JP4875225B2 - 立体撮像装置 - Google Patents
立体撮像装置 Download PDFInfo
- Publication number
- JP4875225B2 JP4875225B2 JP2011527139A JP2011527139A JP4875225B2 JP 4875225 B2 JP4875225 B2 JP 4875225B2 JP 2011527139 A JP2011527139 A JP 2011527139A JP 2011527139 A JP2011527139 A JP 2011527139A JP 4875225 B2 JP4875225 B2 JP 4875225B2
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- optical axis
- distortion correction
- image
- axis deviation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003384 imaging method Methods 0.000 title claims description 266
- 230000003287 optical effect Effects 0.000 claims abstract description 275
- 238000012937 correction Methods 0.000 claims abstract description 219
- 238000000034 method Methods 0.000 claims abstract description 42
- 230000008569 process Effects 0.000 claims abstract description 36
- 238000012545 processing Methods 0.000 claims description 86
- 238000003705 background correction Methods 0.000 claims description 21
- 238000003709 image segmentation Methods 0.000 claims description 2
- 230000000875 corresponding effect Effects 0.000 description 68
- 239000004973 liquid crystal related substance Substances 0.000 description 27
- 238000001444 catalytic combustion detection Methods 0.000 description 22
- 238000001514 detection method Methods 0.000 description 19
- 230000006870 function Effects 0.000 description 10
- 230000006835 compression Effects 0.000 description 6
- 238000007906 compression Methods 0.000 description 6
- 230000004888 barrier function Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000009825 accumulation Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000011156 evaluation Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 230000006837 decompression Effects 0.000 description 2
- 230000008929 regeneration Effects 0.000 description 2
- 238000011069 regeneration method Methods 0.000 description 2
- 241000226585 Antennaria plantaginifolia Species 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images
















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B35/00—Stereoscopic photography
- G03B35/08—Stereoscopic photography by simultaneous recording
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B35/00—Stereoscopic photography
- G03B35/02—Stereoscopic photography by sequential recording
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/122—Improving the 3D impression of stereoscopic images by modifying image signal contents, e.g. by filtering or adding monoscopic depth cues
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/133—Equalising the characteristics of different image components, e.g. their average brightness or colour balance
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two 2D image sensors having a relative position equal to or related to the interocular distance
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/60—Noise processing, e.g. detecting, correcting, reducing or removing noise
- H04N25/61—Noise processing, e.g. detecting, correcting, reducing or removing noise the noise originating only from the lens unit, e.g. flare, shading, vignetting or "cos4"
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
- Studio Devices (AREA)
Description
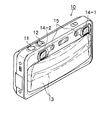
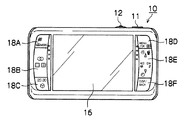
図1は本発明に係る立体撮像装置の外観を示す図であり、図1Aは立体撮像装置を前面側から見た斜視図であり、図1Bは背面図である。
図2は上記立体撮像装置10の実施形態を示すブロック図である。
次に、製品出荷前の調整時にEEPROM58に記憶させる光軸調整用の情報について説明する。
次に、本発明に係る立体撮像装置10の3D動画又は3D静止画の撮影動作について、図5に示すフローチャートを参照しながら説明する。
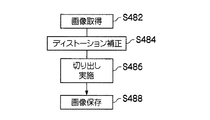
図6は図5のステップS48等における画像処理の第1の実施形態を示すフローチャートである。
図7は本発明に係る光軸調整時の処理の第2の実施形態を示すフローチャートである。尚、図3に示した第1の実施形態と共通する部分には同一のステップ番号を付し、その詳細な説明は省略する。
立体撮像装置10により取得される左右の画像は、ズームレンズのズーム位置により光軸中心がずれるが、フォーカスレンズのフォーカス位置によっても光軸中心がずれる。
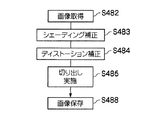
図11は図5のステップS48等における画像処理の第2の実施形態を示すフローチャートである。尚、図6の第1の実施形態と共通する部分には同一のステップ番号を付し、その詳細な説明は省略する。
連写撮影される各画像は静止画として鑑賞されるため、3D静止画と同様な画像処理が要求される。即ち、ディストーション補正は、補正精度の高いディストーション補正式による補正を実施する必要がある。
図13は連写撮影時の画像処理の第2の実施形態を示すフローチャートである。尚、図12に示した連写撮影時の画像処理の第1の実施形態と共通する部分には同一のステップ番号を付し、その詳細な説明は省略する。
図14は連写撮影時の画像処理の第3の実施形態を示すフローチャートである。尚、図12に示した連写撮影時の画像処理の第1の実施形態と共通する部分には同一のステップ番号を付し、その詳細な説明は省略する。
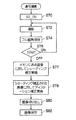
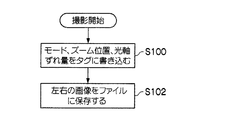
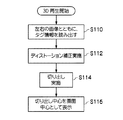
図15及び図16は本発明に係る立体撮像装置10の撮影/再生処理の第1の実施形態を示すフローチャートである。
図17及び図18は本発明に係る立体撮像装置10の撮影/再生処理の第2の実施形態を示すフローチャートである。
画像の切り出しが行われた左右の画像の切り出し中心は、ほぼ同じ被写体が存在するため、左右の画像の切り出し中心部分のMTF(modulation transfer function)測定を行い、左右の画像の解像度の差を計算する。そして、左右の画像に対する画質設定(輪郭強調、ガンマ補正)等を変更することにより、左右の画像の解像度を均一にすることができる。
Claims (16)
- 撮影光学系と該撮影光学系を介して結像される被写体像をそれぞれ光電変換する撮像素子とを有する複数の撮像部であって、互いに視差を有する複数の画像を撮像する複数の撮像部と、
複数の撮像モードごとに設定され、前記複数の撮像モードごとに補正精度の異なるディストーション補正式を記憶する第1の記憶部と、
前記第1の記憶部に記憶されたディストーション補正式のうちから、現在の撮像モードに対応するディストーション補正式を取得するディストーション補正式取得部と、
予め検出された前記複数の撮像部の各撮影光学系の光軸ずれ量であって、前記複数の撮像モードごとに設定されるディストーション補正式によりディストーション補正された後の光軸ずれ量を記憶する第2の記憶部と、
前記第2の記憶部に記憶された各撮影光学系の光軸ずれ量と現在の撮像モードとに基づき現在の撮像モードに対応する光軸ずれ量を取得する光軸ずれ量取得部と、
現在の撮像モードに応じて前記複数の撮像部から複数の画像を取得する撮像制御部と、
前記撮像制御部により取得された複数の画像に対して、前記ディストーション補正式取得部により現在の撮像モードに対応して取得されたディストーション補正式に基づいてディストーション補正を行うディストーション補正部と、
前記光軸ずれ量取得部により現在の撮像モードに対応して取得された光軸ずれ量に基づいて、前記撮像制御部により取得された複数の画像に対して立体表示用の画像の切り出し処理を行う画像切出し部と、
を備えたことを特徴とする立体撮像装置。 - 前記複数の撮影光学系の現在のズーム位置を検出するズーム位置検出部を更に有し、
前記第1の記憶部は、前記撮影光学系のズーム位置に応じた前記ディストーション補正式を記憶し、
前記ディストーション補正式取得部は、現在の撮像モード及び前記撮影光学系の現在のズーム位置に対応するディストーション補正式を前記第1の記憶部から取得することを特徴とする請求項1に記載の立体撮像装置。 - 前記第2の記憶部は、前記複数の撮影光学系のズーム位置に応じた前記各撮影光学系の光軸ずれ量を記憶し、
前記光軸ずれ量取得部は、現在の撮像モード及び前記撮影光学系の現在のズーム位置に応じて前記第2の記憶部から対応する光軸ずれ量を取得することを特徴とする請求項1又は2に記載の立体撮像装置。 - 前記第2の記憶部は、各撮影光学系の光軸ずれ量として、各撮像モード及び前記撮影光学系のズーム位置に対応するディストーション補正式によるディストーション補正後の光軸ずれ量を、各撮像モード及びズーム位置に応じて記憶し、
前記光軸ずれ量取得部は、現在の撮像モード及び現在のズーム位置に応じて前記第2の記憶部から対応する光軸ずれ量を読み出す読出部を有することを特徴とする請求項2又は3に記載の立体撮像装置。 - 前記第2の記憶部は、各撮影光学系の光軸ずれ量として、ディストーション補正前の光軸ずれ量を前記撮影光学系のズーム位置に応じて記憶し、
前記光軸ずれ量取得部は、前記第2の記憶部から現在のズーム位置に基づいて読み出した光軸ずれ量を、前記ディストーション補正式取得部により取得された現在の撮像モードに対応するディストーション補正式に代入してディストーション補正後の光軸ずれ量を算出する算出部を有することを特徴とする請求項2又は3に記載の立体撮像装置。 - 前記第2の記憶部は、各撮影光学系の光軸ずれ量として、各撮像モード及び前記撮影光学系のズーム位置に対応するディストーション補正式によるディストーション補正後の光軸ずれ量を算出するための情報を、各撮像モード毎に記憶し、
前記光軸ずれ量取得部は、現在の撮像モードに応じて前記第2の記憶部から読み出した情報と現在のズーム位置とに基づいて対応する光軸ずれ量を算出する算出部を有することを特徴とする請求項2又は3に記載の立体撮像装置。 - 前記複数の撮影光学系の現在のフォーカス位置を検出するフォーカス位置検出部を更に備え、
前記第2の記憶部は、各撮像モード及び前記撮影光学系のズーム位置に対応するディストーション補正式によるディストーション補正後の光軸ずれ量を各撮像モード、ズーム位置及びフォーカス位置に応じて記憶し、
前記光軸ずれ量取得部は、現在の撮像モード、ズーム位置及びフォーカス位置に応じて前記第2の記憶部から対応する光軸ずれ量を読み出す読出部を有することを特徴とする請求項2又は3に記載の立体撮像装置。 - 前記複数の撮影光学系の現在のフォーカス位置を検出するフォーカス位置検出部を更に備え、
前記第2の記憶部は、各撮像モード及び前記撮影光学系のズーム位置に対応するディストーション補正式によるディストーション補正後の光軸ずれ量を算出するための情報を、各撮像モード及びズーム位置に応じて記憶し、
前記光軸ずれ量取得部は、現在の撮像モード及び現在のズーム位置に応じて前記第2の記憶部から読み出した情報と現在のフォーカス位置とに基づいて対応する光軸ずれ量を算出する算出部と、を有することを特徴とする請求項2又は3に記載の立体撮像装置。 - 前記撮像制御部により取得された複数の画像のシェーディング補正を行うシェーディング補正部を更に備え、
前記画像切出し部は、前記シェーディング補正部によるシェーディング補正された画像に対して前記画像の切り出し処理を行うことを特徴とする請求項1から8のいずれかに記載の立体撮像装置。 - 前記画像切出し部は、前記ディストーション補正部によるディストーション補正後の画像に対して画像の切り出し処理を行うことを特徴とする請求項1から9のいずれかに記載の立体撮像装置。
- 前記ディストーション補正部は、前記画像切出し部により切り出し処理された画像に対してディストーション補正を行うことを特徴とする請求項1から9のいずれかに記載の立体撮像装置。
- 前記複数の撮像モードは、ライブビュー画像を表示部に表示させる動作時の撮像モード、静止画撮像モード、動画撮像モード、及びディストーション強調撮像モードのうちの2以上の撮像モードであることを特徴とする請求項1から11のいずれかに記載の立体撮像装置。
- 予め設定した枚数又は撮影指示期間中、前記複数の撮像部から時系列の複数の画像を取得する連写モードを選択する部と、
前記連写モードにより撮影中の画像を一時記憶する内部記憶部と、を備え、
前記シェーディング補正部は、前記連写モードによる撮影終了後に前記内部記憶部に記憶された複数の画像を読み出してシェーディング補正を行うことを特徴とする請求項9に記載の立体撮像装置。 - 撮影モード又は再生モードを選択するモード選択部と、
前記モード選択部により選択された撮影モード時に前記撮像制御部により取得された複数の画像とともに、前記撮像モードを示す情報及び前記光軸ずれ量取得部により取得された光軸ずれ量を示す情報を、前記取得された複数の画像に関連付けて記録媒体に記録する記録部と、を備え、
前記ディストーション補正部及び画像切出し部は、前記モード選択部により選択された再生モード時に前記記録媒体から前記複数の画像とともに、該画像に関連付けて記憶された情報を読み出し、該読み出した複数の画像に対して、前記読み出された情報に対応する前記ディストーション補正式及び光軸ずれ量に基づいてディストーション補正及び画像の切り出し処理を行うことを特徴とする請求項1から13のいずれかに記載の立体撮像装置。 - 前記記録部は、前記再生モード時に前記ディストーション補正及び画像の切り出し処理された画像を、前記記録媒体に記録することを特徴とする請求項14に記載の立体撮像装置。
- 前記複数の撮像部から出力される複数の画像間の視差量を調整する視差量調整部を備え、
前記画像切出し部は、前記立体表示用の画像の切り出し処理時に前記視差量調整部により調整された視差量に基づいて更に切り出し位置を調整した画像の切り出し処理を行うことを特徴とする請求項1から15のいずれかに記載の立体撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011527139A JP4875225B2 (ja) | 2010-03-31 | 2010-11-22 | 立体撮像装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010081051 | 2010-03-31 | ||
| JP2010081051 | 2010-03-31 | ||
| PCT/JP2010/070776 WO2011121840A1 (ja) | 2010-03-31 | 2010-11-22 | 立体撮像装置 |
| JP2011527139A JP4875225B2 (ja) | 2010-03-31 | 2010-11-22 | 立体撮像装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4875225B2 true JP4875225B2 (ja) | 2012-02-15 |
| JPWO2011121840A1 JPWO2011121840A1 (ja) | 2013-07-04 |
Family
ID=44711614
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011527139A Expired - Fee Related JP4875225B2 (ja) | 2010-03-31 | 2010-11-22 | 立体撮像装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8363091B2 (ja) |
| EP (1) | EP2458842B1 (ja) |
| JP (1) | JP4875225B2 (ja) |
| CN (1) | CN102318331B (ja) |
| BR (1) | BRPI1006035A2 (ja) |
| WO (1) | WO2011121840A1 (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080031907A1 (en) * | 2002-10-25 | 2008-02-07 | Foamix Ltd. | Cosmetic and pharmaceutical foam |
| WO2012032778A1 (ja) * | 2010-09-08 | 2012-03-15 | パナソニック株式会社 | 立体画像処理装置、立体撮像装置、立体撮像方法およびプログラム |
| JP5758138B2 (ja) * | 2011-02-01 | 2015-08-05 | シャープ株式会社 | 撮像装置、データ処理方法、およびプログラム |
| WO2013031227A1 (ja) * | 2011-09-01 | 2013-03-07 | パナソニック株式会社 | 撮像装置およびプログラム |
| US9160917B2 (en) | 2013-07-09 | 2015-10-13 | Htc Corporation | Handheld electronic apparatus and image capturing apparatus and focusing method thereof |
| JP6031755B2 (ja) | 2011-12-14 | 2016-11-24 | ソニー株式会社 | 立体画像撮像装置 |
| JP5320524B1 (ja) * | 2012-01-20 | 2013-10-23 | パナソニック株式会社 | ステレオ撮影装置 |
| JP5779512B2 (ja) * | 2012-01-24 | 2015-09-16 | 株式会社ソシオネクスト | 画像の光学歪み補正装置,画像の光学歪み補正方法,および,画像の光学歪み補正装置を有する画像生成装置 |
| US9894269B2 (en) | 2012-10-31 | 2018-02-13 | Atheer, Inc. | Method and apparatus for background subtraction using focus differences |
| JP6273764B2 (ja) * | 2012-12-28 | 2018-02-07 | 株式会社リコー | 画像処理装置 |
| JP6010870B2 (ja) * | 2013-12-24 | 2016-10-19 | カシオ計算機株式会社 | 画像補正装置、及び画像補正方法、プログラム |
| US20150215530A1 (en) * | 2014-01-27 | 2015-07-30 | Microsoft Corporation | Universal capture |
| US9804392B2 (en) | 2014-11-20 | 2017-10-31 | Atheer, Inc. | Method and apparatus for delivering and controlling multi-feed data |
| JP6494328B2 (ja) * | 2015-03-02 | 2019-04-03 | キヤノン株式会社 | 画像処理装置、撮像装置、画像処理方法、画像処理プログラム、および、記憶媒体 |
| TWI625051B (zh) * | 2017-03-21 | 2018-05-21 | 奇景光電股份有限公司 | 深度感測裝置 |
| US11083537B2 (en) | 2017-04-24 | 2021-08-10 | Alcon Inc. | Stereoscopic camera with fluorescence visualization |
| US10917543B2 (en) | 2017-04-24 | 2021-02-09 | Alcon Inc. | Stereoscopic visualization camera and integrated robotics platform |
| US10299880B2 (en) | 2017-04-24 | 2019-05-28 | Truevision Systems, Inc. | Stereoscopic visualization camera and platform |
| US10762658B2 (en) * | 2017-10-24 | 2020-09-01 | Altek Corporation | Method and image pick-up apparatus for calculating coordinates of object being captured using fisheye images |
| CN108270952B (zh) * | 2017-11-21 | 2020-08-07 | 深圳市芯舞时代科技有限公司 | 一种双目摄像机影像色差的校正方法及系统 |
| JP7350510B2 (ja) * | 2019-05-14 | 2023-09-26 | キヤノン株式会社 | 電子機器、電子機器の制御方法、プログラム、及び、記憶媒体 |
| JP2022027107A (ja) * | 2020-07-31 | 2022-02-10 | セイコーエプソン株式会社 | 画像表示方法、画像表示装置及び表示制御プログラム |
| JP2022168781A (ja) | 2021-04-26 | 2022-11-08 | キヤノン株式会社 | 電子機器、その制御方法、プログラムおよび記憶媒体 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08317424A (ja) * | 1995-05-19 | 1996-11-29 | Olympus Optical Co Ltd | 立体撮影装置 |
| JPH11355813A (ja) * | 1998-06-04 | 1999-12-24 | Honda Motor Co Ltd | カメラの内部パラメータ決定装置 |
| JP2004007304A (ja) * | 2002-06-03 | 2004-01-08 | Fuji Photo Film Co Ltd | デジタル撮影装置 |
| JP2006162991A (ja) * | 2004-12-07 | 2006-06-22 | Fuji Photo Film Co Ltd | 立体画像撮影装置 |
| WO2006064770A1 (ja) * | 2004-12-16 | 2006-06-22 | Matsushita Electric Industrial Co., Ltd. | 撮像装置 |
| JP2007282245A (ja) * | 2006-04-10 | 2007-10-25 | Sony Taiwan Ltd | 画像合成装置及び画像合成方法 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0795623A (ja) | 1993-06-25 | 1995-04-07 | Sanyo Electric Co Ltd | 立体撮像装置 |
| JPH08336165A (ja) | 1995-06-09 | 1996-12-17 | Canon Inc | 複眼撮像装置 |
| JP4012710B2 (ja) * | 2001-02-14 | 2007-11-21 | 株式会社リコー | 画像入力装置 |
| US20040001138A1 (en) | 2002-06-27 | 2004-01-01 | Weerashinghe W.A. Chaminda P. | Stereoscopic panoramic video generation system |
| JP4397573B2 (ja) | 2002-10-02 | 2010-01-13 | 本田技研工業株式会社 | 画像処理装置 |
| JP4046276B2 (ja) | 2002-10-24 | 2008-02-13 | 富士フイルム株式会社 | デジタルカメラ |
| CN101841728B (zh) * | 2003-04-17 | 2012-08-08 | 夏普株式会社 | 三维图像处理装置 |
| JPWO2004106857A1 (ja) | 2003-05-29 | 2006-07-20 | オリンパス株式会社 | ステレオ光学モジュール及びステレオカメラ |
| US7596286B2 (en) * | 2003-08-06 | 2009-09-29 | Sony Corporation | Image processing apparatus, image processing system, imaging apparatus and image processing method |
| JP3743828B2 (ja) * | 2003-10-14 | 2006-02-08 | カシオ計算機株式会社 | 電子カメラ |
| JP4104571B2 (ja) * | 2004-03-29 | 2008-06-18 | 三洋電機株式会社 | 歪曲補正装置及びこの歪曲補正装置を備えた撮像装置 |
| WO2006062325A1 (en) | 2004-12-06 | 2006-06-15 | Electronics And Telecommunications Research Institute | Apparatus for correcting image distortion of stereo-camera and method thereof |
| JP2006267768A (ja) * | 2005-03-25 | 2006-10-05 | Fuji Photo Film Co Ltd | 撮影装置および投光モジュール |
| US7920200B2 (en) * | 2005-06-07 | 2011-04-05 | Olympus Corporation | Image pickup device with two cylindrical lenses |
| CN101641951B (zh) * | 2006-09-15 | 2012-10-24 | 数字光学欧洲有限公司 | 改进影像质量的成像系统及相关方法 |
| JP4406937B2 (ja) * | 2006-12-01 | 2010-02-03 | 富士フイルム株式会社 | 撮影装置 |
| JP4714174B2 (ja) * | 2007-03-27 | 2011-06-29 | 富士フイルム株式会社 | 撮像装置 |
| JP4714176B2 (ja) * | 2007-03-29 | 2011-06-29 | 富士フイルム株式会社 | 立体撮影装置及び光軸調節方法 |
| CN101715064A (zh) * | 2008-10-06 | 2010-05-26 | 鸿富锦精密工业(深圳)有限公司 | 影像撷取装置及其影像拍摄方法 |
| JP4995854B2 (ja) * | 2009-03-11 | 2012-08-08 | 富士フイルム株式会社 | 撮像装置、画像補正方法および画像補正プログラム |
-
2010
- 2010-11-22 EP EP10838383.7A patent/EP2458842B1/en not_active Not-in-force
- 2010-11-22 CN CN201080003915.8A patent/CN102318331B/zh not_active Expired - Fee Related
- 2010-11-22 BR BRPI1006035A patent/BRPI1006035A2/pt not_active IP Right Cessation
- 2010-11-22 WO PCT/JP2010/070776 patent/WO2011121840A1/ja active Application Filing
- 2010-11-22 US US13/142,656 patent/US8363091B2/en not_active Expired - Fee Related
- 2010-11-22 JP JP2011527139A patent/JP4875225B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08317424A (ja) * | 1995-05-19 | 1996-11-29 | Olympus Optical Co Ltd | 立体撮影装置 |
| JPH11355813A (ja) * | 1998-06-04 | 1999-12-24 | Honda Motor Co Ltd | カメラの内部パラメータ決定装置 |
| JP2004007304A (ja) * | 2002-06-03 | 2004-01-08 | Fuji Photo Film Co Ltd | デジタル撮影装置 |
| JP2006162991A (ja) * | 2004-12-07 | 2006-06-22 | Fuji Photo Film Co Ltd | 立体画像撮影装置 |
| WO2006064770A1 (ja) * | 2004-12-16 | 2006-06-22 | Matsushita Electric Industrial Co., Ltd. | 撮像装置 |
| JP2007282245A (ja) * | 2006-04-10 | 2007-10-25 | Sony Taiwan Ltd | 画像合成装置及び画像合成方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2011121840A1 (ja) | 2013-07-04 |
| BRPI1006035A2 (pt) | 2016-12-06 |
| CN102318331A (zh) | 2012-01-11 |
| WO2011121840A1 (ja) | 2011-10-06 |
| EP2458842B1 (en) | 2013-12-25 |
| EP2458842A1 (en) | 2012-05-30 |
| US8363091B2 (en) | 2013-01-29 |
| CN102318331B (zh) | 2014-07-30 |
| US20110279653A1 (en) | 2011-11-17 |
| EP2458842A4 (en) | 2012-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4875225B2 (ja) | 立体撮像装置 | |
| JP4897940B2 (ja) | 立体撮像装置 | |
| JP5166650B2 (ja) | 立体撮像装置、画像再生装置及び編集ソフトウエア | |
| JP5449536B2 (ja) | 立体画像再生装置及び方法、立体撮像装置、立体ディスプレイ装置 | |
| JP5722975B2 (ja) | 撮像装置、撮像装置用シェーディング補正方法及び撮像装置用プログラム | |
| JP5449537B2 (ja) | 立体画像再生装置及び方法、立体撮像装置、立体ディスプレイ装置 | |
| WO2012132797A1 (ja) | 撮像装置及び撮像方法 | |
| JP5426262B2 (ja) | 複眼撮像装置 | |
| US9310672B2 (en) | Stereoscopic image capturing device and method of controlling thereof | |
| JP2011259168A (ja) | 立体パノラマ画像撮影装置 | |
| JP5466773B2 (ja) | 立体動画再生装置、立体動画再生プログラムならびにその記録媒体、立体ディスプレイ装置、立体撮像装置及び立体動画再生方法 | |
| JP2010237582A (ja) | 立体撮像装置および立体撮像方法 | |
| JP2010204385A (ja) | 立体撮像装置および立体撮像方法 | |
| JP2010200024A (ja) | 立体画像表示装置および立体画像表示方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111102 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111124 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4875225 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |