JP4970447B2 - 付着された連結手段の動き程度を測定する装置 - Google Patents
付着された連結手段の動き程度を測定する装置 Download PDFInfo
- Publication number
- JP4970447B2 JP4970447B2 JP2008523801A JP2008523801A JP4970447B2 JP 4970447 B2 JP4970447 B2 JP 4970447B2 JP 2008523801 A JP2008523801 A JP 2008523801A JP 2008523801 A JP2008523801 A JP 2008523801A JP 4970447 B2 JP4970447 B2 JP 4970447B2
- Authority
- JP
- Japan
- Prior art keywords
- connecting means
- unit
- measuring
- tension
- degree
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 50
- 230000008878 coupling Effects 0.000 claims description 12
- 238000010168 coupling process Methods 0.000 claims description 12
- 238000005859 coupling reaction Methods 0.000 claims description 12
- 238000004804 winding Methods 0.000 claims description 8
- 238000010586 diagram Methods 0.000 description 13
- 239000007787 solid Substances 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/04—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring tension in flexible members, e.g. ropes, cables, wires, threads, belts or bands
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63H—TOYS, e.g. TOPS, DOLLS, HOOPS OR BUILDING BLOCKS
- A63H11/00—Self-movable toy figures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/32—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring the deformation in a solid
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/02—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness
- G01B7/04—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness specially adapted for measuring length or width of objects while moving
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63H—TOYS, e.g. TOPS, DOLLS, HOOPS OR BUILDING BLOCKS
- A63H17/00—Toy vehicles, e.g. with self-drive; ; Cranes, winches or the like; Accessories therefor
- A63H17/26—Details; Accessories
- A63H17/36—Steering-mechanisms for toy vehicles
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63H—TOYS, e.g. TOPS, DOLLS, HOOPS OR BUILDING BLOCKS
- A63H2200/00—Computerized interactive toys, e.g. dolls
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- A Measuring Device Byusing Mechanical Method (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Manipulator (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Description
Claims (12)
- 一端は装置の内部に連結されており、他端は前記装置の一側面を介して外部に位置する連結手段と、
前記連結手段の前記装置外部への引出し長さを測定する長さ検出部と
を備え、
前記長さ検出部は、
前記連結手段の一端が連結され、前記連結手段を巻き取る回転リールと、
前記連結手段が引っ張られるときに、前記リールが回転する程度を測定し、前記連結手段が引き出されてきた長さを測定する回転測定部と
を備え、
前記回転測定部は、
前記回転リールに連結され、前記回転リールの回転に対応して回転するギアと、
前記ギアに連結され、前記ギアの回転によってその抵抗値が変わる可変抵抗部と、
前記可変抵抗部の抵抗値を利用して求めたギアの回転程度により、前記連結手段が引き出されてきた長さを測定する引き出し長さ測定部と
を備えることを特徴とする付着された連結手段の動き程度を測定する装置。 - 前記回転測定部は、
前記回転リールに連結され、前記回転リールの回転に対応して回転するギアと、
前記ギアに連結され、前記ギアを回転させるモータと、
前記モータの回転角を測定することにより、前記連結手段が引き出されてきた長さを測定するエンコーダと
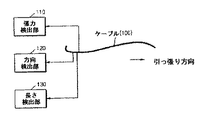
を備えることを特徴とする請求項1に記載の付着された連結手段の動き程度を測定する装置。 - 前記連結手段に加えられる外部張力により、該張力方向に実質的に直交する平面空間で、前記連結手段が上下あるいは左右に移動する程度を感知し、前記連結手段が引っ張られる方向を測定する方向検出部とをさらに備えることを特徴とする請求項1に記載の付着された連結手段の動き程度を測定する装置。
- 前記連結手段の他端が前記装置外部に引っ張り出されるときに発生する微小変化を感知し、前記連結手段に加えられた張力を検出する張力検出部をさらに備えることを特徴とする請求項1に記載の付着された連結手段の動き程度を測定する装置。
- 一端は装置の内部に連結されており、他端は前記装置の一側面を介して外部に位置する連結手段と、
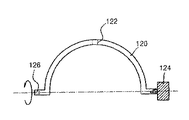
前記連結手段に加えられる外部張力により、該張力方向に実質的に直交する平面空間で、前記連結手段が上下あるいは左右に移動する程度を感知し、前記連結手段が引っ張られる方向を測定する方向検出部と
を備えることを特徴とする付着された連結手段の動き程度を測定する装置。 - 前記方向検出部は、
前記連結手段を装置の内部から外部に貫通させ、貫通された前記連結手段を前記張力によって移動させる空間を提供する移動部と、
前記移動部と連結され、前記移動部での前記連結手段の移動程度によって抵抗値が変化する可変抵抗部と、
前記可変抵抗部の抵抗値を利用し、前記連結手段が引っ張られた方向を測定する判定部と
を備えることを特徴とする請求項5に記載の付着された連結手段の動き程度を測定する装置。 - 前記可変抵抗部は、
前記移動部の移動方向のX軸成分によって抵抗値が変化する水平可変抵抗部と、
前記移動部の移動方向のY軸成分によって抵抗値が変化する垂直可変抵抗部とを備え、
前記判定部は、前記水平可変抵抗部及び垂直可変抵抗部の抵抗値を利用して連結手段が引っ張られた方向を測定することを特徴とする付着された請求項6に記載の連結手段の動き程度を測定する装置。 - 前記連結手段を装置の内部から外部に貫通させ、貫通された前記連結手段を前記張力によって移動させる空間を提供する移動部と、
前記移動部で移動する前記連結手段に力を加えるモータと、
前記モータの回転角を測定し、前記連結手段が引っ張られた方向を測定するエンコーダと
を備えることを特徴とする請求項5に記載の付着された連結手段の動き程度を測定する装置。 - 前記連結手段の他端が前記装置外部に引っ張り出されるときに発生する微小変化を感知し、前記連結手段に加えられた張力を検出する張力検出部をさらに備えることを特徴とする請求項5に記載の付着された連結手段の動き程度を測定する装置。
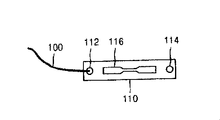
- 一端は装置の内部に連結されており、他端は前記装置の一側面を介して外部に位置する連結手段と、
前記連結手段の他端が前記装置外部に引っ張り出されるときに発生する微小変化を感知し、前記連結手段に加えられた張力を検出する張力検出部と
を備え、
前記連結手段が所定の巻き取り手段を介して装置内部に連結されるときに、前記張力検出部は、
前記連結手段と連結される連結手段連結部と、
前記巻き取り手段と連結される結着部と、
前記連結手段が引っ張られるときに、前記巻き取り手段により前記連結手段に加えられた張力によって前記張力検出部に発生する長さの変化量により、前記張力を測定する張力測定部と
を備えることを特徴とする付着された連結手段の動き程度を測定する装置。 - 前記張力測定部は、ストレイン・ゲージを備えることを特徴とする請求項10に記載の付着された連結手段の動き程度を測定する装置。
- 一端は装置の内部に連結されており、他端は前記装置の一側面を介して外部に位置する連結手段と、
前記連結手段の他端が前記装置外部に引っ張り出されるときに発生する微小変化を感知し、前記連結手段に加えられた張力を検出する張力検出部と、
前記張力により前記連結手段が前記張力方向に実質的に直交する平面空間で、前記連結手段が上下あるいは左右に移動する程度を感知し、前記連結手段が引っ張られる方向を測定する方向検出部と、
前記引っ張られた連結手段の前記装置外部への引出し長さを測定する長さ検出部と
を備えることを特徴とする付着された連結手段の動き程度を測定する装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2005-0069804 | 2005-07-29 | ||
| KR20050069804 | 2005-07-29 | ||
| PCT/KR2006/002969 WO2007013773A1 (en) | 2005-07-29 | 2006-07-28 | Apparatus for detecting the movement of its embedded attaching means |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009503494A JP2009503494A (ja) | 2009-01-29 |
| JP4970447B2 true JP4970447B2 (ja) | 2012-07-04 |
Family
ID=37683622
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008523801A Expired - Fee Related JP4970447B2 (ja) | 2005-07-29 | 2006-07-28 | 付着された連結手段の動き程度を測定する装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7681464B2 (ja) |
| EP (2) | EP2713149A1 (ja) |
| JP (1) | JP4970447B2 (ja) |
| KR (1) | KR100799573B1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009012148A (ja) * | 2007-07-09 | 2009-01-22 | Noriko Mitsuhayashi | ペット型ロボット |
| US8631696B2 (en) * | 2008-08-12 | 2014-01-21 | Enraf, B.V. | Apparatus and method for monitoring tanks in an inventory management system |
| US9336074B2 (en) | 2013-07-26 | 2016-05-10 | Honeywell International Inc. | Apparatus and method for detecting a fault with a clock source |
| KR101582732B1 (ko) | 2014-02-05 | 2016-01-06 | 한국교통대학교산학협력단 | 반려동물 건강케어 기기 |
| KR101673146B1 (ko) * | 2015-03-30 | 2016-11-07 | 한국기계연구원 | 운동기구 장력 측정기 |
| US11045174B2 (en) | 2015-09-25 | 2021-06-29 | Covidien Lp | Patient movement sensor |
| CN107831679B (zh) * | 2017-11-09 | 2021-01-01 | 深圳市终极进化科技有限公司 | 一种四足仿生机器人的人性化控制系统及其控制方法 |
| US11454974B2 (en) * | 2020-06-29 | 2022-09-27 | Baidu Usa Llc | Method, apparatus, device, and storage medium for controlling guide robot |
| CN116678276B (zh) * | 2023-08-04 | 2023-10-10 | 滨州高新高端装备制造产业园有限公司 | 一种园区建设施工测量装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3381527A (en) * | 1965-11-18 | 1968-05-07 | Nasa Usa | Tension measurement device |
| US3780440A (en) * | 1971-07-21 | 1973-12-25 | Ideal Aerosmith Inc | Measuring instrument |
| US3812589A (en) * | 1972-05-25 | 1974-05-28 | Dillon W & Co Inc | Boom length indicator |
| JPS5225114B2 (ja) * | 1972-08-14 | 1977-07-05 | ||
| US4058010A (en) * | 1976-04-06 | 1977-11-15 | Approach Fish | Airport wind shear monitoring method and apparatus |
| US4139197A (en) * | 1978-01-06 | 1979-02-13 | Windall Owen D | Practice device for hitting a ball |
| JPS61245213A (ja) | 1985-04-23 | 1986-10-31 | Kajima Corp | 自走式ロボツト |
| JPH01281262A (ja) * | 1988-05-02 | 1989-11-13 | Kumagai Gumi Co Ltd | ケーブルの巻取及び巻戻し制御方法並びにその装置 |
| JPH0659733A (ja) * | 1991-09-04 | 1994-03-04 | Nec Home Electron Ltd | 自律走行ロボット及びその電源コード搬送方法 |
| JPH07248723A (ja) * | 1994-03-08 | 1995-09-26 | Kochi Pref Gov | 魚釣りシミュレーター |
| US5551545A (en) * | 1994-03-18 | 1996-09-03 | Gelfman; Stanley | Automatic deployment and retrieval tethering system |
| SE504846C2 (sv) | 1994-09-28 | 1997-05-12 | Jan G Faeger | Styrutrustning med ett rörligt styrorgan |
| JP4032793B2 (ja) | 2002-03-27 | 2008-01-16 | ソニー株式会社 | 充電システム及び充電制御方法、ロボット装置、及び充電制御プログラム及び記録媒体 |
-
2006
- 2006-07-27 KR KR1020060070839A patent/KR100799573B1/ko not_active Expired - Fee Related
- 2006-07-28 US US11/989,609 patent/US7681464B2/en not_active Expired - Fee Related
- 2006-07-28 JP JP2008523801A patent/JP4970447B2/ja not_active Expired - Fee Related
- 2006-07-28 EP EP13196255.7A patent/EP2713149A1/en not_active Withdrawn
- 2006-07-28 EP EP13196271.4A patent/EP2713150A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| KR20070015033A (ko) | 2007-02-01 |
| US7681464B2 (en) | 2010-03-23 |
| US20090031823A1 (en) | 2009-02-05 |
| KR100799573B1 (ko) | 2008-01-31 |
| EP2713149A1 (en) | 2014-04-02 |
| JP2009503494A (ja) | 2009-01-29 |
| EP2713150A1 (en) | 2014-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4970447B2 (ja) | 付着された連結手段の動き程度を測定する装置 | |
| JP6496369B2 (ja) | 長さ測定装置 | |
| JP6310392B2 (ja) | 建築物開口被覆アセンブリを制御する方法および装置 | |
| JP5275465B2 (ja) | 電源コードの繰り出し及び格納 | |
| JP7112306B2 (ja) | 魚釣用リール | |
| US20140131502A1 (en) | Single Pull Rope Driving Device with a Positioning Effect for a Window Curtain | |
| CN116439208A (zh) | 钓鱼用系统 | |
| US20140350437A1 (en) | Position sensor, sensor arrangement and rehabilitation device | |
| JP6714754B2 (ja) | 長さ測定装置およびその制御方法 | |
| IT9048139A1 (it) | Metodo e dispositivo di avvolgimento di rocche. | |
| JP7497496B2 (ja) | 魚釣用リール | |
| KR101934081B1 (ko) | 길이 측정 장치 | |
| GB2373039A (en) | A transducer for detecting the position of a mobile unit | |
| KR102080071B1 (ko) | 길이 측정 장치 및 그 제어 방법 | |
| JP7463255B2 (ja) | 魚釣用リール及び制動装置 | |
| JP2015000523A (ja) | 環状同芯撚りコードの製造装置およびそれに用いるカセット | |
| KR102453790B1 (ko) | 낚싯대 및 스크린 낚시 시스템 | |
| KR102099098B1 (ko) | 길이 측정 장치 및 그 제어 방법 | |
| KR20200136226A (ko) | 드럼 작동유닛, 훈련용 속도측정장치 및 이를 이용한 훈련정보 제공방법 | |
| JPH05296757A (ja) | 座標検出装置 | |
| JPH026255Y2 (ja) | ||
| JP7261439B2 (ja) | 配管測定システム、配管測定装置、情報処理装置およびプログラム | |
| KR102136709B1 (ko) | 모터 토크 측정 시스템 | |
| JPS62148176A (ja) | 遠隔操作撮像装置 | |
| JPS641530Y2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110218 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110518 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110620 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120327 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120404 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150413 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4970447 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |