JP4777093B2 - モータ駆動装置およびこれを用いた電気機器 - Google Patents
モータ駆動装置およびこれを用いた電気機器 Download PDFInfo
- Publication number
- JP4777093B2 JP4777093B2 JP2006055227A JP2006055227A JP4777093B2 JP 4777093 B2 JP4777093 B2 JP 4777093B2 JP 2006055227 A JP2006055227 A JP 2006055227A JP 2006055227 A JP2006055227 A JP 2006055227A JP 4777093 B2 JP4777093 B2 JP 4777093B2
- Authority
- JP
- Japan
- Prior art keywords
- inertia
- moment
- drive motor
- motor
- correction amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Control Of Washing Machine And Dryer (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
以下、本発明の第1実施形態について図1〜図5に基づいて詳細に説明する。第1実施形態に係るモータ駆動装置は、電気機器に搭載された3相ブラシレスモータである駆動モータ1をインバータ回路2によるインバータ制御によって駆動制御する。なお、電気機器は、収容物を収容する容器に直接駆動モータ1を取り付けたダイレクトドライブ方式を採用する。
Vq=(ω×Ld×Id)+(R×Iq)+(ω×Φ) (2)
Idは駆動モータ1の電流をdq軸からなる2相電圧に変換した際の界磁電流、Iqは駆動モータ1の電流をdq軸からなる2相電圧に変換した際のトルク電流、LqおよびLdは駆動モータ1のインダクタンス、Rは駆動モータ1の巻線抵抗、ωは駆動モータ1の角速度、Φは駆動モータ1の永久磁石による鎖交磁束数を示す。
T=P×{(Φ×Iq)+(Ld−Lq)×Id×Iq} (3)
となる。Pは極対数である。
T=P×Φ×Iq (4)
となる。すなわち、駆動モータ1を起動するとき、駆動モータ1の出力トルクTは、トルク電流Iqのみで決定することができる。また、出力トルクTとモータ回転数rとの関係は、
T−Tr=J×(dr/dt) (5)
となる。なお、Trは負荷トルク、Jは慣性モーメント、dr/dtは駆動モータ1の加速度を示す。
T(+)=P×Φ×Iq(+) (6)
T(−)=P×Φ×Iq(−) (7)
となり、(5)式に代入すると、
T(+)−Tr=J×(dω(+)/dt) (8)
T(−)−Tr=J×(dω(−)/dt) (9)
となる。駆動モータ1の加減速時において、負荷トルクTrが殆ど変化しないとすれば、(8)式、(9)式より、
T(+)−T(−)=J×{(dω(+)/dt)−(dω(−)/dt)} (10)
となる。したがって、慣性モーメントJは、
J={T(+)−T(−)}/{(dω(+)/dt)−(dω(−)/dt)} (11)
となり、この(11)式に(6)式および(7)式を代入すると
J={P×Φ×(Iq(+)−Iq(−))}/{(dω(+)/dt)−(dω(−)/dt)} (12)
となる。この(12)式において、極対数Pと鎖交磁束数Φは駆動モータ1の固有値であり、加速時の加速トルク電流Iq(+)と減速時の減速トルク電流Iq(−)は任意に設定することが可能な指令値である。すなわち、駆動モータ1の加速区間と減速区間の加速度を検出することで慣性モーメントJが演算できる。
dω(+)/dt=(ω1−ω2)/t1 (13)
dω(−)/dt=(ω3−ω4)/t2 (14)
となり、この(13)式および(14)式を(12)式に代入すると、
J={P×Φ×(Iq(+)−Iq(−))}/{((ω1−ω2)/t1)−((ω1−ω2)/t1)} (15)
となる。これにより、慣性モーメント演算部11は、慣性モーメントJを演算することができ。なお、回転数ω1、ω2、ω3、ω4は任意に決定できる変数である。
このとき、慣性モーメントJに加算する補正量は、電源電圧補正量J1と巻線温度補正量J2のいずれか一つ、もしくは、複数を加算しても良い。
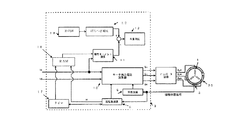
以下、本発明の第2実施形態について図6および図7に基づいて詳細に説明する。このモータ駆動装置が第1実施形態のモータ駆動装置と相違する点は、図6に示すように、駆動モータ1の巻線温度を検出していた巻線温度検出部16と、検出した巻線温度から慣性モーメントJの補正量J2を演算する巻線温度補正演算部15を持たず、モータケース1a内の温度を検出するモータケース温度検出手段であるモータケース温度検出部20と、検出されたモータケース1a内部の温度から慣性モーメントJの補正量J3を演算するモータケース温度補正演算部21を備えている点である。
以下、本発明の第3実施形態について、図8〜図11に基づいて詳細に説明する。
J4=J0−J (17)
となる。この(17)式より演算された補正量J4を第1実施形態および第2実施形態と同様に、(16)式に代入して補正した慣性モーメントJmを算出し、容量を判定する。これにより、異なるモータ駆動装置の慣性モーメントJが基準モータ駆動装置の慣性モーメントJ0と一致するので、正確な容量を判定することができる。
1a モータケース
2 インバータ回路
3 マイコン
4 ロータ位置検出部
5 回転角度演算部
6 モータ回転数演算部
7 モータ出力電圧演算部
12 容量判定部
13 電源電圧補正演算部
14 電源電圧検出部
15 巻線温度補正演算部
16 巻線温度検出部
17 タイマ
18 RAM
19 ROM
20 モータケース温度検出部
21 モータケース温度補正演算部
22 ばらつき補正演算部
Claims (5)
- 収容物を収容する容器を回転させるための駆動モータに印加電圧を出力するインバータ回路と、前記インバータ回路を制御する制御装置と、前記駆動モータの動作状況を検出する動作状況検出手段とを備え、
前記制御装置は、前記駆動モータの動作状況に基づいて、前記駆動モータの回転数から演算された前記容器の慣性モーメントを補正する慣性モーメント補正手段を備え、前記慣性モーメント補正手段は、基準となる駆動モータを動作させたときに得られる慣性モーメントを基準値とし、駆動モータを動作させたときの慣性モーメントと基準値とから演算されるばらつき補正量に基づいて慣性モーメントを補正することを特徴とするモータ駆動装置。 - 収容物を収容する容器を回転させるための駆動モータに印加電圧を出力するインバータ回路と、前記インバータ回路を制御する制御装置と、前記駆動モータの動作状況を検出する動作状況検出手段とを備え、
前記制御装置は、前記駆動モータの回転数から前記容器の慣性モーメントを演算する慣性モーメント演算手段と、検出された前記駆動モータの動作状況に基づいて 前記慣性モーメントを補正する慣性モーメント補正手段と、前記補正された慣性モーメントから前記容器に収容された収容物の容量を判定する判定手段とを備え、
前記慣性モーメント補正手段は、基準となる駆動モータを動作させたときに得られる慣性モーメントを基準値とし、駆動モータを動作させたときの慣性モーメントと基準値とから演算されるばらつき補正量に基づいて慣性モーメントを補正することを特徴とするモータ駆動装置。 - 動作状況検出手段は、インバータ回路の電源電圧を検出する電源電圧検出手段を備え、
慣性モーメント補正手段は、前記電源電圧から慣性モーメントの補正量を演算することを特徴とする請求項1または2に記載のモータ駆動装置。 - 動作状況検出手段は、駆動モータの巻線温度またはモータケースの温度を検出する温度検出手段を備え、
慣性モーメント補正手段は、前記巻線温度またはモータケースの温度から慣性モーメントの補正量を演算することを特徴とする請求項2または3に記載のモータ駆動装置。 - 請求項1〜4のいずれかに記載のモータ駆動装置を備えたことを特徴とする電気機器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006055227A JP4777093B2 (ja) | 2006-03-01 | 2006-03-01 | モータ駆動装置およびこれを用いた電気機器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006055227A JP4777093B2 (ja) | 2006-03-01 | 2006-03-01 | モータ駆動装置およびこれを用いた電気機器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007229256A JP2007229256A (ja) | 2007-09-13 |
| JP2007229256A5 JP2007229256A5 (ja) | 2008-09-18 |
| JP4777093B2 true JP4777093B2 (ja) | 2011-09-21 |
Family
ID=38550445
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006055227A Active JP4777093B2 (ja) | 2006-03-01 | 2006-03-01 | モータ駆動装置およびこれを用いた電気機器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4777093B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4666662B2 (ja) * | 2007-10-19 | 2011-04-06 | パナソニック株式会社 | 洗濯機 |
| JP2009240548A (ja) * | 2008-03-31 | 2009-10-22 | Panasonic Corp | 洗濯機 |
| JP5104671B2 (ja) * | 2008-09-02 | 2012-12-19 | パナソニック株式会社 | 洗濯機 |
| JP5104672B2 (ja) * | 2008-09-02 | 2012-12-19 | パナソニック株式会社 | 洗濯機 |
| JP5104670B2 (ja) * | 2008-09-02 | 2012-12-19 | パナソニック株式会社 | 洗濯機 |
| JP5104669B2 (ja) * | 2008-09-02 | 2012-12-19 | パナソニック株式会社 | 洗濯機 |
| JP7463635B2 (ja) * | 2016-09-30 | 2024-04-09 | ニデックパワートレインシステムズ株式会社 | 制御装置、制御方法、モータ、および電動オイルポンプ |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003210888A (ja) * | 2002-01-25 | 2003-07-29 | Sharp Corp | 洗濯機の布量検知方法、洗濯機の布量検知装置及び洗濯機 |
| JP4007161B2 (ja) * | 2002-11-01 | 2007-11-14 | 松下電器産業株式会社 | 洗濯乾燥機 |
| JP3977762B2 (ja) * | 2003-03-06 | 2007-09-19 | 株式会社東芝 | ドラム式洗濯機 |
-
2006
- 2006-03-01 JP JP2006055227A patent/JP4777093B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007229256A (ja) | 2007-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4777093B2 (ja) | モータ駆動装置およびこれを用いた電気機器 | |
| US9983253B2 (en) | Method and apparatus for identifying the winding short of bar wound electric machine at standstill condition | |
| US6163912A (en) | Washing machine | |
| CN100417004C (zh) | 电动机控制设备及使用其的洗衣机和干燥机 | |
| JP3962668B2 (ja) | ドラム式洗濯機 | |
| US8471504B2 (en) | Motor controller and electric power steering system | |
| EP2397600B1 (en) | Method for measuring the moment of inertia of a drum of a washing machine and washing machine arranged to implement said method | |
| KR101455860B1 (ko) | 세탁기 모터, 세탁기 모터의 제어방법 및 세탁기의제어방법 | |
| KR101449021B1 (ko) | 모터, 모터의 제어장치, 및 모터의 기동방법 | |
| JP2006320105A (ja) | モータ制御装置およびこれを用いた電気機器 | |
| JP4242263B2 (ja) | 洗濯機 | |
| JPH11319367A (ja) | 洗濯機 | |
| JP4666662B2 (ja) | 洗濯機 | |
| JP2010154588A (ja) | 磁束角補正機能付きモータ制御装置 | |
| JP2008154314A (ja) | モータ駆動装置およびこれを備えた洗濯機 | |
| JP4584723B2 (ja) | 洗濯機のモータ駆動装置 | |
| JP2010187537A (ja) | モータ駆動装置 | |
| EP3701076B1 (en) | Washing machine and control method of the same | |
| KR102471917B1 (ko) | 의류처리장치의 제어방법 | |
| JP2020054785A (ja) | 洗濯機 | |
| JP4679629B2 (ja) | 洗濯機 | |
| US20220372687A1 (en) | Washer and control method thereof | |
| JP2021044938A (ja) | モータ制御装置およびその制御方法 | |
| JP2020054628A (ja) | 洗濯機 | |
| EP4152592A1 (en) | Device and method for controlling a motor, especially of a washing machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080804 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100921 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101116 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110607 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110629 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4777093 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140708 Year of fee payment: 3 |