JP4760552B2 - 動きベクトル復号化方法および復号化装置 - Google Patents
動きベクトル復号化方法および復号化装置 Download PDFInfo
- Publication number
- JP4760552B2 JP4760552B2 JP2006156904A JP2006156904A JP4760552B2 JP 4760552 B2 JP4760552 B2 JP 4760552B2 JP 2006156904 A JP2006156904 A JP 2006156904A JP 2006156904 A JP2006156904 A JP 2006156904A JP 4760552 B2 JP4760552 B2 JP 4760552B2
- Authority
- JP
- Japan
- Prior art keywords
- motion vector
- decoding
- predictor
- prediction
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Landscapes
- Compression Or Coding Systems Of Tv Signals (AREA)
Description
(複数のサイズの直交変換ブロックを使用して直交変換を行う。)
2.16ビット処理を前提とした直交変換セット
(16ビットの固定小数点演算を使用して逆変換を実装し、復号化時の演算量を抑える。)
3.動き補償
(探索ブロックと、動きベクトルの検出の画素単位と、予測値生成に使用するフィルタの種類との3つのパラメータの組合せによる4つの動き補償のモードを規定する。)
4.量子化と逆量子化
(2つの量子化の方法が切り換えられる。)
5.デブロッキング・フィルタ
(ブロック境界に不連続が生じるのを防止するために、H.264/AVCと同様にデブロッキング・フィルタを導入して、ブロック境界を平滑化している。)
6.2つのインタレース符号化方式
(インタレース符号化方式としてInterlaced fieldピクチャ符号化方式と、Interlaced frameピクチャ符号化方式との2つの方式が可能とされている。)
7.Bピクチャの符号化方式
(参照するピクチャに対するBピクチャの位置関係を明示して符号化する等の特徴を有する。)
れているのと同様の用語を適宜使用する。用語の意味は、下記の通りである。
MVP:動きベクトル予測部(Motion Vector Prediction)
MV:動きベクトル(Motion Vector)
MB:マクロブロック(1MVmodeは、1MBに1MVのモードを意味し、4MVmodeは、各ブロック(8×8のサイズ)に1MVのモードを意味する。)
プリディクタMV:周囲のMB/ブロックの中から所定のアルゴリズムで検出される復号済みの動きベクトルであり、プリディクタMVを使用してカレントMB/ブロックの予測動きベクトルが求められる。
イントラMB/ブロック:動きベクトルを持たず、ブロックレイヤの情報のみで復号できるMB/ブロック
インターMB/ブロック:動きベクトルを持ち、復号のために復号済みピクチャの参照が必要なMB/ブロック
DMV:VLDがMVDATA、BLKMVDATAシンタックス要素より復号する差分ベクトル値
PMV:MVPがプリディクタMVから所定のアルゴリズムで計算するベクトル値
MVDATA:1MVmodeのときのDMV情報を表すシンタックス要素(可変長で、0〜1個/1MB)
BLKMVDATA:4MVmodeのときのDMV情報を表すシンタックス要素(可変長で、0〜4個/1MB)
HYBRIDPRED:ハイブリッド予測に使用されるシンタックス要素(1ビットで、0〜4個/1MB)
ビットプレーン:各MBの1ビット情報を1ピクチャ分まとめて符号化したデータ構造で、ビットプレーン中に下記のMVDATABITが含まれている。
MVDATABIT:1MV/4MVmodeを指定するシンタックス要素(1ビットで、1個/1MBまたはビットプレーン)
NUMREF(Number of Reference Pictures):インタレースPフィールドヘッダにのみ存在する1ビットシンタックス要素である。NUMREF=0ならば、カレントインタレースPフィールドピクチャが1フィールドを参照する。NUMREF=1ならば、カレントインタレースPフィールドピクチャがディスプレイ順序において時間的に最も近いIまたはPフィールドピクチャを参照する。NUMREFは、Pフィールドピクチャの復号に使用される。
Predictor flag:Interlaced fieldで且つNUMREF=1のとき1ビット存在するシンタックス要素
ル予測を説明するもので、カレントMB(斜線で示す)と隣接する3個のMBを示している。図3Aは、カレントMBの上のMB(プリディクタA)、カレントMBの右上のMB(プリディクタB)およびカレントMBの左のMB(プリディクタC)を示す。これらのプリディクタのMVの中間値をカレントMBの予測動きベクトル(PMV)とし、カレントMBの差分がPMVと加算され、カレントMBのMVが復号される。
1−MVmodeMBまたは4−MVmodeMBとして復号されるものである。4−MVmodeMBでは、4個の輝度ブロックのそれぞれが動きベクトルを持つ。
してMVが予測される。また、図6Bに示すように、行の最後の場合には、図3Bの場合と同様に、カレントMBの左上のMBがプリディクタBとして使用される。
0または1)と、マクロブロックレイヤの情報(1MV/4MV、Predictor flag=0または1)と、行の端かどうかによって、動きベクトル予測に使用するプリディクタのパターンが相違する。
Pピクチャでは行われない。言うまでもないが、MVのないI/BIピクチャでは行われない。ハイブリッド予測が行われる全てのプロファイルのProgressivePピクチャと、Advanced ProfileのInterlaced fieldPピクチャでは、1MVmodeのとき、HYBRIDP
REDシンタックス要素は、1MB当たりで1つ存在し、Mixed MVmodeのときHYBRIDPREDシンタックス要素は、1MB当たりで4個存在する。
カレントブロックの予測動きベクトルを生成するために参照される複数のプリディクタがピクチャレイヤの情報(Progressive /Interlaced、NUMREF=0または1)と、マクロブロックレイヤの情報(1MV/4MV、Predictor flag=0または1)とによって規定され、
複数のプリディクタの動きベクトルの中央値を予測動きベクトルとして選択する第1の予測方法によって予測動きベクトルが生成され、第1の予測方法によって生成された予測動きベクトルの値と所定のプリディクタの動きベクトルの値との差分の絶対値が予め設定されたしきい値より大きい場合には、第1の予測方法に代えて、複数のプリディクタの動きベクトルの中で所定のプリディクタの動きベクトルを予測動きベクトルとして選択すると共に、HYBRIDPREDシンタックスがストリーム中の所定位置に挿入される第2の予測方法によって予測動きベクトルが生成され、ストリームから動きベクトルを復号化する動きベクトル復号化方法において、
エントロピー符号化の復号を行うエントロピー復号化ステップと、
所定位置の直前までの復号化されたピクチャレイヤの情報およびマクロブロックレイヤの情報と、所定位置の未確定データとをエントロピー復号化ステップから受け取り、
ピクチャレイヤの情報およびマクロブロックレイヤの情報によって規定される複数のプリディクタを使用して第1の予測方法によって生成された予測動きベクトルの値と所定のプリディクタの動きベクトルの値との差分の絶対値が予め設定されたしきい値より大きいか否かを判定し、
判定結果に対応して第1および第2の予測方法の一方によって予測動きベクトルを生成し、予測動きベクトルと差分とを加算して動きベクトルを復号化と共に、判定結果に対応するフラグUSEDHYBRIDをエントロピー復号化ステップに対して出力する動きベクトル復号化ステップとを有し、
エントロピー復号化ステップは、フラグUSEDHYBRIDが未確定データがHYBRIDPREDシンタックスでないことを示す場合には、未確定データを次のシンタクスの復号開始位置とし、フラグUSEDHYBRIDが未確定データがHYBRIDPREDシンタックスであることを示す場合には、未確定データの次のシンタクスを復号開始位置とする動きベクトル復号化方法である。
カレントブロックの予測動きベクトルを生成するために参照される複数のプリディクタがピクチャレイヤの情報(Progressive /Interlaced、NUMREF=0または1)と、マクロブロックレイヤの情報(1MV/4MV、Predictor flag=0または1)とによって規定され、
複数のプリディクタの動きベクトルの中央値を予測動きベクトルとして選択する第1の予測方法によって予測動きベクトルが生成され、第1の予測方法によって生成された予測動きベクトルの値と所定のプリディクタの動きベクトルの値との差分の絶対値が予め設定されたしきい値より大きい場合には、第1の予測方法に代えて、複数のプリディクタの動きベクトルの中で所定のプリディクタの動きベクトルを予測動きベクトルとして選択すると共に、HYBRIDPREDシンタックスがストリーム中の所定位置に挿入される第2の予測方法によって予測動きベクトルが生成され、ストリームから動きベクトルを復号化する動きベクトル復号化装置において、
エントロピー符号化の復号を行うエントロピー復号化部と、
所定位置の直前までの復号化されたピクチャレイヤの情報およびマクロブロックレイヤの情報と、所定位置の未確定データとをエントロピー復号化部から受け取り、
ピクチャレイヤの情報およびマクロブロックレイヤの情報によって規定される複数のプリディクタを使用して第1の予測方法によって生成された予測動きベクトルの値と所定のプリディクタの動きベクトルの値との差分の絶対値が予め設定されたしきい値より大きいか否かを判定し、
判定結果に対応して第1および第2の予測方法の一方によって予測動きベクトルを生成し、予測動きベクトルと差分とを加算して動きベクトルを復号化と共に、判定結果に対応するフラグUSEDHYBRIDをエントロピー復号化部に対して出力する動きベクトル復号化部とを有し、
エントロピー復号化部は、フラグUSEDHYBRIDが未確定データがHYBRIDPREDシンタックスでないことを示す場合には、未確定データを次のシンタクスの復号開始位置とし、フラグUSEDHYBRIDが未確定データがHYBRIDPREDシンタックスであることを示す場合には、未確定データの次のシンタクスを復号開始位置とする動きベクトル復号化装置である。
PMV B=(22,−11)
PMV C=(−11,11)
PMV B=(11,22)
PMV C=(−11,11)
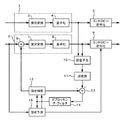
2 インター予測符号化部
21 イントラ予測復号化部
22 インター予測復号化部
32,50 動きベクトル復号化部
41,51 VLD
42,52 MVP
42a,52a PMV算出部
42b,52b MV算出部
43,53 MV記憶領域
Claims (5)
- カレントブロックの動きベクトルが上記カレントブロックに隣接する複数のプリディクタの動きベクトルから予測され、予測動きベクトルと上記カレントブロックの動きベクトルとの差分がエントロピー符号化され、上記エントロピー符号化データを含む入力ストリームから上記動きベクトルが復号化される動きベクトル復号化方法であって、
上記カレントブロックの予測動きベクトルを生成するために参照される複数の上記プリディクタがピクチャレイヤの情報(Progressive /Interlaced、NUMREF=0または1)と、マクロブロックレイヤの情報(1MV/4MV、Predictor flag=0または1)とによって規定され、
複数の上記プリディクタの動きベクトルの中央値を上記予測動きベクトルとして選択する第1の予測方法によって上記予測動きベクトルが生成され、上記第1の予測方法によって生成された予測動きベクトルの値と所定の上記プリディクタの動きベクトルの値との差分の絶対値が予め設定されたしきい値より大きい場合には、上記第1の予測方法に代えて、複数の上記プリディクタの動きベクトルの中で所定の上記プリディクタの動きベクトルを上記予測動きベクトルとして選択すると共に、HYBRIDPREDシンタックスがストリーム中の所定位置に挿入される第2の予測方法によって上記予測動きベクトルが生成され、上記ストリームから動きベクトルを復号化する動きベクトル復号化方法において、
上記エントロピー符号化の復号を行うエントロピー復号化ステップと、
上記所定位置の直前までの復号化された上記ピクチャレイヤの情報およびマクロブロックレイヤの情報と、上記所定位置の未確定データとを上記エントロピー復号化ステップから受け取り、
上記ピクチャレイヤの情報およびマクロブロックレイヤの情報によって規定される複数の上記プリディクタを使用して上記第1の予測方法によって生成された予測動きベクトルの値と所定の上記プリディクタの動きベクトルの値との差分の絶対値が予め設定されたしきい値より大きいか否かを判定し、
判定結果に対応して上記第1および第2の予測方法の一方によって上記予測動きベクトルを生成し、上記予測動きベクトルと上記差分とを加算して動きベクトルを復号化と共に、上記判定結果に対応するフラグUSEDHYBRIDを上記エントロピー復号化ステップに対して出力する動きベクトル復号化ステップとを有し、
上記エントロピー復号化ステップは、上記フラグUSEDHYBRIDが上記未確定データが上記HYBRIDPREDシンタックスでないことを示す場合には、上記未確定データを次のシンタクスの復号開始位置とし、上記フラグUSEDHYBRIDが上記未確定データが上記HYBRIDPREDシンタックスであることを示す場合には、上記未確定データの次のシンタクスを復号開始位置とする動きベクトル復号化方法。 - 上記カレントブロックおよび上記プリディクタは、マクロブロックまたはマクロブロックを分割したブロックである請求項1記載の動きベクトル復号化方法。
- 上記HYBRIDPREDシンタックスが1ビットである請求項1記載の動きベクトル復号化方法。
- カレントブロックの動きベクトルが上記カレントブロックに隣接する複数のプリディクタの動きベクトルから予測され、予測動きベクトルと上記カレントブロックの動きベクトルとの差分がエントロピー符号化され、上記エントロピー符号化データを含む入力ストリームから上記動きベクトルが復号化される動きベクトル復号化装置であって、
上記カレントブロックの予測動きベクトルを生成するために参照される複数の上記プリディクタがピクチャレイヤの情報(Progressive /Interlaced、NUMREF=0または1)と、マクロブロックレイヤの情報(1MV/4MV、Predictor flag=0または1)とによって規定され、
複数の上記プリディクタの動きベクトルの中央値を上記予測動きベクトルとして選択する第1の予測方法によって上記予測動きベクトルが生成され、上記第1の予測方法によって生成された予測動きベクトルの値と所定の上記プリディクタの動きベクトルの値との差分の絶対値が予め設定されたしきい値より大きい場合には、上記第1の予測方法に代えて、複数の上記プリディクタの動きベクトルの中で所定の上記プリディクタの動きベクトルを上記予測動きベクトルとして選択すると共に、HYBRIDPREDシンタックスがストリーム中の所定位置に挿入される第2の予測方法によって上記予測動きベクトルが生成され、上記ストリームから動きベクトルを復号化する動きベクトル復号化装置において、
上記エントロピー符号化の復号を行うエントロピー復号化部と、
上記所定位置の直前までの復号化された上記ピクチャレイヤの情報およびマクロブロックレイヤの情報と、上記所定位置の未確定データとを上記エントロピー復号化部から受け取り、
上記ピクチャレイヤの情報およびマクロブロックレイヤの情報によって規定される複数の上記プリディクタを使用して上記第1の予測方法によって生成された予測動きベクトルの値と所定の上記プリディクタの動きベクトルの値との差分の絶対値が予め設定されたしきい値より大きいか否かを判定し、
判定結果に対応して上記第1および第2の予測方法の一方によって上記予測動きベクトルを生成し、上記予測動きベクトルと上記差分とを加算して動きベクトルを復号化と共に、上記判定結果に対応するフラグUSEDHYBRIDを上記エントロピー復号化部に対して出力する動きベクトル復号化部とを有し、
上記エントロピー復号化部は、上記フラグUSEDHYBRIDが上記未確定データが上記HYBRIDPREDシンタックスでないことを示す場合には、上記未確定データを次のシンタクスの復号開始位置とし、上記フラグUSEDHYBRIDが上記未確定データが上記HYBRIDPREDシンタックスであることを示す場合には、上記未確定データの次のシンタクスを復号開始位置とする動きベクトル復号化装置。 - 上記HYBRIDPREDシンタックスが1ビットである請求項4記載の動きベクトル復号化装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006156904A JP4760552B2 (ja) | 2006-06-06 | 2006-06-06 | 動きベクトル復号化方法および復号化装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006156904A JP4760552B2 (ja) | 2006-06-06 | 2006-06-06 | 動きベクトル復号化方法および復号化装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007329528A JP2007329528A (ja) | 2007-12-20 |
| JP4760552B2 true JP4760552B2 (ja) | 2011-08-31 |
Family
ID=38929735
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006156904A Expired - Fee Related JP4760552B2 (ja) | 2006-06-06 | 2006-06-06 | 動きベクトル復号化方法および復号化装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4760552B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8731062B2 (en) * | 2008-02-05 | 2014-05-20 | Ntt Docomo, Inc. | Noise and/or flicker reduction in video sequences using spatial and temporal processing |
| JP4868539B2 (ja) * | 2008-03-03 | 2012-02-01 | Kddi株式会社 | 動画像符号化装置および復号装置 |
| JP2010233135A (ja) * | 2009-03-30 | 2010-10-14 | Kddi R & D Laboratories Inc | 動画像符号化装置および動画像復号装置 |
| KR101452859B1 (ko) | 2009-08-13 | 2014-10-23 | 삼성전자주식회사 | 움직임 벡터를 부호화 및 복호화하는 방법 및 장치 |
| JP5298060B2 (ja) * | 2010-04-02 | 2013-09-25 | 日本放送協会 | 予測ベクトル生成器、符号化装置、復号装置、及びプログラム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7567617B2 (en) * | 2003-09-07 | 2009-07-28 | Microsoft Corporation | Predicting motion vectors for fields of forward-predicted interlaced video frames |
| US7599438B2 (en) * | 2003-09-07 | 2009-10-06 | Microsoft Corporation | Motion vector block pattern coding and decoding |
-
2006
- 2006-06-06 JP JP2006156904A patent/JP4760552B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007329528A (ja) | 2007-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12167044B2 (en) | Image processing device and image processing method | |
| KR102167350B1 (ko) | 동화상 부호화 장치 및 그 동작 방법 | |
| JP4324844B2 (ja) | 画像復号化装置及び画像復号化方法 | |
| JP2004140473A (ja) | 画像情報符号化装置、復号化装置並びに画像情報符号化方法、復号化方法 | |
| KR101390620B1 (ko) | 비디오 인코딩을 위한 전력 효율적인 움직임 추정 기법 | |
| WO2003043344A2 (en) | Reduced-complexity video decoding using larger pixel-grid motion compensation | |
| JP3092281B2 (ja) | 画像信号の高能率符号化及び復号化装置 | |
| TW201215156A (en) | Image decoding device, image encoding device, and method and program thereof | |
| CN102939757A (zh) | 图像处理装置和方法 | |
| JP4360093B2 (ja) | 画像処理装置および符号化装置とそれらの方法 | |
| JP5560009B2 (ja) | 動画像符号化装置 | |
| JP4760552B2 (ja) | 動きベクトル復号化方法および復号化装置 | |
| EP2109319A1 (en) | Moving image encoding-decoding system with macroblock-level adaptive frame/field processing | |
| US20070133689A1 (en) | Low-cost motion estimation apparatus and method thereof | |
| JP2008244993A (ja) | トランスコーディングのための装置および方法 | |
| JP3257052B2 (ja) | 画像信号の高能率符号化装置及びその方法 | |
| JP4760551B2 (ja) | 動きベクトル復号化方法および復号化装置 | |
| JP4802928B2 (ja) | 画像データ処理装置 | |
| JP2004040494A (ja) | 画像情報変換方法及び画像情報変換装置 | |
| JPH11252561A (ja) | 動画像復号化方法 | |
| JP2005323393A (ja) | 動画像符号化方法および装置 | |
| JP2000350214A (ja) | 動き補償予測符号化方法及びその装置 | |
| KR20090108567A (ko) | 동화상 처리 시스템, 부호화 장치, 부호화 방법, 복호화 장치, 복호화 방법, 및 기억 매체 | |
| JPH11262011A (ja) | 動画像復号化装置 | |
| JP2001177840A (ja) | 画像信号の高能率復号化装置及びその方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090430 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100928 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101005 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101206 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110523 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140617 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140617 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |