JP4981966B2 - 放射線治療装置制御方法および放射線治療装置制御装置 - Google Patents
放射線治療装置制御方法および放射線治療装置制御装置 Download PDFInfo
- Publication number
- JP4981966B2 JP4981966B2 JP2010512433A JP2010512433A JP4981966B2 JP 4981966 B2 JP4981966 B2 JP 4981966B2 JP 2010512433 A JP2010512433 A JP 2010512433A JP 2010512433 A JP2010512433 A JP 2010512433A JP 4981966 B2 JP4981966 B2 JP 4981966B2
- Authority
- JP
- Japan
- Prior art keywords
- correction
- image
- transmission image
- correction amount
- gradation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001959 radiotherapy Methods 0.000 title claims description 159
- 238000000034 method Methods 0.000 title claims description 63
- 238000012937 correction Methods 0.000 claims description 334
- 235000019557 luminance Nutrition 0.000 claims description 110
- 230000005540 biological transmission Effects 0.000 claims description 79
- 230000005855 radiation Effects 0.000 claims description 75
- 238000013519 translation Methods 0.000 claims description 60
- 238000001514 detection method Methods 0.000 claims description 56
- 230000001225 therapeutic effect Effects 0.000 claims description 56
- 238000003384 imaging method Methods 0.000 claims description 26
- 238000009826 distribution Methods 0.000 claims description 15
- 210000000988 bone and bone Anatomy 0.000 description 12
- 238000012795 verification Methods 0.000 description 9
- 238000004590 computer program Methods 0.000 description 8
- 238000004364 calculation method Methods 0.000 description 7
- 210000000056 organ Anatomy 0.000 description 7
- 238000002834 transmittance Methods 0.000 description 7
- 239000000284 extract Substances 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000004891 communication Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 238000003745 diagnosis Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 206010028980 Neoplasm Diseases 0.000 description 2
- 230000001154 acute effect Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000001678 irradiating effect Effects 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 210000000278 spinal cord Anatomy 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1064—Monitoring, verifying, controlling systems and methods for adjusting radiation treatment in response to monitoring
- A61N5/1069—Target adjustment, e.g. moving the patient support
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21K—TECHNIQUES FOR HANDLING PARTICLES OR IONISING RADIATION NOT OTHERWISE PROVIDED FOR; IRRADIATION DEVICES; GAMMA RAY OR X-RAY MICROSCOPES
- G21K5/00—Irradiation devices
- G21K5/10—Irradiation devices with provision for relative movement of beam source and object to be irradiated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1049—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam
- A61N2005/1061—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam using an x-ray imaging system having a separate imaging source
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Pathology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- High Energy & Nuclear Physics (AREA)
- Radiation-Therapy Devices (AREA)
Description
本発明の他の課題は、被検体の位置をより高速に調整する放射線治療装置制御方法および放射線治療装置制御装置を提供することにある。
2 :放射線治療装置制御装置
3 :放射線治療装置
11:旋回駆動装置
12:Oリング
14:走行ガントリ
15:首振り装置
16:放射線照射装置
17:回転軸
18:回転軸
19:アイソセンタ
20:マルチリーフコリメータ
21:チルト軸
22:パン軸
23:治療用放射線
24:第1診断用X線源
25:第2診断用X線源
32:第1センサアレイ
33:第2センサアレイ
35:第1診断用X線
36:第2診断用X線
41:カウチ
42:カウチ駆動装置
43:患者
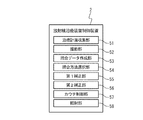
51:治療計画収集部
52:撮影部
53:照合データ作成部
54:照合方法選択部
55:第1補正部
56:第2補正部
57:カウチ制御部
58:照射部
61:第1DRR画像
63:第1部位像
62:第2部位像
64:第3部位像
66:第1テンプレート領域
67:第2テンプレート領域
71:第1X線画像
73:第1部位像
72:第2部位像
74:第3部位像
Claims (14)
- 第1部位と第2部位とを有する被検体の透過画像により示される前記第1部位の位置と向きとに基づいて回転補正量と第1並進補正量とを算出するステップと、
前記透過画像により示される前記第2部位の位置と向きと前記回転補正量とに基づいて第2並進補正量とを算出するステップとを具備し、
前記回転補正量と前記第1並進補正量とは、前記被検体が配置されるカウチが前記回転補正量だけ回転移動するときに、かつ、前記カウチが前記第1並進補正量だけ平行移動するときに、前記第1部位が所定の部位に配置されるように、算出され、
前記第2並進補正量は、前記被検体が配置されるカウチが前記回転補正量だけ回転移動するときに、かつ、前記カウチが前記第2並進補正量だけ平行移動するときに、前記第2部位が所定の部位に配置されるように、算出され、
前記第1部位は、前記第2部位より大きい
放射線治療装置制御方法。 - 請求の範囲1において、
前記被検体の治療計画用3次元データを収集するステップをさらに具備し、
前記回転補正量と前記第1並進補正量とは、前記透過画像のうちの前記治療計画用3次元データに基づいて算出される第1テンプレートにマッチングする第1検出領域に基づいて算出され、
前記第2並進補正量は、前記透過画像のうちの前記治療計画用3次元データに基づいて算出される第2テンプレートにマッチングする第2検出領域と前記回転補正量とに基づいて算出される
放射線治療装置制御方法。 - 請求の範囲2において、
前記第1検出領域は、特徴点照合により算出され、
前記第2検出領域は、前記特徴点照合と異なるパターン照合により算出される
放射線治療装置制御方法。 - 請求の範囲2または請求の範囲3のいずれかにおいて、
前記第1検出領域は、前記透過画像から変換された第1輝度レンジ補正後透過画像に基づいて算出され、
前記第1輝度レンジ補正後透過画像が示す複数の輝度が取り得る範囲は、前記透過画像が示す複数の輝度が取り得る範囲より狭く、
前記第2検出領域は、前記透過画像から変換された第2輝度レンジ補正後透過画像に基づいて算出され、
前記第2輝度レンジ補正後透過画像が示す複数の輝度が取り得る範囲は、前記透過画像が示す複数の輝度が取り得る範囲より狭い
放射線治療装置制御方法。 - 請求の範囲2〜請求の範囲4のいずれかにおいて、
前記第1検出領域は、前記透過画像から変換された階調粗さ補正後透過画像に基づいて算出され、
前記透過画像の階調は、前記階調粗さ補正後透過画像の階調より細かい
放射線治療装置制御方法。 - 請求の範囲2〜請求の範囲5のいずれかにおいて、
前記第1検出領域は、階調補正後透過画像が示す複数の輝度の度数分布が前記治療計画用3次元データから算出されるDRR画像が示す複数の輝度の度数分布に概ね一致するように、前記透過画像から変換された前記階調補正後透過画像に基づいて算出され、
前記第2検出領域は、前記階調補正後透過画像に基づいて算出される
放射線治療装置制御方法。 - 第1部位と第2部位とを有する被検体の透過画像を撮影する撮影部と、
前記透過画像により示される前記第1部位の位置と向きとに基づいて回転補正量と第1並進補正量とを算出する第1補正部と、
前記透過画像により示される前記第2部位の位置と向きと前記回転補正量とに基づいて第2並進補正量とを算出する第2補正部と、
前記被検体が配置されるカウチが前記回転補正量だけ回転移動するように、かつ、前記カウチが前記第2並進補正量だけ平行移動するように、前記カウチを駆動するカウチ駆動装置を制御するカウチ制御部とを具備し、
前記第1部位は、前記第2部位より大きい
放射線治療装置制御装置。 - 請求の範囲7において、
前記被検体の治療計画用3次元データを収集する治療計画収集部をさらに具備し、
前記第1補正部は、前記透過画像のうちの前記治療計画用3次元データに基づいて算出される第1テンプレートにマッチングする第1検出領域に基づいて前記回転補正量と前記第1並進補正量とを算出し、
前記第2補正部は、前記透過画像のうちの前記治療計画用3次元データに基づいて算出される第2テンプレートにマッチングする第2検出領域と前記回転補正量とに基づいて前記第2並進補正量を算出する
放射線治療装置制御装置。 - 請求の範囲8において、
前記第1補正部は、特徴点照合により前記第1検出領域を算出し、
前記第2補正部は、前記特徴点照合と異なるパターン照合により前記第2検出領域を算出する
放射線治療装置制御装置。 - 請求の範囲8または請求の範囲9のいずれかにおいて、
前記第1補正部は、前記透過画像から変換された第1輝度レンジ補正後透過画像に基づいて前記第1検出領域を算出し、
前記第1輝度レンジ補正後透過画像が示す複数の輝度が取り得る範囲は、前記透過画像が示す複数の輝度が取り得る範囲より狭く、
前記第2補正部は、前記透過画像から変換された第2輝度レンジ補正後透過画像に基づいて前記第2検出領域を算出し、
前記第2輝度レンジ補正後透過画像が示す複数の輝度が取り得る範囲は、前記透過画像が示す複数の輝度が取り得る範囲より狭い
放射線治療装置制御装置。 - 請求の範囲8〜請求の範囲10のいずれかにおいて、
前記第1補正部は、前記透過画像から変換された階調粗さ補正後透過画像に基づいて前記第1検出領域を算出し、
前記透過画像の階調は、前記階調粗さ補正後透過画像の階調より細かい
放射線治療装置制御装置。 - 請求の範囲8〜請求の範囲11のいずれかにおいて、
前記第1補正部は、階調補正後透過画像が示す複数の輝度の度数分布が前記治療計画用3次元データから算出されるDRR画像が示す複数の輝度の度数分布に概ね一致するように、前記透過画像から変換された前記階調補正後透過画像に基づいて前記第1検出領域を算出し、
前記第2補正部は、前記階調補正後透過画像に基づいて前記第2検出領域を算出する
放射線治療装置制御装置。 - 請求の範囲7〜請求の範囲12のいずれかにおいて、
前記第2部位に治療用放射線が曝射されるように、治療用放射線照射装置を制御する照射部
をさらに具備する放射線治療装置制御装置。 - 請求の範囲13において、
前記照射部は、前記透過画像を撮影したイメージャを用いて前記被検体の他の透過画像を撮影した後に、前記第2部位に治療用放射線が曝射されるように、前記治療用放射線照射装置を駆動する首振り装置を前記他の透過画像に基づいて制御する
放射線治療装置制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2009/069587 WO2011061827A1 (ja) | 2009-11-18 | 2009-11-18 | 放射線治療装置制御方法および放射線治療装置制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4981966B2 true JP4981966B2 (ja) | 2012-07-25 |
| JPWO2011061827A1 JPWO2011061827A1 (ja) | 2013-04-04 |
Family
ID=44059328
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010512433A Active JP4981966B2 (ja) | 2009-11-18 | 2009-11-18 | 放射線治療装置制御方法および放射線治療装置制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8471222B2 (ja) |
| JP (1) | JP4981966B2 (ja) |
| WO (1) | WO2011061827A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5677738B2 (ja) * | 2009-12-24 | 2015-02-25 | 株式会社東芝 | X線コンピュータ断層撮影装置 |
| GB201107385D0 (en) * | 2011-05-04 | 2011-06-15 | Materialise Nv | Medical imaging calibration device |
| JP6049433B2 (ja) * | 2012-12-07 | 2016-12-21 | 三菱重工業株式会社 | 制御情報生成装置、放射線治療装置、放射線治療システムおよび制御情報生成方法 |
| JP6668902B2 (ja) * | 2016-04-12 | 2020-03-18 | 株式会社島津製作所 | 位置決め装置および位置決め装置の作動方法 |
| US10434335B2 (en) * | 2017-03-30 | 2019-10-08 | Shimadzu Corporation | Positioning apparatus and method of positioning by generation of DRR image from X-ray CT image data |
| JP7140320B2 (ja) * | 2017-12-20 | 2022-09-21 | 国立研究開発法人量子科学技術研究開発機構 | 医用装置、医用装置の制御方法、およびプログラム |
| JP6996711B2 (ja) * | 2018-03-20 | 2022-01-17 | 国立研究開発法人量子科学技術研究開発機構 | 医用画像処理装置、治療システム、および医用画像処理プログラム |
| DE102018008806A1 (de) * | 2018-11-09 | 2020-05-14 | Städtisches Klinikum Dessau | Verfahren zur echtheitsbezogenen Korrektur der räumlichen Lage des Zentralstrahles von Strahlentherapiegeräten und der Patientenposition |
| US12109438B2 (en) * | 2018-12-26 | 2024-10-08 | Our United Corporation | Positioning method realized by computer, and radiotherapy system |
| GB2594678B (en) * | 2019-12-18 | 2023-06-14 | Elekta ltd | A radiotherapy apparatus for delivery radiation to a subject |
| US20240153134A1 (en) * | 2022-01-07 | 2024-05-09 | Brainlab Ag | Method for monitoring a subject position |
| CN115486863A (zh) * | 2022-09-26 | 2022-12-20 | 北京纳米维景科技有限公司 | 一种具有管电流调制功能的静态ct成像设备及其成像方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001259060A (ja) * | 2000-03-21 | 2001-09-25 | Sumitomo Heavy Ind Ltd | 患者位置ずれ計測方法、装置、及び、これを用いた患者位置決め方法、装置、並びに放射線治療装置 |
| JP2006198119A (ja) * | 2005-01-20 | 2006-08-03 | Hitachi Ltd | 放射線治療装置 |
| WO2007029520A1 (ja) * | 2005-09-01 | 2007-03-15 | Hitachi, Ltd. | 放射線治療装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3031990B2 (ja) | 1990-10-19 | 2000-04-10 | 同仁医薬化工株式会社 | 消炎鎮痛クリーム剤組成物 |
| JPH04310319A (ja) | 1991-04-05 | 1992-11-02 | Mitsubishi Electric Corp | 放電加工装置 |
| US6768782B1 (en) * | 2002-12-16 | 2004-07-27 | University Of Notre Dame Du Lac | Iterative method for region-of-interest reconstruction |
| JP5017909B2 (ja) * | 2005-06-22 | 2012-09-05 | コニカミノルタエムジー株式会社 | 領域抽出装置、領域抽出方法及びプログラム |
| JP4126318B2 (ja) * | 2006-06-23 | 2008-07-30 | 三菱重工業株式会社 | 放射線治療装置制御装置および放射線治療装置の制御方法 |
-
2009
- 2009-11-18 WO PCT/JP2009/069587 patent/WO2011061827A1/ja active Application Filing
- 2009-11-18 US US12/808,312 patent/US8471222B2/en active Active
- 2009-11-18 JP JP2010512433A patent/JP4981966B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001259060A (ja) * | 2000-03-21 | 2001-09-25 | Sumitomo Heavy Ind Ltd | 患者位置ずれ計測方法、装置、及び、これを用いた患者位置決め方法、装置、並びに放射線治療装置 |
| JP2006198119A (ja) * | 2005-01-20 | 2006-08-03 | Hitachi Ltd | 放射線治療装置 |
| WO2007029520A1 (ja) * | 2005-09-01 | 2007-03-15 | Hitachi, Ltd. | 放射線治療装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110313228A1 (en) | 2011-12-22 |
| JPWO2011061827A1 (ja) | 2013-04-04 |
| US8471222B2 (en) | 2013-06-25 |
| WO2011061827A1 (ja) | 2011-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4981966B2 (ja) | 放射線治療装置制御方法および放射線治療装置制御装置 | |
| JP4310319B2 (ja) | 放射線治療装置制御装置および放射線照射方法 | |
| JP6181459B2 (ja) | 放射線治療システム | |
| JP5397861B2 (ja) | 放射線治療計画装置および放射線治療計画装置の作動方法 | |
| JP4444338B2 (ja) | 放射線治療装置制御装置および放射線照射方法 | |
| JP5472757B2 (ja) | 放射線治療装置制御装置、特定部位位置計測方法、および、放射線治療装置制御装置の作動方法 | |
| US8300766B2 (en) | Radio tomography imaging method | |
| JP2007236760A (ja) | 放射線治療装置制御装置および放射線照射方法 | |
| WO2012042969A1 (ja) | 放射線治療装置制御装置および放射線治療装置制御方法 | |
| JP2010183976A (ja) | 放射線治療装置制御装置および放射線照射方法 | |
| JP5916434B2 (ja) | 治療計画装置及び治療計画方法並びにそのプログラム | |
| JP6895757B2 (ja) | 放射線治療システム及び患者位置確認システム | |
| JP2008022896A (ja) | 位置決め装置 | |
| JP5010740B2 (ja) | 放射線治療装置制御方法および放射線治療装置制御装置 | |
| JP2012045163A (ja) | 放射線治療装置制御装置および放射線治療装置制御方法 | |
| JP2006051199A (ja) | 放射線治療装置、放射線治療装置の患部追尾方法及びイメージング画像の画質向上方法 | |
| WO2013129442A1 (ja) | 放射線治療装置制御装置、放射線治療装置制御方法及び放射線治療装置のコンピュータに実行されるプログラム | |
| JP4727737B2 (ja) | 放射線治療装置制御装置および目的部位位置計測方法 | |
| JP5124045B2 (ja) | 放射線治療装置制御装置および特定部位位置計測方法 | |
| JP5078972B2 (ja) | 放射線治療装置制御方法および放射線治療装置制御装置 | |
| JP4898901B2 (ja) | 放射線治療装置制御装置および放射線照射方法 | |
| JP2012030005A (ja) | 放射線治療装置制御装置および放射線治療装置制御方法 | |
| WO2011099198A1 (ja) | 放射線治療装置制御装置および放射線治療装置の作動方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120406 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120420 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150427 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4981966 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |