JP4842011B2 - 電動機の制御装置 - Google Patents
電動機の制御装置 Download PDFInfo
- Publication number
- JP4842011B2 JP4842011B2 JP2006131047A JP2006131047A JP4842011B2 JP 4842011 B2 JP4842011 B2 JP 4842011B2 JP 2006131047 A JP2006131047 A JP 2006131047A JP 2006131047 A JP2006131047 A JP 2006131047A JP 4842011 B2 JP4842011 B2 JP 4842011B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- generator
- power
- output
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/02—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles characterised by the form of the current used in the control circuit
- B60L15/025—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles characterised by the form of the current used in the control circuit using field orientation; Vector control; Direct Torque Control [DTC]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/10—Electrical machine types
- B60L2220/14—Synchronous machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/28—Four wheel or all wheel drive
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Eletrric Generators (AREA)
Description
かかる構成により、後輪のモータに急なトルク指令の立ち上がりが入力された場合においても発電機の出力落ち込みを生じることなく、安定に電力供給を行い得るものとなる。
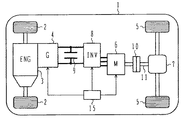
最初に、図1を用いて、本実施形態による電動機の制御装置を適用する電動4輪駆動車のシステム構成について説明する。
図1は、本発明の第1の実施形態による電動機の制御装置を適用する電動4輪駆動車のシステム構成図である。
図2は、本発明の第1の実施形態による電動機の制御装置を適用する電動4輪駆動車の電力フロー図である。なお、図2において、図1と同一符号は、同一部分を示している。
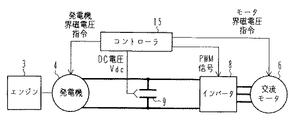
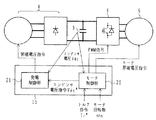
図3は、本発明の第1の実施形態による電動機の制御装置による発電機とモータ/インバータ間の電力協調制御方式のハード構成図である。図4は、本発明の第1の実施形態による電動機の制御装置による発電機とモータ/インバータ間の電力協調制御方式の制御ブロック図である。なお、図3,図4において、図1及び図2と同一符号は、同一部分を示している。
図5は、本発明の第1の実施形態による電動機の制御装置に用いる発電制御部の構成を示すブロック図である。なお、図5において、図4と同一符号は、同一部分を示している。
図6は、本発明の第1の実施形態による電動機の制御装置に用いるモータ制御部の構成を示すブロック図である。なお、図6において、図4と同一符号は、同一部分を示している。

2…前輪
3…エンジン
4…発電機
5…後輪
6…交流モータ
7…デファレンシャルギヤ
8…インバータ
9…平滑用コンデンサ
10…4WDクラッチ
15…コントローラ
20…モータ制御部
20A…電流指令マップ
20B…コンデンサ電圧指令演算部
20C…トルク指令変化率演算部
21…発電制御部
21B…PI演算器
Claims (2)
- 内燃機関により駆動される発電機が出力する直流電力を、インバータにより交流電力に変換した後、交流モータに供給することにより、前記交流モータが直接駆動されるものであり、
前記発電機は、発電された交流電力を直流電力に変換するためのダイオードブリッジが出力部分に配置されたオルタネータであり、
該オルタネータは、界磁巻線に流れる電流の制御のみによって、その発電電力を調整するものであり、
前記発電機と前記インバータの間にはバッテリが備えられないバッテリレスタイプであり、
前記発電機の界磁電圧を制御して前記発電機の出力電力を制御する制御手段を有する電動機の制御装置において、
前記制御手段は、前記交流モータに対するトルク指令の変化率が所定値以上であった場合に、前記発電機の出力電力の目標値が前記交流モータに対する駆動エネルギーの目標値を超えるように、前記発電機の出力電力の目標値を増加させるトルク指令変化率演算部を備えることを特徴とする電動機の制御装置。 - 請求項1記載の電動機の制御装置において、
前記トルク指令変化率演算部は、前記発電機のエンジン回転数に応じた最大目標電力Pmaxと現在の出力パワーPoutの差分ΔPを前記発電機からの出力電流Idcで除して、前記発電機の出力電圧の目標値の増加分を算出することを特徴とする電動機の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006131047A JP4842011B2 (ja) | 2006-05-10 | 2006-05-10 | 電動機の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006131047A JP4842011B2 (ja) | 2006-05-10 | 2006-05-10 | 電動機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007306679A JP2007306679A (ja) | 2007-11-22 |
| JP4842011B2 true JP4842011B2 (ja) | 2011-12-21 |
Family
ID=38840151
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006131047A Expired - Fee Related JP4842011B2 (ja) | 2006-05-10 | 2006-05-10 | 電動機の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4842011B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8626368B2 (en) | 2010-09-07 | 2014-01-07 | Caterpillar Inc. | Electric drive power response management system and method |
| JP2014027807A (ja) * | 2012-07-27 | 2014-02-06 | Aisin Aw Co Ltd | 誘導機制御装置 |
| JP6439745B2 (ja) * | 2016-04-28 | 2018-12-19 | トヨタ自動車株式会社 | 自動車 |
| EP3681034B1 (en) * | 2019-01-08 | 2025-02-26 | Hamilton Sundstrand Corporation | Electric propulsion systems |
| CN116323292B (zh) * | 2020-10-20 | 2025-07-11 | 日产自动车株式会社 | 驱动力控制方法及驱动力控制装置 |
| CN112140909B (zh) * | 2020-11-30 | 2021-02-09 | 宁波洁程汽车科技有限公司 | 一种应用于增程车辆的复合能量管理系统 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3050054B2 (ja) * | 1994-09-01 | 2000-06-05 | トヨタ自動車株式会社 | 発電制御方法 |
-
2006
- 2006-05-10 JP JP2006131047A patent/JP4842011B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007306679A (ja) | 2007-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4648054B2 (ja) | ハイブリッド車両,電動駆動装置用制御装置及び電動駆動装置 | |
| JP4634321B2 (ja) | 電動4輪駆動車用制御装置 | |
| US10246080B2 (en) | Hybrid vehicle control apparatus | |
| CN103155405B (zh) | 电驱动功率响应管理系统和方法 | |
| CN101336511B (zh) | 电动机驱动装置及其控制方法 | |
| CN104802788B (zh) | 混合动力车辆 | |
| JP4386451B2 (ja) | 電動車両の制御装置 | |
| US7729842B2 (en) | Electronic four-wheel drive control | |
| JP2008306800A (ja) | 発電制御装置 | |
| JP4591320B2 (ja) | モータ制御装置 | |
| JP2016208687A (ja) | 電動車両 | |
| JP4842011B2 (ja) | 電動機の制御装置 | |
| JP2004320995A (ja) | 車両用電動駆動装置及びエンジン・モータ複合型の四輪駆動装置 | |
| JP2008279810A (ja) | 車両の駆動力制御装置 | |
| JP4747961B2 (ja) | 車両用駆動制御装置 | |
| JP5023718B2 (ja) | 車両用駆動制御装置及び車両用駆動制御方法 | |
| JP6187242B2 (ja) | 車両の駆動力制御装置 | |
| KR100456850B1 (ko) | 전기자동차에서 유도 모터의 자속 제어장치 및 방법 | |
| JP2007245762A (ja) | 車両用駆動制御装置 | |
| JP2006206040A (ja) | 車両用駆動制御装置 | |
| JP2007245967A (ja) | 車両用駆動制御装置 | |
| JP2008011619A (ja) | 4輪駆動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080616 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20090828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110531 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110726 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111004 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111005 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141014 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |