JP4976439B2 - レーダ装置 - Google Patents
レーダ装置 Download PDFInfo
- Publication number
- JP4976439B2 JP4976439B2 JP2009063924A JP2009063924A JP4976439B2 JP 4976439 B2 JP4976439 B2 JP 4976439B2 JP 2009063924 A JP2009063924 A JP 2009063924A JP 2009063924 A JP2009063924 A JP 2009063924A JP 4976439 B2 JP4976439 B2 JP 4976439B2
- Authority
- JP
- Japan
- Prior art keywords
- pulse
- output
- signal
- generation source
- predetermined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Radar Systems Or Details Thereof (AREA)
Description
上記のような構成でも、所定の距離範囲の測定を短時間で処理することができる。
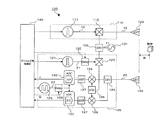
本発明の第1の実施形態に係るレーダ装置の構成を、図1を用いて説明する。図1は、本実施形態のレーダ装置100の構成を示すブロック図である。レーダ装置100は、所定の周波数(fcとする)の搬送波を発振する発振器101と、発振器101から出力される搬送波の電力を2つの出力に分配する第1の電力分配器102と、所定の送信信号を生成する送信部110と、送信部110から入力した送信信号を電波で空間に送出する送信アンテナ103と、送信アンテナ103から送出された電波が物体で反射され、その反射電波を受信する受信アンテナ104と、受信アンテナ104から受信信号を入力して所定の信号処理を行う受信部120と、受信部120から入力した信号をもとに物体の検出を行うとともに、送信部110及び受信部120の制御を行うデジタル信号処理部140と、を備えている。
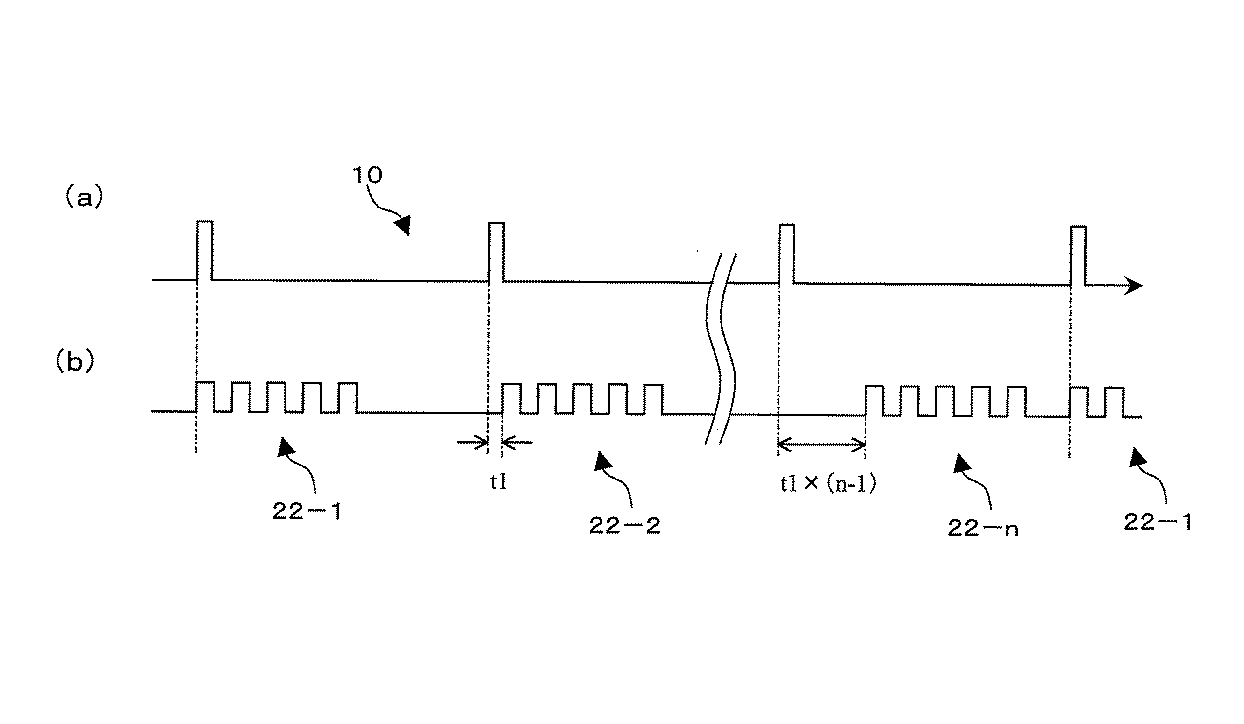
なお、上記では、クロック信号列22について説明したが、相関パルス列21についても、クロック信号列22に同期して5個(L個)の相関パルス21aからなる相関パルス列21−i(i=1,・・・,n)が、単位遅延時間t1ずつ順次遅延されてn回にわたり出力される。
なお、上記では、説明の簡略化のために1つの送信パルス12aが送出される度に遅延時間tdを更新するものとして説明したが、より一般的には同じ遅延時間tdでM個(Mは正の整数)の送信パルス12aによるM回(以下ではMを同期加算数という)の測定を行ってサンプリング結果を足し込んだ後に遅延時間tdを更新するようにすることもできる。Mを2以上とすることにより、同じレンジビンについて複数回(M回)測定することになり、S/Nを改善することができる。
これにより、1番目から50番目までのすべてのレンジビンのサンプリングを行うことができる。各レンジビンのデータをデジタル信号処理部140に出力した後、各レンジビンを初期化し、新たなサンプリングを開始する。以降のパルス送信に対しては、再びクロック信号列22−1を用いたサンプリングに戻る。
なお、同期加算数Mが2以上の場合には、各クロック信号列22−iを連続してM回用いてサンプリングを行ってサンプリング結果を足し込み、その後次のクロック信号列22−(i+1)を用いたサンプリングに進む。
本発明の第2の実施形態に係るレーダ装置の構成を、図11を用いて説明する。図11は、第2の実施形態のレーダ装置200の構成を示すブロック図である。レーダ装置200は、第1の実施形態のレーダ装置100の一部を変更した構成となっている。一般に、周波数が高くなると用いる部品が高価なものになる。そこで、本実施形態では発振器201、第1の電力分配器202、第1のパルスモジュレータ212、第2のパルスモジュレータ223の周波数帯を使用する無線周波数帯の1/N(Nは2以上の整数)とするとともに、逓倍率Nの第1の逓倍器213及び第2の逓倍器231を追加している。
本実施形態では、第1のパルスモジュレータ212と第1の逓倍器213により、発振器201で生成される搬送波を2段階で切り出すことになることから、送信信号へのキャリアリークを低減させる効果もある。また、逓倍器は非線形デバイスであり、より効率よくキャリアリークを低減することができる。
本発明の第2の実施形態に係るレーダ装置の構成を、図12を用いて説明する。図12は、第3実施形態のレーダ装置300の構成を示すブロック図である。レーダ装置300は、第1の実施形態のレーダ装置100とは第2のパルスモジュレータの位置が異なっている(本実施形態では、第2のパルスモジュレータを符号323で示す)。送信部110で送信信号を生成する過程や、受信部320における受信信号、相関パルス、クロック信号の処理、及び等価サンプリングの処理内容は第1の実施形態と同じである。以下では、第1の実施形態のレーダ装置100と異なる点を中心に、本実施形態の受信部320の処理を説明する。
しかしながら、広帯域なデバイスは高価であり、できるだけ安価なデバイスで構成することが要求される。一方、安価なデバイスは広帯域な周波数特性をもっておらず、パルスのもつ高周波成分が遮断されて、パルス形状が崩れてしまう。その結果、物体の検出分解能が低下してしまう問題が発生する。
101、201 発振器
102、202,302 第1の電力分配器
103 送信アンテナ
104、204 受信アンテナ
110、210 送信部
111、211、214 パルス発生源
112、212 第1のパルスモジュレータ
120、220、320 受信部
121 相関パルス発生源
122 第1の遅延素子
123、223、323 第2のパルスモジュレータ
124 第2の電力分配器
125 位相器
126 ミキサ
127 電力増幅器
128 クロック発生源
129 第2の遅延素子
130 A/Dコンバータ
140 デジタル信号処理部
213、231 逓倍器
232 ハイブリッド回路
233 アンテナ切替スイッチ
Claims (7)
- 所定の周波数の搬送波を発振する発振器と、前記発振器から出力される搬送波の電力を2つの出力に分配する第1の電力分配器と、前記第1の電力分配器で分配された一方の搬送波を入力して所定の送信信号を生成する送信部と、前記送信部から前記送信信号を入力して電波で空間に送出する送信アンテナと、前記送信アンテナから送出された電波が物体で反射された反射電波を受信する受信アンテナと、前記受信アンテナから受信信号を入力するとともに前記第1の電力分配器で分配された他方の搬送波を入力して所定の信号処理を行う受信部と、前記受信部から入力した信号をもとに物体の検出を行うデジタル信号処理部と、を備えるレーダ装置であって、
前記送信部は、
所定のパルス幅のパルスを所定のパルス繰返し周期で発生させるパルス発生源と、
前記パルスに前記一方の搬送波を重畳させて前記送信信号を出力する第1のパルスモジュレータと、を備え、
前記受信部は、
前記パルス発生源に同期させて、前記パルス1つに対し前記所定のパルス幅と同一のパルス幅を有する相関パルスを所定の時間間隔(Ts)でL回(Lは2以上の整数)だけ発生させる相関パルス発生源と、
前記相関パルス発生源から出力される前記相関パルスを所定の遅延時間(td)だけ遅延させて出力する第1の遅延素子と、
前記第1の遅延素子から出力される相関パルスに前記他方の搬送波を重畳させる第2のパルスモジュレータと、
前記受信アンテナから入力した受信信号を2つの受信信号に分配する第2の電力分配器と、
前記第2のパルスモジュレータの出力を入力して位相が不変の第1の出力と90度ずれた第2の出力を出力する位相器と、
前記第1の出力と第2の出力をそれぞれ前記第2の電力分配器で分配された前記2つの受信信号と掛け合わせる2つのミキサと、
前記2つのミキサのそれぞれの出力電力を増幅する2つの電力増幅器と、
前記相関パルス発生源と同期させてクロック信号を生成するクロック発生源と、
前記クロック信号を前記遅延時間tdだけ遅延させる第2の遅延素子と、
前記第2の遅延素子から出力されるクロック信号のタイミングで前記2つの電力増幅器の出力をそれぞれサンプリングする2つのA/Dコンバータと、を備え、
前記A/Dコンバータは、前記送信アンテナから前記送信信号の電波が送出される度に、前記クロック信号によるサンプリングを前記L回行う
ことを特徴とするレーダ装置。 - 前記遅延時間tdは、前記送信アンテナから前記送信信号の電波がM回(Mは2以上の整数)送出される毎に更新される
ことを特徴とする請求項1に記載のレーダ装置。 - 前記第1の遅延素子及び前記第2の遅延素子は、初期値を0として単位遅延時間t1ずつ増加させて前記遅延時間tdを更新し、前記遅延時間が前記所定の時間間隔Ts以上になると再び0に初期化する
ことを特徴とする請求項1または2に記載のレーダ装置。 - 前記単位遅延時間t1は、前記所定のパルス幅より短い
ことを特徴とする請求項3に記載のレーダ装置。 - 前記デジタル信号処理部は、前記2つのA/Dコンバータの出力を入力して前記物体までの距離及び相対速度を算出するとともに、前記パルス発生源、前記相関パルス発生源、前記第1の遅延素子、前記第2の遅延素子、及び前記クロック発生源に対して所定の同期をとる制御を行う
ことを特徴とする請求項1乃至4のいずれか1項に記載のレーダ装置。 - 前記第1のパルスモジュレータと前記送信アンテナとの間に接続された第1の逓倍器と、
前記第1の逓倍器に接続され、該第1の逓倍器をオンオフ制御する別のパルス発生器と、
前記第2のパルスモジュレータと前記位相器との間に接続された第2の逓倍器と、をさらに備え、
前記発振器が使用周波数の1/N(Nは2以上の整数)の周波数の搬送波を発振し、前記第1の電力分配器、前記第1のパルスモジュレータ、及び前記第2のパルスモジュレータの周波数帯が前記使用周波数の1/Nであり、前記第1の逓倍器及び前記第2の逓倍器がともに入力信号の周波数をN倍に逓倍する
ことを特徴とする請求項1乃至5のいずれか1項に記載のレーダ装置。 - 所定の周波数の搬送波を発振する発振器と、前記発振器から出力される搬送波の電力を2つの出力に分配する第1の電力分配器と、前記第1の電力分配器で分配された一方の搬送波を入力して所定の送信信号を生成する送信部と、前記送信部から前記送信信号を入力して電波で空間に送出する送信アンテナと、前記送信アンテナから送出された電波が物体で反射された反射電波を受信する受信アンテナと、前記受信アンテナから受信信号を入力するとともに前記第1の電力分配器で分配された他方の搬送波を入力して所定の信号処理を行う受信部と、前記受信部から入力した信号をもとに物体の検出を行うデジタル信号処理部と、を備えるレーダ装置であって、
前記送信部は、
所定のパルス幅のパルスを所定のパルス繰返し周期で発生させるパルス発生源と、
前記パルスに前記一方の搬送波を重畳させて前記送信信号を出力する第1のパルスモジュレータと、を備え、
前記受信部は、
前記パルス発生源に同期させて、前記パルス1つに対し前記所定のパルス幅と同一のパルス幅を有する相関パルスを所定の時間間隔(Ts)でL回(Lは2以上の整数)だけ発生させる相関パルス発生源と、
前記相関パルス発生源から出力される前記相関パルスを所定の遅延時間(td)だけ遅延させて出力する第1の遅延素子と、
前記第1の遅延素子から出力される相関パルスに前記受信アンテナから入力した受信信号を重畳させる第2のパルスモジュレータと、
前記第2のパルスモジュレータの出力を2つの出力に分配する第2の電力分配器と、
前記他方の搬送波を入力して位相が不変の第1の出力と90度ずれた第2の出力を出力する位相器と、
前記第1の出力と第2の出力をそれぞれ前記第2の電力分配器で分配された前記2つの出力と掛け合わせる2つのミキサと、
前記2つのミキサのそれぞれの出力電力を増幅する2つの電力増幅器と、
前記相関パルス発生源と同期させてクロック信号を生成するクロック発生源と、
前記クロック信号を前記遅延時間tdだけ遅延させる第2の遅延素子と、
前記第2の遅延素子から出力されるクロック信号のタイミングで前記2つの電力増幅器の出力をそれぞれサンプリングする2つのA/Dコンバータと、を備え、
前記A/Dコンバータは、前記送信アンテナから前記送信信号の電波が送出される度に、前記クロック信号によるサンプリングを前記L回行う
ことを特徴とするレーダ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009063924A JP4976439B2 (ja) | 2009-03-17 | 2009-03-17 | レーダ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009063924A JP4976439B2 (ja) | 2009-03-17 | 2009-03-17 | レーダ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010216980A JP2010216980A (ja) | 2010-09-30 |
| JP4976439B2 true JP4976439B2 (ja) | 2012-07-18 |
Family
ID=42975989
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009063924A Expired - Fee Related JP4976439B2 (ja) | 2009-03-17 | 2009-03-17 | レーダ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4976439B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180025131A (ko) * | 2016-08-31 | 2018-03-08 | 한국전자통신연구원 | 펄스 레이더 장치 및 그것의 동작 방법 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101682652B1 (ko) * | 2013-05-28 | 2016-12-06 | 한국전자통신연구원 | 펄스 레이더 장치 |
| WO2015098223A1 (ja) * | 2013-12-27 | 2015-07-02 | 三菱電機株式会社 | レーダ装置及び距離速度計測方法 |
| WO2016158958A1 (ja) * | 2015-03-31 | 2016-10-06 | 古河電気工業株式会社 | パルスレーダ装置 |
| KR101770740B1 (ko) * | 2017-03-30 | 2017-08-23 | 엘아이지넥스원 주식회사 | 레인지 워크를 보상할 수 있는 탐색기 및 이의 레인지 워크 보상 방법 |
| KR20210020632A (ko) * | 2019-08-16 | 2021-02-24 | 삼성전자주식회사 | 밀리미터 웨이브를 이용하여 객체의 속성을 식별하는 전자 장치 및 그 제어 방법 |
| KR102630554B1 (ko) * | 2021-09-10 | 2024-01-29 | 그릿씨아이씨 주식회사 | 지연 동기화 루프를 이용한 초 고해상도 레이더 장치 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10142172A1 (de) * | 2001-08-29 | 2003-03-20 | Bosch Gmbh Robert | Pulsradaranordnung |
| DE10142170A1 (de) * | 2001-08-29 | 2003-03-20 | Bosch Gmbh Robert | Pulsradaranordnung |
| JP5342099B2 (ja) * | 2005-04-18 | 2013-11-13 | 古河電気工業株式会社 | 測距・通信複合システム |
-
2009
- 2009-03-17 JP JP2009063924A patent/JP4976439B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180025131A (ko) * | 2016-08-31 | 2018-03-08 | 한국전자통신연구원 | 펄스 레이더 장치 및 그것의 동작 방법 |
| KR102326229B1 (ko) * | 2016-08-31 | 2021-11-16 | 한국전자통신연구원 | 펄스 레이더 장치 및 그것의 동작 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010216980A (ja) | 2010-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4976439B2 (ja) | レーダ装置 | |
| EP2985625B1 (en) | Frequency-modulated-continuous-wave (fmcw) radar with timing synchronization | |
| Li et al. | Improved interrupted sampling repeater jamming based on DRFM | |
| CN102770781B (zh) | 脉冲雷达装置及其控制方法 | |
| JP2001133544A (ja) | レーダ装置及びそのコヒーレント積分方法 | |
| US20120268141A1 (en) | Method and arrangement for measuring the signal delay between a transmitter and a receiver | |
| EP2284565A1 (en) | Continous wave radar | |
| JP5656505B2 (ja) | レーダ装置 | |
| RU2507536C1 (ru) | Обнаружитель-измеритель когерентно-импульсных сигналов | |
| JP5460290B2 (ja) | レーダ装置 | |
| JP4711305B2 (ja) | 対象物識別装置 | |
| JP2007240485A (ja) | パルスレーダ装置及び測距方法 | |
| Azizah et al. | Signal processing of range detection for SFCW radars using matlab and GNU radio | |
| RU2293997C1 (ru) | Способ корреляционной обработки сигналов, отраженных от быстродвижущихся целей | |
| Suksmono et al. | Signal processing of range detection for SFCW radars using Matlab and GNU radio | |
| JPH08297162A (ja) | バイスタティックレーダ装置 | |
| JP5464001B2 (ja) | レーダ装置、レーダ信号処理方法及びレーダ信号処理プログラム | |
| JP3799337B2 (ja) | Fm−cwレーダ装置および該装置における妨害波除去方法 | |
| JP4754981B2 (ja) | パルスレーダ装置 | |
| JPH02165086A (ja) | レーダ装置 | |
| JP6037625B2 (ja) | レーダ干渉除去装置及びレーダ干渉除去方法 | |
| CN115685108A (zh) | 脉冲伪码体制引信体目标模拟系统及其方法 | |
| JP2015129695A (ja) | パルス圧縮レーダ装置及びそのレーダ信号処理方法 | |
| RU2513656C2 (ru) | Фазометр когерентно-импульсных сигналов | |
| RU2360265C1 (ru) | Способ радиолокационного обнаружения подвижных целей с фазовой селекцией по дальности и устройство для его реализации |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100701 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120330 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120412 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4976439 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150420 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |