膜出血が少なくなり、或いは完全に回避される。それに加えて、靱帯と骨の除去に起因する不安定性のリスクは、一般的に開放処置の場合よりも内視鏡処置では一般に低い。更に、迅速なリハビリテーションによって回復が促進され、仕事への復帰が早くなる。
【0009】
脊椎の病気や不整の治療のための最小の侵襲的技術は、化学的髄核分解、レーザー技術及び機械的技術を含んでいる。これらの処置は、患者の外表面から椎間板まで手術用器具及びインプラント等のための通路或いは手術用回廊を形成するのに一般的に外科医を必要とする。典型的には、この手術用回廊を形成するには、処置(即ち腹腔鏡的、胸腔鏡的、関節鏡的、背中等)に応じて柔らかい組織、筋肉その他のタイプの組織の除去が必要である。この組織は、通常、下垂体咬鉗子、掻爬器、把持器、カッター、ドリル、微小破片切除器等の機械的器具によって除去される。不幸にして、これらの機械的器具は、処置の複雑性を非常に拡張して増加させる。それに加えて、これらの器具はこの組織の内部の血管を切断し、通常は多量の出血をもたらし、外科医が目標箇所を見ることを妨げる。
【0010】
手術用回廊が確立されると、神経根が引っ込められ、椎間板の一部或いは全部が下垂体咬鉗子等の機械的器具によって取り除かれる。これらの器具は精密ではなく、処置の際に目標とする椎間板組織と骨、軟骨、靱帯、神経及び非目標組織等の脊柱内のその他の構造との区別を難しくすることが多いので、機械的器具に伴う上述の問題に加えて、深刻な懸念がある。したがって、外科医は、脊椎内の軟骨と骨に対する損傷を最小にして、脊椎神経と脊髄を取り巻く硬膜等の神経の損傷を避けるのに非常に注意する必要がある。
【0011】
初めは、レーザーは熱によって組織を切断或いは蒸発させ、組織の小血管を焼灼して密閉するので、脊椎手術には理想的なものであると考えられていた。不幸にして、レーザーは高価であると共に、これらの処置で使用するのには幾分冗漫である。レーザーの不利益は、不幸にして組織切除の深さの決定が難しいことにある。外科医は一般的に組織に接することなく組織を指して照射するので、外科医は、レーザーがどのくらい深く切断しているかを判断するための触感のフィードバックを受けない。健康な組織、骨、靱帯及び脊椎神経は脊椎の椎間板の近くに存在しているので、最小の組織損傷深さを維持することが肝要であるが、レーザーではこれは常には保証されない。
【0012】
単極及び双極型高周波装置は、切断された血管を焼灼して可視状態を改善する等、脊椎手術の限定された役割の中で使用されている。しかし、単極型装置は、患者の身体に規定されない経路を通じて電流が流れる欠点を有し、それによって望ましくない電気刺激を患者の身体の一部に与えるリスクが増加する。それに加えて、(患者の身体の大きな距離或いは抵抗性のために)患者の身体を通って形成された経路が比較的高いインピーダンスを有するので、目標組織の切除や切断に適した電流を発生させるには大きな電圧差が復帰電極と能動電極との間に印加される必要がある。しかし、この電流は、形成された電気経路よりも小さいインピーダンスを有する身体経路に沿って偶発的に流れる場合があり、これらの経路を通じて流れる電流を実質的に増加させ、周囲の組織や近傍の周辺神経を損傷或いは破壊することがある。
【0013】
従来のRF装置、特に単極装置の他の欠点は、神経刺激、及び手術室内の神経モニタリング装置との干渉である。これに加えて、これらの装置は、能動電極と目標組織との間に電圧差を発生させて、電極と組織の間の物理的間隙を横断して電弧を生じさせることによって作動させることが多い。電弧と組織との接触点において、電極と組織との間の高い電流密度に起因して、組織の急速な加熱が引き起こされる。この高い電流密度によって細胞液が急速に蒸発して蒸気となり、それによって局部的な組織の加熱経路に沿って「切断効果」が得られる。したがって、組織は蒸発した細胞液の通路に沿って分断され、目標組織箇所を取り巻く領域における望ましくない副行組織損傷を引き起こす。この副行組織損傷は組織の無差別の破壊を生じることが多く、組織の正当な機能が失われる。更に、この装置は直接には組織を取り除くのではなく、組織の領域の破壊に応じて、結局は人体に破壊された組織を除去させる。
【0014】
多くの患者は、椎間板の欠陥や不整に起因する椎間板に由来する痛みを経験する。この椎間板の欠陥には、繊維輪の裂け目、核髄の破片及び内包的ヘルニアが含まれる。種々の椎間板不整に関連する痛みに共通の原因は、椎間板による神経根の圧迫である。大きな脊椎手術が必要とされない多くの患者においては、椎間板起因の痛みは、長期間例えば数カ月にわたる激しさが自然に消失する。脊椎神経根の圧迫に関連する慢性の衰弱的な痛みを軽減させるためにこの患者の治療用に構成された電気外科装置が必要である。本発明は、比較的低温で椎間板組織を切除することによって神経根の圧迫を解消する装置を提供するものてあって、椎間板に一つ以上のチャンネルが形成され、椎間板の容積が減少し、椎間板起因の痛みが軽減される。
【0015】
一つ以上の鋭敏な或いは脆弱な部品を有する医療機器が導入装置の中空部から前進しそしてその中に後退することができ、一方、前記鋭敏或いは脆弱な部品と導入装置との間の接触を回避する装置も必要である。本発明は、以下に詳細に述べられるこのような装置を提供する。
【0016】
発明の概要
本発明は、椎間板等の患者の身体の内部構造に電気エネルギを選択的に付与するシステム、方法、及び装置を提供するものである。本発明のこの装置と方法は、開放型の内視鏡式脊椎外科において、組織その他の人体構造の収縮、切除、切断、吸引及び/又は止血のために有用である。特に、本発明は、椎間板を減量、切除、収縮させるための方法と装置を含む。
【0017】
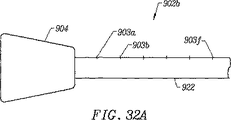
本発明は、更に、シャフト末端部分に第一湾曲部及び第二湾曲部を有する細長いシャフトを含んだ電気外科用プローブに関し、ここでシャフトは椎間板内で回転して核髄の新たな組織に接触することができる。本発明は、細長いシャフトを含んだ電気外科用プローブにも関し、ここでシャフト末端は椎間板内部の特定の目標箇所まで案内されることができ、シャフト末端は目標とする椎間板組織を局部的に切除するように構成されている。本発明は、更に、細長いシャフトを有するプローブに関連し、このシャフトは能動電極、絶縁カラー、外側シールドを包含し、前記能動電極は、先端スパイクと尖頭とを有するヘッドを包含している。本発明は、更に電気外科用プローブによる椎間板の組織を切除するための方法にも関連し、このプローブは細長いシャフトを包含し、シャフト先端は椎間板の内部の特定目標箇所まで案内される。
【0018】
例示的な一態様においては、本発明はヘルニアになった椎間板を治療する方法を提供する。この方法は、椎間板内の少なくとも一つの能動電極を位置決めすることを含む。高周波電圧が能動電極と一つ以上の復帰電極との間に印加され、核髄及び/又は繊維輪の少なくとも一部を減量、切除、凝固及び/又は収縮させる。高周波電圧は制御された加熱深さをもたらし、核髄の含水量を減らし、それによって核髄を減量し、繊維輪の内圧を減少させる。
【0019】
一実施形態においては、等張塩水或いは導電性ゲル等の導電性媒体が、高周波エネルギの供給に先立って椎間板の内部の目標箇所に供給される。この導電性媒体は、能動電極が処置全体を通じて浸漬されるように目標領域全体を充填する。他の実施形態においては、患者の椎間板における細胞外部の導電性流体(例えば核髄)は、目標箇所に付与或いは供給される導電性媒体の代わりとして、或いはこれに加えて使用される。例えば、幾つかの実施形態においては、導電性媒体の初期量が供給されて、切除のための必要条件が先導される。先導された後、患者の組織に存在する導電性流体がこれらの条件を維持するのに使用される。
【0020】
もう一つの態様においては、本発明は内包的ヘルニア或いは裂け目を有する椎間板を治療する方法を提供する。この方法は、患者の椎間板に電気外科器具を経皮的に或いは開放的処置のいずれかによって導入することを含む。この器具は内包的ヘルニア或いは裂け目に近傍まで操向されて案内され、高周波電圧が、能動電極と復帰電極との間に印加され、内包的ヘルニア或いは裂け目に隣接する核髄を減量する。幾つかの実施形態においては、高周波電圧を印加する前に椎間板内に導電性流体が供給され、プラズマ形成のために十分な導電性流体が存在することを保証し、能動電極と復帰電極との間に電流を流すようにしている。別の例では、導電性流体はこの処置の際に目標箇所に供給される。導電性流体を介して供給された熱は、核髄を減量させ、繊維輪に加わる圧力を減少させ、影響を受けている神経根に加わる圧力を減らし、頸部と背部の痛みを軽減する。
【0021】
もう一つの態様においては、本発明は変性した椎間板を治療する方法を提供する。能動電極は切除モードにおいて目標の椎間板組織内に前進させられ、ここで高周波電圧は分子解離或いは崩壊プロセスを通じて核髄を切除或いは除去するのに充分なものである。これらの実施形態においては、能動電極に印加される高周波電圧は導電性流体(例えばゲル、塩水及び/又は細胞内流体)及び組織を蒸発させるのに充分なものである。蒸発した流体の中ではイオン化されたプラズマが形成され、荷電粒子(例えば電子)が核髄の数枚の細胞層を分子的に破壊或いは崩壊させる。この分子解離は組織の容積的除去に伴うものである。このプロセスは精密に制御されて、周囲の或いは下方の組織構造に対する加熱や損傷を最小にして、10〜150ミクロンの薄さまで組織を容積的に除去することによって行われる。更に完全なこの現象の説明は、一般譲渡された米国特許第5697882号に述べられており、その完全な開示は引用によって本明細書中に組み込まれる。
【0022】
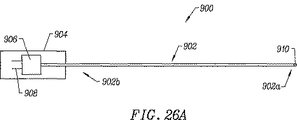
本発明による装置は、一般的に基端部分と末端部分とを有するシャフトと、その末端の能動電極と、能動電極を高周波エネルギ源に接続する一つ以上のコネクタとを含んでいる。プローブ或いはカテーテルは種々の形状をとることができ、その主目的は、(開放的或いは内視鏡的処置において)電極アセンブリを患者の椎間板に導入し、治療に当たる医師がシャフト基端から電極アセンブリを操作できるようにすることにある。治療に当たる医師が能動電極をヘルニアの近傍に移動させることを可能にするように、プローブのシャフトは、可撓性で湾曲し、操向可能である。この電極アセンブリは、一つ以上の能動電極と該能動電極から隔たった復帰電極とを含み、これらは器具のシャフト上或いは器具のシャフトとは別に設けられている。
【0023】
能動電極は単一の能動電極、或いはセラミック、シリコーン、ガラス等の無機物質で作られた電気絶縁性支持部材から延びる電極列を具えている。能動電極は、通常、復帰電極よりも小さい露出表面を有し、能動電極における電流密度が復帰電極におけるよりもはるかに高くなっている。好ましくは、復帰電極は、器具のシャフトを取り巻いて延在する比較的大きい滑らかな表面を有して電流密度を低下させ、それによって隣接する組織に対する損傷を最小にできる。
【0024】
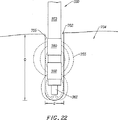
本発明のもう一つの態様においては、シャフト末端部分、第1湾曲部、及び該第1湾曲部に接近した第2湾曲部を含んだ医療装置が提供され、ここで、第1湾曲部は第1方向を向き、第2湾曲部は前記第1方向と反対の方向を向いている。一実施形態において、この医療装置は、更に、シャフト末端部分を通すように構成された中空部を有する導入装置を含んでいる。本発明の一態様においては、シャフト末端部分が中空部を通過し、導入装置の末端から前進しそしてそこから後退するとき、シャフト末端部分の先端或いは末端は中空部の内部のほぼ中心に位置決めされた状態を維持する。中空部内のシャフト先端の横方向の位置は、第1湾曲部の角度と該第1湾曲部の末端側の長さとによって決められる。第2湾曲部の角度は、シャフトが導入装置から自由になっている場合のシャフト先端がシャフトの長手方向軸から離れる偏りの角度を決める。
【0025】
本発明のもう一つの実施態様では、電気外科を行う装置は、一般にシャフト末端部分、シャフト基端部分、及びシャフト末端部分に配設された少なくとも一つの能動電極を含んだシャフトを有し、ここで、シャフト末端部分は前記少なくとも一つの能動電極の基端側の方に湾曲部を有している。一実施形態においては、このシャフトの湾曲部は第1湾曲部とこの第1湾曲部の基端側の第2湾曲部とを含んでいる。この第1湾曲部と第2湾曲部はシャフトの長手方向軸に関する同一平面内にあることが好ましく、第1湾曲部と第2湾曲部はシャフトの長手方向軸に関して異なる方向を向いている。一実施形態においては、第2湾曲部の角度は第1湾曲部の角度よりも大きい。もう一つの実施形態においては、シャフトは組織の切除に適するようになっており、このシャフトは、製造時に装置において規定された特定の曲率を有し、この特定の曲率は使用時に、即ち装置による組織の切除の際に実質的に保持されている。もう一つの実施形態においては、前記少なくとも一つの能動電極は、頂点スパイクとほぼ赤道の尖頭とを含んでいる。前記少なくも一つの能動電極は、導電性流体の存在と印加される高周波電圧とによって高い電流密度を持ってプラズマを好ましく発生させる。
【0026】
もう一つの実施形態においては、シャフトは電極ヘッドに接続されたフィラメントと、該フィラメント上の第1絶縁スリーブと、該第1スリーブ上のほぼ円筒状の復帰電極と、該復帰電極上の第2絶縁スリーブと、該第2スリーブ上のシールドとを包含している。第1スリーブはその末端に、好ましくはガラス、セラミック、シリコーンゴムで構成された絶縁カラーを有している。シャフトは、末端追跡装置、一つ以上の深さマーク、及びほぼ基端にある機械的ストッパ、の一つ以上をさらに含んでいる。
【0027】
もう一つの実施形態では、本発明は、椎間板を治療するための電気外科用プローブと導入針との組合せ体を提供し、この組合せ体は、シャフト末端、少なくとも一つの能動電極、及び少なくとも一つの復帰電極を有するシャフトを含んだプローブを包含している。一実施形態においては、シャフト末端は、更に第1湾曲部とこの第1湾曲部の基端側の第2湾曲部とを含んでいる。この組合せ体は、更に中空部と針末端とを有する導入針を含んでいる。導入針は、シャフト末端が中空部を通過して、針末端を遠位側に越えて案内されるのに適するようにされている。したがって、シャフト末端は椎間板の方に案内されてその中に入る。この組合せ体の電気外科用プローブは、一般的に、前述のこれらのエレメントと特長とを包含しており、そして頂点スパイク、絶縁カラー、及びシールドを有する電極ヘッドを含んでいる。導入針の中空部は、シャフト末端の直径の約105〜約500%の範囲の直径を有することが好ましい。
【0028】
もう一つの態様では、本発明は電気外科用装置を製造する方法を提供し、この方法は少なくとも一つの湾曲部を有するシャフトを準備する段階、ハンドルを準備する段階、そしてハンドルを湾曲したシャフトに固定する段階を含んでいる。一実施形態では、装置の製造に使用するためのシャフトの準備段階は、フィラメントとスパイク付きヘッドを有する能動電極を準備する段階と、少なくとも一つの第1絶縁スリーブ、復帰電極、第2絶縁スリーブ、及びシールド内にフィラメントを順次包み込む段階とを含んでいる。一実施形態では、この方法は第1湾曲部と第2湾曲部とをシャフトに形成する段階を含み、第2湾曲部の導入に先立って第1湾曲部が導入される。
【0029】
本発明の性質と利点を更に理解するために、添付図面を参照して述べる次の説明を参照するべきである。
【0030】
特有の実施形態の説明
本発明は、特に、脊柱の支持組織または他の本体構造を含む患者の身体の内部又は表面の目標位置に電気エネルギを選択的に付与する装置と方法を提供するものである。これらの処置には、棘突間組織や変質した椎間板の治療、ヘルニアになった椎間板の治療のための椎弓切除術/椎間板切除術、腰仙と頸椎の狭窄のための減圧椎弓切除術、繊維輪の局部的な裂け目や割れ目、核髄切除、椎間板融合操作、中央脊椎関節突起切除、背部腰仙椎及び頸椎固定術、椎骨の病気に関連する脊柱側湾症の治療、椎骨間の孔の蓋を除去して孔を拡大し、神経根の圧迫を解放する椎間孔天蓋切除術、及び前頸椎・腰椎切除術を含んでいる。これらの処置は、開放処置によって行われるか、或いは胸腔鏡検査、関節鏡検査、腹腔鏡検査等のような最小の切開技術を介して行われる。
【0031】
本発明は、高周波エネルギによって椎間板の異常を治療する技術を含んでいる。幾つかの実施形態においては、高周波エネルギは、椎間板の組織構造を切除し、小さくし、及び/又は丈夫にして、椎間板の容積を減少させ、それによって頸と背中の痛みを和らげるのに使用される。本発明の一態様においては、脊柱の椎間板組織は容積的に除去或いは切除されてこの椎間板内に孔、チャンネル、ディボット等その他の空間を形成している。この処置においては、高周波電位差が一つ以上の能動電極及び一つ以上の復帰電極に印加されて、目標とする組織の近傍に高い電場強度を発達させる。能動電極に隣接するこの高い電場強度は、(熱による蒸発や炭化でなくて)分子解離を介して電場に誘導された目標組織の分子分解を起こさせる。本出願人は、より大きな有機分子の分子崩壊を通じて、組織構造が水素、酸素、炭素酸化物、炭化水素及び窒素化合物等の小さな分子及び/又は原子になって容積的に除去されるものと信じている。この分子崩壊は、大きな有機分子を完全に除去し、これは、電気外科的乾燥及び蒸発によくあるような、組織の細胞内の液体及び細胞外の流体を除去することによって組織の物質を脱水するのとは異なる。
【0032】
本発明は、棘突間組織(例えば、腱、軟骨、椎骨同士の間の滑膜組織、その他の脊柱の内部及び周囲の支持組織)を治療する装置と方法も含んでいる。或る実施形態においては、棘突間組織を加熱して収縮させるのに高周波エネルギが使用され、脊柱を安定化させ、背中と頸部の痛みを減少させる。本発明の一実施態様においては、能動電極が棘突間組織に隣接して位置決めされ、棘突間組織は好ましくは高周波エネルギによって棘突間組織を収縮させるのに充分な温度まで加熱される。特定の実施形態においては、高周波電位差が一つ以上の能動電極と一つ以上の復帰電極との間に印加されて、目標とする組織の近傍に高い電場強度を発達させ、目標組織を制御可能に加熱する。
【0033】
この高い電場強度は、高周波電圧を印加することによって発生させられ、前記高周波電圧は、能動電極の先端と目標組織との間の領域において能動電極の少なくとも一部の上の導電性流体を蒸発させるのに充分なものである。この導電性流体は、等張塩水、血液、若しくは目標に供給されるか或いは既に存在している細胞外又は細胞内流体等の液体或いは気体、又は目標箇所に付与されたゲル等の粘稠性流体である。蒸気層或いは蒸発領域は比較的高いインピーダンスを持っているので、これは導電性流体に流れる電流を最小限に抑える。ここに述べられた条件下におけるこのイオン化は、エネルギを有する電子と光子の、蒸気層からの放出と目標組織の表面への放出とを誘導する。 Coblation(登録商標)と称されるこの現象の更に詳細な説明は、一般承継された米国特許第5697882号に見出すことができる。なお前記特許の完全な開示は、引用によって本明細書中に組み込まれる。
【0034】
本出願人は、本発明の Coblation(登録商標)メカニズムにおける組織除去の原理メカニズムは、能動電極に隣接するプラズマ内でエネルギを与えられた高エネルギの電子やイオンであると信じている。液体が充分に加熱されて、原子が再凝縮するよりも速く表面から蒸発する場合には、気体が形成される。この気体が充分に加熱されて原子同士が互いに衝突し、このプロセスにおいてその電子を叩き出す場合には、イオン化された気体やプラズマが形成される(いわゆる「物質の第4の状態」)。プラズマの更に完全な説明はプリンストン大学のプラズマ物理研究所のR.J. Goldston 及びP.H. Rutherford による Plasma Physics (1995)に見出すことができ、これの完全な開示は引用によって本明細書中に組み込まれる。蒸気層(又は導電性液体中に形成された泡の内部)の密度が充分に低い(即ち、水溶液に対して約1020 atoms/cm3 未満) 場合、電子の平均自由行程が増大して順次に射出される電子を低密度のこれらの領域(即ち蒸気層又は泡)内で衝撃イオン化させることを可能にする。プラズマ層内のイオン粒子が充分なエネルギを有すると、これらのイオン粒子は目標の組織に向かって加速される。高エネルギの電子(例えば3.5eV〜5eV) によって発展させられたエネルギは、引き続いて分子に衝撃を与え、その結合を破壊し、分子を遊離基に解離し、次いでこれらを最終的な気体又は液体の化学種に組み入れる。
【0035】
プラズマは、気体を加熱することによって、或いはこの気体に電流を通してイオン化することによって、或いはこの気体に電波を照射することによって形成される。一般的に、プラズマを形成するこれらの方法は、プラズマの自由電子にエネルギを直接に付与し、次いで電子と原子の衝突によって更に多くの電子を自由にし、そしてこのプロセスは所望のイオン化度が達成されるまで繰り返される。多くの場合、電子は電流を運び、電波を吸収し、したがってイオンよりも高温になっている。即ち、出願人の発明においては、組織から復帰電極の方に運び去られる電子は、それらと共に大部分のプラズマの熱を運び、イオンがほぼ非加熱方式で組織分子を解離させることを可能にする。
【0036】
幾つかの実施形態においては、本発明は導電性媒体環境に高周波(RF)電気エネルギを付与して、組織構造を収縮或いは除去(即ち、切除、切断または切除)し、そして目標組織の領域内の切開された血管を密閉する。本発明は、大きな動脈、例えば直径約1mmオーダーの血管を密閉するのに有用である。幾つかの実施形態においては、切除モードと凝固モードとを有する高周波電力供給ユニットが設けられ、切除モードでは組織の分子解離或いは分解をもたらすに充分な第1電圧が能動電極に印加され、凝固モードでは組織内の切断された血管を加熱、収縮及び/又は止血するのに充分な第2のより低い電圧が能動電極(同一の或いは異なる電極)に印加される。他の実施形態においては、一つ以上の凝固電極と、一つ以上の能動電極とを有する電気外科用器具が設けられていて、前記一つ以上の凝固電極は、動脈等の切断された血管を密閉するように構成されたものであり、前記一つ以上の能動電極は、例えば分子解離を起こさせるのに充分なエネルギを組織に付与することによって、組織内のコラーゲン繊維を収縮させるか、或いは組織を除去(切除)するように構成されたものである。後者の実施形態においては、凝固電極は、凝固電極によって凝固させ、能動電極によって切除或いは収縮させるために単一の電圧が印加可能であるように構成されている。他の実施形態においては、電源装置が凝固器具と組み合わされて、電源装置が凝固モードにある時に(低電圧)凝固電極が使用され、電源装置が切除モードにある時に(高電圧)能動電極が使用されるようになっている。
【0037】
本発明の一方法においては、一つ以上の能動電極が目標箇所における組織の近傍に運ばれ、電源装置が切除モードで作動して、能動電極と復帰電極との間に充分な電圧が印加されて分子の解離によって後述するように組織が容積的に除去される。このプロセスの際に、組織内の血管は切断される。小さな血管は本発明の装置と方法によって自動的に密閉されるであろう。動脈等の大きい血管及び大流量を有する血管は切除モードにおいて自動的に密閉されない。この場合、切断された血管は、制御器具(例えばフットペダル)を作動させて電源装置の電圧を凝固モードへ低下させることによって密閉される。このモードでは、能動電極が切断血管に対して押し付けられ、血管の密閉及び/又は凝固を提供する。代わりに、同一の或いは異なる器具に設けられた凝固電極が切断された血管に対して押し付けられてもよい。血管が適切に密閉されると、外科医は制御器具(例えばもう一つのフットペダル)を作動させて、電源装置の電圧を増加させ切除モードに戻す。
【0038】
もう一つの態様においては、本発明は椎間板内の脊柱又は接続組織を支持するコラーゲン接続組織を収縮させるのに使用される。これらの処置では、RFエネルギは、組織を流れる電流によって直接に、及び/又は組織の外側を通じてRFエネルギによって加熱される流体によって間接的に組織を加熱し、正常な体温(例えば37℃)から45〜90℃の範囲の温度、好ましくは約60〜70℃の範囲の温度まで組織温度を上昇させる。コラーゲン繊維の熱収縮は狭い温度範囲内で起こり、哺乳類のコラーゲンに対しては60〜70℃の範囲の狭い温度範囲内である(Deak,G.,他、「The Thermal Shrinkage Process of Collagen Fibers as Revealed by Polarization Optical Analysis of Topooptical Staining Reactions」,Acta Morphological Acad. Sci. of Hungary, Vol. 15(2),pp. 195-208, 1967)。コラーゲン繊維は典型的には60℃〜約70℃の範囲で熱収縮を受ける。以前に報告された研究は、コラーゲンの熱収縮をコラーゲンマトリックス内の内部安定架橋結合の裂け目が原因であるとしている(Deak, ibid) 。コラーゲンの温度が70℃を超えて上に上昇すると、コラーゲンマトリックスは再び弛緩を始め、この収縮効果は逆転して実質的な収縮が無くなってしまう(Allain, J. C. 他, 「Isometric Tensions Developed During the Hydrothermal Swelling of Rat Skin 」.Connective Tissue Research, Vol. 7, pp 127-133, 1980)。この完全な開示は引用によって本明細書に組み込まれる。従って、組織の精密な深さまでの制御された加熱が、治療のためのコラーゲンの収縮を得るのに重要である。コラーゲンの収縮の更に詳細な説明は、1997年10月2日に出願された米国特許出願第 08/942580号(代理人の事件番号第16238-001300号) に見出すことができ、その完全な開示は引用によって本明細書に組み込まれる。
【0039】
加熱領域(即ち、組織が60℃〜70℃の間の温度まで上昇させられる深さ)でコラーゲンを収縮させる好ましい加熱深さは、(1)一般的に目標組織の厚さ、(2)損傷温度に晒されてはならない近傍の構造(例えば神経)の位置、及び/又は(3)治療のための収縮が生じるコラーゲン組織層の位置、に応じて決まる。加熱深さは、通常、1.0〜5.0mmの範囲にある。本発明の幾つかの実施形態においては、組織は加熱モードにおいて意図的に損傷され、組織の表面に壊死或いは瘢痕のある組織がもたらされる。加熱モードにおける高周波電圧は前述の切除のしきい値より小さいが、電極の直ぐ周囲の組織にその場で蒸発や収縮を起こさせることなく、熱による幾らかの損傷を生じさせるのに充分なものである。典型的には、約0.2〜5mmの深さ、通常は約1〜2mmの深さまで、約60〜100℃の範囲の組織温度を得ることが望まれる。この熱損傷に必要な電圧は、一部には電極の形状、電極の直ぐ周囲の領域の導電性、電圧が印加される時間、及び所望の組織の損傷の深さに応じて決められる。本明細書に記載された電極形状(例えば図15A〜図15D)の場合、加熱のための電圧レベルは、通常、約20〜300ボルトrms の範囲、好ましくは約60〜200ボルトrms の範囲であろう。約2の波高率を有する加熱のための方形波形状のピークピーク電圧は、典型的には約40〜600ボルト波高値の範囲、好ましくは約120〜400ボルト波高値の範囲にある。幾つかの実施形態においては、コンデンサその他の電気エレメントは波高率を10まで増加させるのに使用されることがある。この範囲で電圧が高いほど、所要時間が短くなる。しかし、この電圧が高すぎると、表面組織が蒸発し、収縮し或いは除去され、これは好ましくない。
【0040】
更に他の実施形態においては、本発明は裂け目や破れ目を有する変質した椎間板を治療するために使用される。これらの実施形態においては、能動及び復帰電極が椎間板のリングの内壁に或いはその周囲に位置決めされ、能動電極が裂け目に隣接するようになっている。高周波電圧が能動及び復帰電極の間に印加され、裂け目を加熱してコラーゲン繊維を収縮させ、内壁の中を密閉或いは溶着し、これによってリングの裂け目を閉じることを助ける。これらの実施形態においては、復帰電極は器具のシャフト上の能動電極から基端側に位置決めされ、導電性流体が目標箇所に付与されて、能動及び復帰電極の間に必要な電流経路を形成する。別の実施形態においては、椎間板組織がこの導電性経路を完成する。
【0041】
本発明は、脊椎神経、末梢神経、或いは頭部神経等の神経の周囲の組織を除去或いは切除するのにも有用である。従来技術のシェーバーもしくは微小壊死組織除去装置、従来型電気外科用装置及びレーザーの重大な欠点の一つは、これらの装置が目標組織とその周囲の神経や骨とを識別しないことである。したがって、外科医はこれらの処置の際に非常に注意をして、目標箇所の中及び周囲の骨や神経に損傷を与えないようにする必要がある。本発明においては、前述のように、組織を除去するための Coblation(登録商標)プロセスが副行組織の損傷の深さを非常に小さくする。これによって、外科医は神経繊維に付随的な損傷を与えることなく、神経の近くの組織を除去することができる。
【0042】
本発明の新規なメカニズムの精密な性質に加えて、本出願人は、隣接する神経が組織除去の際に損傷されないことを保証する付加的な方法を見出した。本発明によれば、この処置の際に神経繊維を取り巻く脂肪組織と除去対象の通常組織とを識別する装置と方法が提供される。末梢神経は、通常、接続組織シース或いは神経繊維束を被覆する神経上膜を具え、各束はそれ自体の接続組織のシース(神経周膜)によって取り巻かれ、これらの神経繊維を保護している。外側保護組織シース即ち神経上膜は、例えば鼻腔の処置の際に鼻から除去される鼻甲介、ポリープ、粘液組織等の通常の目標組織とは実質的に異なる電気的特性を有する脂肪組織(例えば脂肪組織)を含んでいる。本発明のこの装置は、一つ以上の能動電極によってプローブの先端において組織の電気的特性を測定する。これらの電気的特性は、一つの或いは幾つかの或いは或る範囲の周波数(例えば1kHz 〜100MHz の範囲)、誘電率、静電容量、又はこれらの組み合わせにおいて導電性を包んでいる。この実施形態においては、プローブの先端の感知電極が神経を取り巻く脂肪組織を検出した場合には可聴信号が生成され、又はプローブの先端若しくは作業端に接する組織が、測定された電気的特性に基づく通常の組織である場合には、直接的なフィードバック制御が行なわれて、電力を個々の能動電極に或いは電極の全ての列のいずれかに供給するのみである。
【0043】
一実施例においては、電流制限エレメント(前に詳述した)は、電気インピーダンスがしきい値に達すると、能動電極がシャットダウンし又はスイッチオフとなるように作られている。このしきい値レベルが神経を取り巻く脂肪組織のインピーダンスに設定されると、能動電極はそれが神経に接触するか或いは接近するときはいつでもシャットオフする。その間、組織に接触し或いは接近する他の能動電極は復帰電極に電流を流し続ける。低インピーダンスの組織のこの選択的切除又は除去は、本発明の Coblation(登録商標)メカニズムと組み合わされて、外科医が神経や骨の周囲の組織を精密に取り除くことを可能にする。本発明は神経の機能を害することなく、そして神経上膜の組織を著しく損傷することなく、神経に隣接する組織を容積的に取り除くことを可能にすることを、本出願人は見出した。従来技術の微小壊死組織除去装置、電気外科用装置及びレーザーの重大な欠点は、これらの装置が目標組織と周囲の神経や骨との間の違いを識別しないことである。したがって、外科医はこれらの処置の際に鼻腔内の或いは鼻腔の周囲の骨や神経に対する損傷を防ぐのに非常に注意をしなければならない。本発明においては、組織の除去のための Coblation(登録商標)プロセスは、前述のように非常に小さい深さの副行組織の損傷しか生じない。これによって、外科医は、神経繊維への損傷を生じさせることなく神経の近くの組織を除去することができる。
【0044】
これに加えて、本出願人は、本発明の Coblation(登録商標)メカニズムは、他の組織構造に殆ど影響を及ぼすことなく、特定の組織構造を切除或いは除去するように操作可能なことを見出した。前述したように、本発明は導電性流体を蒸発させる技術を用いて、能動電極の周囲にプラズマ層やポケットを形成し、次にこのプラズマや蒸気層からエネルギの放出を誘導して組織構造の分子結合を破壊する。初期の実験に基づいて、本出願人はイオン化された蒸気層内の自由電子が電極の先端に形成された強い電場で加速されるものと信じている。蒸気層(或いは導電性液体に形成され泡内)の密度が充分に低い(即ち水溶液の場合には約1020atoms/cm3より低い)場合には、電子の平均自由行程は、増大して、引き続いて放出される電子が、これらの低密度領域(即ち蒸気層又は泡)内に衝撃イオン化を生じさせることを可能にする。エネルギを持った電子によって放出されたエネルギ(例えば4〜5eV)は引き続いて分子に衝撃を与えてその結合を破壊し、分子を遊離基に解離し、これは次いで組み合わさって最終的な気体又は液体になる。
【0045】
エネルギを有する電子によって放出されたエネルギは、能動電極の数、電極のサイズと間隔、電極の表面積、電極表面の粗さと鋭さ、電極の材料、印加電圧と電力、インダクタ等の電流制限手段、電極に接する流体の導電性、流体の密度、その他の種々の因子を調整することによって変えられる。したがって、これらの因子が操作されて励起された電子のエネルギレベルを制御することができる。異なる組織構造は異なる分子結合を持つので、本発明は、特定の組織の分子結合を破壊することができるように構成されることができるのと同時に、他の組織の分子結合を破壊するには低すぎるエネルギを有している。例えば、脂肪組織(例えば脂肪)は、破壊するのに4eV〜5eVより実質的に高いエネルギレベル(典型的には約8eVのオーダーの)を必要とする二重結合を有している。即ち、本発明は、その電流構成においてこのような脂肪組織を通常は切除又は除去しない。しかし、本発明は、細胞を効果的に切除して液状の内部脂肪成分を解放するのに使用される。勿論、因子を変更して(例えば電圧を増加させ或いは電極形状を変更して電極先端の電流密度を増大させて)、これらの二重結合が、一重結合と同じように破壊されることもできる。この現象の更に完全な説明は、1998年2月27日に出願された係属中の米国特許出願第 09/032375号 (代理人事件番号第 CB-3号) に見出すことができ、その完全な開示は引用によって本明細書中に組み込まれる。
【0046】
更に別の実施形態においては、本発明は、腫瘍からの生存細胞の拡がりを最小に抑えながら、腫瘍例えば顔面腫瘍その他の望ましくない身体構造を選択的に除去する装置、装置、及び方法を提供する。このような腫瘍を除去するための従来の技術は、一般的に外科的設定の際に電気外科的煙或いはレーザー煙と称される煙を発生し、これは、腫瘍や障害個所から、無傷の生存可能な細菌やウィルス性粒子を外科チームや患者の身体の他の部分に散布する。この生存可能細胞や粒子の可能性のある散布は、肝炎、ヘルペス、HIV、パピロマウィルス等の確実な衰弱と致命的疾病とに対する懸念を増大させる結果をもたらす。本発明においては、能動電極と一つ以上の復帰電極との間に高周波電圧を印加して、腫瘍の組織細胞の少なくとも一部を、有機分子の、生存不可能な原子と分子とへの解離もしくは分解によって容積的に除去する。特に、本発明は、固体の組織細胞を元のままではないもはや生存不可能な非凝縮性気体に変換し、したがって生存可能な腫瘍粒子を患者の脳の他の部分や外科スタッフに散布することはない。これらの組織細胞の制御された除去を、周囲や下方の組織への実質的な組織の壊死を最小限に抑えつつ実施するために、好ましい高周波電圧が選択される。この現象の更に完全な説明は、1998年6月30日に出願された係属中の米国特許出願第 09/109219号( 代理人の事件番号第 CB-1号) に見出すことができ、これの完全な開示は引用によって本明細書中に組み込まれる。
【0047】
電気外科用プローブ或いはカテーテルは、基端と末端とを有するシャフト或いはハンドピースを具えており、前記末端は一つ以上の能動電極を支持している。このシャフト或いはハンドピースは種々の形状をとることができ、その主たる目的は能動電極を機械的に支持し、治療医師が電極をシャフトの基端から操作することができるようにすることである。このシャフトは剛性を有していても或いは可撓性であってもよく、可撓性シャフトは概ね剛性を有する機械的支持用の外側チューブと組み合わされてもよい。可撓性シャフトは、牽引ワイヤ、形状記憶アクチュエータ、及びその他の、シャフト末端の選択的偏りを生じさせる公知の機構と組み合わされ、電極の列の位置決めを円滑化する。このシャフトは、通常、それを軸方向に貫通して挿入された複数のワイヤ、若しくはその他の導体エレメントを含んで、電極の列をシャフト基端のコネクタに接続している。
【0048】
脊椎内の内視鏡的処置のために、このシャフトは、外科医が、胸腔、腹腔等を通じてシャフトを供給することによって、目標個所(例えば椎間板)に到達することができる適切な直径と長さとを有する。かくして、このシャフトは、通常、約5.0〜30.0cmの範囲の長さと、約0.2〜約20mmの範囲の直径とを有している。別の例では、シャフトは患者の背中を通じて背後から直接的に供給され、シャフトの必要長さをかなり縮小可能である。これらのどの実施形態においても、シャフトは剛性或いは可撓性を有する内視鏡を介しても導入されることがある。別の例では、シャフトは、患者に経皮的に導入される可撓性を有するカテーテルであることもある。具体的なシャフトの構造は、添付図を参照しながら詳細に説明されるであろう。
【0049】
別の実施形態においては、プローブは、患者の背中を通じて脊椎に直接に経皮的に導入可能な長い、(例えば約1mmオーダー以下の直径の) 細い針を含んでいる。この針は脊椎内の組織に電気エネルギを付与するための一つ以上の能動電極を含んでいる。この針は一つ以上の復帰電極を含み、或いは復帰電極は分散型パッドとして患者の背中に位置決めされる。いずれの実施形態においても、充分な電気エネルギが針を通じて能動電極に付与され、椎間板内の組織を切除するため椎間板内のコラーゲン繊維を収縮させるか、又は椎骨を取り巻く支持繊維を収縮させる。
【0050】
電気外科用器具は、従来型の或いは特定のガイドカテーテルを通じて挿入されることによって患者の中に経皮的及び/又は内視鏡的に供給されるカテーテルでもあり、又は本発明は能動電極又は電極列を末端に有するカテーテルを含むこともある。このカテーテルのシャフトは剛性であっても、可撓性であってもよく、可撓性シャフトの場合には必要に応じて機械的支持のためのほぼ剛性の外側チューブと組み合わされる。可撓性シャフトは、シャフト末端を選択的に偏らす牽引ワイヤ、形状記憶アクチュエータ、及びその他の公知の機構と組み合わせられて、電極又は電極列の位置決めを円滑にする。カテーテルシャフトは、通常、これを貫通して軸方向に挿入された複数のワイヤその他の導体エレメントを具え、電極又は電極列と復帰電極とをカテーテルシャフト基端においてコネクタへ接続することを可能にする。カテーテルシャフトは、カテーテルを目標個所に案内するためのガイドワイヤを含んでいるか、又はカテーテルは、操向可能なガイドカテーテルを具えることがある。カテーテルは、カテーテルが更に患者の身体内に進入したときに、末端部分のトルク制御を強めるために、ほぼ剛性な末端部分も含んでいる。具体的なシャフトの構成が、添付図面とともに以下に詳細に説明されるであろう。
【0051】
能動電極は、器具シャフト末端の近傍に位置決めされた無機質絶縁サポートの内部で、或いは無機質絶縁サポートによって支持されることが好ましい。復帰電極は、器具シャフト、別の器具、或いは患者の外表面(即ち分散型パッド)に位置決めされることがある。しかし、脊髄の中や周囲の神経その他の感覚組織の近傍は双極型の構成が更に好ましく、これは非目標組織及び周囲の神経を通じて流れる電流を最小限に抑えることができるからである。即ち、復帰電極は器具本体或いはそれの近傍に位置決めされた別の器具と一体化されていることが好ましい。器具の基端は、復帰電極と能動電極とを電気外科用ジェネレータ等の高周波電源装置に接続する適切な電気接続装置を含んでいる。
【0052】
幾つかの実施形態において、能動電極は、電極の前縁に沿う電場強度とこれに関連する電流密度を増進するような表面形状を有する能動部分又は表面を有している。好ましい鋭い縁部を有する電極形状を生成することによって、又は電極の能動表面上の荒れその他の表面粗度を生成することによって、適宜な表面形状が得られる。本発明による電極形状は、正方形、長方形、L、V字型等の種々の断面形状を有する電極を形成するために、(例えば丸断面のワイヤを成形型を通して引き抜くことによって得られる)成形ワイヤの使用を含んでいる。電極の縁は細長い金属電極の一部を除去して断面を再成形することによっても形成される。例えば、材料を丸い或いは中空のワイヤ電極の長さに沿って研磨し、それぞれ縁が切削方向に面しているD又はC形状のワイヤを形成することができる。別のやり方では、材料は電極の長さに沿って狭い間隔で除去され、横方向の溝、スロット、すじ等が電極に沿って得られる。
【0053】
これに加えて、又はこれに代えて、能動電極表面は化学的方法、電気化学的方法、或いは研削方法を通じて変化させられ、電極表面に種々の表面荒れを生成することがある。これらの表面荒れは能動電極表面と目標組織との間に高い電場強度を増進し、組織の切除や切断を促進する。例えば、表面荒れは7.0未満のpHを有する腐蝕剤による能動電極のエッチングにより、或いは研磨粒子(例えばグリットブラスト仕上げ)の高速流を使用することによって形成され、細長い電極の表面に荒れを作り出す。このような電極形状の更に詳しい説明は、米国特許第5843019号に見出されることができ、その完全な開示は引用によって本明細書中に組み込まれる。
【0054】
復帰電極は、導電性流体の存在下で能動電極と復帰電極との間の電気短絡を防ぐように、典型的には能動電極から基端側へ適宜な距離だけ隔たった位置に設けられている。ここに述べられた多くの実施形態において、復帰電極の露出表面の末端縁は能動電極の露出表面の基端縁から約0.5〜25mm、好ましくは約1.0〜5.0mm隔たっている。勿論、この距離は異なる電圧範囲、及び導電性流体によって変化し、そして能動・復帰電極に対する組織の距離に応じて変化する。復帰電極は典型的には約1〜20mmの範囲の露出長さを有している。
【0055】
能動電極と復帰電極との間の電流経路は、導電性流体(例えば導電性ゲル等の粘稠導電性流体)の中に組織個所を沈めることによって、或いは導電性流体(即ち、等張塩水、低張塩水、又はアルゴン等の気体)を流体経路に沿って目標個所に向かわせることによって生じる。導電性流体の更にゆっくりとした更に制御された供給速度を得るために、導電性ゲルが目標個所に供給されることもある。これに加えて、ゲルの粘稠性によって、外科医は目標個所の周囲に(例えば等張塩水を含ませようと試みるよりも)更に容易にゲルを含ませることができる。能動電極と復帰電極との間に導電性流体を向かわせる典型的方法の更に完全な説明は、既に本明細書中に引用されている米国特許第 5697281号に記載されている。別の例としては、血液や細胞外塩類液等の人体の自然導電性流体が、復帰電極と能動電極との間に導電性経路を確立し、前述のように蒸気層を確立する条件を提供するのに充分である。しかし、患者に導入される導電性流体は、一般に血液よりも好ましく、なぜならば血液は特定の温度で凝固するからである。これに加えて、患者の血液は充分な導電性を持たず、幾つかの用途ではプラズマを形成するのに適していない。有利には、液状の導電性流体(例えば等張塩水)が目標組織の表面を同時に「浸漬」させるのに使用され、任意の組織を除去する補助手段を提供し、そして前の瞬間に切除された目標組織の領域を冷却する。
【0056】
電力供給ユニット或いはジェネレータは、能動電極の周囲に導電性流体が不充分な場合には、能動電極への電力の供給を中断する流体インターロックを含んでいる。これによって、導電性流体が存在していない場合には、器具は作動せず、そうでない場合に起こるであろう組織の損傷を最小限にする。このような流体インターロックの更に完全な説明は、1998年4月10日に出願されて一般譲渡された係属中の米国出願第 09/058336号 (代理人事件番号第 CB-4号) に見出すことができ、その完全な開示は引用によって本明細書中に組み込まれる。
【0057】
幾つかの処置においては、導電性流体及び/又は切除した非凝縮性気体生成物を回収し或いは吸い出すことも必要である。これに加えて、高周波エネルギによって完全には分解されない組織の小片若しくはその他の人体構造の小片、又は目標個所の他の流体、例えば血液、粘液、切除による気体状生成物を吸い出すことが望ましい。即ち、本発明の装置は、器具の中に又は別の器具に一つ以上の吸引中空部を含んでおり、前記吸引中空部は目標個所から流体を吸い出すための適宜な真空源に接続されている。これに加えて、本発明は、中空部内に吸い出された非切除組織の破片の体積を除去し、或いは少なくとも減少させるために、吸引中空部の末端に接続された一つ以上の吸い出し電極を含んでいる。吸い出し電極の主たる機能は、大きな組織破片が引き込まれた際に生じる中空部の詰まりを防止することにある。この吸い出し電極は切除用能動電極とは別個であってもよいし、或いは同じ電極が二つの機能を果たしてもよい。吸い出し電極を組み込んだ器具の更に完全な説明は、1998年1月21日に出願されて一般譲渡された係属中の米国特許出願第 09/010382号に見出すことができ、その完全な開示は引用によって本明細書中に組み込まれる。
【0058】
吸引に代えて或いはこれに加えて、目標個所或いはその近傍で、バスケット、若しくは後退可能なシース等の容器によって過剰な導電性流体、組織の破片及び/又は切除による気体性産出物を収容することが望ましい。この実施形態は、導電性流体、組織破片或いは切除物が患者の血管系を通じて人体の他の部分に流れ込まないようにする利点を有する。これに加えて、切断された血管の止血の際に、吸引量を制限して望ましくない吸引作用を制限することが好ましい。
【0059】
本発明は、カテーテルやプローブの末端表面の周囲に設けられた単一の能動電極或いは間隔を置いて設けられた能動電極の列を使用している。後者の実施形態では、電極列は、通常、それぞれ独立に電流が制限される及び/又は電力が制御される複数の能動電極を含んでおり、血液、正常な塩水等の周囲の導電性流体に対する電力の散逸の結果としての周囲の組織と環境への電気エネルギの望ましくない付与を制限しながら、電気エネルギを選択的に目標組織に付与する。能動電極は、端子を互いに分離して、各端子を他の能動電極から分離された別個の電力源に接続することによって独立して電流を制限する。別の例では、能動電極は、カテーテルの基端又は末端で互いに接続され、電力源につながる単一のワイヤを形成する。
【0060】
一形状において、電極列の各能動電極は、前記器具内の前記列の他のすべての能動電極から電気的に絶縁され、そして列内の他の能動電極のそれぞれから独立した電力源へ接続され、或いは低抵抗材料(例えば血液、導電性塩水洗滌液又は導電性ゲル等)が復帰電極と個々の能動電極との間の低イピーダンス経路を形成する場合に、能動電極への電流を制限或いは中断する回路へ接続されている。各能動電極用の独立した電力源は、低インピーダンスの復帰経路に出会った場合に関連する能動電極への電力を制限する内部インピーダンス特性を有する別個の電力供給回路である。一例として、この独立した電力源はユーザーが選択可能な定電流源であってよい。この実施形態においては、発熱は作動電流の二乗にインピーダンスを掛け合わせたものに比例するので、低インピーダンス経路は自動的に低抵抗加熱レベルになる。別の例では、一つの電力源が、独立して作動可能なスイッチを介して、或いはインダクタ、コンデンサ、抵抗器、及び/又はそれらの組み合わせ等の独立した電流制限エレメントによって各能動電極に接続されている。この電流制限エレメントは器具、コネクタ、ケーブル、コントローラに設けられるか、或いはコントローラから器具の末端への導電性経路に沿って設けられる。別の例では、抵抗及び/又は電気容量は、選択された能動電極(例えばプラチナのような金属の表面の抵抗性コーティング、もしくはチタン)を形成する酸化層に起因して、能動電極の表面に生じる。
【0061】
器具の先端領域は、先端近傍に電気エネルギを供給するように構成された多数の独立した能動電極を具えている。独立して制御されるチャンネル若しくは電流を制限されるチャンネルを有する電力源に各能動電極と復帰電極とを接続することによって、電気エネルギを導電性流体に選択的に付与することができる。復帰電極は、先端の電極列の基端側に導電性材料の単一のチューブ状部材を具えており、このチューブ状部材は能動及び復帰電極の間の導電性流体の供給のための導管としても役立つ。代わりに、器具が、該器具の先端に(能動電極と共に)復帰電極の列を具えて、先端に電流を維持することがある。復帰電極と電極列との間に高周波電圧を印加することによって、能動電極の末端に高い電場強度を発生させ、各能動電極から復帰電極へ高周波電流を伝える。各能動電極から復帰電極への電流は、能動或いは受動手段或いはそれらの組み合わせによって制御され、周囲の(非目標)組織へのエネルギ供給が最小限になるように、電気エネルギを周囲の導電性流体に供給する。
【0062】
高周波電圧を復帰電極と能動電極との間に適宜な時間印加することによって、目標組織の収縮、切断、除去、切除、成形、若しくは縮小等の修正が行なわれる。本発明の幾つかの実施形態においては、エネルギが上で放散される(即ち高い電流密度が存在している)組織の容積は、複数の小さな能動電極を使用することによって更に精密に制御され、前記小さな能動電極は、例えば、約10〜0.01mmの範囲の、好ましくは約2〜0.05mmの範囲、更に好ましくは約1〜0.1mmの範囲の有効直径或いは主な寸法のものである。この実施形態においては、円形或いは非円形端子の両方の場合の電極面積は、電極列に関しては50mm2 以下(一能動電極当たり)の接触面積であり、単一の電極の実施形態に関しては75mm2 程度の大きさの接触面積を有する。複数の電極列の実施形態において、各能動電極の接触面積は典型的には0.0001〜1mm2 の範囲にあり、更に好ましくは0.001〜0.5mm2 の範囲にある。電極列或いは一本の能動電極の外周面積は、0.25〜75mm2 の範囲にあり、好ましくは0.5〜40mm2 の範囲にある。複数の電極を有する実施形態において、この列は、通常、少なくとも二本の独立した能動電極、多くの場合は少なくとも五本の能動電極、更に多くの場合は十本以上の能動電極、及び更に五十本以上の能動電極を含み、シャフト末端接触表面に設けられる。小さい直径の能動電極を使用することによって電場強度を高めて、各能動電極の露出表面から放射される電流束ラインの拡散の結果としての組織加熱の範囲或いは深さを減らすことができる。
【0063】
組織治療面の面積は非常に様々で、そしてこの組織治療面は種々の形状をしていることがあり、特定の用途のために選択された特別な面積と形状とを有している。形状は、平面、凹面、凸面、半球状、円錐状、直線状「イン−ライン」列、又は任意の他の規則性もしくは不規則性形状でありうる。最も一般的には、能動電極は、電気外科用器具のシャフト末端に形成され、再形成プロセスに使用するために平面的、円板状、若しくは半球状の表面を有し、又は切断に使用するために直線状の列になっているであろう。別の或いは付加的な例としては、能動電極は電気外科用器具のシャフトの横表面に形成され(例えばへらのように)、内視鏡的処置において特定の人体構造にアクセスし易くなっている。
【0064】
本発明が、電気的に独立した能動電極或いは複数の能動電極に限定されるものではないことを明らかに理解すべきである。例えば、能動電極の列はカテーテルのシャフトを通じて高周波電流の電力源まで延びる単一のリード線に接続されていることがある。代わりに、この器具が、カテーテルのシャフトを直接に通って延びる単一の電極、或いは電力源まで延びる一本のリード線に接続される単一の電極を組み込むことがある。能動電極はボール状(例えば組織の蒸発と解離のため)、渦巻き形状(蒸発と針状切断のため)、スプリング形状(組織の急速収縮と解離のため)、捩じられた金属形状、環状或いは中実チューブ形状等を有する。別の例では、電極は複数のフィラメント、剛性或いは可撓性ブラシ電極(フィブロイド、膀胱腫瘍もしくは前立腺肥大等の腫瘍の縮小のため)、シャフトの側面の側面効果ブラシ電極、又はコイル状電極等を含む。
【0065】
幾つかの実施形態においては、電極支持部及び流体出口が、器具又はハンドピースの外表面から凹んで形成され、電極支持部を直接に取り囲む領域に導電性流体を閉じ込める。その上、シャフトは、電極支持部と流体出口との周囲に空洞を形成するような形状をしている。このことは、導電性流体が能動電極と復帰電極とに接触して保たれることを確実にすることに役立ち、前記両電極の間に導電性経路を維持する。さらに、このことが、能動電極と治療個所の組織との間に、蒸気層と、引き続くプラズマ層を処置の間中維持することに役立ち、これは導電性流体の不足に起因して蒸気層が絶えた場合に生じる熱損傷を減らすであろう。目標個所の周囲に導電性流体を提供するすことは、組織温度を望ましいレベルに維持することに役立つ。
【0066】
他の実施形態においては、能動電極は組織から充分な距離だけ離れており、組織と、能動電極の周囲に形成された蒸気層との間の接触を少なくし、或いは防止する。これらの実施形態においては、これらの電子が蒸気層から導電性流体を介して復帰電極まで移動して戻るので、蒸気層の加熱電子と組織との間の接触が最小限に抑えられる。しかし、プラズマ内のイオンは、高電圧レベル等の特定の条件下では充分なエネルギを有し、加速されて蒸気層を越えて組織まで至る。こうして、組織結合は前記実施形態の場合のように解離或いは破壊され、一方、組織に接する電子流、したがって熱エネルギが少なくなる。
【0067】
導電性流体は、しきい値導電性を持つ必要があり、それによって復帰電極と能動電極との間に適宜な導電性経路を提供する。流体の導電率(ミリジーメンス毎センチメートル、或いはmS/cmの単位)は、通常、0.2mS/cm より大きく、好ましくは2mS/cm より大きく、更に好ましくは10mS/cm より大きい。例示の実施形態においては、導電性流体は等張塩水であり、これは約17mS/cm の導電率を有する。本出願人は、より導電性高い流体或いは高いイオン化濃度を有する流体が更に烈しい切除率を提供することを見出した。例えば、従来の塩水(約0.9%の塩化ナトリウムのレベル)よりも高い、例えば1%より高いレベル或いは約3〜20%の間のレベルの塩化ナトリウムの塩水が望ましい。別の例では、本発明は異なるタイプの導電性流体を用いており、前記異なるタイプの導電性流体は、例えばプラズマ中のイオンの量を増加させることによって、又はナトリウムイオンよりも高いエネルギレベルを有するイオンを提供することによって、プラズマ層のパワーを増大させるものである。例えば、本発明は、ナトリウム以外の元素、例えばカリウム、マグネシウム、カルシウム、その他の周期律表の左端に近い金属を用いてもよい。
【0068】
復帰電極と能動電極との間に印加される電圧差は、高周波にあり、典型的には約5kHz 〜20MHz 、通常は約30kHz 〜2.5MHz 、好ましくは約50kHz〜500kHz 、多くは350kHz未満 、そして多くは約100kHz〜200kHz である。幾つかの用途においては、本出願人は、組織のインピーダンスが約100kHzの周波数で非常に大きいので、約100kHz の周波数が有用であることを見出した。心臓、頭部或いは頸部又はその周辺における処置等の他の用途においては、心臓、或いは頭部及び頸部の神経に流れる低周波電流を少なくするためにより高い周波数が望ましく(例えば400〜600kHz )。印加されるRMS(root mean square) 電圧は、通常、能動電極のサイズ、動作周波数、及び個別の処置の手術の態様、又は組織に対する望ましい効果(即ち、収縮、凝固、切断、切除等)に応じて、約5〜1000ボルトの範囲、好ましくは約10〜500ボルトの範囲、多くは約150〜400ボルトの範囲にある。典型的には、方形波形を有する切除又は切断用ピークピーク電圧は、10〜2000ボルトの範囲、好ましくは100〜1800ボルトの範囲、更に好ましくは約300〜1500ボルトの範囲、多くは300〜800ボルトの範囲にある(これも電極サイズ、電子数、動作周波数、作用モードに依存する)。低いピークピーク電圧は、組織の凝固、組織の加熱、又はコラーゲンの収縮のために使用され、典型的には50〜1500ボルト、好ましくは100〜1000ボルト、更に好ましくは120〜400ボルトの範囲にある(再びこれらの値は方形波形を使用して計算された)。高いピークピーク電圧、例えば約800ボルトより大きい電圧は、電極形状と導電性流体の成分、その他の因子に応じて、骨等の固い材料を切除するのに望ましい。
【0069】
前述のように、電圧は、通常、(例えば小さな壊死深さを得るための約10〜20Hzのパルスを有するレーザーと比べて)この電圧が連続的に効果的に印加されるように、一連の電圧パルス、或いは充分に高い周波数(例えば5kHz 〜20MHz のオーダー) を有する時間変化する電圧振幅の交流として供給される。更に、デューティサイクル(即ち、任意の1秒間でエネルギが付与される累積時間)は、約0.0001%のデューティサイクルを有するパルス状レーザーと比較して、本発明の場合には約50%のオーダーである。
【0070】
本発明の好ましい電力源は、治療対象の目標組織の容積及び/又は器具先端に関して選択された最大許容温度に応じて、一電極当たりに数ミリワット〜数十ワットの範囲の平均電力レベルを発生するように選択可能な高周波電流を供給する。この電力源は、使用者が、特別な神経外科的処置、心臓外科、関節鏡的外科、皮膚病の治療、眼の治療、開放式手術、若しくはその他の内視鏡的外科処置等の固有の要求条件に従って電圧のレベルを選ぶことを可能にする。心臓の処置のため及び潜在的には神経外科のために、この電力源は100kHz 以下、特に約60kHz の周波数における漏洩電圧のフィルタリングを行なう補助フィルタを有している。別の例では、例えば300〜600kHz の高い動作周波数を有する電力源が、低周波の迷走電流が問題となる特定の処置に使用される。一つの好適な電力源の説明は、1998年4月10日に出願された係属中の特許出願第 09/058571号及び09/058336号(代理人事件番号第 CB-2 及び CB-4号) に見出すことができ、両出願の完全な開示は、全ての目的のために引用によって本明細書中に組み込まれる。
【0071】
電力源は電流制限され、さもなければ目標組織又は周囲の(非目標)組織の望ましくない加熱が起こらないように制御される。現在のところ好ましい実施形態においては、電流制限インダクタが独立した各能動電極に直列に設けられ、ここで、インダクタのインダクタンスは、目標組織の電気的特性、所望の組織加熱率、及び動作周波数に応じて、10〜50000uH の範囲にある。別の例では、米国特許第 5697909号に以前に説明されたように、コンデンサ/インダクタ(LC)回路構造が採用されることがあるが、前記特許の完全な開示は、引用によって本明細書中に組み込まれる。これに加えて、電流制限抵抗器が選択されることがある。好ましくは、これらの抵抗器は大きな正の抵抗温度係数を有し、低抵抗媒体(例えば塩水洗滌液や血液)に接触する個々の能動電極に対する電流レベルが上昇を開始するとき、電流制限抵抗器の抵抗が著しく増大することにより、前記能動電極からの低抵抗媒体(例えば塩水洗滌液や血液)への電力供給を減らす。
【0072】
図1を参照して、脊柱の組織の治療のための例示の電気外科用装置11を詳細に説明する。一般的にこの電気外科用装置11は、目標箇所に高周波電圧を付与する電力源28に接続された電気外科用ハンドピース若しくはプローブ10と、このプローブ10に導電性流体50を供給する流体源21とを具えている。更に、この電気外科用装置11は、手術箇所を見るための光ファイバのヘッドライトを有する内視鏡(図示しない)を具えることもできる。この内視鏡はプローブ10と一体化されていてもよいし、或いは別の器具の一部であってもよい。この装置11は、目標箇所を吸引するためにプローブ10の吸引中空部若しくはチューブ211(図4参照)に接続される真空源(図示しない)も含んでいる。
【0073】
図示のように、一般的にプローブ10は、基端ハンドル19と、末端に能動電極58の列12を有する細長いシャフト18とを含んでいる。接続ケーブル34は能動電極58を電力源28に電気的に接続するコネクタ26を有している。能動電極58は電気的に互いに独立しており、各電極58は、それぞれ絶縁された複数の導体(図示しない)によって電力源28内の能動或いは受動制御ネットワークに接続されている。導電性流体50を目標箇所に供給するために、流体供給チューブ15がプローブ10の流体チューブ14に接続されている。流体供給チューブ15は必要に応じて適宜なポンプ(図示しない)に接続されてもよい。
【0074】
電源装置28は、印加される電圧レベルを変更するために、作業者の制御可能な電圧レベル調節器30を有し、この電圧レベルは電圧レベルディスプレイ32で観察可能である。電力源28は第1、第2及び第3フットペダル37、38、39と、電源装置28に取り外し可能に接続されたケーブル36も含んでいる。フットペダル37、38、39によって、外科医は遠隔操作で能動電極58に印加されるエネルギレベルを調節することができる。一つの典型的実施形態においては、第1フットペダル37は電源装置を「切除」モードにするのに使用され、第2フットペダル38は電源装置28を(例えば組織の凝固或いは収縮のための)「非切除」モードにするのに使用される。第3フットペダル39は使用者が電圧レベルを「切除」モード以内に調節することを可能にする。この切除モードにおいては、能動電極に充分な電圧が印加され、組織の分子解離のための必要条件を確立する(即ち、導電性流体の一部を蒸発させ、蒸気層内の帯電粒子をイオン化し、そしてこれらの帯電粒子を組織に対して加速させる)。このように、切除のために必要な電圧レベルは、電極の、数、サイズ、形状、及び間隔、並びに電極が支持部材から延びている距離、その他に応じて変化するであろう。外科医が電源装置を「切除」モードに設定すると、電圧レベル調節器30又は第3フットペダル39が、切除の程度或いは積極性を調節するために、電圧レベルを調節することに使用される。
【0075】
勿論、電源装置の電圧と様式的属性を他の入力装置によって制御することもできることが理解されるであろう。しかし、本出願人は、手術の際にプローブを操作しながら電源装置を制御する便利な方法はフットペダルであることを見出した。
【0076】
非切除モードにおいては、電源装置28は能動電極に充分低い電圧を供給し、導電性流体の蒸発とそれに引き続く組織分子の解離を防止する。外科医は、フットペダル37と38それぞれを交互に踏みつけることによって、切除モードと非切除モードとの間で電源装置を自動的に切り替えることができる。幾つかの実施形態においては、これによって外科医は、手術個所に対する集中をそらすことなく、或いは助手に対して電源装置のスイッチを操作することを命ずる必要なしに、その場で凝固/加熱と切除の間を迅速に移ることができる。一例によれば、外科医が切除モードで柔らかい組織の形を整える際に、プローブは組織内の切断された小さな血管を密閉すると同時に凝固させる。しかし、大きな血管、或いは高い流体圧力を有する血管(例えば動脈)は切除モードでは密閉されない。したがって、外科医は単にフットペダル38を踏んで、電圧を切除のためのしきい値以下に自動的に低下させ、そして切断された血管に対して充分な時間をかけて充分な圧力を付与して、血管を密閉及び/又は凝固させる。これが完了した後、外科医はフットペダル37を踏むことによって切除モードに迅速に復帰させることができる。
【0077】
ここで図2と図3を参照して、本発明の原理にしたがって使用される代表的な高周波電源装置を説明する。本発明のこの高周波電源装置は、一つ以上の能動電極(及び/又は凝固電極)と一つ以上の復帰電極との間に約10ボルトRMS 〜500ボルトRMS の高周波電圧を付与するように構成されている。典型的な実施形態では、電源装置は切除モードにおいては約70ボルトRMS 〜350ボルトRMS 、非切除モードにおいては、約20ボルトRMS 〜90ボルトRMS 、好ましくは45ボルトRMS 〜70ボルトRMS を付与する(勿論、これらの値は電源装置に取付けられるプローブの形状と所望の手術モードに応じて変化するであろう)。
【0078】
好ましい本発明の電源装置は、治療対象の目標組織の容積及び/又はプローブ先端に対して選択された最大許容温度に応じて、一つの電極当たり数ミリワットから数十ワットの範囲の平均電力レベルを発生するように選択可能な高周波電流を供給する。この電源装置によれば、使用者は、例えば脊柱の手術、関節鏡による手術、皮膚の処置、眼の処置、開放的手術或いはその他の内視鏡手術による処置等の個々の処置の特有な要求に応じた電圧レベルを選ぶことができる。
【0079】
図2に示されているように、一般的に電源装置は、電気外科用プローブが使用される場合に電力出力信号71を介して電極アセンブリによって代表される負荷インピーダンスに接続するための出力接続部を有する高周波(RF)電力発振器70を具えている。代表的な実施形態においては、このRF発振器は約100kHz で作動する。RF発振器はこの周波数に限定されるものではなく、約300〜600kHz の周波数で作動することもある。特に、心臓に適用するには、RF発振器は約400〜約600kHz の範囲で作動することが望ましい。RF発振器は、一般的に約1〜2の波高率を有する方形波信号を供給する。勿論、この信号は、用途、並びに例えば印加電圧及び電極の数と配置のような因子に応じて正弦波信号その他の適宜な波形の信号であってもよい。電力出力信号71は負荷の下で最小の電圧減少(即ちサグsag)を受けるように作られている。これによって、能動電極と復帰電極とに印加される電圧が改善され、組織の量的除去(切除)率が改善される。
【0080】
電力は、従来型の変圧器ではなく、電力ラインとRF発振器との間を接続するスイッチング電源72によってRF発振器70に供給される。スイッチング電源72は、電源装置28がかさばる変圧器の大きなサイズや重量から解放されて高いピーク電力を得ることを可能にする。スイッチング電源のこの構成は、米国及び外国のEMIの要求に適合する電磁ノイズを減らすようにも設計されている。この構成は、ゼロ電圧スイッチング又は交差を具えており、これによってトランジスタは電圧がゼロの場合にオン及びオフに切り替えられる。したがって、トランジスタのスイッチングによって生じる電磁ノイズが大幅に減少する。一実施形態においては、スイッチング電源72は約100kHz で作動する。
【0081】
オペレータ制御装置73(即ちフットペダルと電圧選択装置)とディスプレイ76に接続されたコントローラ74は、供給電圧を変化させることによってジェネレータの出力電力を調節するために、スイッチング電源72の制御入力部に接続されている。コントローラ74はマイクロプロセッサや集積回路である。電源装置は出力電流を検出する一つ以上の電流センサ75も含んでいる。電源装置は、中に入れる電気部品のための耐久性ある外装を提供する金属ケース内に格納されていることが好ましい。更に、この金属ケースは、接地された金属ケースが「ファラデイのシールド (Faraday shield) 」として機能し、電磁ノイズの内部発生源から周囲をシールドするので、電源装置の内部で発生された電磁ノイズを低減させる。
【0082】
電源装置は、多くの異なる外科的処置(例えば、関節鏡検査、泌尿器疾患の処置、一般的な手術、皮膚疾患の処置、脳神経外科的処置等)に必要な一般の電気部品を含んだメインボードもしくはマザーボードと、適用分野に固有の電流制限回路部品(例えばインダクタ、抵抗器、コンデンサ等)を含んだドーターボードとを一般的に具えている。このドーターボードは取り外し可能な多ピン型コネクタによってマザーボードに接続され、例えば異なる電流制限回路構成を必要とする用途への電源装置の便利な変更を可能にする。例えば、関節鏡検査のためには、ドーターボードは、能動電極102(図4参照)に電流を供給するチャンネルの各々に対して、約200〜400マイクロヘンリー、通常は約300マイクロヘンリーの複数のインダクタを具えていることが好ましい。
【0083】
別の例として一実施形態においては、電流制限インダクタは独立した能動電極のそれぞれに直列に配置され、ここでこのインダクタのインダクタンスは、目標組織の電気的特性、所望の組織加熱速度、及び動作周波数に応じて10uH〜50000uHの範囲にある。代りに、係属中のPCT出願第PCT/US94/05168号で前述したように、コンデンサ/インダクタ(LC)回路構成が採用されることがあり、これの完全な開示はこの引用によって本明細書に組み込まれる。更に、電流制限抵抗器が選択されてもよい。好ましくは、これらの抵抗器は大きい正の抵抗温度係数を有し、その結果低抵抗の媒体(例えば塩水洗滌液又は導体ゲル)に接している任意の個々の能動電極に対して電流レベルが上昇し始めると、電流制限抵抗器の抵抗が著しく増加し、それによってこの能動電極から前記低抵抗媒体(例えば塩水洗滌液又は導体ゲル)への電力供給を少なくする。電力出力信号も複数の電流制限エレメント96に接続され、これらの電流制限エレメントは用途によって変化するので、ドーターボード上に配置されることが好ましい。代表的な電源装置は、以前に引用によって本明細書中に組み込まれた、一般承継された米国特許出願第09/058571号の中に見出すことができる。
【0084】
図4〜図6は本発明の原理によって構成された典型的電気外科用プローブ20を示している。図4に示されているように、プローブ20は、一般に可撓性又は剛性を有する細長いシャフト100と、該シャフト100の基端に取り付けられたハンドル204と、シャフト100の末端に取り付けられた電極支持部材102とを含んでいる。シャフト100は、通常は金属である導電性材料を好ましく具えており、前記金属はタングステン、ステンレススチール合金、白金又はその合金、チタン又はその合金、モリブデン又はその合金、及びニッケル又はその合金からなる群から選ばれている。この実施形態においては、シャフト100は電気絶縁ジャケット108を含んでおり、これは典型的にはポリテトラフルオロエチレン、ポリイミド等の一つ以上の絶縁性シース又はコーティングとして形成されている。この電気絶縁ジャケットをシャフトに被せることによって、これらの金属エレメントと隣接する人体構造又は外科医との直接的な電気接触が防がれる。このような人体構造(例えば腱)と露出した電極との間の直接的な電気接触が、接触点における好ましくない構造の加熱と壊死を招き、壊死を引起す。代りに復帰電極が、環状バンドを具備してもよく、この環状バンドは、絶縁シャフトに取り付けられていて、かつシャフトの中でシャフト基端へ延びるコネクタを有するものである。
【0085】
ハンドル204は、典型的には外科医による取り扱いに適した適宜な形状に容易に成形可能なプラスチック材料からなる。ハンドル204は、電気接続部250(図6)を収納する内部空洞(図示しない)を形成し、電気接続ケーブルの末端部分22(図1参照)に接続するための適宜なインターフェースを提供している。電極支持部材102がシャフト100の末端から延び(通常は約1〜20mm)、電気的に独立した複数の能動電極104(図5参照)のための支持部を提供している。図4に示されているように、流体チューブ233が、導電性流体を目標個所に供給するために、ハンドル204の開口を貫通して延び、また流体供給源に接続されたコネクタ235を含んでいる。シャフト100の末端の表面形状に応じて、流体チューブ233はシャフト100の一つの中空部(図示しない)を貫通しているか、或いはシャフト100を貫通して末端の複数の開口まで延在する複数の中空部(これも図示しない)に接続されている。代表的な実施形態においては、チューブ239は、シャフト100の外側に沿って復帰電極112(図5参照)の末端の点まで延びているチューブである。この実施形態においては、流体は開口237を通って流れ、復帰電極112を過ぎて能動電極104まで達する。プローブ20は、目標個所への導電性流体の流速を制御するため、弁17(図1)或いはこれと同等な構造も含むことがある。
【0086】
図4に示されているように、治療対象の組織の手術個所へのアクセスを改善するためにシャフト100の末端部分は好ましく湾曲している。電極支持部材102は、ほぼ平らな組織治療面212(図5)を有し、この面はシャフト100の長手方向軸に対して通常は約10〜90度の角度、好ましくは約30〜60度、更に好ましくは約45度の角度をなしている。別の実施形態においては、シャフト100の末端部分は、シャフトの長手方向軸に対して曲がることが可能な可撓性材料で構成されている。この曲がりは、例えば牽引ワイヤの機械的張力により、或いは外から付与される温度変化によって膨張収縮する形状記憶ワイヤによって選択的に引き起こされる。この実施形態の更に完全な説明は、米国特許第5697909号に見出され、その完全な開示は以前に引用によって本明細書中に組み込まれる。代わりに、本発明のシャフト100が、従来型の曲げ工具等を用いて医師によって適当な角度に曲げられてもよい。
【0087】
図4〜図6に示された実施形態においては、プローブ20は能動電極104と高周波電源装置28(図1参照)との間の電流経路を完成する復帰電極112を含んでいる。図示の如く、復帰電極112は、シャフト100の露出部分を好ましく構成しており、前記シャフト100の露出部分は、電極支持部材102の組織治療面212の僅かに基端側の方のシャフト100の末端近傍に環状導体バンドとして形成されたものであり、典型的には約0. 5〜10mm、更に好ましくは約1〜10mmである。復帰電極112或いはシャフト100は、プローブ10/20の基端まで延びているコネクタ258に接続され、そこで電源装置28(図1)に適宜に接続されている。
【0088】
図4に示されているように、復帰電極112は能動電極104に直接には接続されていない。能動電極104が復帰電極112に電気的に接続されるようにこの電流経路を完成させるために、導電性流体(例えば等張塩水)が両者の間に流される。この代表的な実施形態においては、前述のように導電性流体が流体チューブ233を通って開口237まで供給される。代りに、導電性流体がプローブ20とは別の流体供給エレメント(図示しない)によって供給されることがある。例えば関節鏡を使用する手術においては、関節の目標領域は等張塩水に冠水され、プローブ90はこの冠水された目標領域に導入される。導電性流体は連続的に再供給され、復帰電極112と能動電極104との間の導電経路を維持する。他の実施形態においては、プローブ20の末端部分は、目標個所に位置決めされる前に、ゲルや等張塩水等の導電性流体源に浸されることがある。本出願人は、以下に述べるように、本発明によれば、この流体の表面張力及び/又はゲルの粘性によって導電性流体が能動電極及び復帰電極の周囲に残って、充分に長期にわたってその機能を完全に果たすことを見出した。代りに、ゲル等の導電性流体が目標個所に直接に付与されることがある。
【0089】
別の実施形態においては、流体経路は、例えば復帰電極とシャフト100内のチューブ状支持部材との間の内部中空部もしくは環状間隙によって、プローブ90内に形成されてもよい(図8A及び図8B参照)。この環状間隙は、導電性流体が目標個所に向かって半径方向内向きに流れるようにシャフト100の周縁の近傍に形成され、或いは流体が半径方向外向きに流れるようにシャフト100の中心の近くで形成される。これら両方の実施形態においては、流体源(例えば手術個所の上方に持ち上げられた流体の袋、或いはポンプ装置を有する流体の袋)が制御可能な弁を有することもあるか又は有しないこともある流体供給チューブ(図示しない)を介してプローブ90に接続される。一つ以上の流体用中空部を組み込んだ電気外科用プローブが米国特許第 5697281号に見出され、その完全な開示は引用によって本明細書中に組み込まれる。
【0090】
図5を参照すると、電気的に独立した能動電極104は、電極支持部材102の組織治療面212の上方に離れている。この組織治療面と個々の能動電極104は、通常、前述の範囲内の寸法を有している。代表的な実施形態においては、組織治療面212は、1〜20mmの範囲の直径を有する円形断面形状を有している。個々の能動電極104は、約0.1〜4mmの距離、通常は約0.2〜2mmの距離だけ組織治療面212から外向きに延びていることが好ましい。本出願人は、この構成は能動電極104の周囲の高い電場強度とこれに関連する電流密度を高め、詳細に前述したように切除と収縮とを促進することを見出した。
【0091】
図4〜図6の実施形態においては、プローブは一つの大きな開口209を組織治療面212の中心部に含み、複数(例えば約3〜15)の能動電極を前記表面212の外辺部に含んでいる(図5参照)。代りに、プローブが組織治療面の外辺部に一つの環状或いは部分環状の能動電極を含んでいてもよい。中心開口209は、シャフト100内の吸引中空部(図示しない)と、目標個所から組織、流体及び/又は気体を吸い出す吸引チューブ211(図4)とに接続されている。この実施形態においては、一般的に、導電性流体は能動電極104を通過して半径方向内向きに流れ、次いで開口209を通って戻る。手術の際に導電性流体を吸い出すことによって、外科医は目標個所を見ることが可能であり、且つ流体が患者の体内に流入することが防がれる。
【0092】
勿論、本発明の電気外科用プローブ、例えば10/20/90の先端は種々の異なる形態を有していてもよいことが分かるであろう。例えば、プローブは、組織治療面212(図7B参照)の外辺部の周囲に複数の開口209を含んでいることがある(図7B参照)。この実施形態においては、能動電極104は、開口209から半径方向内側に配置されるように組織治療面212の中心から半径方向に延在している。これらの開口は、導電性流体を目標個所に供給するための流体チューブ233と、導電性流体が復帰電極112と能動電極104との間の導体経路を完成した後に流体を吸い出すための吸引チューブ211とに適宜に接続されている。
【0093】
図6は、能動電極104と復帰電極112とを電源装置28に接続するためにハンドル204の内部に設けられた電気接続部250を示す。図示されているように、複数のワイヤ252が、シャフト100を通って延在し、能動電極104を複数のピン254に接続し、これらのピンは接続ケーブルの末端22(図1)に接続するためにコネクタブロック256内に差し込まれる。同様に、復帰電極112は、ワイヤ258とプラグ260とを介してコネクタブロック256に接続される。
【0094】
本発明によれば、プローブ20は、同じ電源装置28を異なる電気外科手術に使用することができるように、特定の電極アセンブリの特徴である識別エレメントをさらに含んでいる。例えば、一実施形態においては、プローブ(例えば20)は、能動電極104と復帰電極112との間に印加される電圧を減少させる電圧減少エレメント或いは電圧減少回路を含んでいる。この電圧減少エレメントは、能動電極と復帰電極との間の電圧を充分に低下させて、導電性媒体及び/又は目標個所の柔らかい組織の切除に対する過剰な電力の消散を防ぐように、電源装置によって印加される電圧を低下させるのに役立っている。幾つかの実施形態においては、電圧減少エレメントは電源装置28が二つの異なる電圧を同時に二つの異なる電極に印加することを可能にする(図15D参照)。他の実施形態において、電圧減少エレメントは、主として電気外科用プローブが、ArthroCare Corporation (Sunnyvale, CA)から供給される、組織の切除や蒸発のための高電圧を印加するように構成された種々の電気外科用ジェネレータに適合することを可能にする。例えば、組織の加熱や凝固のために、この電圧減少エレメントは、約100ボルトrms 〜170ボルトrms の電圧(これはArthoCare Model 970 及び980 ( 即ち2000) ジェネレータにおける1又は2の設定である)を、組織の切除(例えば分子解離)をすることなく、組織の凝固を行うのに適した電圧である約45ボルトrms 〜60ボルトrms の電圧まで減少させるのに役立つ。
【0095】
勿論、幾つかの処置に対しては、プローブは電圧減少エレメントを必要としない場合が多い。代りに、プローブが必要に応じて電圧増加エレメント或いは回路を含んでいることもある。これとは別に、又はこれに加えて、電源装置28をプローブに接続するケーブル34及び/又はケーブル先端22が電圧減少エレメントとして使用されてもよい。電源装置、能動電極、及び復帰電極の間の電気回路にこのケーブルが設置された場合には、このケーブルは固有のキャパシタンスを有して電源装置の電圧を減少させるのに使用可能である。この実施形態においては,ケーブルの末端22は、単独で或いは前述の電圧減少エレメントの一つ、例えばコンデンサと組み合わせて使用される。更に、本発明は、組織の治療のために選択された範囲内の電圧を印加するように構成された電源装置と共に使用可能であることに注目すべきである。この実施形態では、電圧減少エレメント又は電圧減少回路部品は望ましくない。
【0096】
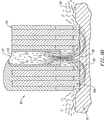
図8A〜図8Cは、本発明によるプローブ90の異なる三つの実施形態の末端部分を概略的に示している。図8Aに示されているように、能動電極104は、特定の処置の要求に基づいて製造時に平坦、半円形その他の形状に形成された適宜な絶縁材料(例えば、シリコーン、又は例えばアルミナ及びジルコニア等のセラミック、又はガラス材料)の支持マトリックス102′内にしっかり固定されている。好ましい支持マトリックス材料は、高い熱伝導性、良好な電気絶縁性、高い曲げ弾性率、炭素トラッキング抵抗、生体適合性、及び高い融点の故に、イリノイ州 Elkgrove の Kyocera Industrial Ceramics Corporation から入手可能なアルミナである。支持マトリックス102′は、このマトリックス102′とプローブ90の基端との間の距離の大部分又は全部にわたって延在するチューブ状支持部材78に接着結合されている。このチューブ状支持部材78は、エポキシ或いはシリコーンをベースとする材料のような電気絶縁材料で構成されていることが好ましい。
【0097】
好ましい構造技術において、能動電極104は、支持マトリックス102′に予め形成された開口を貫通して延びて、組織治療面212の上に所望の距離だけ突出する。次いで、これらの電極は、一般的には無機シール材料80によって支持マトリックス102′の組織治療面212に結合される。このシール材料80は、効果的な電気絶縁性と、支持マトリックス102′とプラチナ又はチタンの能動電極の両方に対して良好な接着性を提供するように選ばれている。シール材料80は、適合した熱膨張係数と、プラチナやチタン及びアルミナやジルコニアよりもずっと低い融点とを持つことが必要で、代表的にはガラス或いはガラスセラミックである。
【0098】
図8Aに示された実施形態においては、復帰電極112は、プローブ90のシャフト100の外周に位置決めされた環状部材を構成している。復帰電極112は、チューブ状支持部材78を完全に又は部分的に取り囲んで、両者間に環状間隙54を形成し、以下に述べるように導電性液体50が流れるようにしている。この間隙54は、好ましい0.25〜4mmの範囲の幅を有している。代りに、プローブ90が、支持部材78と復帰電極112との端に複数の長手方向のリブを具え、シャフト100の外辺部に沿って延在する複数の流体用中空部を形成することがある。この実施形態では、これらの複数の中空部は複数の開口に延びる。
【0099】
復帰電極112は、電気絶縁性ジャケット118の中に設置されており、前記電気絶縁性ジャケット118は、例えばポリテトラフルオロエチレン、ポリイミドのような一つ以上の電気絶縁性シース或いはコーティングとして通常は形成されている。この電気絶縁性ジャケット118を復帰電極の上に設置することによって、復帰電極112とこれに隣接する任意の人体構造との間の直接的電気接触が防がれる。人体構造(例えば腱)と露出した復帰電極112との間のそのような直接的電気接触は、接触点における人体構造の望ましくない加熱と壊死とをもたらす。
【0100】
図8Aに示されるように、復帰電極112は能動電極104に直接的には接続されていない。端子104が復帰電極112に電気的に接続されるように電流経路を完成するために、導電性液体50(例えば等張塩水)が流体経路83に沿って流される。この流体経路83は、復帰電極112とチューブ状支持部材78との間の環状間隙54によって形成される。この流体経路83を流れる導電性液体50は、図8Aに電流束のライン60によって示されているように、能動電極104と復帰電極112との間の電流のための経路を提供する。能動電極104と復帰電極112との間に電圧の差が付与されると、能動電極104から目標組織を通じて復帰電極112までの電流をともなって高い電場強度が能動電極104の先端に発生し、この高い電場強度が領域88の組織52の切除を引き起こす。
【0101】
図8Bは、チューブ状部材78の内部に位置決めされた復帰電極112を有する電気外科用プローブ90のもう一つの実施形態を示す。復帰電極112は、導電性液体50(例えば等張塩水)を流して復帰電極112に電気接触させるための内側中空部57を形成するチューブ状部材であることが好ましい。この実施形態においては、能動電極104と復帰電極112との間に電圧差が付与されると、電流束ライン60によって示されているように、導電性液体50を通じて電流が流れる。能動電極104の先端に付与された電圧差とこれに伴う高い電場強度の結果として、領域88において組織52が切除或いは離断される。
【0102】
図8Cは、図8Aと図8Bの実施形態の組み合わせであるプローブ90のもう一つの実施形態を示す。図示されているように、このプローブは、導電性流体を流すための内側中空部57、並びに一つの間隙或いは複数の外側中空部54との両方を含んでいる。この実施形態においては、復帰電極112は、図8Bに示されているようにチューブ状部材78の内部に設けられ、或いは図8Aに示されているようにチューブ状部材78の外側に設けられ、或いはこれら両方の位置に設けられてもよい。
【0103】
幾つかの実施形態においては、プローブ20/90は手術個所からの組織の破片を吸引する際の詰まりを防ぐための吸い出し中空部に接続された一つ以上の吸い出し電極も含んでいる。図9に示されているように、一つ以上の能動電極104は、シャフト100の内部の吸引中空部の開口を横切って延在するループ電極140を具えている。代表的な実施形態においては、二つの能動電極104が、末端開口209の上を横切るループ電極140を構成している。勿論、単独のループ電極や図示のものとは異なる形状の複数のループ電極等の種々の異なる形状も可能であることは判るであろう。更に、これらの電極は、図10と図11に示されているコイル状の形状等の、ループ以外の形状を持つこともできる。代りに、電極は、図13に示されているように、末端開口209の基部の吸引中空部の内部に形成されてもよい。ループ電極140の主たる機能は、吸引中空部に引き込まれた組織の部分を切除して、中空部の詰まりを防ぐことにある。
【0104】
幾つかの実施形態においては、ループ電極140は他の能動電極104から電気的に独立している。その他の実施形態において、ループ電極140と能動電極104は、両者が共に作動させられるように、互いに電気的に接続されることがある。ループ電極140は、互いに電気的に独立していても、独立していなくてもよい。ループ電極140は、通常、電極支持部材102の組織治療面から約0.05〜4mm、好ましくは約0.1〜1mmだけ突出している。
【0105】
図10と図11とを参照して、吸い込み電極の別の実施形態を説明する。図10に示すように、吸い込み電極は、吸引中空部の末端開口209を横切って延在する一対のコイル状電極150を具えている。コイル状電極150が大きな表面積を有する場合、通常、開口209に接近したり、これを通過したりする組織の破片を切除する際の電極150の効率を向上させる。図11において、吸い込み電極は、吸引中空部の末端開口209を横切る単一のコイル状電極154を具えている。この単一の電極152は吸引中空部の閉塞を防ぐのに充分である。代りに、吸い込み電極が末端開口209の基部の吸引中空部の内部に設けられてもよい。組織が電極154に到達する前に開口209を詰まらせることがないように、これらの電極は開口209の近くにあることが望ましい。この実施形態において、別の復帰電極(図示しない)が吸引中空部の内部に設けられて、電流をその中に閉じ込めるようにしてもよい。
【0106】
図12を参照すると、本発明のもう一つの実施形態が、吸い込み中空部162の末端部分を横切って延在するワイヤメッシュ状電極600を組み込んでいる。図示されているように、メッシュ状電極600は、複数の開口602を含んでおり、流体と組織の破片がこれを通じて中空部162に流れることを可能にしている。これらの開口602のサイズは種々の因子に応じて変化する。このメッシュ状電極は支持部材102の末端或いは基端表面に接続されている。ワイヤメッシュ状電極600は、チタン、タンタル、スチール、ステンレス、タングステン、銅、金等の導電性金属からなる。代表的な実施形態では、ワイヤメッシュ状電極600は能動電極104とは異なる電位を有する異なる材料で構成されている。メッシュ状電極600がスチールからなり、能動電極104がタングステンからなることが好ましい。本出願人は、メッシュ状電極600と能動電極104との電気化学的電位の僅かな差異がこの装置の性能を改善することを見出した。勿論、前述の実施形態におけるように、メッシュ状電極600と能動電極104とは電気的に絶縁されていてもよいことは判るであろう。
【0107】
図13を参照すると、本発明のもう一つの実施態様は、プローブの吸い込み中空部162の内部に吸い込み電極160を組み込んでいる。図示のように、電極160は、組織の破片が中空部162に入る際に切除されるように、末端開口209に隣接して位置決めされている。この代表的な実施形態においては、吸い込み電極160は、吸い込み中空部162を横断して延在するループ電極を構成している。しかし、多くの他の形状も可能なことは判るであろう。この実施態様においては、復帰電極164は前述の実施形態におけるようにシャフトの外側の近くに設置されている。代わりに、復帰電極が、吸い込み電極160を有する吸い込み中空部162の内部に設けられることがある。例えば、内部絶縁コーティング163が中空部162の内部で露出させられて、復帰電極164のこの露出部分と吸い込み電極160との間に導電性経路を提供する。この後者の実施形態は、電流を吸い込み中空部の内部に限定する利点を有する。更に、導電性流体が目標個所に供給される乾燥フィールドにおいて、導電性流体が組織破片と共に吸い込み中空部162を通じて吸い込まれるので、後者の実施形態において能動電極と復帰電極との間に導電性流体経路を維持することが通常は容易になる。
【0108】
ここで図14A〜図14Cを参照すると、金属スクリーン610を組み込んだ別の実施形態が示されている。図示されているように、この金属スクリーン610は能動電極104を受け入れるための複数の周縁開口612と、吸い込み中空部の開口609を通じて流体及び組織を吸い込むことを可能にする複数の内側開口614とを有している。図示されているように、スクリーン610は能動電極104の上から圧入され、そしてプローブ20/90のシャフト100に接着される。メッシュ状電極の実施形態と同様に、金属スクリーン610は、チタン、タンタル、スチール、ステンレス、タングステン、銅、金等の種々の導電性金属で構成可能である。代表的な実施形態においては、金属スクリーン610は能動電極104に直接接続されるか、或いはこれと一体化されている。この実施形態においては、能動電極104と金属スクリーン610は、互いに電気的に接続されている。
【0109】
図15A〜図15Dは、ヘルニアの治療又は罹患した椎間板の治療のために特別に作られた電気外科用プローブ350の実施形態を示す。図15Aを参照すると、プローブ350は、導電性シャフト352、このシャフト352の基端に接続されたハンドル354、及びこのシャフト352の末端の電気絶縁性支持部材356を具えている。プローブ350は、更にシャフト352に被せた収縮包装絶縁スリーブ358と復帰電極360として機能するシャフト352の露出部分とを含んでいる。代表的な実施形態においては、プローブ350は、支持部材356の末端から延びる複数の能動電極362を具えている。図示のように、復帰電極360は前述の実施形態におけるよりも能動電極362から長い距離離れている。この実施形態においては、復帰電極360は能動電極362から約2.0〜50mm、好ましくは約5〜25mmの距離だけ離れている。更に、復帰電極360は前述の実施形態におけるよりも大きい約2.0〜40mm、好ましくは約5〜20mmの範囲の長さを有する露出表面積を有している。したがって、能動電極362から復帰電極360に流れる電流は、前述の実施形態におけるよりもシャフト352から離れた電流経路370に従って流れるであろう。或る用途においては、この電流経路370は同じ電圧レベルで周囲の組織により深く電流を貫通させ、したがって組織の加熱を増大させる。以上述べたように、この増大した加熱が、或る用途においては椎間板或いはその他の脊椎異常の治療に有利なことがある。一般的には、約60〜100℃の範囲の組織温度を約0.2〜5mmの深さ、通常は約1〜2mmの深さまで得ることが望ましい。この熱損傷に必要な電圧は、一部には電極の形状、組織の及び電極の直接周囲にある領域の導電性、電圧が印加される時間、並びに所望の組織損傷の深さに応じて決められる。図15A〜図15Dに記載された電極の構成によれば、加熱用の電圧レベルは、通常、約20〜300ボルトrms 、好ましくは約60〜200ボルトrms の範囲にある。約2の波高率を有する方形波を用いた加熱用のピークピーク電圧は、約40〜600ピークピークボルト、好ましくは約120〜400ピークピークボルトの範囲にある。電圧がこの範囲で高ければ高いほど、必要な時間が少なくてすむ。しかし、この電圧が高過ぎると、表面組織が蒸発し、縮小し、或いは切除されるが、これは好ましくない。
【0110】
別の実施形態においては、プローブ350と連携して使用される電気外科装置は、双極モードと単極モードの間の切り替えのための分散型復帰電極450(図16参照)を含んでいる。この実施形態では、この装置は、分散型パッド450が活性化されずに電圧が能動電極362と復帰電極360との間に印加される切除モードと、能動電極362が活性化されずに分散型パッド450と復帰電極360との間に印加される非切除もしくは加熱モードとの間を切り換えるであろう。非切除モードにおいては、通常、低い電圧が印加され、復帰電極360は、能動電極として機能して、復帰電極360の周囲の組織の加熱及び/又は凝固を行う。
【0111】
図15Bは本発明の更に別の実施形態を示す。図示されているように、電気外科用プローブ350は前述の実施形態におけるように一つ以上の能動電極362と基部側に離間した復帰電極360とを有する電極アセンブリ372を具えている。復帰電極360は、能動電極362から約0.5〜25mm、好ましくは1.0〜5.0mm離れ、且つ約1〜20mmの露出長さを有している。更に、この電極アセンブリ372は、復帰電極360の両側面に軸方向に離れた二つの補助電極374と376とを含んでいる。これらの電極374と376は、典型的には復帰電極360から約0.5〜25mm、好ましくは約1〜5mm離れている。代表的な実施形態では、補助電極374と376はシャフト352の露出部分であり、復帰電極360はシャフト352と電気的に絶縁されて、電極374、376と電極360との間に電圧差が印加されるようになっている。この実施形態においては、プローブ350は、切除モード、及び非切除モードもしくは加熱モードの少なくとも二つの異なるモードで使用可能である。切除モードにおいては、電圧が、前述のように導電性流体の存在下において能動電極362と復帰電極360との間に印加される。切除モードにおいては、電極374、376は活性化されない。加熱モードもしくは凝固モードにおいては、能動電極362は活性化されず、電極374、376と電極360との間に電圧差が印加されて、図15Bに示されているように、高周波電流370が両者間に流れるようになっている。加熱モードにおいては、プラズマ形成と切除とのためのしきい値以下の低い電圧ではあるが、電極の直ぐ周囲の組織を蒸発させたり収縮させたりすることなく、幾らかの熱的損傷を引き起こすのに充分な電圧が印加されて、電流370が、電極360、372、374の周囲の組織の加熱及び又は凝固を提供する。
【0112】
図15Cは、前述の実施形態におけるように、一つ以上の能動電極362と基部側に離れた復帰電極360とを有する電極アセンブリ372を組み込んだプローブ350のもう一つの実施形態を示す。復帰電極360は、能動電極362から約0.5〜25mm、好ましくは1.0〜5.0mmだけ離れており、且つ約1〜20mmの露出長さを有している。更に、この電極アセンブリ372は、電気絶縁性スペーサ382によって復帰電極360から分離されている第2能動電極380を含んでいる。この実施形態では、ハンドル354は、プローブ350を少なくとも二つのモード、即ち切除モードと、非切除モードもしくは加熱モードとの間で切り替えるスイッチ384を含んでいる。切除モードにおいては、前述したように導電性流体の存在下で能動電極362と復帰電極360との間に電圧が印加される。切除モードにおいては、電極380は活性化されない。加熱モードもしくは凝固モードにおいては、能動電極362は活性化されず、電極380と電極360との間に高周波電流370が流れるように両者間に電圧差が印加される。代わりに、より小さな電極のより大きな抵抗が、電極362を回路から物理的に切り離す必要なしに自動的に電流を電極380に送るとき、能動電極362が非活性化されないことがある。加熱モードにおいては、通常はプラズマ形成と切除のしきい値以下の低い電圧であるが、電極を直接に取り囲む組織を蒸発させたり収縮させたりすることなくこの組織に或る程度の熱的損傷を与えるのに充分な電圧が印加され、電流370が、電極360と380との周囲の組織を加熱及び/又は凝固させる。
【0113】
勿論、上述の実施形態と同じ機能を達成するのに他の種々の実施形態を用いてもよいことは判るであろう。例えば、電気外科用プローブ350が、シャフト352の周囲に形成された複数の螺旋状バンドを含んでいて、一つ以上の電極が互いに軸方向に離間してシャフト352上に形成されるように一つ以上のこの螺旋状バンドがバンドの一部に接続された電極を有することがある。
【0114】
図15Dは、組織を貫通してその中に傷を作って椎間板並びに/又はいびき及び睡眠中の無呼吸を治療するように構成された別の実施形態である。図示のように、プローブ350は、復帰電極360と、該復帰電極360から基部側に離間した第3凝固電極380とを有する図15Cのプローブに似ている。この実施形態においては、能動電極362は絶縁性支持部材356から末端の方に延びる単一の電極ワイヤを具えている。勿論、この能動電極362は、その表面の電流密度を増加させる種々の形状、例えば末端の方にテーパの付いた円錐形、中空円筒、ループ電極等を有していてもよい。代表的な実施形態においては、支持部材356と382がセラミック、ガラス、シリコーン等の材料で構成されている。基部側の支持部材382は、この支持部材382が、有機材料を腐食したり脆弱化させたりするプラズマが存在しない状況下にあるので、より従来的な有機材料で構成されてもよい。
【0115】
図15Dのプローブ350はスイッチエレメントを含んではいない。この実施形態では、三つのすべての電極は電源装置が作動すると活性化される。復帰電極360は能動電極362及び凝固電極380とは反対の極性を有し、図示のように電流370が、能動電極362及び凝固電極380から復帰電極360まで流れるようになっている。この好適な実施形態においては、電気外科用装置は、凝固電極380と復帰電極360との間に印加される電圧を減少させるための電圧減少エレメントもしくは電圧減少回路を含んでいる。この電圧減少エレメントは、要するに電源装置28が二つの異なる電圧を同時に二つの異なる電極に印加できるようにしている。こうして、組織を貫通して孔を開けるために、手術者は、プローブの先端の組織(即ち、能動電極362に隣接した組織)を切除するのに充分な電圧を印加する。これと同時に、凝固電極380に印加された電圧は組織を切除するのには不充分なものである。例えば、組織の加熱や凝固の場合には、電圧減少エレメントが約100〜300ボルトrms の電圧を組織を切除(例えば分子の解離等)しないで凝固させるのに適した電圧である約45〜90ボルトrms まで減少させるのに用いられる。
【0116】
代表的な実施形態においては、この電圧減少エレメントは、電源装置と凝固電極380とに接続されたブリッジディバイダ(図示しない)を形成する一対のコンデンサで構成されている。このコンデンサは、通常、約200〜500pF(500ボルトで)、好ましくは約300〜350pF(500ボルトで)のキャパシタンスを有している。勿論、これらのコンデンサはこの装置内の他の場所に設けられてもよく、例えばケーブルの中に設けられるか或いは長さに沿って分布されるか、又はジェネレータ、又はコネクタ等に設けられてもよい。更に、ダイオード、トランジスタ、インダクタ、抵抗器、コンデンサ或いはそれらの組み合わせ等の他の電圧減少エレメントを本発明と連携して使用してもよいことは判るであろう。例えば、プローブ350が、復帰電極360と凝固電極380との間に印加された電圧を降下させるように構成されたコード化抵抗器(図示しない)を含んでもよい。更に、電気回路がこの目的のために採用されることもある。
【0117】
勿論、いくつかの処置のためには、プローブは一般的に電圧減少エレメントを必要としないであろう。代わりに、プローブが、必要なら電圧増加エレメント又は回路を含んでもよい。これとは別に、又はこれに加えて、電源装置28をプローブ90に接続するケーブル22/34が電圧減少エレメントとして使用されることもある。ケーブルは固有のキャパシタンスを有し、この固有のキャパシタンスは、ケーブルが電源装置、能動電極、及び復帰電極の間の電気回路内に設置された場合には、電源装置の電圧を減少させるのに使用可能である。この実施形態では、ケーブル22/34は単独で用いられてもよく、或いは前述の電圧減少エレメントの一つ、例えばコンデンサ等と組み合わせて用いられてもよい。更に、本発明は、組織の治療のために選択された範囲内にある二つの異なった電圧を印加するように構成された電源装置と共に使用されることが可能なことに注目すべきである。この実施形態においては、電圧減少エレメント又は回路は望ましくない。
【0118】
一つの特定な実施形態においては、プローブ350は、ワイヤの末端部分がチューブの末端部分を通って延びるように先ず第一に電極ワイヤ(能動電極362)をセラミックチューブ(絶縁部材356)に挿入し、そしてこのワイヤを通常は適宜なエポキシによってチューブに接合することによって製造される。次に、ステンレスのチューブ(復帰電極360)がセラミックチューブの基部に被せられ、ワイヤ(例えばニッケルワイヤ)が通常はスポット溶接によってステンレスチューブの内面に接合される。このステンレスチューブはエポキシによってセラミックチューブに結合され、そしてこの装置はオーブンその他の適宜な熱源の中で硬化される。次に、第2のセラミックチューブ(絶縁部材382)がステンレスチューブの基部の内側に設置され、同じように結合される。シャフト358が次に第2のセラミックチューブの基部に結合され、そしてシャフトの先端部分のみが露出するように絶縁スリーブ(例えばポリイミド)がシャフト358の周囲に被せられる(即ち、凝固電極380)。ニッケルワイヤの接続部はシャフト358の中心を通って延び、復帰電極360を電源装置に接続する。能動電極362は、シャフト358の先端部分を形成したり、或いは、シャフト358を通って電源装置まで延びるコネクタを有することもある。
【0119】
使用に際し、医師は能動電極362を治療対象の組織(即ち、椎間板)の隣に位置決めする。電源装置は作動して能動電極362と復帰電極360との間に切除電圧を提供し、凝固電極380と復帰電極360との間に凝固電圧、もしくは加熱電圧を提供する。次に、導電性流体が、能動電極362の周囲、及び能動電極360と復帰電極362との間の接続部に供給されて、それらの間に電流路を提供する。これは前述の種々の方法で達成される。能動電極362は、次に切除組織によって残された空間を通って前進し、椎間板にチャンネルを形成する。切除の際における凝固電極と復帰電極との間の電流は、これらの電極が、組織表面を通り抜けて能動電極362によって形成されたチャンネルの中に入り込むので、組織の表面に損傷を与えるのには通常は不充分である。医師がこのチャンネルを適宜な深さに形成すると、医師は能動電極の前進を中止し、この器具を約5〜30秒間保持するか、或いはこの器具の先端をチャンネルから直ちに取り去ることができる(以下のこれに関する詳細な説明を参照のこと)。いずれの場合でも、能動電極が前進しない場合には、これは実際上、組織の切除を中止する。
【0120】
能動電極362によって形成されたチャンネルに入る前に、開回路が復帰電極360と凝固電極380との間に存在する。凝固電極380が一旦このチャンネルに入ると、電流が凝固電極380から、チャンネルの周囲の組織を通じて復帰電極360まで流れる。この電流はチャンネルの直ぐ周囲の組織を加熱して、チャンネルの表面の切断された血管を凝固させる。医師が望むなら、この器具は一定の時間だけチャンネル内に保持され、以下に更に詳細に述べられるように、チャンネルの周囲に傷を形成する。
【0121】
図16は、電気外科用プローブ400に取付けられた分散型復帰パッド450を組み込んだ電気外科用装置の更に別の実施形態を示す。この実施形態においては、本発明は前述のように双極モードで機能する。更に、この装置440は、高周波電圧差が能動電極410と分散型復帰パッド450との間に印加される単極モードで機能することがある。この例示的実施形態においては、パッド450とプローブ400は共に接続され、両者は一回限りの使い捨ての物品である。このパッド450は、電源装置への直接接続のためにプローブ400のハンドル404内に延びる電気コネクタ452を含んでいる。勿論、本発明は、電源装置に直接接続している標準型の復帰パッドと共に作動可能でもある。この実施形態においては、電源装置460は、単極モードと双極モードとの間の切り換えのための、フットペダル462等のスイッチを含んでいる。双極モードにおいては、前述のように電源装置の復帰経路はプローブ400の復帰電極408に接続されている。単極モードにおいては、電源装置の復帰経路は、パッド450のコネクタ452に接続され、能動電極410が電気回路から切り離され、復帰電極408が能動電極として機能する。これによって、外科医が外科的処置の際又は前に双極モードと単極モードとの間を切り換えることを可能にする。場合によっては、単極モードで作動してより深い電流浸透を提供して、復帰電極の周囲の組織により大きな熱を与えることが望ましいことがある。組織の切除等の他の場合においては、組織への電流の浸透を制限するには双極モードが好ましい。
【0122】
ある構成では、分散型復帰パッド450は目標領域にほぼ近接した領域において患者の外表面に結び付くように構成されている。例えば、頭部と頸部の組織を治療する際には、分散型復帰パッドは、患者の肩、上背部、或いは胸の上部領域の内部又は周囲に設置されるように設計され、且つ構成されている。この設計は患者の身体を通して頭部及び頸部領域に達する電流経路を限定し、特に患者の心臓を通って流れる電流を最小にすることによって、患者の身体内の望ましくない電流経路によって生じる損傷を最小にするものである。復帰パッドはこのパッドにおける電流密度が最小になるように作られており、それによってパッドが取付けられている領域における患者の皮膚の火傷を最小限に抑える。
【0123】
図17を参照すると、本発明による電気外科装置がカテーテル装置400として構成されている。図17に示されているように、カテーテル装置400は、一般的に目標組織に高周波電圧を提供するために相互接続ケーブル486によって電源装置28に接続された電気外科用カテーテル400と、目標個所に導電性流体を提供する洗滌液容器もしくはタンク600とを具えている。一般的にカテーテル460は、細長い可撓性のシャフト本体462を具えており、前記シャフト本体は、該本体462の末端に組織除去・切除領域464を含んでいる。カテーテル460の基部は、カテーテル460の内部の中空部と電線との間、及び取付具614の基部側の導管とケーブルとの間の相互接続を提供する多中空部取付具614を含んでいる。一例として、カテーテルの電気コネクタ496は末端ケーブルコネクタ494に取り外し可能に接続され、一方、ケーブルコネクタ494はコネクタ492を介してジェネレータ28に取り外し可能に接続されている。カテーテル460内の一本以上のリード線(図示しない)は、組織切除領域464における一つ以上の能動電極463と凝固電極467との間に延在し、能動電極ケーブルの分岐487を介してカテーテルコネクタ496の一つ以上の対応する電気端子(図示しない)に延びている。同様に、組織切除領域464における復帰電極466はリード線(図示しない)によってカテーテルコネクタ496の復帰電気ケーブルの分岐489に接続されている。勿論、一つのケーブル分岐(図示しない)が能動電極と復帰電極の両方に対して使用されることもある。
【0124】
カテーテル本体462は、少なくともこの本体462の末端切除領域464の壁に補強繊維或いは編組(図示しない)を含んで、組織との係合の際の能動電極の回転の応答性の高いトルク制御を提供する。カテーテル本体462のこの剛性部分は、好ましくは約7〜10mmだけ延在し、このカテーテル本体462の残りの部分は可撓性を有し、電極の目標組織近傍への前進と位置決めの際に、良好な追跡可能性を提供する。
【0125】
幾つかの実施形態においては、導電性流体50が、カテーテル460内の中空部(図17には示されていない)を介してカテーテル460の組織切除領域464へ供給される。流体は、流体源から導電性流体供給ライン602と導管603とに沿って中空部に供給され、該導管は多中空部式取付具614において内部カテーテル中空部に接続されている。導電性流体(例えば等張性塩水)の源は洗滌ポンプ装置(図示しない)、或いは患者及び組織切除領域のレベルから数十センチメートル上方に配置された洗滌液タンク600等の重力駆動式供給装置であってよい。制御弁604が流体供給ライン602と導管603とのインターフェイス部に配置され、導電性流体50の流量の手動制御を可能にする。代わりに、導電性流体の流量の正確な制御を行うために、計量型ポンプもしくは流量調整器が用いられてもよい。
【0126】
装置400は、目標個所から液体と気体を吸い出すために、吸い出し或いは真空装置(図示しない)を更に含むことが可能である。この吸い出し装置は、通常、吸い出しコネクタ605によって取付具614に接続された真空源を具えている。
【0127】
本発明は、特に、例えば腰椎の椎間板切除による神経根の減圧のための顕微内視鏡式椎間板切除処置に有用である。図18〜図23に示されているように、上層274にアクセスできるように経皮的貫通部270が患者の背中272に作られる。一般的には、先ず小さな針(図示しない)が椎間板の空間位置を突きとめるために使用され、そして側部透視検査を行いながらガイドワイヤ(図示しない)が挿入されて上層274の下縁まで前進する。一連のカニューレ式拡張器276がガイドワイヤの上から挿入され、そして互いに切り口220から上層274までの孔を形成する。第1拡張器は、上層274を「触診」するのに使用され、棘状突起と、上層274の下縁の真上の小関節面複合体との間で、その先端の適正な位置を確保する。図21に示されているように、次に、チューブ状牽引子278が、最大の拡張器の上から通されて上層274に至る。拡張器276が取り外されて、チューブ状牽引子278の内部に作業回廊が確立される。
【0128】
図19に示されているように、次に内視鏡280がチューブ状牽引子278内に挿入され、又リングクランプ282が内視鏡280を固定するのに使用される。通常は、牽引子278内に作業回廊を形成することは、拡張器276と牽引子278とが上層274に下降するとき、この回廊内に押し込まれる柔らかい組織、筋肉その他のタイプの組織を除去することを必要とする。この組織は、通常、下垂体用骨鉗子、掻爬器、グリップ、カッター、ドリル、破片除去器等の機械的器具によって取り除かれる。不幸なことに、これらの機械的器具は処置の複雑性を非常に長引かせて増大させる。それに加えて、これらの器具は、この組織内の血管を切断して、通常、多大な出血を引き起こし、外科医が目標個所を見ることを妨害する。
【0129】
本発明のもう一つの態様によれば、前述の電気外科用プローブもしくはカテーテル284が牽引子278内の作業回廊内に導入され、この回廊から柔らかい組織、筋肉その他の障害物を取り除き、その結果外科医が上層274に容易にアクセスすることと可視化が可能になる。外科医がプローブ284を導入すると、導電性流体285をチューブ233と開口237を通じて組織に供給することが可能となる(図4参照)。この流体は、復帰電極112を通ってシャフト末端の能動電極104まで流れる。流体の流量は、組織と電極支持具102との間の領域が流体に常時浸漬されるように弁17(図1)によって制御される。次に、電源装置28がオンにされ、高周波電圧差が能動電極104と復帰電極112との間に印加されるように調節される。この導電性流体は、能動電極104と復帰電極112との間の導電性経路(電流束ラインを参照)を提供する。
【0130】
この高周波電圧は、目標組織と能動電極104との間の導電性流体(図示しない)をイオン化された蒸気層或いはプラズマ(図示しない)に変換するのに充分なものである。能動電極104と目標組織との間に印加される電圧差(即ち、プラズマ層を横切る電圧勾配)によって、プラズマの荷電粒子(即ち、電子)が組織の方に加速される。充分に高い電圧差があれば、これらの荷電粒子は、充分なエネルギを得て、組織構造内の分子結合を解離させる。この分子解離は、組織の体積的除去(即ち、除去的昇華)と酸素、窒素、二酸化炭素、水素、及びメタン等の低分子量の気体の生成を伴う。組織内の加速された荷電粒子の狭い範囲が、この分子解離プロセスを表面層に限定し、下層の組織の損傷と壊死を最小にする。
【0131】
このプロセスの際に、気体は開口209と吸引チューブ211を通じて真空源に吸い出される。それに加えて、過剰な導電性流体その他の流体(例えば、血液)が作業回廊から吸い出されて外科医の視野を改善する。組織の切除の際に、電流束ラインによって発生させられた残りの熱(代表的には150℃未満)は、通常、切断された血管をその場で凝固させるのに充分である。そうでない場合には、外科医は、前述のように電圧を流体の蒸発のためのしきい値以下のレベルまで降下させることによって、電源装置28を凝固モードに切り換える。この同時止血によって出血が少なくなり、外科医が治療を行う能力を増大させる。
【0132】
本発明のもう一つの利点は、下層及び周囲の組織、神経又は骨に対して壊死や熱的損傷を与えることなく、柔らかい組織を正確に切除する能力である。それに加えて、目標個所に向けるエネルギは上層274を切除するには不充分であって、上層に対して切除その他の著しい損傷を与えることなく、外科医が上層274から組織を字義通りに清掃できるように電圧を制御することが可能である。
【0133】
図20と図21を参照すると、作業回廊が充分に清掃されると、椎弓切開と中央脊椎関節切除が従来の技術(例えばKerrisonパンチや高速ドリル) や前述の電気外科用プローブ284によって行われる。神経根が特定されると、牽引子288によって医学的牽引を行うことができ、或いは本発明が使用されて椎間板が正確に切除される。必要に応じて、硬膜外血管が自動的に或いは本発明の凝固モードによって焼灼される。繊維輪切除術 が必要な場合には、神経根を牽引子288によって保護しながら本発明の微小ナイフ或いは切除メカニズムによって行うことができる。次に、ヘルニアを生じた椎間板290は標準様式の下垂体用骨鉗子によって、或いは再び前述のような切除によって除去される。
【0134】
別の実施形態においては、本発明は、椎間板290の内部に小さな孔やチャンネルが形成されるチャンネリング技術を含み、熱エネルギがこれらの孔やチャンネルのすぐ周囲の組織表面に付与されて、熱損傷を組織表面に起こさせ、それによって椎間板の周囲の組織構造を強化し且つ収縮させる。本出願人は、椎間板の組織構造のこのような強化は、椎間板の近くの脊椎神経に対して負荷される圧力を減らして、背部と頸部の痛みを解放することを発見した。
【0135】
図21に示されているように、電気外科用器具350は、前述のように或いは別の経皮的方法によって(以下の図23〜図25参照)椎間板290の目標個所に導入される。電極アセンブリ351は椎間板の表面に隣接したり押し当てられたりして位置決めされ、そして導電性流体が前述のように目標個所に供給される。代わりに、プローブ350を患者に導入する前に、導電性流体が目標個所に付与されたり、或いはプローブ350の末端が導電性流体やゲルに浸される。次に、電源装置28が、作動させられて、高周波電圧差が前述の電極アセンブリに印加されるように調節される。
【0136】
処置に応じて、外科医は電極を目標の椎間板組織に対して移動させ、椎間板内に孔、チャンネル、ストライプ、凹み、裂け目等を形成する。更に、外科医は、これらの孔或いはチャンネルの内部に目的をもって幾らかの熱損傷を作り出して、椎間板を強化し収縮させる傷の付いた組織を形成する。一実施形態においては、組織を体積的に除去してそこに一つ以上の孔702を形成する際に、医師は電極アセンブリ351を軸方向に移動させて椎間板組織内に入れる(図22も参照のこと)。この孔702は代表的には2mm未満の直径、好ましくは1mm未満の直径を有する。もう一つの実施形態(図示しない)においては、医師は椎間板の外表面を横切って能動電極を移動させ、一つ以上のチャンネルや溝を形成する。本出願人は、本発明は組織内のこのような孔、凹みやチャンネルをここに説明する低温切除技術によって迅速且つ清潔に形成できることを見出した。組織に孔やチャンネルを形成する方法の更に完全な説明は、米国特許第 5683366号に見出されることができ、これの完全な開示はすべての目的のために引用によって本明細書に組み込まれる。
【0137】
図22は、椎間板290に孔702を形成する図15Dのプローブ350の更に詳細な図である。この孔702は前述の方法で形成されることが好ましい。即ち、電流361が能動電極362から導電性流体を介して復帰電極360まで通るように、高周波電圧差が、導電性流体の存在下に能動電極362と復帰電極360との間に印加される。図22に示されたように、これによって椎間板の組織704に電流が全く浸透しないか或いは浅くしか浸透しない。この流体は、目標個所に供給されるか、目標個所に直接付与されるか、或いはプローブの末端がこの処置の前に流体に浸される。この電圧は、能動電極362の周囲の流体を蒸発させるのに充分であり、充分なエネルギを有するプラズマを形成して、組織の分子解離を生じさせる。次にプローブ350の末端は、プラズマによって組織がプローブ350の前方から除去されるにつれて、組織を通って軸方向に前進する。孔702は一般的に、約0.5〜2.5cmの範囲、好ましくは約1.2〜1.8cmの範囲の深さDと、約0.5〜5mmの範囲、好ましくは約1.0〜3.0mmの範囲の直径を有する。勿論、正確な直径は処置に用いられる電気外科用プローブの直径に応じている。
【0138】
各孔702の形成の際に、能動電極362と復帰電極360との間の導電性流体は、一般的に周囲の組織に流れ込む電流を少なくし、それによって組織に対する熱による損傷を小さくする。したがって、孔702の表面705の切断された血管は、電極362が組織を貫通して前進する際に凝固しない。更に、幾つかの処置においては、孔702の表面705を熱的に損傷して組織を強化することが望ましい。これらの理由によって、幾つかの処置においては、孔702の周囲の組織に生じる熱損傷を増大させることが望ましい。図15Dに示された実施形態においては、(1)凝固電極380が椎間板組織704の外表面を少なくとも部分的に過ぎて孔702内に前進した後、プローブ350が孔702からゆっくりと引き抜かれるか(図22に示されているように)、或いは(2)例えば1〜30秒のオーダーの時間で孔702の中にプローブ350を保持することが必要である。凝固電極が組織に接触し或いは隣接すると、電流755が、孔702の周囲の組織を通じて流れ、これに熱損傷を作り出す。凝固電極380と復帰電極360の両者は比較的大きな滑らかな露出表面を有し、これらの表面において高い電流密度を小さくし、これによって孔の表面705に対する損傷を小さくする。一方、これらの電極360と380のサイズと間隔は、組織704に対する比較的深い電流の浸透を可能にする。代表的な実施形態においては、熱による壊死(図示しない)は孔702の表面705から約1.0〜5.0mmまで到達する。この実施形態においては、医師が処置の際に孔702の内部の温度を知っているように、プローブは電源装置28上の一つ以上の温度ディスプレイに接続された一つ以上の温度センサー(図示しない)をプローブ上に含んでいる。
【0139】
他の実施形態においては、孔702が形成された後に、医師は電気外科装置を切除モードから非切除モードもしくは加熱モードに切り換える。これは通常、スイッチやフットペダルを押して、(上述のように)特定の電極形状と、処置に使用される導電性流体とにおける切除に必要なしきい値以下のレベルまで印加電圧を減少させることによって行われる。非切除モードにおいては、次に医師は孔702からプローブ350の末端を引き出す。プローブが引き出されるとき、高周波電流が能動電極362から周囲の組織を経て復帰電極360まで流れる。この電流は組織を加熱し、表面705における切断された血管を凝固させる。
【0140】
もう一つの実施形態においては、本発明の電気外科用プローブは椎間板290の内部の柔らかい組織を切除及び/又は収縮させて、繊維輪292を自己修復させ、この処置の再発生を防ぐのに使用可能である。組織の収縮の場合には、能動電極104と復帰電極112との間に充分な電圧差を印加して、組織温度を正常な体温(例えば37℃)から45〜90℃の範囲、好ましくは60〜70℃の範囲まで上昇させる。この温度上昇は、椎間板の組織の内部のコラーゲン接続繊維を収縮させ、その結果、核髄が繊維輪292内に引き込まれる。
【0141】
本発明による組織の収縮法の一つにおいては、導電性流体が、前述のように目標個所に供給されて充分な温度にまで加熱され、目標組織のコラーゲン繊維の収縮を引き起こす。導電性流体はコラーゲン繊維をほぼ非可逆的に収縮させるのに充分な温度にまで加熱されるが、前記収縮には一般的に約45〜90℃の範囲、通常は約60〜70℃の範囲の組織温度を必要とする。この流体は、導電性流体に接する能動電極に高周波電気エネルギを印加することによって加熱される。能動電極104から出る電流はこの流体を加熱し、加熱された流体のジェット又は噴出流を発生させ、加熱された流体が目標組織へ向かう。加熱された流体は、コラーゲンを、コラーゲン繊維に熱水収縮を起こさせるのに充分な温度にまで上昇させる。復帰電極112は組織個所から電流を引き寄せて、組織への電流の浸透の深さを限定し、それによって分子の解離とコラーゲン組織の破壊を防ぎ、目標組織個所を越えた組織構造の周囲と下側とに対する損傷を少なくし或いは完全に阻止する。例示的実施形態においては、RF電流が、組織内に全く入らないで、導電性流体を通じて復帰電極まで達するように、能動電極104は組織から充分な距離だけ離れて保持される。この実施形態においては、組織にエネルギを付与するための主メカニズムは、電流ではなくて加熱流体である。
【0142】
別の実施形態においては、能動電極104は目標組織に接触するか或いはその近くにあり、電流は選定された深さまで直接に入り込む。この実施形態においては、復帰電極が組織個所から電流を引き寄せて、組織内への電流の浸透深さを限定する。本出願人は、電流の浸透深さは能動電極と復帰電極とに印加される電圧の周波数を変えることによっても、本発明の電気外科装置によって変えられることを見出した。これは、導電性細胞流体を取り囲む細胞膜の電気的特性に依存して、組織の電気インピーダンスが、周波数を増加させることによって減少することが知られていることによる。低い周波数(例えば350kHz 未満)で組織のインピーダンスが高い場合には、(以下に詳述するように)本発明の構成の復帰電極と能動電極の存在は、電流束ラインの浸透を浅くし、組織の加熱を浅い深さに止める。一つの実施形態においては、約100〜200kHz の動作周波数が能動電極に印加されて、コラーゲン収縮の深さを浅く(例えば1.5mm未満、好ましくは0.5mm未満) する。
【0143】
本発明のもう一つの態様によれば、組織を治療するのに採用される能動電極のサイズ(例えば、直径或いは主寸法)は、組織治療の意図した深さによって選ばれる。係属中の特許出願PCT国際出願、U.S.National Phase Serial No. PCT/US94/05168に以前に説明されたように、(電流の周波数、復帰電極の形状等の他の因子が一定に保たれていると仮定した場合)組織への電流浸透の深さは個々の能動電極の寸法の増大と共に大きくなる。電流の浸透の深さ(これは、コラーゲンの収縮、非可逆的壊死等の組織の変化が生じるのに充分な電流密度であるところの深さに関連する)は、本発明の双極形状の場合でかつ約100〜約200kHz の周波数で作動する場合、能動電極の直径のオーダーである。したがって、浅い電流浸透深さを必要とする用途に対しては、寸法の小さい一つ以上の能動電極が選ばれる。逆に、深い電流深さを必要とする用途に対しては、大きな寸法の一つ以上の能動電極が選ばれる。
【0144】
図23〜図25は、膨れたもしくはヘルニアになった椎間板の治療のための、本発明による別の装置と方法を示す。この処置において、電気外科用プローブ800は、経皮的に患者の背部を通じて脊柱に直接導入可能な(たとえば直径約1mm以下のオーダーの)長くて細い針状のシャフト802を具えている。このシャフト802は、医師によって選ばれたアクセス法に応じて可撓性であっても、或いはそうでなくてもよい。プローブのシャフト802は脊柱内部の組織に電気エネルギを付与する一つ以上の能動電極804を含んでいる。このプローブ800は一つ以上の復帰電極806、もしくは分散型パッド(図示しない)として患者の背中に位置決めされる復帰電極を含むことがある。しかし、以下に述べるように、双極型の設計が好ましい。
【0145】
図23に示されているように、シャフト802の末端部分は、目標の椎間板の繊維輪292内に小さな経皮的な孔を通じて前方から挿入されている。このプロセスを円滑に行うために、シャフト802の末端は傾斜して鋭い先端(例えば針)となり、これは次に引っ込めることができて能動電極804を露出させる。代わりに、これらの電極がシャフトの傾斜した先端部分(図示しない)の表面の周囲に形成されてもよい。いずれの実施形態においても、シャフト末端は繊維輪292を通じて、ヘルニアになった、もしくは突出した、もしくは突出していない、もしくは単に膨れた目標の核髄294に供給される。図24に示されているように、高周波電圧が能動電極804と復帰電極806との間に印加され、周囲のコラーゲンを収縮のための適宜な温度(即ち約55〜約70℃)に加熱する。上述のように、この処置は単極モードでも同様に行われてよい。しかし、本出願人は、図23〜図25に示された双極型の形状が高周波電流の制御を円滑にし、このことが脊柱神経を損傷するリスクを減少させることを見出した。
【0146】
図24と図25に示されているように、核髄294が充分に収縮して神経720との接触が解消すると、プローブ800は目標個所から取り出される。代表的な実施形態においては、プローブが繊維輪292を通って引き抜かれるとき、高周波電圧が能動電極804と復帰電極806との間に印加される。この電圧は、繊維輪292内のコラーゲン繊維の収縮を引き起こすのに充分であり、この電圧が、繊維輪292がプローブ800によって形成された孔の周囲で収縮することを可能にし、これによってこの孔の治癒を改善する。こうして、プローブが椎間板から引き出されるとき、プローブ800はそれ自体の通路を密閉する。
【0147】
図26Aは本発明の一実施形態による電気外科用プローブ900の側面図である。このプローブ900は末端部分902aと基端部分902bとを有するシャフト902を含んでいる。能動電極910が末端部分902aに配設されている。図26Aには一つのみの能動電極が示されているが、複数の能動電極を含んだ実施形態も本発明の範囲内にある。プローブ900は、更に、接続ブロック906を収容するハンドル904を含んでおり、この接続ブロック906は、能動電極910等の電極をそれに接続するものである。この接続ブロック906は、プローブ900を電源装置28(図1)等の電力供給ユニットに接続するように構成された複数のピン908を含んでいる。
【0148】
図26Bは図26Aの電気外科用プローブの末端部分の側面図であり、シャフト末端部分902aの詳細を示している。末端部分902aは能動電極910の基端側の絶縁カラーもしくはスペーサ916と、カラー916の基端側の復帰電極918とを含んでいる。第1絶縁スリーブ(図28B)は復帰電極918の下に設けられている。第2絶縁ジャケットもしくはスリーブ920は復帰電極918の基端側に延びている。第2絶縁スリーブ920は隣接する組織への電流の流れを阻止する電気絶縁体として役立つ。現在の所好ましい実施形態においては、プローブ900は、更に第2絶縁スリーブ920から基端側に延びるシールド922を含んでいる。このシールド922はステンレス等の導電性金属で形成されている。このシールド922はプローブ900から患者或いは使用者(例えば外科医)に流れる漏洩電流の量を減らす機能を有する。特に、このシールド922は復帰電極918と導入針928(図31A)との間の静電結合を減少させる。代表的には、シールド922はケーブル、例えばケーブル22、34(図1)の外側浮動導体層もしくはケーブルシールド(図示しない)に接続され、プローブ900を電源装置28に接続している。このようにして、シャフト902の電気容量バランスが乱される。一つの実施形態においては、シールド922は、例えば窒化チタン等の耐久性のある固い化合物で被覆される。このコーティングは、シャフト902が導入針928(例えば図31A、図31B)の内部を軸方向に移動する際に、シールド922と導入内壁932との間の摩擦を低減させるという利点をもたらす。
【0149】
図27Aは、末端部分902aに設けられた第1湾曲部924と第2湾曲部926とを示す電気外科用プローブ900の側面図であり、第2湾曲部926は第1湾曲部924の基部の方に位置している。第1湾曲部924と第2湾曲部926は、直線状(即ち直線又は非湾曲の)或いはほぼ直線状のシャフト902の湾曲部中間部分925によって分離されている。
【0150】
図27Bは、内径Dを有する代表的な導入装置もしくは針928の内部のシャフト末端部分902aの側面図である。このシャフト末端部分902aは、第1湾曲部924と、湾曲部中間部分925とによって分離された第2湾曲部926とを含んでいる。一実施形態においては、シャフト末端部分902aは、基端部分902bから第2湾曲部926の方に延びるほぼ直線状の基端部分901、並びに第1及び第2湾曲部924と926との間の直線状或いはほぼ直線状の湾曲部中間部分925、並びに第1湾曲部924とシャフト902の末端との間の直線状或いはほぼ直線状の末端部909を含んでいる(図27Bにおいては、先端は電極ヘッド911として表されている)。シャフト末端部分902aが導入針928内に配置されると、第1湾曲部924は針928の内面に対して第1角度∀を成し、第2湾曲部926は針928の内面932に対して第2角度∃を成す。(図27Bに示された場合では、針の内面932はシャフト基端部分902b(図27A)の長手方向軸に対して本質的に平行である。)一実施形態においては、シャフト末端部分902aは、シャフト末端部分902aが導入針928に対して軸方向に移動するときに、シャフトの先端が導入針928の中空部内部のほぼ中心の横方向位置を占めるように作られている。したがって、シャフト末端部分902aが針928の末端の開口を通って前進し(図30Bと図31B)、次いで先端開口内に後退する際に、シャフトの先端は常に導入針928の中心の近くの横方向位置を占める(シャフトが導入針928の末端開口を通って前進する際に、たとえ先端がシャフト902と針928の長手方向軸から曲げられたり反らされたりしても)。一つの実施形態においては、シャフト先端部分902aは可撓性を有し、且つシャフト先端部分902aが針928内に導入されたり後退したりする際に、導入針928の内壁932によって加えられる横方向の力の付加によって、シャフト末端部分902aが少なくとも第2湾曲部926の領域において曲がることを必要とする形状を有する。一つの実施形態においては、第1湾曲部924と第2湾曲部926はシャフト902の長手方向軸に対して同じ平面内にあり、これらの第1及び第2湾曲部924と926は反対方向を向いている。
【0151】
図27A〜図27Cに示されたシャフト902のこの「S字湾曲」形状によって、装置の末端もしくは先端を、針末端928aを通じて、末端もしくは先端が導入針928に接触することなく針928の中空部の内部で前進・後退させることが可能となる。したがって、この構成は、敏感なデリケートな構成部材を装置の先端に設置することを可能にし、そこでは末端もしくは先端が比較的固い材料(例えば導入針はステンレスで構成されている)からなる導入装置の中空部を通じて前進あるいは後退させられる。この構成によって、装置の末端もしくは先端に設置された構成部材を比較的柔らかい材料で作ることが可能になり、比較的柔らかい材料で作られた構成部材に損傷を与えるリスクなしに、末端もしくは先端に設置された構成部材が、固い材料からなる導入装置の中を通ることが可能になる。
【0152】
シャフト先端部分902aの「S字湾曲」形状によって、先端(例えば電極ヘッド911)を針928の末端開口の縁と先端との間の接触を避けながら針928の末端開口を通じて前進・後退させることが可能になる。(例えば、もしシャフト末端部分902aが一つの湾曲部のみを含んでいる場合には、この末端は、シャフト902が針928の中空部の中に後退する際に通常は針末端928aに接触するであろう。)好適な実施形態においては、シャフト末端部分902aが針928の内部に押し込まれている場合に、末端部909の長さL2と、この末端部909と針928の内面932との間の角度∀は、図27Bに示されているように、前記先端が実質的に針928の中空部のほぼ中心に位置するように選ばれている。こうして、この長さL2が増加すると、角度∀は減少し、逆もまた真である。長さL2と角度∀の正確な値は、針928の内径D、シャフト末端部分902aの内径d、及びシャフト末端のサイズによって決められる。
【0153】
第1、第2湾曲部924、926の存在が、シャフト902に予め規定された偏りを提供する。それに加えて、一実施形態においては、シャフト末端部分902aは、シャフト末端部分902aが針928の中空部の内部に後退させられたとき、第1湾曲部924と第2湾曲部926の中の少なくとも一方が或る程度圧縮されるように作られている。したがって、湾曲部924と926の少なくとも一方の角度は、末端部分902aが導入針928の末端開口を通じて外に前進した場合には、シャフト末端部分が導入針928の内部に完全に後退した場合の対応する角度と比較して、変化する。例えば、図27Cは、導入針928から自由になった図27Bのシャフト902を示し、ここでは第1、第2湾曲部924と926は、それぞれ、自然な即ち圧縮されない状態の角度∀′と∃′とを採用可能であり、ここで∃′は、典型的には∃に等しいか或いは大きい。角度∀′は角度∀より大きいか、等しいか、或いは小さくてもよい。角度∃′は湾曲部中間部925と基端部分901とが成す角度である。シャフト末端部分902aが導入針928によって拘束されていない場合には、基端部分901はシャフト902の長手方向軸にほぼ一致している。角度∀′は直線状末端部909と基端部分901に平行に描かれたラインとの間の角度である。図を明瞭にするために、電極ヘッド911は図27Cからは省略されている。
【0154】
シャフト902と導入針928とに関して前述した原理は、他の医療装置の範囲にも同じように適用可能である。換言すれば、本発明の「S字型湾曲」形状は、医療器具が導入装置の内部を軸方向に移動又は通過する任意の医療システムや装置の一つの特長として含まれ得る。特に、本発明「S字型湾曲」形状の原理は、この医療器具が導入装置内から前進したり導入装置内に後退する際に、導入装置に接触或いは衝突しないことが望ましい任意の装置に適用することができる。導入装置は、医療器具が通過せしめられる任意の装置である。この医療装置は、例えばカテーテル、カニューレ、内視鏡等を含む。
【0155】
第2湾曲部926が針末端928aに合致する末端に位置する点まで、シャフト902が針の中空部を末端に向かって前進するとき、シャフト先端は針928の長手方向軸から偏る。この偏りの量は角度∃′と∀′との相対的大きさ、及びL1とL2との相対的長さによって決まる。シャフト902がプローブ900の長手方向軸に対して回転すると、次にこの偏り量は電極ヘッド911によって治療される組織に形成されたチャンネル或いは損傷のサイズを(用途に応じて)決める。
【0156】
シャフト902の予め規定された偏りの結果として、シャフト末端部分902aは同じ寸法を有する直線状シャフトより多量の組織に接触する。これに加えて、一実施形態においては、シャフト902の予め規定された偏りは、医師が、針末端928aの軸方向運動とプローブ900のシャフト末端部分902aの固有の湾曲との組み合わせによって、シャフト902の末端を案内或いは操向することを可能にする。
【0157】
シャフト902は約4〜30cmの範囲の長さを有することが好ましい。本発明の一実施態様においては、プローブ900はシャフト902の異なる長さ及び/又は直径を有するサイズの範囲で製造される。次に、患者の身体構造或いは治療対象の組織、及び年齢やサイズに応じて、適宜なサイズのシャフトが外科医によって選ばれる。このようにして、小さい子供から大きな成人に至るサイズの異なる患者に順応させることができる。同様にして、所与のサイズの患者に対して、例えば治療対象の椎間板が腰椎にあるか頸椎にあるかによって、治療対象の器官或いは組織に応じて、外科医によって適宜なサイズのシャフトが選ばれることが可能である。例えば、頸椎の椎間板の治療に適したシャフトは、腰椎の椎間板の治療用のシャフトよりも実質的に小さくてもよい。成人の腰椎の椎間板の治療のためには、シャフト902は約15〜25cmの範囲にあることが好ましい。頸椎の椎間板の治療のためには、シャフト902は約4〜約15cmにあることが好ましい。
【0158】
シャフト902の直径は、約0.5〜約2.5mm、より好ましくは約1〜1.5mmの範囲にあることが好ましい。第1湾曲部924は長さL1で特徴付けられ、一方第2湾曲部926は長さL2で特徴付けられる(図27B)。湾曲部中間部925は長さL3で特徴付けられ、一方、シャフト902は第1湾曲部924から末端の方に長さL4だけ延びている。一つの実施形態においては、L2はL1より大きい。長さL1は約0.5〜約5mmの範囲にあり、一方L2は約1〜約10mmの範囲にある。好ましくは、L3とL4は、それぞれ、約1〜6mmの範囲にある。
【0159】
図28Aは、本発明の一実施形態による能動電極910のヘッド911(後者は図28Aには示されていない)を示す電気外科用プローブ900のシャフト末端部分902aの側面図である。この実施形態においては、電極ヘッド911は頂点スパイク911aと赤道尖頭911bとを含んでいる。電極ヘッド911は、例えば、尖っていない、或いは球状の、或いはほぼ球状の能動電極を有する電気外科用プローブに比べて、多くの利点を示す。特に、電極ヘッド911は頂点スパイク911aと尖頭911bとに高い電流密度を提供する。一方、能動電極の近傍の高い電流密度はプラズマの発生に有利であり、上に詳述したように、能動電極の近傍におけるプラズマの発生は、本発明の或る実施形態による最小限の付随的な熱損傷をもった組織の切除に対して基本的なものである。電極ヘッド911は、以下に詳述するように外科処置の際に、尖頭911bの鋭い縁及び特に頂点スパイク911aの鋭い縁が、ヘッド911の組織内への移動と導入とを円滑にするという点において補助的な利点を提供する。これとは対照的に、角のとれた丸い頂点電極を有する電気外科用プローブは、核髄組織内で既に切除されたチャンネルのような最小の抵抗を有する経路を進むことが多い。本発明のある実施形態は単一の頂点スパイクを有するようにヘッド911を描いているが、能動電極910の頂点部分のための他の形状も本発明の範囲内にある。
【0160】
図28Bはシャフト902の末端部分902aの縦方向断面図である。頂点電極ヘッド911はフィラメント912と連通している。このフィラメント912は、典型的には第一絶縁スリーブ914の中に包まれた導電ワイヤを具備している。第一絶縁スリーブ914は、合成高分子材料のような絶縁材を含んでなるものである。第一絶縁スリーブ914が作られる典型的材料はポリイミドである。第一絶縁スリーブ914は、シャフト902の基端からヘッド911までの全長にわたって延在することがある。絶縁カラーもしくはスペーサ916は、第一絶縁スリーブ914の末端で電極ヘッド911に隣接して配設される。カラー916は、ガラス、セラミック、もしくはシリコン等の材料よりなることが好ましい。第一絶縁スリーブ914の露出部分(即ち、カラー916に近い部分)は、円筒状復帰電極918の中に包まれている。復帰電極918はシャフト902の全長にわたって基端へ延びている。復帰電極918は、ステンレス、タングステン、プラチナもしくはその合金、チタンもしくはその合金、モリブデンもしくはその合金、又はニッケルもしくはその合金等の導電性材料からなる。復帰電極の基端部分は、第二絶縁スリーブ920の中に包まれて、その結果、第二スリーブ920の末端側でかつカラー916の基端側に位置する復帰電極918の露出帯を提供する。第二スリーブ920は、外科的処置の際に外科医によるプローブ900の取り扱いを円滑にするシャフト920の絶縁部分を提供する。第二スリーブ920の基端部分は、導電性シールド922の中に包まれている。第二スリーブ920とシールド922も、基端の方にシャフト902の全長にわたって延びている。
【0161】
図29は、電気外科用プローブ900のシャフト末端部分902aの側面図であり、第1及び第2湾曲部924と926のそれぞれの位置を示している。プローブ900は、図28Aと図28Bを参照して全体的に述べられているように、ヘッド911、カラー916、復帰電極918、第2絶縁スリーブ920、シールド922を含んでいる。図29の実施形態においては、第1湾曲部924は復帰電極918の範囲内に設けられ、一方第2湾曲部926はシールド922の範囲内に設けられている。しかし、本発明の種々の実施形態によれば、シャフト902は、図29にそれぞれ示されている第1及び第2湾曲部924、926以外の、シャフト902の別の或いは追加の位置又は部材に一つ以上の湾曲部を設けることもできる。
【0162】
図30Aは、本発明の一実施形態による、導入針928から遠位側に延びたシャフト902の末端部分902aを示す。この導入針928は、椎間板の核髄等の組織にシャフト902を都合よく導入するのに使用される。この実施形態においては、シャフト902が導入針928を越えて遠位側に延びた場合に、シャフト末端902aの曲率に起因して、ヘッド911が導入針928の長手方向軸から横に変位する。しかし、図30Bに示されているように、シャフト902が導入針928内に後退すると、ヘッド911は、導入針928の中空部930内のほぼ中心の横位置を占める(図31Bも参照のこと)。このようなヘッド911の導入針928の長手方向軸への再整列は、本発明によって行われたように、シャフト末端902aの曲率の特別な構成によって得られる。このように、シャフト末端902aの種々の部品(例えば電極ヘッド911、カラー916、復帰電極918)の接触が防がれ、それによって導入針928内におけるシャフト902の前進と後退が円滑になるのみならず、シャフト902の繊細な構成部品への損傷の潜在的原因を回避することができる。
【0163】
図31Aは、導入針928からの或いは導入針928の中への電極ヘッド911の前進もしくは後退の際の導入針928の内壁932に対するシャフト902の側面図を示す。シャフト902は、ヘッド911が導入針末端928aに隣接した状態で、導入針928の内部に位置決めされる(図31B)。これらの条件の下で、シャフト902の曲率は、シャフト末端902aを強制的に、例えば第2湾曲部926の位置で導入針の内壁932に接触させる。それでもなお、シャフト902の全体の曲率及び特に第1湾曲部924(図27A及び図27B)の性質と位置とに起因して、ヘッド911は導入針末端928aとは接触しない。
【0164】
図31Bは、シャフト902の前進或いは後退の際の位置における、導入針928に対する電極ヘッド911の端面図を示し、ここではヘッド911が導入針末端928aに隣接している(図30B及び図31B)。この状況において、ヘッド911は、導入針928の内部の中空部930のほぼ中心に位置している。したがって、ヘッド911と導入針928との間の接触が避けられ、シャフト末端902aが、シャフト902に損傷を与えることなく、前進と後退を繰り返すことが可能となる。
【0165】
図32Aは電気外科用プローブ900のシャフト基端部分902bを示し、ここでシャフト902は複数の深さマーク903を含んでいる(図32Aに903a〜903fで示されている)。他の実施形態においては、深さマーク903のその他の番号と配列がシャフト902に設けられている。例えば、或る実施形態においては、深さマークがシールド922の全長に沿って存在し、或いは一つの深さマーク903がシャフト基端部分902bに存在する。深さマークは、外科的処置の際に外科医に患者の組織、器官、人体へのシャフト902の侵入深さを示すのに役立つ。深さマーク903はシールド922の中或いは上に直接に形成され、そしてシールド922と同じ材料で構成されている。代わりに、深さマーク903がシールド922とは別の材料で形成されてもよい。例えば、深さマークは、シールド922の材料と比較して異なる色及び/又は異なるX線不透過性のレベルを有する材料で形成されてもよい。例えば、深さマークは、シールド922のそれとは異なるX線不透過性のレベルを有する、タングステン、金、或いは酸化プラチナ(黒)等の金属で構成されてもよい。外科医は、そのような深さマークをX線透視検査によって行われる処置の際に見ることができる。一実施形態において、導入針及びシャフト902の長さは、導入針末端を越えるシャフトの領域を制限するように選ばれる。
【0166】
図32Bはプローブ900を示し、ここでシャフト902は機械的ストッパ905を含んでいる。この機械的ストッパ905はシャフト基端部分902bに好適に位置決めされている。機械的ストッパ905は、導入針928の基端928bと機械的接触をすることによって、導入針928を通ってシャフト末端902aが前進できる距離を制限する。機械的ストッパ905は、シャフト902に固定或いは一体化された剛性材料である。機械的ストッパ905は、シャフト末端902aが導入針928を通って前進する深さ或いは距離、及び患者の組織、器官或いは体内へ進入する程度を監視するのにも役立つ。一実施形態においては、機械的ストッパ905はシャフト902上を動くことができ、又このストッパ905は、ストッパ905の位置を調節してシャフト902上の選ばれた位置にストッパ905をロックするためのストッパ調節ユニット907を含んでいる。
【0167】
図33は、本発明の一実施形態によるシャフト902の能動電極910の製造段階を示す。段階33-Iは、技術的に公知の金属ワイヤ等の導電性材料912′の細長い一片を示す。材料912′は、第1端912′aと第2端912′bとを含んでいる。段階33-II は、第1端912′aからの球状構造911′の形成を示し、ここで球状構造911′がフィラメント912に付加される。この球状構造911′は第1端912′aに熱を付与することによってうまく形成される。金属ワイヤの端に熱を付与するための技術は、周知である。段階33-IIIは、球状構造911′からの電極ヘッド911の形成を示し、ここで能動電極910は、ヘッド911とこのヘッド911に付加されたフィラメント912とを具えている。この特別な実施形態においては、ヘッド911は頂点スパイク9111aとほぼ赤道の尖頭911bとを含んでいる。
【0168】
図34は本発明の一実施形態によるシャフトを作る方法に含まれる一連の段階を模式的に表しており、ここで、段階1000はフィラメントを有する能動電極を提供する段階であり、この能動電極はフィラメントに付加された電極ヘッドを含んでいる。段階1000で提供される例示的能動電極は、図33を参照して述べられたタイプの電極である。この段階(段階1000)では、フィラメントは引き続く接続ブロック(図26A)への接続のために適宜な長さに切断される。
【0169】
段階1002は、ポリイミド等の合成高分子又はプラスチック等の電気絶縁性材料の第1絶縁スリーブによるフィラメントの被覆或いは封入を含んでいる。第1絶縁スリーブはシャフトの全長にわたって延びていることが好ましい。段階1004は電気絶縁性材料のカラーを第1絶縁スリーブの末端に位置決めする段階を含み、ここでカラーは電極ヘッドに隣接して位置決めされる。このカラーはガラス、セラミック、又はシリコーン等の材料であることが好ましい。段階1006は、第1絶縁スリーブの上に円筒状復帰電極を設置する段階を含む。復帰電極はその末端がカラーの基端に接するように位置決めされることが好ましく、復帰電極は基端側にシャフトの全長まで延びていることが好ましい。復帰電極はステンレスその他の非腐食性の導電性金属で構成される。
【0170】
一実施形態によれば、金属製の円筒状復帰電極はその末端領域内に湾曲部を具えるように予め曲げられる(即ち、復帰電極構成材はシャフト上に組み付けられる以前に曲げられている)。その結果、シャフトは、復帰電極を第1絶縁スリーブ上に取り付けると第1湾曲部の形態を呈し、即ちシャフトの第1湾曲部が、復帰電極を曲げることによって得られる。段階1008は、復帰電極の帯が第2絶縁スリーブの末端の先に露出するように、復帰電極の一部を第2絶縁層或いはスリーブによって被覆する段階を含む。一実施形態においては、第2絶縁スリーブは、この第2絶縁スリーブを復帰電極の上に位置決めする前に加熱される熱収縮性プラスチック材料からなる。一実施形態によれば、第2絶縁スリーブが最初にシャフトの全長にわたって載せられ、その後、第2絶縁スリーブの末端が切断されて適宜な長さの復帰電極を露出させる。段階1010は、前述のようにステンレスその他の金属の円筒等の導電性材料のシールドの内部に第2絶縁スリーブの基端側部分を封入する段階を含んでいる。
【0171】
図35は、本発明の電気外科用プローブを製造する方法に含まれる一連の段階を模式的に表しており、ここで段階1100は、少なくとも一つの能動電極と少なくとも一つの復帰電極とを有するシャフトを提供する段階を含む。段階1100で提供される例示のシャフトは、図34を参照して前述した方法によって準備されるもので、即ち、このシャフトは第1湾曲部を含んでいる。段階1102はシャフトを曲げて第2湾曲部を形成する段階を含む。好ましくは、第2湾曲部はシャフト末端部分であるが第1湾曲部の基部側に位置決めされる。一実施形態においては、第2湾曲部は第1湾曲部よりも大きい。(第1、第2湾曲部の両者の特徴は、例えば図27Bを参照して前述されている。)段階1104はプローブのためのハンドルを提供する段階を含む。このハンドルは、接続ブロックを含んでおり、この接続ブロックは、電極をこれに電気的に接続させるためのものである。段階1106は、シャフトの能動電極と復帰電極とを接続ブロックに接続する段階を含む。この接続ブロックによって、電気外科用プローブをうまく電源装置(例えば図1の電源装置28)に接続することが可能になる。その後、段階1108はシャフトをハンドルに固定する段階を含む。
【0172】
図36Aは、正常な椎間板290を脊髄720との関係で模式的に表したものであり、椎間板は、内部核髄294を包み込んだ外側繊維輪292を有している。核髄は、より固くより繊維状の繊維輪に比べて、蛋白質からなる比較的柔らかい組織であって、比較的高い水分量を有している。図36B〜図36Dは、それぞれ、不整を有する椎間板を模式的に表しており、前記不整は、例えば変形した繊維輪による神経根の圧迫等に起因する痛みを生じさせる可能性のあるものである。即ち、図36Bは、核髄の突出とそれに伴う繊維輪の変形を示す椎間板を模式的に表している。図38Bに描かれた状態は、内包的ヘルニアを明らかに表し、これによって激しい消耗性の痛みをもたらす。図36Cは、これも繊維輪の変形に伴う繊維輪の内部の複数の裂け目を示す椎間板を模式的に表している。このような繊維輪の裂け目は、核髄によって繊維輪上に加えられる過剰な圧力によって生じる。核髄内の過剰な圧力は、こうした裂け目の存在に関連した椎間板の不整を大きくする傾向を有する。図36Dは、核髄の分裂とこれに関連する繊維輪の変形とを示す椎間板を模式的に表している。この場合、核髄の迷走破片294′は、やがて脱水によってサイズが小さくなる傾向があり、しばしば長期間(例えば数カ月)にわたって低下する椎間板起因の痛みをもたらす。図を明瞭にするために、各図36B、図36C及び図36Dは一つだけの不整を示している。しかし、実際には、描かれた一つ以上の不整が同じ椎間板で生じることがある。
【0173】
多くの患者は、図36B〜図36Dに描かれたタイプの状態に起因する椎間板起因の痛みに悩んでいる。しかし、僅かな割合の患者のみが、椎弓切除術や椎間板切除術を受けている。現在のところ、椎間板の種々の不整や異常に起因する著しい障害に耐えていながら結局のところ大規模な脊柱手術を受けない大勢の患者のための中間治療が必要である。椎間板の共通的な不整は、核髄が繊維輪を破らないが、椎間板の突起が、露出している神経根を圧迫して神経根の痛みをもたらす内包的ヘルニアである。典型的な症状は座骨神経痛と共に生ずる足の痛みである。そのような神経根の痛みは、椎間板起因の痛みの特別な形態とみなされてよい。最も一般的には、神経根の痛みをもたらす内包的ヘルニアは腰椎に関連し、特に、L4-5或いはL5-S1のいずれかにおける椎間板に関連している。種々の椎間板異常は頸椎においても生じる。本発明の方法と装置は、頸椎と腰椎とを含む脊椎のすべてのセグメントに適用可能である。
【0174】
図37は、繊維輪に少なくとも一つの裂け目を有する椎間板の核髄内に挿入されたプローブ900のシャフト902を模式的に表している。シャフト902は、最小の侵襲的経皮処置の方法で導入針928を介して核髄内にうまく挿入される。好適な実施形態において、腰椎の椎間板は後側方からアクセスできるが、他のアクセス方法も可能であり、そして本発明の範囲に含まれる。処置に使用されるシャフト902及び導入針928の好ましい長さと直径は、脊椎の領域(例えば腰又は頸)、もしくはその他の治療対象の身体領域、及び患者のサイズ等を含む多くの因子に応じて決まる。シャフト902の好ましい範囲は本明細書中の別のところで与えられる。腰椎の椎間板の治療の一実施形態においては、導入針928は17ゲージの針の内径の約50〜150%の範囲の直径を有することが好ましい。頸椎の椎間板の治療のための実施形態においては、導入針928は、20ゲージの針の内径の約50〜150%の範囲直径を有することが好ましい。
【0175】
シャフト902は前述のように能動電極910を含んでいる。シャフト902は、図27A〜図27Bを参照して述べたように、末端902a/902′aにおける湾曲部に特徴を有する。シャフト902を約180°回転させることによって、シャフト末端902aは、点線で示された902′aと名付けられた位置に動かされる。その後、シャフト902は更に180°回転させられ、斜線領域(902aと902′aの間に示されている)として表されている基端側円錐領域を有するほぼ円筒状の三次元空間を形成する。能動電極910の末端側の二方向矢印は、シャフト902の長手方向軸にほぼ沿うシャフト902の移動を示す。シャフト902の軸方向運動及び回転運動の組み合わせによって、直線状(非湾曲)シャフトを有する対応するプローブに比べて、更に大きい容積の核髄が電極910に接触できる。更に、シャフト902が湾曲していることによって、外科医は適宜な回転によってシャフト902の前進方向を変えて、シャフト末端902aを核髄内部の特定目標箇所に案内することができる。
【0176】
本発明の或る実施形態によれば、シャフト902の曲率は、それが外科処置に使用される前と、例えば椎間板内部の処置の際に切除を行う間の両方において同一であるか又はほぼ同一であることが理解されるべきである。(この声明に対する一つの明らかな例外は、導入針928の内部にシャフト902を収納し或いは通す際に、シャフト902が導入針の内壁932の拘束によって更に幾らか直線状に一時的に「成形」されるところの処置における段階、を指す。)これとは逆に、或る先行技術の装置、及び以下に述べられる本発明の実施形態は(例えば、図43A、43B参照)、直線状であるか、或いは使用前の自然に形成された形状をもたないものであり、外科処置の際に選択された形状になるように導かれる。
【0177】
シャフト末端902aが、核髄内部の目標箇所にあるか或いはそれに隣接している場合、プローブ900は能動電極910と復帰電極918(例えば図26B)との間に第1高周波電圧を印加することによって組織を切除するのに用いられ、ここで核髄の容積は削減され、核髄によって繊維輪に作用する圧力が減少し、少なくとも一つの神経或いは神経根が減圧される。したがって、患者が経験する椎間板起因の痛みが緩和される。好ましくは、第1高周波電圧の印加によって能動電極910の近傍においてプラズマが形成され、そしてこのプラズマが、高分子量の椎間板組織物質(例えば蛋白質)を低分子量のガス物質に分解することによる切除を引き起こす。この低分子量気体物質は、シャフト902と導入針928とを引き抜く際に、例えばピストン作用等によって椎間板と導入針928とシャフト902との間の間隙を通じて、椎間板から少なくとも部分的に排気される。これに加えて、本技術分野では周知のように、組織の切除の副産物が吸い出し装置(図37には示されていない)によって除去される。このようにして、核髄の容積及び/又は質量が削減される。
【0178】
プラズマを能動電極910の近傍で発生及び/又は維持するために、一定量の導電性流体がシャフト902及び/又は切除対象の組織に付与される。この導電性流体は、第1高周波電圧を印加する前又は印加する際のいずれかの時期に、シャフト902及び/又は切除対象の組織に付与される。導電性流体の例は塩水(例えば等張塩水)及び導電性ゲルである。導電性流体は、切除の前又は切除の際に切除対象の組織に付与される。流体供給ユニット或いは装置は、電気外科用プローブ自体の構成部品であるか、或いは補助装置940(図41)等の別の装置からなる。代わりに、切除されるべき箇所の多くの体液及び/又は組織(核髄や血液等)が、導電性であり、そして能動電極の近傍でのプラズマの発生或いは維持に関与することがある。
【0179】
一実施形態においては、第1高周波電圧の印加と核髄内への空洞或いはチャンネルの形成とによって核髄組織を切除した後、第2高周波電圧が能動電極910と復帰電極918との間に印加され、そこでは第2高周波電圧の印加が前記空洞或いはチャンネルに隣接する核髄組織を凝固させる。このような核髄組織の凝固は、椎間板起因の苦痛を少なくすることに付随して、核髄の特定領域内の固さ、強度及び/又は剛性を増加させる。更に、組織の凝固は組織を壊死させ、引き続いて自然の身体的プロセスの一部として破壊され、身体から排出され、それによって椎間板の減量をもたらす。図37は繊維輪内に裂け目を有する椎間板を描いているが、図37を参照して説明した本発明の装置と方法は、図36Bと36Dを参照して述べられた椎間板の不整を含む他のタイプの椎間板の不整の治療にも適用可能である。
【0180】
図38は椎間板内の電気外科用プローブ900のシャフト902を示し、ここでシャフト末端902aは椎間板内部の特定箇所に目標を定めている。図38に描かれている状況では、目標箇所は核髄組織の迷走破片294′によって占められている。シャフト末端902は、能動電極910が破片294′の近傍に来るように、導入針928を適切に位置決めすることによって、少なくともある程度は、案内或いは方向付けされる。好ましくは、能動電極910は破片294′に隣接するか又は接触する。図38は、核髄の破片がシャフト902によって目標付けられた椎間板を描いているが、図38を参照して述べられる本発明は、繊維輪の裂け目及び内包的ヘルニアを含む、椎間板内部の他の異常構造を対象とするためにも使用される。現在のところ好ましい実施形態においては、シャフト902は、少なくとも一つの湾曲部(図38には示されていない)、及び図26A〜図35を参照して説明したその他の特長を含んでおり、そこではシャフト末端902aはシャフト902の軸方向運動と回転方向運動の適宜な組み合わせによって精密に案内される。図38に示された処置は、一般的に図37を参照して述べられた説明に準じて実行される。即ち、シャフト902が経皮的処置により導入針928を介して椎間板に導入される。シャフト末端902aが目標箇所に案内された後、その箇所にある或いはその隣にある組織は第1高周波電圧の印加によって切除される。その後で、治療対象の椎間板の特別な条件に応じて、第2の高周波電圧が随意的に印加され、椎間板の内部の組織を局部的に凝固させる。
【0181】
図39は、本発明による椎間板組織の切除方法に含まれる一連の段階を模式的に表しており、段階1200では導入針を治療対象の椎間板の方に前進させる段階を含んでいる。導入針は、シャフト末端の直径よりも大きい直径の中空部を有し、これによって、シャフト末端が導入針の中空部を自由に通過することができる。一実施形態においては、導入針は好ましくは約3〜約25cmの範囲の長さを有し、導入針の中空部は好ましくは約0.5cm〜約2.5mmの範囲の直径を有している。好ましくは、導入針の中空部はシャフト末端の直径の約105〜約500%の範囲の直径を有している。導入針は経皮的に、例えば後部の横からの接近によって椎間板に挿入される。一実施形態においては、導入針は本技術分野では周知の硬膜針の寸法と似た寸法を有している。
【0182】
選択的な段階1202は、塩水等の導電性流体を椎間板に導入する段階を含んでいる。一実施形態においては、段階1202の代わりに切除処置が核髄自体の導電性に依拠することがある。段階1204は電気外科用プローブのシャフトを、例えば導入針を通じて椎間板の内部に挿入する段階を含み、ここでシャフト末端部分は能動電極と復帰電極とを支える。一実施形態においては、シャフトは、図26A〜図32を参照して説明された、外側シールド、該シャフト末端部分の第1及び第2湾曲部、及び先端スパイクを有する電極ヘッドを含んでいる。
【0183】
段階1206は、能動電極と復帰電極との間に第1高周波電圧を印加することによって、椎間板の組織の少なくとも一部を切除する段階を含む。特に、本発明の方法による核髄組織の切除は、核髄の容積を減らすのに役立ち、それによって繊維輪に作用する圧力を緩和し、同時に以前から圧迫されていた神経根を減圧し、そして椎間板起因の痛みを軽減する。
【0184】
一実施形態においては、導入針は、それが繊維輪を貫いて核髄に入るまで椎間板の方に前進させられる。シャフト末端は核髄に導入され、核髄の一部が切除される。これら及びその他の処置段階はX線透視検査の下で行われ、椎間板の核髄に対する導入針及びシャフトの相対位置を見ることができる。これに加えて或いはこれとは別に、外科医は椎間板の第1側面から核髄内に導入針を導入し、次に、電気外科用プローブの軸方向移動に対する抵抗が外科医に感じられるまでシャフト末端を核髄を通して前進させる。外科医はこの抵抗によって、シャフト末端が椎間板の反対側の繊維輪に接触したことを判断する。次に外科医は、シャフト上の深さマーク(図32A)を利用して、核髄に対して所望の位置にシャフト末端を位置決めするためにシャフトを一定の距離だけ後退させることができる。シャフト末端が適宜に位置決めされると、高周波電圧が電力供給ユニットを介してプローブに印加される。
【0185】
段階1206の後の随意の段階1208は、椎間板組織の少なくとも一部を凝固させる段階を含む。一実施形態においては、段階1206によって、核髄の内部にチャンネル或いは空洞が形成される。その後、チャンネルの表面の組織が段階1208において凝固させられる。椎間板組織の凝固は、前述したように第2高周波電圧の印加によって行われてもよい。段階1206或いは段階1208の後に、シャフト末端が核髄の新たな組織に接触するようにシャフトは動かされる(段階1210)。シャフトは軸方向に動かされ(即ち、その長手方向軸の方向に動かされ)、その長手方向軸を中心に回転させられ、或いは軸方向運動と回転運動との組み合わせによって動かされる。後者の場合、シャフト末端によってほぼ螺旋状の経路が形成される。段階1210の後に、シャフト末端が接触した核髄の新たな組織に対して、段階1206と1208が繰り返されてもよい。代わりに、段階1206或いは段階1208の後に、シャフトが椎間板から引き抜かれることがある(段階1212)。段階1214は椎間板からの導入針の引き抜き段階を含んでいる。一実施形態においては、シャフトと針とが椎間板から同時に引き抜かれてもよい。椎間板からシャフトを引き抜くことによって、切除による副産物の椎間板からの排出が促進される。このような切除による副産物は、前述のように、椎間板組織の分子解離によってもたらされた低分子量の気体状化合物を含む。上述の方法は、 Coblation(登録商標)及び/又は椎間板組織の凝固が必要とされる、内包的ヘルニアを含む任意の椎間板不整の治療に使用できる。一実施形態においては、導入針が一般的に段階1200の場合に述べられたように導入され、X線透視検査用流体が導入針の中空部を通じて導入され、椎間板の異常或いは不整の可視的な診断のために使用される。その後、診断の結果に応じて、例えば段階1202から1214による治療処置が、アクセスに用いたのと同じ導入針を使用して行われる。一実施形態においては、導入針の末端部分或いは全長は、その外表面に絶縁コーティングを有している。導入針のこの絶縁コーティングは導電性導入針とプローブ上の電極との干渉を防ぐ。
【0186】
シャフトの単一の直線的な組織の通過によって、切除対象の組織に形成された空洞或いはチャンネルのサイズは、シャフトの直径(例えばシャフト末端及び能動電極の直径)とシャフトの軸方向移動量との関数である。(シャフトの「単一の直線的な通過」とは、オンにした状態の電源装置からの電力によって、シャフトの長手方向軸を中心とする回転を行うことなく、シャフトを組織の末端に向かって1回だけ軸方向に移動させることを意味する。)本発明の種々の実施形態による湾曲したシャフトの場合、シャフトが組織を通して前進させられるとき、シャフトの回転によって大きなチャンネルが形成可能である。組織を通るシャフトの単一回転通過によって、切除対象の組織に形成されるチャンネルのサイズは、シャフトの偏り、シャフトの長手方向軸を中心とするシャフトの回転量、並びにシャフトの直径(例えば、シャフト末端と能動電極の直径)及びシャフトの軸方向の移動量の関数である。(シャフトの「単一回転通過」とは、オンにした状態の電源装置からの電力によって、シャフトの長手方向軸を中心とする回転を行いながら、シャフトを組織の末端に向かって1回だけ軸方向に移動させることを意味する。)シャフトが組織を回転通過する際に形成されるチャンネルの直径は、シャフトの回転量によって大幅に制御可能であり、ここで「回転量」とは、回転速度(例えばシャフトの角速度)及び軸方向移動の単位長さ当たりにシャフトが回転する角度(例えば回転数)の両方を含む。典型的には、本発明によれば、一回の通過当たりの軸方向の移動量(直線的通過或いは回転通過のいずれにおいても)はシャフトの長さによって制限されない。その代わり、一回の通過当たりの軸方向移動量は切除対象の組織のサイズによって決められることが好ましい。椎間板その他の治療対象組織のサイズ、及び治療の性質等に応じて、本発明のプローブによって形成されるチャンネルは約2〜約50mmの範囲の長さと、約0.5〜約7.5mmの範囲の直径とを有していることが好ましい。これと比較して、単一回転通過の際に本発明のシャフトによって形成されるチャンネルは、約1.5〜約25mmの範囲の直径を有していることが好ましい。
【0187】
単一直線通過の際に本発明のシャフトによって形成されるチャンネルは、約1mm3 以下〜約2500mm3 の範囲の容積を有することが好ましい。更に好ましくは、本発明のシャフトの直線通過によって形成されるチャンネルは約10mm3 〜約2500mm3 の範囲、更に好ましくは約50mm3 〜約2500mm3 の範囲の容積を有している。これと比較して、単一回転通過の際に本発明のシャフトによって形成されるチャンネルは、典型的には単一回転通過の際に形成される同じ長さのチャンネルの容積の約2倍〜約15倍の容積、即ち約2mm3 〜約4000mm3 の範囲、更に好ましくは約50mm3 〜約2000mm3 の範囲の容積を有している。理論的に解明されている訳ではないが、一つ以上のチャンネルを有する椎間板の容積の減少は、一つ以上のチャンネルの全容積の関数である。図40は、電気外科用プローブのシャフト末端を、特別に目標とされた椎間板の組織の切除のために、椎間板の内部の目標箇所まで案内する方法に含まれる一連の段階を模式的に表しており、ここで段階1300と1302は、図39の段階1200と1204と同等である。その後の段階1304は、椎間板内部で明確にされた領域にシャフト末端を案内する段階を含む。特定の目標箇所は、椎間板とその異常を見えるようにする前処置、例えばX線検査、内視鏡的或いは透視的方法の結果として予め明確にされている。一例として、椎間板内部で明確にされた目標箇所は、椎間板起因の痛みをもたらす繊維輪中を迷走する核髄の破片(例えば図36Dを参照)を含んでいる。しかし、他のタイプの椎間板の不整に関連して明確にされた箇所へシャフトを案内することも、可能であり、そして本発明の範囲に含まれる。
【0188】
明確にされた目標箇所へのシャフト末端の案内は、前述したように軸方向及び/又は回転方向への湾曲シャフトの運動によって行われる。或いは、例えば本技術分野では周知のようにシャフトがガイドワイヤによって操向可能である。シャフト末端の案内は、椎間板に対するシャフトの位置を可視化して行われ、ここで可視化は内視鏡やX線透視法によって行われる。内視鏡による診察は光ファイバケーブル(図示しない)を用いる。光ファイバケーブルは電気外科用プローブと一体化されるか、或いは別個の機器(内視鏡)の一部となっている。段階1306は椎間板の組織の切除段階を含み、段階1206(図39)と同等である。段階1306の前或いはその際に、導電性流体が椎間板の組織及び/又はシャフトに付与され、シャフト上の能動電極と復帰電極との間の電流経路を提供し、且つシャフト末端部分の近傍にプラズマを発生させ易くし及び/又は維持する。シャフト末端が目標箇所に案内され、そこの組織が切除された後、シャフトは例えば核髄の同じ領域内で局部的に動かされ、或いは同じ椎間板内の第2の目標箇所まで動かされる。シャフト末端は、前述の通り(例えば図39の段階1210を参照のこと)動かされる。あるいは別の実施形態によれば、シャフトは本技術分野で周知の技術によって操向されることが可能である。段階1310と1312は、それぞれ、段階1212と1214と同等である(図39参照)。
【0189】
硬膜ステロイドの注射が神経根の周囲炎を一時的に消失させて、椎間板起因の痛みを緩和することは本技術分野では知られている。本発明の一実施形態においては、前述の椎間板組織の切除方法が、好都合に、硬膜ステロイドの注射と連携して行われる。例えば、椎間板組織の切除と硬膜注射とは、同じ外科医によって両方の処置に共通の装置(例えば可視化装置)を使って、一つの処置の一部として行われる。単一の処置における Coblation(登録商標)と硬膜注射との組み合わせによって、医療関連事業の実質的なコスト節約、及び患者治療の著しい改善が可能となる。
【0190】
以上述べたように、本発明の方法と装置は、裂け目及び/又は内包的ヘルニアを有する椎間板の治療プロセスを加速するのに使用可能である。一方法においては、本発明は、例えば腰椎の椎間板切除による神経根の減圧のための顕微内視鏡的椎間板切除術処置に有用である。例えば、図18〜図20に関連して前述したように、上層にアクセスできるように患者の背中に経皮的な穿孔が行われる。典型的には、最初に小さい針が使用されて椎間板の空間位置を突きとめ、そしてガイドワイヤが挿入され、側方透視検査の下で上層の下縁まで前進する。引き続いてカニューレ式拡張器がガイドワイヤの上に挿入されて、互いに切開箇所から上層までの孔を準備する。第1の拡張器は、上層を「触診」して、棘状突起と上層の下縁の真上の小関節面複合体との間で前記拡張器先端の正しい位置を確認するのに使用される。次にチューブ状牽引子が最大の拡張器の上から通されて上層まで達する。次に、拡張器が取り除かれ、チューブ状牽引子内に手術用回廊が確立される。しかし、他の在来のもしくは適当な方法を用いて目標とする椎間板にアクセスすることも可能なことを認識すべきである。目標とする椎間板にアクセスすると、導入装置が椎間板の中に挿入される。
【0191】
図41を参照すると、一実施形態において、導入針928と第2のもしくは補助の導入装置938の両方は、同じ椎間板の中に挿入されて、補助装置940が補助導入装置938を介して目標の椎間板内に導入されることを可能にする。補助装置940は、例えば流体供給装置、復帰電極、吸い出し中空部、第2電気外科用プローブ、或いは光ファイバ部品を有する内視鏡を含んでなるものである。導入針928と補助導入装置938のそれぞれは、各導入装置928と938の少なくとも末端部分が核髄の中に位置決めされるまで、繊維輪を貫通して前進させられる。その後、電気外科用プローブ900′のシャフト902″が、少なくとも一つの導入装置928、938を通して挿入され、椎間板を治療する。典型的には、プローブ900′のシャフト902″の外径は約2.31mm(7French)(1Frは0.33 mm)よりは長くなく、好ましくは約1.98〜2.31mm(6〜7French)である。
【0192】
電気外科用プローブ900を椎間板に挿入する前に、導電性流体が流体供給アセンブリ(例えば補助装置940)を経て椎間板に供給され、次にプローブ900′を介して高周波電圧を印加することによって椎間板内の Coblation(登録商標)メカニズムを円滑にし或いは促進する。流体の供給のための別の装置(940)を設けることによって、電気外科用プローブ900′の寸法を最小に保つことができる。更に、流体供給アセンブリが補助導入装置938内に位置決めされると、処置中の任意の所与の時期に導電性流体が椎間板の内部に都合よく補給され得る。そうでない他の実施形態では、流体供給アセンブリは電気外科用プローブ900′に物理的に接続される。
【0193】
幾つかの方法においては、X線不透過性の造影剤(図示しない)が流体供給アセンブリを通じて供給され、外科医がX線透視検査の下で椎間板を見ることを可能にする。幾つかの形状において、追跡装置942はシャフト末端部分902″aに位置決め可能である。補助的に或いは代わりに、シャフト902″は、例えば深さマーク903によって順次にマークを付けられ、外科医に能動電極がどの位椎間板の中に前進したかを示すことができる。一実施形態においては、追跡装置942はX線透過検査の下で可視化可能なX線不透過性物質を含んでいる。この追跡装置942と深さマーク903とは、能動電極910が案内されるべき椎間板内の特定の目標箇所に対する能動電極910の位置を追跡する手段を外科医に提供する。そのような特定の目標箇所は、例えば繊維輪の裂け目、内包的ヘルニア、或いは核髄の破片等を含んでいる。外科医は、深さマーク903を観察することによって、或いは追跡装置の出力と椎間板のX線画像とを目標の椎間板の手術前のX線画像と比較することによって、能動電極910の位置を決めることができる。
【0194】
他の実施形態においては、光ファイバ(図示しない)が椎間板に導入される。この光ファイバはプローブ900′と一体化されるか、或いは補助導入装置938を介して補助装置940の一部として導入されてもよい。このようにして、外科医は椎間板の内部と能動電極910の位置とを目視によって監視することができる。
【0195】
外科医は、電気外科用プローブ900′の末端位置を監視することに加えて、プローブが Coblation(登録商標)モードにあるかどうかも監視できる。大部分の実施形態において、電源装置28(例えば図1)は、プローブ900′が椎間板の中にプラズマを発生しているかどうかを示すために、光、音、液晶ディスプレイ(LED)等のインジケータを有するコントローラを含んでいる。(例えば椎間板内の導電性流体が不充分なことに起因して) Coblation(登録商標)メカニズムが生じていないことが確定した場合には、外科医は椎間板に対して導電性流体を補充することができる。
【0196】
図42は、末端部分902″aに設置された追跡装置942を有するシャフト902″を含んだ電気外科用プローブ900′の側面図である。追跡装置942は、椎間板の中で末端部分902″aを案内するようにされたX線不透過性マークとして役立つことがある。シャフト902″は末端部分902″aに設けられた少なくとも一つの能動電極910も含んでいる。好ましくは、能動電極910を少なくとも一つの復帰電極から絶縁するため、電気絶縁支持部材或いはカラー916が能動電極910の基端側に位置決めされる。多くの実施形態において、復帰電極918は、シャフト902″の末端部分の能動電極910の基端側に位置決めされている。しかし、他の実施形態では、復帰電極918がシャフト902″から省略されることがあり、その場合には少なくとも一つの復帰電極が補助装置940に設けられるか、或いは復帰電極が患者の身体上に分散型パッド(図示しない)として位置決めされる。
【0197】
能動電極910は図42には単一の頂点電極を具えているように示されているが、能動電極910のその他の数、配置、形状も本発明の範囲内である。例えば、能動電極910は、種々の形状の複数の独立した電極を含むことがある。能動電極910は、通常、電流密度が能動電極910において復帰電極918よりもはるかに高くなるように、復帰電極918より小さな露出表面積を有するであろう。好ましくは、復帰電極918の近傍における電流密度が小さくなるように、復帰電極918はシャフト902″の周囲に延在する比較的大きな滑らかな表面を有し、それによって目標ではない組織に対する損傷を少なくする。
【0198】
高周波エネルギの双極型供給は核髄を縮小する好ましい方法であるが、核髄を縮小させるために、他のエネルギ源(即ち抵抗型その他)を使用することができ、又エネルギが他の方法(即ち単極型、導体型その他)によって供給され得ることが理解されるべきである。
【0199】
図43Aは、本発明の別の実施形態による、シャフト952を含んだ操向可能な電気外科用プローブ950を示している。好ましくは、シャフト952は可撓性を有し、図示のようにほぼ直線状の形状をとり得る。プローブ950は、ハンドル904、シャフト末端952a、能動電極910、絶縁カラー916、及び復帰電極918を含んでいる。図43Bに見られるように、或る状況の下では、例えば処置中にプローブ950を案内或いは操向する際に、シャフト952に力を付与すると、シャフト末端952aは、符号952′aの非直線状形状を呈する。シャフト末端952′aの変形可能な性質は、能動電極910が椎間板内の特定の目標箇所まで案内されることを可能にする。
【0200】
図44は椎間板の核髄の中に挿入された操向可能な電気外科用プローブ950を示す。補助装置940と補助導入装置928も同じ椎間板の核髄の中に挿入されている。内包的ヘルニアに隣接する核髄の縮小を円滑に行うために、シャフト952(図43A)は符号952′で示された非直線状形状になるように操作される。目標とする椎間板異常部に隣接した位置に能動電極910を操向可能にするために、シャフト955/952′は少なくともシャフト末端952aの上で可撓性を有することが好ましい。この可撓性シャフトは、末端952aの選択的偏りを生み出すための、スライドする外側シールド、スライドする外側導入針、牽引ワイヤ、形状記憶アクチュエータ、及びその他の公知の機構(図示しない)と組み合わされて、椎間板の内部における能動電極910の位置決めを行ない易くすることがある。こうして、図44の実施形態が、繊維輪の裂け目の目標とする治療、あるいはCoblation(登録商標)が必要とされるその他の椎間板の異常への目標とする治療に使用されることがわかる。
【0201】
一実施形態においては、胸腔や腹等を通じて外科医がシャフトを導入して目標の椎間板や椎骨に到達させることを可能にするように、シャフト952は適当な直径と長さとを有する。即ち、シャフト952は約5.0〜30.0cmの範囲の長さと、約0.2〜約20mmの範囲の直径を有する。代わりに、シャフト952が経皮的に後部側面から接近するように供給されてもよい。接近の如何に関わらず、シャフト952は剛性又は可撓性内視鏡を介して導入される。それに加えて、図41と図44を参照して述べた方法は補助導入装置938と補助装置940とを用いなくても実行可能なことに留意すべきである。
【0202】
本発明を主として椎間板の電気外科的治療に関して説明してきたが、本発明の方法と装置は他の組織、器官、及び身体構造の治療にも適用可能であることが理解されるべきである。例えば、本発明の「S湾曲」形状の原理は、医療器具が導入装置内から前進あるいは後退する際に、医療器具の末端が導入装置に接触或いは衝突しないことが望まれる導入装置の内部を医療器具が通過する任意の医療システム或いは装置にも適用され得る。導入装置は医療器具が通過する任意の装置であってよい。例えば、このような医療システム或いは装置は、カテーテル、カニューレ、内視鏡、その他を含む。即ち、本発明の例示的実施形態が、例示として理解を助けるために詳細に説明されたが、本技術分野に知識を有するものであれば種々の変更、改作、修正は自明である。したがって、本発明の範囲は特許請求の範囲によってのみ限定されるものである。
【図面の簡単な説明】
【図1】 図1は、組織の切断、切除、切開、及び収縮のため、並びに血管の止血のための電気外科用プローブと電源装置とを組み込んだ本発明の電気外科装置の斜視図である。
【図2】 図2は、本発明の電源装置の一実施形態を模式的に示した図である。
【図3】 図3は、複数の能動電極とこれに関連する電流制限エレメントとを組み込んだ電気外科装置を示した図である。
【図4】 図4は、本発明による電気外科用プローブの側面図である。
【図5】 図5は、図2のプローブの末端部分の図である。
【図6】 図6は、電気外科用プローブの基端部分の分解図である。
【図7A】 図7Aは、内部流体中空部を組み入れた別の電気外科用プローブの斜視図である。
【図7B】 図7Bは、内部流体中空部を組み入れた別の電気外科用プローブの端部の図である。
【図8A】 図8Aは、本発明による電気外科用プローブの実施形態の末端部分の断面図である。
【図8B】 図8Bは、本発明による電気外科用プローブの、図8Aで示したものとは別の実施形態の末端部分の断面図である。
【図8C】 図8Cは、本発明による電気外科用プローブの、図8A及び図8Bで示したものとは別の実施形態の末端部分の断面図である。
【図9】 図9は、吸引電極を組み込んだ図4のプローブの別の実施形態の端部の図である。
【図10】 図10は、吸引電極を組み込んだ図4のプローブの別の実施形態の端部の図である。
【図11】 図11は、吸引電極を組み込んだ図4のプローブの別の実施形態の端部の図である。
【図12】 図12は、吸引電極を組み込んだ図4のプローブの別の実施形態の端部の図である。
【図13】 図13は、本発明の一実施形態による電気外科用プローブのシャフト末端部分の側面図である。
【図14】 図14A〜図14Cは、スクリーン電極を組み込んだ別の実施形態の図である。
【図15A】 図15Aは、脊椎の欠陥を治療するように特に構成された電気外科用プローブの実施形態を示した図である。
【図15B】 図15Bは、脊椎の欠陥を治療するように特に構成された電気外科用プローブの実施形態を示した図である。
【図15C】 図15Cは、脊椎の欠陥を治療するように特に構成された電気外科用プローブの実施形態を示した図である。
【図15D】 図15Dは、脊椎の欠陥を治療するように特に構成された電気外科用プローブの実施形態を示した図である。
【図16】 図16は、単極及び/又は双極動作のための分散型復帰パッドを組み込んだ電気外科装置を示した図である。
【図17】 図17は、本発明による椎間板の電気外科的治療のためのカテーテル装置を示した図である。
【図18】 図18は、本発明の原理による、顕微鏡的椎間板切除の実行方法を示した図である。
【図19】 図19は、本発明の原理による、顕微鏡的椎間板切除の実行方法を示した図である。
【図20】 図20は、本発明の原理による、顕微鏡的椎間板切除の実行方法を示した図である。
【図21】 図21は、本発明の原理による、顕微鏡的椎間板切除の実行方法を示した図である。
【図22】 図22は、本発明の原理による、顕微鏡的椎間板切除の実行方法を示した図である。
【図23】 図23は、本発明のカテーテル又はプローブの一つによる椎間板の治療のもう一つの方法を示した図である。
【図24】 図24は、本発明のカテーテル又はプローブの一つによる椎間板の治療のもう一つの方法を示した図である。
【図25】 図25は、本発明のカテーテル又はプローブの一つによる椎間板の治療のもう一つの方法を示した図である。
【図26】 図26Aは、本発明による電気外科用プローブの側面図である。
図26Bは、図26Aの電気外科用プローブの末端部分の側面図である。
【図27】 図27Aは、湾曲したシャフトを有する電気外科用プローブの側面図である。
図27Bは、図27Aの湾曲したシャフト末端部分の側面図であり、導入装置の内部にシャフト末端部分が入っている。
図27Cは、導入装置を省略した図27Bの湾曲シャフト末端部分の側面図である。
【図28】 図28Aは、図29Aの電気外科用プローブの末端部分の側面図であり、頂点スパイクと赤道尖頭を有する能動電極を示している。
図28Bは、図28Aの電気外科用プローブの末端部分の断面図である。
【図29】 図29は、電気外科用プローブのシャフト末端部分の側面図であり、能動電極のヘッドに対する第1湾曲部と第2湾曲部の位置を示している。
【図30】 図30Aは、導入針末端から延びる電気外科用プローブのシャフト末端部分を示した図である。
図30Bは、能動電極が導入針の内部に後退した場合の導入針の内壁に対する能動電極の位置を示した図である。
【図31】 図31Aと図31Bは、それぞれ、導入針に対する電気外科用プローブの湾曲したシャフトの側面図と端面図を示した図である。
【図32】 図32Aは、電気外科用プローブのシャフト基端部分を示した図であり、このシャフトは複数の深さのマークを具えている。
図32Bは、電気外科用プローブのシャフト基端部分を示した図であり、このシャフトは機械的なストッパを具えている。
【図33】 図33は、本発明の電気外科用プローブの能動電極を製造する各段階を示した図である。
【図34】 図34は、本発明のプローブ用シャフトを製造する方法に含まれる一連の手順を模式的に示した図である。
【図35】 図35は、本発明の電気外科用プローブを製造する方法に含まれる一連の手順を模式的に示した図である。
【図36】 図36Aは、脊髄に対する正常な椎間板を模式的に示した図である。
図36Bは、髄核の突起とこれに伴うリング状繊維のひずみを表した椎間板を模式的に示した図である。
図36Cは、リング状繊維の内部の複数の割れ目とこれに伴うリング状繊維のひずみを表した椎間板を模式的に示した図である。
図36Dは、髄核の分裂とこれに伴うリング状繊維のひずみを表した椎間板を模式的に示した図である。
【図37】 図37は、椎間板の治療のために髄核の内部に電気外科用プローブの湾曲したシャフトを移動させる状態を模式的に示した図である。
【図38】 図38は、椎間板の内部の電気外科用プローブのシャフトを示した図であり、このシャフト末端部は椎間板の内部の特定箇所を指向している。
【図39】 図39は、本発明による椎間板組織を切除する方法に含まれる一連の手順を模式的に示した図である。
【図40】 図40は、本発明の別の実施形態による、目標とする椎間板組織の切除のために椎間板の内部の目標箇所に電気外科用プローブを案内する方法に含まれる一連の手順を模式的に示した図である。
【図41】 図41は、本発明の更に別の実施形態による電気外科用プローブと別個に導入された補助装置とを使用した椎間板の治療を示した図である。
【図42】 図42は、追跡装置を有する電気外科用プローブの側面図である。
【図43】 図43Aは、操作可能な電気外科用プローブを示した図であり、このプローブのシャフトはほぼ直線状の形状をなしている。
図43Bは、操作可能な図44Aの電気外科用プローブを示した図であり、このプローブのシャフト末端部は曲がった形状を採用している。
【図44】 図44は、椎間板の髄核の内部に挿入された操作可能な電気外科用プローブと補助装置とを示した図である。
Claims (9)
- シャフト末端部分及びシャフト基端部分を含んだシャフトを具備する医療装置であって、
前記シャフト末端部分は、該末端部分に配設された少なくとも一つの能動電極を含むと共に、前記少なくとも一つの能動電極の基端側に少なくとも一つの湾曲部を備える形状を有しており、
前記少なくとも一つの湾曲部は、第1湾曲部と、該第1湾曲部の基端側の第2湾曲部とを含んでおり、前記シャフト末端部分は、外力が作用したとき前記形状が変形し、次に前記外力が除かれたとき前記形状が復元するような弾性を有しており、
該医療装置は、針中空部を有する導入針をさらに含み、
前記針中空部はその中をシャフト末端部分が通過するようにされ、前記シャフト末端部分が末端側直線状部分を含み、前記能動電極がシャフトの先端で終端するように配置されている電極ヘッドを含み、前記第1湾曲部が第1角度によって特徴付けられ、前記第2湾曲部が第2角度によって特徴付けられ、針中空部内の電極ヘッドの横方向の位置が前記第1角度と前記末端側直線状部分の長さとによって決められ、
前記少なくとも一つの能動電極が、フィラメントと電極ヘッドとを含み、該医療装置が、前記フィラメントを包み込む第1絶縁スリーブと、前記第1絶縁スリーブの末端で前記電極ヘッドに隣接して配設された絶縁カラーとを更に具備し、
該医療装置が、前記第1絶縁スリーブ上に円筒状復帰電極を更に具備し、前記復帰電極が前記絶縁カラーの基端側に配置されており、
該医療装置が、前記復帰電極の基端側部分を包み込む第2絶縁スリーブを更に具備し、
該医療装置が、前記第2絶縁スリーブの少なくとも基端側部分を包み込むシャフトシールドを更に具備して、コネクタケーブルを介して電源装置に接続されるように構成され、前記コネクタケーブルが導電性ケーブルシールドを含み、前記シャフトシールドが前記導電性ケーブルシールドに接続されている、医療装置。 - 前記導入針が針末端を含み、そして前記シャフト末端部分が針末端から前進しそして針末端に後退する場合に、前記シャフト末端部分が前記導入針との接触を避ける、請求項1に記載の医療装置。
- 前記医療装置が、電気外科的処置の際に組織を切除するように構成され、前記少なくとも一つの湾曲部がシャフトの特定の曲率を規定し、該特定の曲率が前記医療装置の製造の際に設けられ、前記特定の曲率が組織の切除の際に少なくとも基本的には維持されている、請求項1に記載の医療装置。
- 前記少なくとも一つの能動電極がスパイクを有する電極ヘッドを含んでいる、請求項1に記載の医療装置。
- 前記電極ヘッドが、頂点スパイクと、該電極ヘッドのほぼ赤道に位置する尖頭とを含んでいる、請求項4に記載の医療装置。
- 前記絶縁カラーが、ガラス、セラミック、及びシリコーンからなる群から選ばれた材料よりなる、請求項1に記載の医療装置。
- シャフト基端部分に配置された少なくとも一つの深さマークを更に具備している、請求項1に記載の医療装置。
- 前記少なくとも一つの深さマークがX線不透過性材料よりなる、請求項7に記載の医療装置。
- 前記シャフト末端部分に配置された追跡装置を更に具備している、請求項1に記載の医療装置。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US22410700P | 2000-08-09 | 2000-08-09 | |
| US60/224,107 | 2000-08-09 | ||
| US09/676,194 | 2000-09-28 | ||
| US09/676,194 US6602248B1 (en) | 1995-06-07 | 2000-09-28 | Methods for repairing damaged intervertebral discs |
| US09/679,394 | 2000-10-03 | ||
| US09/679,394 US7070596B1 (en) | 2000-08-09 | 2000-10-03 | Electrosurgical apparatus having a curved distal section |
| PCT/US2001/015728 WO2002011635A1 (en) | 2000-08-09 | 2001-05-15 | Apparatus for treatment of spinal disorders |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004505663A JP2004505663A (ja) | 2004-02-26 |
| JP4986006B2 true JP4986006B2 (ja) | 2012-07-25 |
Family
ID=27397300
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002516975A Expired - Fee Related JP4986006B2 (ja) | 2000-08-09 | 2001-05-15 | 脊椎の不整を治療する装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7070596B1 (ja) |
| EP (1) | EP1309282A4 (ja) |
| JP (1) | JP4986006B2 (ja) |
| AU (1) | AU2001261637A1 (ja) |
| WO (1) | WO2002011635A1 (ja) |
Families Citing this family (151)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7429262B2 (en) * | 1992-01-07 | 2008-09-30 | Arthrocare Corporation | Apparatus and methods for electrosurgical ablation and resection of target tissue |
| US5697882A (en) | 1992-01-07 | 1997-12-16 | Arthrocare Corporation | System and method for electrosurgical cutting and ablation |
| US7297145B2 (en) | 1997-10-23 | 2007-11-20 | Arthrocare Corporation | Bipolar electrosurgical clamp for removing and modifying tissue |
| US6770071B2 (en) | 1995-06-07 | 2004-08-03 | Arthrocare Corporation | Bladed electrosurgical probe |
| US6149620A (en) | 1995-11-22 | 2000-11-21 | Arthrocare Corporation | System and methods for electrosurgical tissue treatment in the presence of electrically conductive fluid |
| US7270661B2 (en) | 1995-11-22 | 2007-09-18 | Arthocare Corporation | Electrosurgical apparatus and methods for treatment and removal of tissue |
| US7758537B1 (en) | 1995-11-22 | 2010-07-20 | Arthrocare Corporation | Systems and methods for electrosurgical removal of the stratum corneum |
| US7357798B2 (en) * | 1996-07-16 | 2008-04-15 | Arthrocare Corporation | Systems and methods for electrosurgical prevention of disc herniations |
| US7276063B2 (en) | 1998-08-11 | 2007-10-02 | Arthrocare Corporation | Instrument for electrosurgical tissue treatment |
| US7811282B2 (en) | 2000-03-06 | 2010-10-12 | Salient Surgical Technologies, Inc. | Fluid-assisted electrosurgical devices, electrosurgical unit with pump and methods of use thereof |
| US8048070B2 (en) | 2000-03-06 | 2011-11-01 | Salient Surgical Technologies, Inc. | Fluid-assisted medical devices, systems and methods |
| US6558385B1 (en) | 2000-09-22 | 2003-05-06 | Tissuelink Medical, Inc. | Fluid-assisted medical device |
| EP1263341B1 (en) | 2000-03-06 | 2008-06-11 | Salient Surgical Technologies, Inc. | Fluid delivery system and controller for electrosurgical devices |
| US6689131B2 (en) | 2001-03-08 | 2004-02-10 | Tissuelink Medical, Inc. | Electrosurgical device having a tissue reduction sensor |
| US9433457B2 (en) | 2000-12-09 | 2016-09-06 | Tsunami Medtech, Llc | Medical instruments and techniques for thermally-mediated therapies |
| WO2003068055A2 (en) | 2002-02-11 | 2003-08-21 | Arthrocare Corporation | Electrosurgical apparatus and methods for laparoscopy |
| US8043286B2 (en) | 2002-05-03 | 2011-10-25 | The Board Of Trustees Of The Leland Stanford Junior University | Method and apparatus for plasma-mediated thermo-electrical ablation |
| EP1572020A4 (en) | 2002-10-29 | 2006-05-03 | Tissuelink Medical Inc | LIQUID SUPPORTED ELECTRO SURGICAL SHEARS AND METHOD |
| US7794456B2 (en) | 2003-05-13 | 2010-09-14 | Arthrocare Corporation | Systems and methods for electrosurgical intervertebral disc replacement |
| US8012153B2 (en) | 2003-07-16 | 2011-09-06 | Arthrocare Corporation | Rotary electrosurgical apparatus and methods thereof |
| US7708733B2 (en) | 2003-10-20 | 2010-05-04 | Arthrocare Corporation | Electrosurgical method and apparatus for removing tissue within a bone body |
| US7727232B1 (en) | 2004-02-04 | 2010-06-01 | Salient Surgical Technologies, Inc. | Fluid-assisted medical devices and methods |
| AU2005234799B2 (en) * | 2004-04-23 | 2012-06-14 | Leonard Edward Forrest | Device for treatment or evacuation of intervertebral disc |
| US7704249B2 (en) | 2004-05-07 | 2010-04-27 | Arthrocare Corporation | Apparatus and methods for electrosurgical ablation and resection of target tissue |
| US7892230B2 (en) | 2004-06-24 | 2011-02-22 | Arthrocare Corporation | Electrosurgical device having planar vertical electrode and related methods |
| CA2574977C (en) | 2004-07-29 | 2010-01-26 | X-Sten, Corp. | Spinal ligament modification devices |
| US20100331883A1 (en) | 2004-10-15 | 2010-12-30 | Schmitz Gregory P | Access and tissue modification systems and methods |
| US8430881B2 (en) | 2004-10-15 | 2013-04-30 | Baxano, Inc. | Mechanical tissue modification devices and methods |
| US20110190772A1 (en) | 2004-10-15 | 2011-08-04 | Vahid Saadat | Powered tissue modification devices and methods |
| US7857813B2 (en) | 2006-08-29 | 2010-12-28 | Baxano, Inc. | Tissue access guidewire system and method |
| US7938830B2 (en) | 2004-10-15 | 2011-05-10 | Baxano, Inc. | Powered tissue modification devices and methods |
| US7738969B2 (en) | 2004-10-15 | 2010-06-15 | Baxano, Inc. | Devices and methods for selective surgical removal of tissue |
| US20080103504A1 (en) * | 2006-10-30 | 2008-05-01 | Schmitz Gregory P | Percutaneous spinal stenosis treatment |
| US8257356B2 (en) | 2004-10-15 | 2012-09-04 | Baxano, Inc. | Guidewire exchange systems to treat spinal stenosis |
| US8062300B2 (en) | 2006-05-04 | 2011-11-22 | Baxano, Inc. | Tissue removal with at least partially flexible devices |
| US7578819B2 (en) | 2005-05-16 | 2009-08-25 | Baxano, Inc. | Spinal access and neural localization |
| EP1799129B1 (en) | 2004-10-15 | 2020-11-25 | Baxano, Inc. | Devices for tissue removal |
| US9101386B2 (en) | 2004-10-15 | 2015-08-11 | Amendia, Inc. | Devices and methods for treating tissue |
| US8613745B2 (en) | 2004-10-15 | 2013-12-24 | Baxano Surgical, Inc. | Methods, systems and devices for carpal tunnel release |
| US7887538B2 (en) | 2005-10-15 | 2011-02-15 | Baxano, Inc. | Methods and apparatus for tissue modification |
| US8048080B2 (en) | 2004-10-15 | 2011-11-01 | Baxano, Inc. | Flexible tissue rasp |
| US8221397B2 (en) | 2004-10-15 | 2012-07-17 | Baxano, Inc. | Devices and methods for tissue modification |
| US7553307B2 (en) | 2004-10-15 | 2009-06-30 | Baxano, Inc. | Devices and methods for tissue modification |
| US9247952B2 (en) | 2004-10-15 | 2016-02-02 | Amendia, Inc. | Devices and methods for tissue access |
| FR2884149B1 (fr) * | 2005-04-12 | 2007-06-08 | Henri Mehier | Tube implantable destine a l'injection notamment de fluide caloporteur dans tout ou partie d'un tissu humain ou animal |
| EP3228265A3 (en) | 2005-07-29 | 2018-05-23 | Vertos Medical, Inc. | Percutaneous tissue excision devices |
| US8062298B2 (en) | 2005-10-15 | 2011-11-22 | Baxano, Inc. | Flexible tissue removal devices and methods |
| US8092456B2 (en) | 2005-10-15 | 2012-01-10 | Baxano, Inc. | Multiple pathways for spinal nerve root decompression from a single access point |
| US8366712B2 (en) | 2005-10-15 | 2013-02-05 | Baxano, Inc. | Multiple pathways for spinal nerve root decompression from a single access point |
| US20070123890A1 (en) * | 2005-11-04 | 2007-05-31 | X-Sten, Corp. | Tissue retrieval devices and methods |
| US7691101B2 (en) | 2006-01-06 | 2010-04-06 | Arthrocare Corporation | Electrosurgical method and system for treating foot ulcer |
| US8876746B2 (en) | 2006-01-06 | 2014-11-04 | Arthrocare Corporation | Electrosurgical system and method for treating chronic wound tissue |
| EP3585135A1 (en) * | 2006-02-21 | 2019-12-25 | Goji Limited | Electromagnetic heating |
| US7879034B2 (en) | 2006-03-02 | 2011-02-01 | Arthrocare Corporation | Internally located return electrode electrosurgical apparatus, system and method |
| US7942830B2 (en) | 2006-05-09 | 2011-05-17 | Vertos Medical, Inc. | Ipsilateral approach to minimally invasive ligament decompression procedure |
| WO2007143445A2 (en) | 2006-05-30 | 2007-12-13 | Arthrocare Corporation | Hard tissue ablation system |
| USD620593S1 (en) | 2006-07-31 | 2010-07-27 | Vertos Medical, Inc. | Tissue excision device |
| EP1897506B1 (en) * | 2006-09-08 | 2010-03-03 | Ethicon Endo-Surgery, Inc. | A surgical instrument for performing controlled myotomies |
| WO2008067304A2 (en) * | 2006-11-27 | 2008-06-05 | Michael Lau | Methods and apparatuses for contouring tissue by selective application of energy |
| US20080140113A1 (en) * | 2006-12-07 | 2008-06-12 | Cierra, Inc. | Method for sealing a pfo using an energy delivery device |
| US8192424B2 (en) | 2007-01-05 | 2012-06-05 | Arthrocare Corporation | Electrosurgical system with suction control apparatus, system and method |
| US7862560B2 (en) | 2007-03-23 | 2011-01-04 | Arthrocare Corporation | Ablation apparatus having reduced nerve stimulation and related methods |
| EP2170198B1 (en) * | 2007-07-06 | 2015-04-15 | Tsunami Medtech, LLC | Medical system |
| US8221403B2 (en) | 2007-08-23 | 2012-07-17 | Aegea Medical, Inc. | Uterine therapy device and method |
| WO2009032363A1 (en) | 2007-09-06 | 2009-03-12 | Baxano, Inc. | Method, system and apparatus for neural localization |
| US8192436B2 (en) | 2007-12-07 | 2012-06-05 | Baxano, Inc. | Tissue modification devices |
| US9358063B2 (en) | 2008-02-14 | 2016-06-07 | Arthrocare Corporation | Ablation performance indicator for electrosurgical devices |
| US9924992B2 (en) | 2008-02-20 | 2018-03-27 | Tsunami Medtech, Llc | Medical system and method of use |
| KR100974420B1 (ko) * | 2008-03-24 | 2010-08-05 | 고려대학교 산학협력단 | 고주파 전극 장치 |
| US9272359B2 (en) | 2008-05-30 | 2016-03-01 | Colorado State University Research Foundation | Liquid-gas interface plasma device |
| WO2009146432A1 (en) | 2008-05-30 | 2009-12-03 | Colorado State University Research Foundation | Plasma-based chemical source device and method of use thereof |
| WO2009146439A1 (en) | 2008-05-30 | 2009-12-03 | Colorado State University Research Foundation | System, method and apparatus for generating plasma |
| US8994270B2 (en) | 2008-05-30 | 2015-03-31 | Colorado State University Research Foundation | System and methods for plasma application |
| US8721632B2 (en) | 2008-09-09 | 2014-05-13 | Tsunami Medtech, Llc | Methods for delivering energy into a target tissue of a body |
| US9314253B2 (en) | 2008-07-01 | 2016-04-19 | Amendia, Inc. | Tissue modification devices and methods |
| US8409206B2 (en) | 2008-07-01 | 2013-04-02 | Baxano, Inc. | Tissue modification devices and methods |
| US8398641B2 (en) | 2008-07-01 | 2013-03-19 | Baxano, Inc. | Tissue modification devices and methods |
| AU2009271047B2 (en) | 2008-07-14 | 2014-04-17 | Baxano Surgical, Inc. | Tissue modification devices |
| US8747400B2 (en) | 2008-08-13 | 2014-06-10 | Arthrocare Corporation | Systems and methods for screen electrode securement |
| ES2874923T3 (es) | 2008-08-15 | 2021-11-05 | Becton Dickinson Co | Conjunto de protector exterior para un inyector médico |
| EP2370008A4 (en) * | 2008-10-14 | 2013-07-31 | Spinal Architects Inc | RESTRUCTURING THE VERTEBRAL COLUMN |
| USD621939S1 (en) | 2008-10-23 | 2010-08-17 | Vertos Medical, Inc. | Tissue modification device |
| USD610259S1 (en) | 2008-10-23 | 2010-02-16 | Vertos Medical, Inc. | Tissue modification device |
| USD619253S1 (en) | 2008-10-23 | 2010-07-06 | Vertos Medical, Inc. | Tissue modification device |
| USD611146S1 (en) | 2008-10-23 | 2010-03-02 | Vertos Medical, Inc. | Tissue modification device |
| USD635671S1 (en) | 2008-10-23 | 2011-04-05 | Vertos Medical, Inc. | Tissue modification device |
| USD619252S1 (en) | 2008-10-23 | 2010-07-06 | Vertos Medical, Inc. | Tissue modification device |
| US8355799B2 (en) | 2008-12-12 | 2013-01-15 | Arthrocare Corporation | Systems and methods for limiting joint temperature |
| US11284931B2 (en) | 2009-02-03 | 2022-03-29 | Tsunami Medtech, Llc | Medical systems and methods for ablating and absorbing tissue |
| US8574187B2 (en) | 2009-03-09 | 2013-11-05 | Arthrocare Corporation | System and method of an electrosurgical controller with output RF energy control |
| WO2010105261A2 (en) | 2009-03-13 | 2010-09-16 | Baxano, Inc. | Flexible neural localization devices and methods |
| CN102458289B (zh) * | 2009-06-09 | 2015-06-17 | 友和安股份公司 | 可选择地去除身体组织的方向可控电极体,以及导管 |
| US8257350B2 (en) | 2009-06-17 | 2012-09-04 | Arthrocare Corporation | Method and system of an electrosurgical controller with wave-shaping |
| US8394102B2 (en) | 2009-06-25 | 2013-03-12 | Baxano, Inc. | Surgical tools for treatment of spinal stenosis |
| US8323279B2 (en) | 2009-09-25 | 2012-12-04 | Arthocare Corporation | System, method and apparatus for electrosurgical instrument with movable fluid delivery sheath |
| US8317786B2 (en) | 2009-09-25 | 2012-11-27 | AthroCare Corporation | System, method and apparatus for electrosurgical instrument with movable suction sheath |
| US8222822B2 (en) | 2009-10-27 | 2012-07-17 | Tyco Healthcare Group Lp | Inductively-coupled plasma device |
| US8372067B2 (en) | 2009-12-09 | 2013-02-12 | Arthrocare Corporation | Electrosurgery irrigation primer systems and methods |
| GB2477352B (en) * | 2010-02-01 | 2015-11-04 | Gyrus Medical Ltd | Electrosurgical system |
| AU2010349785B2 (en) | 2010-03-31 | 2014-02-27 | Colorado State University Research Foundation | Liquid-gas interface plasma device |
| US8747399B2 (en) | 2010-04-06 | 2014-06-10 | Arthrocare Corporation | Method and system of reduction of low frequency muscle stimulation during electrosurgical procedures |
| US8696659B2 (en) | 2010-04-30 | 2014-04-15 | Arthrocare Corporation | Electrosurgical system and method having enhanced temperature measurement |
| US8979838B2 (en) | 2010-05-24 | 2015-03-17 | Arthrocare Corporation | Symmetric switching electrode method and related system |
| US9943353B2 (en) | 2013-03-15 | 2018-04-17 | Tsunami Medtech, Llc | Medical system and method of use |
| US8568405B2 (en) | 2010-10-15 | 2013-10-29 | Arthrocare Corporation | Electrosurgical wand and related method and system |
| USD658760S1 (en) | 2010-10-15 | 2012-05-01 | Arthrocare Corporation | Wound care electrosurgical wand |
| US8685018B2 (en) | 2010-10-15 | 2014-04-01 | Arthrocare Corporation | Electrosurgical wand and related method and system |
| US10448992B2 (en) | 2010-10-22 | 2019-10-22 | Arthrocare Corporation | Electrosurgical system with device specific operational parameters |
| US9060765B2 (en) | 2010-11-08 | 2015-06-23 | Bovie Medical Corporation | Electrosurgical apparatus with retractable blade |
| EP2637590B1 (en) | 2010-11-09 | 2022-04-13 | Aegea Medical, Inc. | Positioning apparatus for delivering vapor to the uterus |
| US8747401B2 (en) | 2011-01-20 | 2014-06-10 | Arthrocare Corporation | Systems and methods for turbinate reduction |
| US9131597B2 (en) | 2011-02-02 | 2015-09-08 | Arthrocare Corporation | Electrosurgical system and method for treating hard body tissue |
| US9271784B2 (en) * | 2011-02-09 | 2016-03-01 | Arthrocare Corporation | Fine dissection electrosurgical device |
| US9168082B2 (en) | 2011-02-09 | 2015-10-27 | Arthrocare Corporation | Fine dissection electrosurgical device |
| US9011428B2 (en) | 2011-03-02 | 2015-04-21 | Arthrocare Corporation | Electrosurgical device with internal digestor electrode |
| WO2012170364A1 (en) | 2011-06-10 | 2012-12-13 | Medtronic, Inc. | Wire electrode devices for tonsillectomy and adenoidectomy |
| US9788882B2 (en) | 2011-09-08 | 2017-10-17 | Arthrocare Corporation | Plasma bipolar forceps |
| US9662060B2 (en) | 2011-10-07 | 2017-05-30 | Aegea Medical Inc. | Integrity testing method and apparatus for delivering vapor to the uterus |
| US10117703B2 (en) * | 2011-10-17 | 2018-11-06 | Beaver-Visitec International (Us), Inc. | Method of, and device for, marking a patients eye for reference during a toric lens implantation procedure |
| US11234760B2 (en) * | 2012-10-05 | 2022-02-01 | Medtronic Advanced Energy Llc | Electrosurgical device for cutting and removing tissue |
| US9254166B2 (en) | 2013-01-17 | 2016-02-09 | Arthrocare Corporation | Systems and methods for turbinate reduction |
| US9532826B2 (en) | 2013-03-06 | 2017-01-03 | Covidien Lp | System and method for sinus surgery |
| US9713489B2 (en) | 2013-03-07 | 2017-07-25 | Arthrocare Corporation | Electrosurgical methods and systems |
| US9693818B2 (en) | 2013-03-07 | 2017-07-04 | Arthrocare Corporation | Methods and systems related to electrosurgical wands |
| US9801678B2 (en) | 2013-03-13 | 2017-10-31 | Arthrocare Corporation | Method and system of controlling conductive fluid flow during an electrosurgical procedure |
| US9555145B2 (en) | 2013-03-13 | 2017-01-31 | Covidien Lp | System and method for biofilm remediation |
| AU2014364517B2 (en) | 2013-12-20 | 2019-06-20 | Arthrocare Corporation | Knotless all suture tissue repair |
| US10420607B2 (en) | 2014-02-14 | 2019-09-24 | Arthrocare Corporation | Methods and systems related to an electrosurgical controller |
| US10237962B2 (en) | 2014-02-26 | 2019-03-19 | Covidien Lp | Variable frequency excitation plasma device for thermal and non-thermal tissue effects |
| US20160367314A1 (en) * | 2014-02-28 | 2016-12-22 | Tenjin LLC | Bendable and rebendable endoscopic electrosurgical device |
| US9526556B2 (en) | 2014-02-28 | 2016-12-27 | Arthrocare Corporation | Systems and methods systems related to electrosurgical wands with screen electrodes |
| ES2942296T3 (es) | 2014-05-22 | 2023-05-31 | Aegea Medical Inc | Método de prueba de integridad y aparato para administrar vapor al útero |
| CN106794030B (zh) | 2014-05-22 | 2019-09-03 | 埃杰亚医疗公司 | 用于执行子宫内膜消融术的系统和方法 |
| EP3250141B1 (en) | 2015-01-28 | 2023-10-11 | Apyx Medical Corporation | Cold plasma electrosurgical apparatus with bent tip applicator |
| CA2976386A1 (en) * | 2015-02-18 | 2016-08-25 | Retrovascular, Inc. | Radiofrequency guidewire with controlled plasma generation and methods of use thereof |
| DE102015015314A1 (de) | 2015-11-26 | 2017-06-14 | Olympus Winter & Ibe Gmbh | Chirurgische Vaporistionselektrode |
| US11096823B2 (en) | 2016-01-14 | 2021-08-24 | Beaver-Visitec International (Us), Inc. | Ophthalmic marking device and method of using same |
| CN109069064B (zh) | 2016-02-19 | 2022-05-13 | 埃杰亚医疗公司 | 用于确定体腔的完整性的方法和设备 |
| US10524849B2 (en) | 2016-08-02 | 2020-01-07 | Covidien Lp | System and method for catheter-based plasma coagulation |
| PL3509506T3 (pl) | 2016-09-07 | 2021-10-25 | Vertos Medical, Inc. | Narzędzia do przezskórnej resekcji zachyłka bocznego |
| US11026744B2 (en) * | 2016-11-28 | 2021-06-08 | Dfine, Inc. | Tumor ablation devices and related methods |
| US11602390B2 (en) | 2017-01-30 | 2023-03-14 | Apyx Medical Corporation | Electrosurgical apparatus with flexible shaft |
| EP3406218A1 (de) * | 2017-05-24 | 2018-11-28 | Erbe Elektromedizin GmbH | Koagulations- und dissektions-instrument mit stiftelektroden |
| WO2018222562A1 (en) | 2017-05-30 | 2018-12-06 | Bovie Medical Corporation | Electrosurgical apparatus with robotic tip |
| US11744631B2 (en) | 2017-09-22 | 2023-09-05 | Covidien Lp | Systems and methods for controlled electrosurgical coagulation |
| KR102035857B1 (ko) * | 2018-01-16 | 2019-10-24 | 주식회사 텍코드 | 경피적 뇌하수체종양적출용 전극니들 도구 키트 |
| US11553979B2 (en) * | 2018-02-28 | 2023-01-17 | Gyrus Acmi, Inc. | Surgical device having an integral fluid distribution system |
| KR102076981B1 (ko) * | 2018-09-28 | 2020-02-13 | 주식회사 엠케어코리아 | 경피적 경막외 신경성형술용 천골관 진입 드릴 |
| US20220401085A1 (en) * | 2019-11-25 | 2022-12-22 | Eric R. Cosman, Jr. | Electrosurgical system |
| US20210353354A1 (en) * | 2020-05-14 | 2021-11-18 | Singlepass Transseptal, Inc. | Method for single pass large bore transseptal crossing |
| WO2024073765A2 (en) * | 2022-09-30 | 2024-04-04 | Squirrel Corporation | Apparatus and methods for tissue ablation |
Family Cites Families (126)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2056377A (en) | 1933-08-16 | 1936-10-06 | Wappler Frederick Charles | Electrodic instrument |
| US2050904A (en) | 1934-11-26 | 1936-08-11 | Trice Spencer Talley | Electric hemostat or cautery |
| US3815604A (en) | 1972-06-19 | 1974-06-11 | Malley C O | Apparatus for intraocular surgery |
| US3828780A (en) | 1973-03-26 | 1974-08-13 | Valleylab Inc | Combined electrocoagulator-suction instrument |
| DE2324658B2 (de) | 1973-05-16 | 1977-06-30 | Richard Wolf Gmbh, 7134 Knittlingen | Sonde zum koagulieren von koerpergewebe |
| US3901242A (en) | 1974-05-30 | 1975-08-26 | Storz Endoskop Gmbh | Electric surgical instrument |
| US4033351A (en) | 1974-06-14 | 1977-07-05 | Siemens Aktiengesellschaft | Bipolar cutting electrode for high-frequency surgery |
| US3939839A (en) | 1974-06-26 | 1976-02-24 | American Cystoscope Makers, Inc. | Resectoscope and electrode therefor |
| US3987795A (en) | 1974-08-28 | 1976-10-26 | Valleylab, Inc. | Electrosurgical devices having sesquipolar electrode structures incorporated therein |
| US4043342A (en) | 1974-08-28 | 1977-08-23 | Valleylab, Inc. | Electrosurgical devices having sesquipolar electrode structures incorporated therein |
| DE2521719C2 (de) | 1975-05-15 | 1985-06-20 | Delma, Elektro- Und Medizinische Apparatebaugesellschaft Mbh, 7200 Tuttlingen | Elektrochirurgische Vorrichtung |
| US4184492A (en) | 1975-08-07 | 1980-01-22 | Karl Storz Endoscopy-America, Inc. | Safety circuitry for high frequency cutting and coagulating devices |
| US4040426A (en) | 1976-01-16 | 1977-08-09 | Valleylab, Inc. | Electrosurgical method and apparatus for initiating an electrical discharge in an inert gas flow |
| US4074718A (en) | 1976-03-17 | 1978-02-21 | Valleylab, Inc. | Electrosurgical instrument |
| US4092986A (en) | 1976-06-14 | 1978-06-06 | Ipco Hospital Supply Corporation (Whaledent International Division) | Constant output electrosurgical unit |
| US4181131A (en) | 1977-02-28 | 1980-01-01 | Olympus Optical Co., Ltd. | High frequency electrosurgical instrument for cutting human body cavity structures |
| US4202337A (en) | 1977-06-14 | 1980-05-13 | Concept, Inc. | Bipolar electrosurgical knife |
| US4228800A (en) | 1978-04-04 | 1980-10-21 | Concept, Inc. | Bipolar electrosurgical knife |
| US4326529A (en) | 1978-05-26 | 1982-04-27 | The United States Of America As Represented By The United States Department Of Energy | Corneal-shaping electrode |
| US4240441A (en) | 1978-10-10 | 1980-12-23 | The United States Of America As Represented By The Secretary Of The Navy | Carotid thermodilution catheter |
| US4232676A (en) | 1978-11-16 | 1980-11-11 | Corning Glass Works | Surgical cutting instrument |
| US4248231A (en) | 1978-11-16 | 1981-02-03 | Corning Glass Works | Surgical cutting instrument |
| JPS614260B2 (ja) | 1980-05-13 | 1986-02-07 | Amerikan Hosupitaru Sapurai Corp | |
| US4805616A (en) | 1980-12-08 | 1989-02-21 | Pao David S C | Bipolar probes for ophthalmic surgery and methods of performing anterior capsulotomy |
| US4674499A (en) | 1980-12-08 | 1987-06-23 | Pao David S C | Coaxial bipolar probe |
| US4476862A (en) | 1980-12-08 | 1984-10-16 | Pao David S C | Method of scleral marking |
| US4381007A (en) | 1981-04-30 | 1983-04-26 | The United States Of America As Represented By The United States Department Of Energy | Multipolar corneal-shaping electrode with flexible removable skirt |
| US4548207A (en) | 1982-11-17 | 1985-10-22 | Mentor O & O, Inc. | Disposable coagulator |
| US4590934A (en) | 1983-05-18 | 1986-05-27 | Jerry L. Malis | Bipolar cutter/coagulator |
| US4593691A (en) | 1983-07-13 | 1986-06-10 | Concept, Inc. | Electrosurgery electrode |
| JPS6036041A (ja) | 1983-08-09 | 1985-02-25 | 太田 富雄 | 手術に用いる双極電気凝固用ピンセット |
| US4682596A (en) | 1984-05-22 | 1987-07-28 | Cordis Corporation | Electrosurgical catheter and method for vascular applications |
| DE3423356C2 (de) | 1984-06-25 | 1986-06-26 | Berchtold Medizin-Elektronik GmbH & Co, 7200 Tuttlingen | Elektrochirurgisches Hochfrequenz-Schneidinstrument |
| US4727874A (en) | 1984-09-10 | 1988-03-01 | C. R. Bard, Inc. | Electrosurgical generator with high-frequency pulse width modulated feedback power control |
| US4660571A (en) | 1985-07-18 | 1987-04-28 | Cordis Corporation | Percutaneous lead having radially adjustable electrode |
| US4750488A (en) | 1986-05-19 | 1988-06-14 | Sonomed Technology, Inc. | Vibration apparatus preferably for endoscopic ultrasonic aspirator |
| US4709698A (en) | 1986-05-14 | 1987-12-01 | Thomas J. Fogarty | Heatable dilation catheter |
| US4765331A (en) | 1987-02-10 | 1988-08-23 | Circon Corporation | Electrosurgical device with treatment arc of less than 360 degrees |
| US4823791A (en) | 1987-05-08 | 1989-04-25 | Circon Acmi Division Of Circon Corporation | Electrosurgical probe apparatus |
| US4943290A (en) | 1987-06-23 | 1990-07-24 | Concept Inc. | Electrolyte purging electrode tip |
| US4936301A (en) | 1987-06-23 | 1990-06-26 | Concept, Inc. | Electrosurgical method using an electrically conductive fluid |
| US4785823A (en) | 1987-07-21 | 1988-11-22 | Robert F. Shaw | Methods and apparatus for performing in vivo blood thermodilution procedures |
| US4931047A (en) | 1987-09-30 | 1990-06-05 | Cavitron, Inc. | Method and apparatus for providing enhanced tissue fragmentation and/or hemostasis |
| US4832048A (en) | 1987-10-29 | 1989-05-23 | Cordis Corporation | Suction ablation catheter |
| ATE132047T1 (de) | 1988-01-20 | 1996-01-15 | G2 Design Ltd | Diathermiegerät |
| US4860752A (en) | 1988-02-18 | 1989-08-29 | Bsd Medical Corporation | Invasive microwave array with destructive and coherent phase |
| DE3815835A1 (de) | 1988-05-09 | 1989-11-23 | Flachenecker Gerhard | Hochfrequenzgenerator zum gewebeschneiden und koagulieren in der hochfrequenzchirurgie |
| AU3696989A (en) | 1988-05-18 | 1989-12-12 | Kasevich Associates, Inc. | Microwave balloon angioplasty |
| US5178620A (en) | 1988-06-10 | 1993-01-12 | Advanced Angioplasty Products, Inc. | Thermal dilatation catheter and method |
| US4998933A (en) | 1988-06-10 | 1991-03-12 | Advanced Angioplasty Products, Inc. | Thermal angioplasty catheter and method |
| US4967765A (en) | 1988-07-28 | 1990-11-06 | Bsd Medical Corporation | Urethral inserted applicator for prostate hyperthermia |
| US5249585A (en) | 1988-07-28 | 1993-10-05 | Bsd Medical Corporation | Urethral inserted applicator for prostate hyperthermia |
| US4920978A (en) | 1988-08-31 | 1990-05-01 | Triangle Research And Development Corporation | Method and apparatus for the endoscopic treatment of deep tumors using RF hyperthermia |
| US5112330A (en) | 1988-09-16 | 1992-05-12 | Olympus Optical Co., Ltd. | Resectoscope apparatus |
| US4955377A (en) | 1988-10-28 | 1990-09-11 | Lennox Charles D | Device and method for heating tissue in a patient's body |
| US4966597A (en) | 1988-11-04 | 1990-10-30 | Cosman Eric R | Thermometric cardiac tissue ablation electrode with ultra-sensitive temperature detection |
| US4936281A (en) | 1989-04-13 | 1990-06-26 | Everest Medical Corporation | Ultrasonically enhanced RF ablation catheter |
| US5078717A (en) | 1989-04-13 | 1992-01-07 | Everest Medical Corporation | Ablation catheter with selectively deployable electrodes |
| US5098431A (en) | 1989-04-13 | 1992-03-24 | Everest Medical Corporation | RF ablation catheter |
| US5125928A (en) | 1989-04-13 | 1992-06-30 | Everest Medical Corporation | Ablation catheter with selectively deployable electrodes |
| US4979948A (en) | 1989-04-13 | 1990-12-25 | Purdue Research Foundation | Method and apparatus for thermally destroying a layer of an organ |
| US4976711A (en) | 1989-04-13 | 1990-12-11 | Everest Medical Corporation | Ablation catheter with selectively deployable electrodes |
| US5084044A (en) | 1989-07-14 | 1992-01-28 | Ciron Corporation | Apparatus for endometrial ablation and method of using same |
| US5009656A (en) | 1989-08-17 | 1991-04-23 | Mentor O&O Inc. | Bipolar electrosurgical instrument |
| US5057105A (en) | 1989-08-28 | 1991-10-15 | The University Of Kansas Med Center | Hot tip catheter assembly |
| US5047026A (en) | 1989-09-29 | 1991-09-10 | Everest Medical Corporation | Electrosurgical implement for tunneling through tissue |
| US5007908A (en) | 1989-09-29 | 1991-04-16 | Everest Medical Corporation | Electrosurgical instrument having needle cutting electrode and spot-coag electrode |
| US5035696A (en) | 1990-02-02 | 1991-07-30 | Everest Medical Corporation | Electrosurgical instrument for conducting endoscopic retrograde sphincterotomy |
| US5088997A (en) | 1990-03-15 | 1992-02-18 | Valleylab, Inc. | Gas coagulation device |
| US5217457A (en) | 1990-03-15 | 1993-06-08 | Valleylab Inc. | Enhanced electrosurgical apparatus |
| US5306238A (en) | 1990-03-16 | 1994-04-26 | Beacon Laboratories, Inc. | Laparoscopic electrosurgical pencil |
| US5047027A (en) | 1990-04-20 | 1991-09-10 | Everest Medical Corporation | Tumor resector |
| US5171311A (en) | 1990-04-30 | 1992-12-15 | Everest Medical Corporation | Percutaneous laparoscopic cholecystectomy instrument |
| US5312400A (en) | 1992-10-09 | 1994-05-17 | Symbiosis Corporation | Cautery probes for endoscopic electrosurgical suction-irrigation instrument |
| US5080660A (en) | 1990-05-11 | 1992-01-14 | Applied Urology, Inc. | Electrosurgical electrode |
| JPH0734805B2 (ja) | 1990-05-16 | 1995-04-19 | アロカ株式会社 | 血液凝固装置 |
| US5195958A (en) | 1990-05-25 | 1993-03-23 | Phillips Edward H | Tool for laparoscopic surgery |
| DE69128260T2 (de) * | 1990-07-02 | 1998-10-01 | Boston Scient Corp Northwest T | Katheter zur dissipativen Rekanalisierung von Gewebe |
| US5092339A (en) | 1990-07-23 | 1992-03-03 | Geddes Leslie A | Method and apparatus for electrically compensated measurement of cardiac output |
| US5083565A (en) | 1990-08-03 | 1992-01-28 | Everest Medical Corporation | Electrosurgical instrument for ablating endocardial tissue |
| US5085659A (en) | 1990-11-21 | 1992-02-04 | Everest Medical Corporation | Biopsy device with bipolar coagulation capability |
| US5122138A (en) | 1990-11-28 | 1992-06-16 | Manwaring Kim H | Tissue vaporizing accessory and method for an endoscope |
| DE9117190U1 (de) | 1991-01-16 | 1996-11-14 | Erbe Elektromedizin GmbH, 72072 Tübingen | Hochfrequenz-Chirurgiegerät |
| US5195959A (en) | 1991-05-31 | 1993-03-23 | Paul C. Smith | Electrosurgical device with suction and irrigation |
| US5190517A (en) | 1991-06-06 | 1993-03-02 | Valleylab Inc. | Electrosurgical and ultrasonic surgical system |
| DE4122219A1 (de) | 1991-07-04 | 1993-01-07 | Delma Elektro Med App | Elektrochirurgisches behandlungsinstrument |
| US5207675A (en) | 1991-07-15 | 1993-05-04 | Jerome Canady | Surgical coagulation device |
| US5217459A (en) | 1991-08-27 | 1993-06-08 | William Kamerling | Method and instrument for performing eye surgery |
| US5697909A (en) | 1992-01-07 | 1997-12-16 | Arthrocare Corporation | Methods and apparatus for surgical cutting |
| US5273524A (en) | 1991-10-09 | 1993-12-28 | Ethicon, Inc. | Electrosurgical device |
| US5697281A (en) | 1991-10-09 | 1997-12-16 | Arthrocare Corporation | System and method for electrosurgical cutting and ablation |
| US5192280A (en) | 1991-11-25 | 1993-03-09 | Everest Medical Corporation | Pivoting multiple loop bipolar cutting device |
| US5197963A (en) | 1991-12-02 | 1993-03-30 | Everest Medical Corporation | Electrosurgical instrument with extendable sheath for irrigation and aspiration |
| US5843019A (en) | 1992-01-07 | 1998-12-01 | Arthrocare Corporation | Shaped electrodes and methods for electrosurgical cutting and ablation |
| US6159194A (en) | 1992-01-07 | 2000-12-12 | Arthrocare Corporation | System and method for electrosurgical tissue contraction |
| WO1994026228A1 (en) | 1993-05-10 | 1994-11-24 | Thapliyal And Eggers Partners | Methods and apparatus for surgical cutting |
| US6190381B1 (en) | 1995-06-07 | 2001-02-20 | Arthrocare Corporation | Methods for tissue resection, ablation and aspiration |
| US6355032B1 (en) | 1995-06-07 | 2002-03-12 | Arthrocare Corporation | Systems and methods for selective electrosurgical treatment of body structures |
| US5697882A (en) | 1992-01-07 | 1997-12-16 | Arthrocare Corporation | System and method for electrosurgical cutting and ablation |
| US6142992A (en) | 1993-05-10 | 2000-11-07 | Arthrocare Corporation | Power supply for limiting power in electrosurgery |
| US5267994A (en) | 1992-02-10 | 1993-12-07 | Conmed Corporation | Electrosurgical probe |
| US5281216A (en) | 1992-03-31 | 1994-01-25 | Valleylab, Inc. | Electrosurgical bipolar treating apparatus |
| US5277201A (en) | 1992-05-01 | 1994-01-11 | Vesta Medical, Inc. | Endometrial ablation apparatus and method |
| US5318563A (en) | 1992-06-04 | 1994-06-07 | Valley Forge Scientific Corporation | Bipolar RF generator |
| US5281218A (en) | 1992-06-05 | 1994-01-25 | Cardiac Pathways Corporation | Catheter having needle electrode for radiofrequency ablation |
| US5290282A (en) | 1992-06-26 | 1994-03-01 | Christopher D. Casscells | Coagulating cannula |
| US5300069A (en) | 1992-08-12 | 1994-04-05 | Daniel Hunsberger | Electrosurgical apparatus for laparoscopic procedures and method of use |
| US5314406A (en) | 1992-10-09 | 1994-05-24 | Symbiosis Corporation | Endoscopic electrosurgical suction-irrigation instrument |
| PT696176E (pt) * | 1993-04-28 | 2002-10-31 | Biosense Webster Inc | Cateter de electrofisiologia com ponta pre-curvada |
| US6235020B1 (en) | 1993-05-10 | 2001-05-22 | Arthrocare Corporation | Power supply and methods for fluid delivery in electrosurgery |
| US5458596A (en) * | 1994-05-06 | 1995-10-17 | Dorsal Orthopedic Corporation | Method and apparatus for controlled contraction of soft tissue |
| US5617854A (en) * | 1994-06-22 | 1997-04-08 | Munsif; Anand | Shaped catheter device and method |
| US5785705A (en) * | 1994-10-11 | 1998-07-28 | Oratec Interventions, Inc. | RF method for controlled depth ablation of soft tissue |
| US6106524A (en) * | 1995-03-03 | 2000-08-22 | Neothermia Corporation | Methods and apparatus for therapeutic cauterization of predetermined volumes of biological tissue |
| WO1996034646A1 (en) * | 1995-05-01 | 1996-11-07 | Medtronic Cardiorhythm | Dual curve ablation catheter and method |
| US5823955A (en) * | 1995-11-20 | 1998-10-20 | Medtronic Cardiorhythm | Atrioventricular valve tissue ablation catheter and method |
| US6126682A (en) * | 1996-08-13 | 2000-10-03 | Oratec Interventions, Inc. | Method for treating annular fissures in intervertebral discs |
| US6258086B1 (en) * | 1996-10-23 | 2001-07-10 | Oratec Interventions, Inc. | Catheter for delivery of energy to a surgical site |
| US6096036A (en) * | 1998-05-05 | 2000-08-01 | Cardiac Pacemakers, Inc. | Steerable catheter with preformed distal shape and method for use |
| EP0964650A1 (en) * | 1997-02-12 | 1999-12-22 | Oratec Interventions, Inc. | Electrode for electrosurgical ablation of tissue and method of manufacturing the same |
| DE69923291T2 (de) * | 1998-02-19 | 2005-06-09 | Curon Medical Inc., Sunnyvale | Elektrochirurgische vorrichtung zur behandlung von schliessmuskeln |
| US6086584A (en) * | 1998-09-10 | 2000-07-11 | Ethicon, Inc. | Cellular sublimation probe and methods |
| JP2000135221A (ja) * | 1998-11-02 | 2000-05-16 | Olympus Optical Co Ltd | 電極付処置具 |
| US6319250B1 (en) * | 1998-11-23 | 2001-11-20 | C.R. Bard, Inc | Tricuspid annular grasp catheter |
| DE1133264T1 (de) * | 1998-11-23 | 2002-07-04 | C.R. Bard, Inc. | Endokardialer greifkatheter |
| KR102684047B1 (ko) | 2018-07-13 | 2024-07-12 | 에스케이하이닉스 주식회사 | 메모리 시스템 및 메모리 시스템의 동작방법 |
-
2000
- 2000-10-03 US US09/679,394 patent/US7070596B1/en not_active Expired - Lifetime
-
2001
- 2001-05-15 WO PCT/US2001/015728 patent/WO2002011635A1/en active Application Filing
- 2001-05-15 EP EP01935554A patent/EP1309282A4/en not_active Withdrawn
- 2001-05-15 JP JP2002516975A patent/JP4986006B2/ja not_active Expired - Fee Related
- 2001-05-15 AU AU2001261637A patent/AU2001261637A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| WO2002011635A1 (en) | 2002-02-14 |
| JP2004505663A (ja) | 2004-02-26 |
| AU2001261637A1 (en) | 2002-02-18 |
| US7070596B1 (en) | 2006-07-04 |
| EP1309282A4 (en) | 2006-03-08 |
| EP1309282A1 (en) | 2003-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4986006B2 (ja) | 脊椎の不整を治療する装置 | |
| US6602248B1 (en) | Methods for repairing damaged intervertebral discs | |
| US7179255B2 (en) | Methods for targeted electrosurgery on contained herniated discs | |
| US7387625B2 (en) | Methods and apparatus for treating intervertebral discs | |
| US7393351B2 (en) | Apparatus and methods for treating cervical inter-vertebral discs | |
| US6837884B2 (en) | Electrosurgical apparatus having compound return electrode | |
| US6726684B1 (en) | Methods for electrosurgical spine surgery | |
| US7331956B2 (en) | Methods and apparatus for treating back pain | |
| US7270659B2 (en) | Methods for electrosurgical treatment of spinal tissue | |
| US6772012B2 (en) | Methods for electrosurgical treatment of spinal tissue | |
| US7708733B2 (en) | Electrosurgical method and apparatus for removing tissue within a bone body | |
| US6464695B2 (en) | Method for electrosurgical treatment of intervertebral discs | |
| JP4290894B2 (ja) | 椎間板の電気外科的治療用のシステムおよび方法 | |
| US20050261754A1 (en) | Methods and apparatus for treating back pain | |
| US20040116922A1 (en) | Methods and apparatus for treating intervertebral discs | |
| US20030130738A1 (en) | System and method for repairing a damaged intervertebral disc |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080515 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101221 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110318 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110328 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110526 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110726 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20111025 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20111101 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120403 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120418 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150511 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |