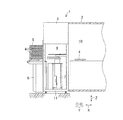
図1は、本発明の第1実施形態である基板搬送方法を実施するウェハ移載装置23を備える半導体処理設備20の一部を示す平面図である。図2は、半導体処理設備20の一部を切断して示す断面図である。図1および図2には、ロボット27の他の可動状態の形状の一例を2点鎖線で示す。半導体処理設備20は、処理対象基板となる半導体ウェハ24に対して、予め定める処理を施す。たとえば半導体ウェハ24に施される処理として、熱処理、不純物導入処理、薄膜形成処理、リソグラフィー処理、洗浄処理または平坦化処理などの様々なプロセス処理が想定される。また半導体処理設備20は、上述した基板処理以外の基板処理が行われてもよい。
半導体処理設備20は、クリーン度の高い雰囲気気体で満たされた処理空間30内で、上述した基板処理を行う。ウェハ24は、フープ25(FOUP、Front Opening
Unified Pod、略称フープ)と称される基板容器に複数収容された状態で、半導体処理設備20に搬送される。フープ25は、局所クリーン化技術に関し、クリーン環境におけるミニエンバイロメント用基板容器である。
フープ25は、ウェハ24が収容される容器本体となるフープ本体60と、フープ本体60に対して着脱可能に形成される容器側ドアとなるフープ側ドア61とを含んで構成される。フープ本体60は、一方に開放する略箱状に形成され、ウェハ収容空間としてフープ内空間34が形成される。フープ側ドア61がフープ本体60に装着されることによって、フープ内空間34が、外方空間33に対して密閉されて、外方空間33から塵埃粒子などの汚染物質がフープ内空間34に侵入することを防ぐ。またフープ側ドア61がフープ本体60から取外されることで、フープ内空間34にウェハ24を収容可能となるとともに、フープ内空間34に収容されるウェハ24を取り出し可能となる。フープ25は、複数のウェハ24を上下方向Zに並べた状態で収容する。フープ25に収容される各ウェハ24は、上下方向Zに等間隔に並び、厚み方向一方の面が水平にそれぞれ延びる。
半導体処理設備20は、ウェハ処理装置22と、ウェハ移載装置23とを含んで構成される。半導体処理設備20は、たとえばSEMI(Semiconductor Equipment and
Materials International)規格によって、予め規定される。この場合、たとえばフープ
25およびフープ25を開閉するためのフープオープナ(FOUP Opener)26は、SEM
I規格のE47.1、E15.1、E57、E62、E63、E84などの仕様に従う。ただし、半導体処理設備20の構成がSEMI規格外の構成であっても、本実施の形態に含まれる。
ウェハ処理装置22は、前記処理空間30でウェハ24に上述した予め定める処理を施す。ウェハ処理装置22は、ウェハ24に処理を施す処理装置本体のほか、処理空間30を形成する処理空間形成部、処理空間30でウェハ24を搬送する搬送装置および処理空間30に満たされる雰囲気気体を制御する調整装置を有する。調整装置は、ファンフィルタユニット等によって実現される。
ウェハ移載装置23は、処理前のウェハ24をフープ25から取り出してウェハ処理装置22に供給するとともに、処理後のウェハ24をウェハ処理装置22から取り出して、フープ25に再収容する。ウェハ移載装置23は、フロントエンドモジュール装置(
Equipment Front End Module、略称EFEM)である。ウェハ移載装置23は、半導体処理設備20のうちで、フープ25とウェハ処理装置22との間でのウェハ24の受渡しを担うインターフェース部となる。ウェハ24は、フープ内空間34と、ウェハ処理装置22の処理空間30との間を移動する間に、予め定められる雰囲気気体で満たされるクリーン度の高い準備空間29を通過する。
準備空間29は、コンタミネーションコントロールが行われている閉じられた空間であって、空気中における浮遊微小粒子が限定された清浄度レベル以下に管理され、必要に応じて温度、湿度、圧力などの環境条件についても管理が行われている空間である。本実施の形態では、処理空間30および準備空間29は、ウェハ24の処理に悪影響を与えないようにクリーン度に保たれる。たとえばクリーン度として、ISO(国際標準化機構、
International Organization for Standardization)に規定されるCLASS1が採用される。
ウェハ移載装置23は、前記準備空間29を形成する準備空間形成部28と、準備空間29に配置されてウェハ搬送可能なウェハ搬送ロボット27と、フープ25を開閉する開閉装置であるフープオープナ26と、準備空間29に満たされる雰囲気気体を調整する準備空間調整装置100とを含む。また本実施の形態では、ウェハ移載装置23は、予め定める保持位置に保持されるウェハ24の向きを整えるアライナ56をさらに含む。
準備空間形成部28は、準備空間29を囲み、外方空間33から外気が準備空間29に侵入することを防ぐ。準備空間形成部28には、ウェハ24を搬送するのに必要な各搬送系要素がそれぞれ固定される。本実施の形態では準備空間形成部28に、4つのフープオープナ26a,26b,26c,26dと、1つのウェハ搬送ロボット27と、1つのアライナ56がそれぞれ固定される。
準備空間形成部28は、直方体箱状に形成され、直方体形状の準備空間29を形成するる。準備空間形成部28は、予め定める前後方向Xに間隔をあけて配置される正面壁110と、背面壁111とを有する。正面壁110は、準備空間29よりも前方X1に位置する外方空間33と準備空間29とを仕切る仕切りとなる。また背面壁111は、準備空間29と処理空間30とを仕切る仕切りとなる。したがって準備空間29は、外方空間33よりも後方X2であって、処理空間30よりも前方X1に形成される。
また準備空間形成部28は、左右方向Yに間隔をあけて配置される2つの側壁112,113を有する。また準備空間形成部28は、上下方向Zに間隔をあけて配置される天井壁114と底壁115とを有する。これらの準備空間形成部28の有する壁110〜115は、板状にそれぞれ形成される。
本実施の形態では、前後方向Xおよび左右方向Yは、予め設定される方向である。前後方向Xおよび左右方向Yは、上下方向Zに直交する方向であり、水平にそれぞれ延びて、互いに直交する。前後方向Xのうちの後方X2は、フープ25に収容されるウェハ24が、処理空間30に向かう方向である。また前後方向Xのうちの前方X1は、処理空間30に収容されるウェハ24が、フープ25に向かう方向である。
第1側壁112は、正面壁110と背面壁111との左右方向一端部を連結する。第2側壁部113は、正面壁110と背面壁111との左右方向他端部を連結する。また天井壁114は、正面壁110、背面壁111、第1側壁112および第2側壁113の上端部をそれぞれ連結する。また底壁115は、正面壁110、背面壁111、第1側壁112および第2側壁113の下端部をそれぞれ連結する。
準備空間29は、正面壁110および背面壁111によって前後方向Xに塞がれる。また準備空間29は、第1側壁112および第2側壁113によって左右方向Yに塞がれる。また準備空間29は、天井壁114および底壁115によって、上下方向Zに塞がれる。このようにして準備空間29が規定される。また準備空間形成部28は、上下方向Zに垂直な断面形状が、左右方向Yが長手方向となり、前後方向Xが幅方向となり、四角枠状に形成される。したがって準備空間29は、前後方向Xに比べて左右方向Yが長くなる横長の空間となる。
正面壁110には、厚み方向である前後方向Xに貫通する正面側開口120が形成される。また正面側開口120は、ウェハ24が挿通可能に形成される。ウェハ24は、ウェハ搬送ロボット27によって、正面側開口120を通過して、正面壁110よりも後方X2に移動駆動されることによって、外方空間33から準備空間29に挿入される。またウェハ24は、ウェハ搬送ロボット27によって、正面側開口120を通過して、正面壁110よりも前方X1に移動駆動されることによって、準備空間29から外方空間33に排出される。本実施の形態では、正面側開口120は、4つ設けられ、各正面側開口120は、左右方向Yに並ぶ。
背面壁111には、厚み方向である前後方向Xに貫通する背面側開口121が形成される。背面側側開口121は、ウェハ24が挿通可能に形成される。ウェハ24は、ウェハ搬送ロボット27によって、背面側開口121を通過して、背面壁111よりも後方X2に移動駆動されることによって、準備空間29から処理空間30に排出される。またウェハ24は、ウェハ搬送ロボット27によって、背面側開口121を通過して、背面壁111よりも前方X1に移動駆動されることによって、処理空間30から準備空間29に挿入される。本実施の形態では、背面側開口121は、2つ設けられ、各背面側開口121は、左右方向Yに並ぶ。
各フープオープナ26a〜26dは、正面プレート101と、オープナ側ドア65と、フープ支持部31と、ドア開閉機構109とをそれぞれ含んで構成される。フープオープナ26a〜26dは、左右方向Yに等間隔に並んで配置される。各フープオープナ26a〜26dは、準備空間形成部28の前方X1側に配置される。フープオープナ26a〜26dは、基板容器であるフープを設置する基板容器設置台を兼用する。したがって、フープオープナ26a〜26dは、少なくともフープを支持する基板容器設置台の役割を担う。
正面プレート101は、準備空間形成部28の正面壁110の一部を構成する。各フープオープナ26a〜26dの正面プレート101は、上述した正面側開口120をそれぞれ形成する板状または枠状部材であって、正面壁110の残余の部分に固定されることで、正面壁110を構成する。各正面プレート101に形成される正面側開口120は、フープ側ドア61が、前後方向Xに通過可能に形成される。
オープナ側ドア65は、正面側開口120を開閉するためのドアである。フープ支持部31は、準備空間29よりも前方X1の外方空間33に配置されて、フープ25を下方から支持する。フープ25は、フープ支持部31に支持された状態で、フープ支持部31に設定される装着位置に位置決め可能に形成される。以下、第1〜第4フープオープナ26a〜26dに、それぞれ対応して支持されるフープを第1〜第4フープ25a〜25dと称する。また第1〜第4フープ25a〜25dを区別する必要がない場合、単にフープ25と称する。
装着位置にフープ25が位置決めされた位置決め状態では、フープ本体60の開口部60aが、正面プレート101の開口部101aの全周にわたって接する。また位置決め状態では、フープ側ドア61が、正面側開口120を塞ぐオープナ側ドア65に外方空間33から臨む。
ドア開閉機構109は、装着位置にフープ25が位置決めされた状態において、オープナ側ドア65およびフープ側ドア61を開閉する機構である。ドア開閉機構109が、オープナ側ドア65およびフープ側ドア61を直接または間接的に把持して、各開口部60a,101aから後方X2でかつ下方に移動させて、準備空間29内に設定される開放位置に移動させることで、フープ内空間34と準備空間29とを連通させる。またドア開閉機構109が、オープナ側ドア65およびフープ側ドア61を各開口部60a,101aにそれぞれ装着させることで、フープ内空間34と準備空間29との連通を阻止する。
フープ25を位置決めした位置決め状態では、フープ本体60の開口部60aと、正面プレート101の開口部101aとが、互いの周縁部の全周にわたって接する。したがってフープ25を位置決めした状態では、ドア開閉機構109によって、オープナ側ドア65およびフープ側ドア61を各開口部60a,101aから取外したとしても、外気が、フープ内空間34および準備空間29に侵入することが防がれる。
各フープオープナ26a〜26dは、左右方向Yに並んで設けられ、それぞれ個別に動作可能に構成される。図1において、左端に位置する第1のフープオープナ26aは、対応する正面側開口120を開いた状態を示す。また第1のフープオープナ26a以外のフープオープナ26b〜26dは、対応する正面側開口120を閉じた状態を示す。
各フープオープナ26a〜26dは、ドア開閉機構109によって、各ドア61,65を開放位置に移動させるための可動領域108が設定される。フープオープナ26a〜26dの可動領域108は、準備空間29内に設定される領域であり、準備空間29内の正面壁110寄りの領域となる。
ウェハ搬送ロボット27は、本実施の形態では、スカラ(Selective Compliance
Assembly Robot Arm、SCARA)型の水平多関節ロボットによって実現される。ウェハ搬送ロボット27は、準備空間29に配置され、ロボットアーム41と、水平駆動手段42aと、上下駆動手段42bと、基台43と、コントローラ44とを含んで構成される。
ロボットアーム41は、基端部から先端部に向かう方向に順次連結される複数のリンク体41a〜41cを備えるリンク構造を有する。ロボットアーム41の先端部には、ロボットハンド40が形成される。ロボットハンド40は、ウェハ24を把持可能な把持構造を有する。本明細書においてウェハ24の把持は、ロボットハンド40によってウェハ24を搬送可能な状態とすることを意味し、ロボットハンド40によって、ウェハ24を乗載、吸着または挟持する状態であってもよい。
水平駆動手段42aは、ロボットアーム41の各リンク体41a〜41cを対応する関節軸線A0〜A2まわりにそれぞれ個別に角変位駆動する。ロボットアーム41は、水平駆動手段によって、各リンク体41a〜41cが相互に角変位駆動されることで、ロボットハンド40を、可動範囲内で、水平面上の任意の位置に変位駆動する。水平駆動手段42aは、コントローラ44から与えられる信号に従って角変位するモータと、モータの動力をリンク体に伝達する動力伝達機構とを含む。モータおよび動力伝達機構は、リンク体41a〜41cごとに、それぞれ設けられる。
上下駆動手段42bは、ロボットアーム41を上下方向Zに変位駆動させる。上下駆動手段42bは、固定部分と可動部分とを有し、固定部分に対して可動部分を上下方向に変位駆動する。上下駆動手段42bは、コントローラ44から与えられる信号に従って角変位するモータと、モータの動力を固定部分に対する可動部分の直進力に変換して、可動部分に伝達する動力伝達機構とを含む。上下駆動手段42bの固定部分は基台43に支持される。基台43は、上下駆動手段42bを支持し、準備空間形成部28に固定される。
コントローラ44は、予め定められる動作プログラムまたはユーザから入力される移動指令に従って、水平駆動手段42aおよび上下駆動手段42bを制御し、ロボットハンド40を予め定める位置に移動させる。コントローラ44は、予め定めるプログラムが記憶される記憶回路と、記憶回路に記憶される演算プログラムを演算する演算回路と、演算回路の演算結果を示す信号を、水平駆動手段42aおよび上下駆動手段42bに与える出力手段とを含む。たとえば記憶回路は、RAM(Random Access Memory)およびROM(
Read Only memory)などによって実現され、演算回路は、CPU(Central Processing
Unit)によって実現される。
ロボットアーム41は、ロボットアーム41の基端部が、上下駆動手段42bの可動部分に固定されることで、コントローラ44は、可動範囲内で、ロボットハンド40を、前後方向X、左右方向Yおよび上下方向Zの任意位置に変位駆動させることができる。コントローラ44によって、水平駆動手段42aおよび上下駆動手段42bを制御することによって、ロボットハンド40に把持させたウェハ24を移動させることができる。これによってウェハ24を、予め定める経路に従って移動させて、フープ25とウェハ処理装置22との間にわたって、移載することができる。
ロボットハンド40は、フープオープナ26a〜26dがフープ側ドア61を開いた状態で、正面側開口120を通過してフープ内空間34に侵入して、フープ25に収容されるウェハ24を把持する。次に、ロボットハンド40は、ウェハ24を把持した状態で、準備空間29を経由して、背面側開口121を通過してウェハ処理装置22の処理空間30に侵入して、把持したウェハ24を、予め設定されるウェハ配置位置107に移載する。またロボットハンド40は、背面側開口121を通過して処理空間30に侵入してウェハ配置位置107に把持されるウェハ24を把持する。次に、ロボットハンド40は、ウェハ24を把持した状態で、準備空間29を経由して、正面側開口120を通過してフープ内空間34に侵入して、把持したウェハ24を、フープ25の収容位置に移載する。
本実施の形態では、4つのフープオープナ26a〜26dがそれぞれ設けられるので、ロボットハンド40は、各オープナ26のそれぞれのフープ支持部31に支持されるフープ25それぞれに対して、ウェハ24の出し入れ可能に設定される。またロボットハンド40は、フープ25から取り出したウェハ24を、アライナ56に設定される保持位置に配置可能であるとともに、アライナ56の保持位置から取り出したウェハ24を、ウェハ処理装置22に配置可能である。
アライナ56は、準備空間29に配置され、複数のフープオープナ26a〜26dのうち、左右方向他方の端位置に位置する第4フープオープナ26dよりも、左右方向他方に配置される。またアライナ56は、ウェハ24を支持する保持部を有し、保持部に保持されたウェハ24を回転させて、ウェハ24に形成されるノッチまたはオリフラが予め定める方向に向くように位置合わせする。位置合わせされたウェハ24をロボットハンド40が把持することで、ウェハ24の向きを整えて、ウェハ処理装置22に配置することができる。これによってウェハ処理装置22は、ウェハ24の向きが揃えられた状態で、予め定める処理を行うことができる。
アライナ56に保持されるウェハ25の中心位置は、準備空間29の前後方向Xの略中間位置に設定される。またアライナ56は、ロボットハンド40が各フープオープナ26へ到達することを阻害しない位置に配置される。本実施の形態では、アライナ56は、左右方向他方の端位置に位置する第4フープオープナ26dよりもさらに左右方向他方に配置される。
上述したようにウェハ搬送ロボット27は、準備空間29に配置され、主に準備空間29でロボットハンド40を移動させる。またウェハ搬送ロボット27は、ロボットハンド40を正面側開口120に通過させて、フープ内空間34のウェハ24を取り出し可能かつ、フープ内空間34へウェハ24を取り入れ可能に構成される。またウェハ搬送ロボット27は、ロボットハンド40を背面側開口121に通過させて、処理空間30のウェハ配置位置107からウェハ24を取り出し可能かつ、処理空間30のウェハ配置位置107にウェハ24を取り入れ可能に構成される。またウェハ搬送ロボット27は、各フープオープナ26a〜26dにそれぞれ設定される4つの正面壁開口120を通過可能に構成される。
したがってウェハ搬送ロボット27は、準備空間29の前後方向寸法B以上、ロボットハンド40を前後方向Xに搬送可能に構成される。またウェハ搬送ロボット27は、各フープオープナ26a〜26dに支持されるフープ25にアクセス可能となるように、左右方向Yにロボットハンド40を移動可能に構成される。さらに本実施の形態では、ウェハ搬送ロボット27は、アライナ56にアクセス可能となるように、ロボットハンド40を左右方向Yに移動可能に構成される。
基台43は、準備空間形成部28に固定され、予め定める旋回軸線A0が設定される。旋回軸線A0は、本実施の形態では、鉛直方向に延び、準備空間29のうちで、背面壁111寄りに位置する。また旋回軸線A0は、左右方向一端位置のフープオープナ26aと、左右方向他端位置のフープオープナ26dとの左右方向Yの中央位置に位置する。
ロボットアーム41は、複数のリンク体41a〜41cが互いに連結されて構成されるリンク構造に構成される。ロボットアーム41は、複数のリンク体41a〜41cが順番に配列される配列方向一端部に基端部が設定され、配列方向他端部に先端部が設定される。ロボットアーム41の基端部は、上下駆動手段42bの可動部分に固定され、上下駆動手段42bを介して基台43に連結される。またロボットアーム41の先端部は、ロボットハンド40が形成される。ロボットアーム41は、基端部が、旋回軸線A0まわりに角変位可能に構成される。
具体的にはロボットアーム41は、第1〜第3リンク体41a,41b,41cを有する。各リンク体41a〜41cは、長手方向に縦長となる縦長形状にそれぞれ形成される。第1リンク体41aは、長手方向一端部45aが、上下駆動手段42bの可動部分に連結される。また第1リンク体41aは、上下駆動手段42bの可動部分に対して、旋回軸線A0まわりに角変位可能に構成される。また第1リンク体41aは、長手方向他端部46aに、旋回軸線A0に平行な第1関節軸線A1が設定される。したがって第1関節軸線A1は、第1リンク体41aの移動にともなって移動する。第1リンク体41aの長手方向は、旋回軸線A0と第1関節軸線A1とを結ぶ方向となる。
第2リンク体41bは、長手方向一端部45bが、第1リンク体41aの長手方向他端部46aに連結される。また第2リンク体41bは、第1リンク体41aに対して、第1関節軸線A1まわりに角変位可能に構成される。また第2リンク体41bは、長手方向他端部46bに、旋回軸線A0に平行な第2関節軸線A2が設定される。したがって第2関節軸線A2は、第2リンク体41bの移動にともなって移動する。第2リンク体41bの長手方向は、第1関節軸線A1と第2関節軸線A2とを結ぶ方向となる。
第3リンク体41cは、長手方向一端部45cが、第2リンク体41bの長手方向他端部46bに連結される。また第3リンク体41cは、第2リンク体41bに対して、第2関節軸線A2まわりに角変位可能に構成される。また第3リンク体41cは、長手方向他端部46cに、ロボットハンド40が形成される。したがってロボットハンド40は、第3リンク体41cの移動にともなって移動する。第3リンク体41cの長手方向は、第2関節軸線A2と、ロボットハンド40が把持するウェハ24の中心位置A3とを結ぶ方向となる。
このようにロボットアーム41は、3つのリンク体41a〜41cからなるリンク構造を有する。上述した水平駆動手段42aは、第1〜第3モータを有する。第1モータは、第1リンク体41aを旋回軸線A0まわりに回転駆動するためのモータである。第2モータは、第2リンク体41bを第1関節軸線A1まわりに回転駆動するためのモータである。第3駆動源は、第3リンク体41cを第2関節軸線A2まわりに回転駆動するためのモータである。したがって水平駆動手段42aは、第1〜第3リンク体41a〜41cをそれぞれ独立して個別に、対応する角変位軸線A0〜A2まわりに角変位駆動させることができる。
図2に示すように、第2リンク体41bは、第1リンク体41aよりも上方に配置される。これによって第2リンク体41bは、第1リンク体41aに対して、上下方向Zに重なる位置に移動可能であり、第1リンク体41aと第2リンク体41bとが干渉することが防がれる。同様に第3リンク体41cは、第2リンク体41bよりも上方に配置される。これによって第3リンク体41cは、第2リンク体41bに対して、上下方向Zに重なる位置に移動可能であり、第1リンク体41a〜第3リンク体41cが互いに干渉することが防がれる。
図3は、各リンク体41a〜41cの長さを説明するためにウェハ移載装置23を簡略化して示す平面図である。ロボットアーム41は、各リンク体41a〜41cが対応する角変位軸線A0〜A2まわりに角変位することで、最小変形状態に変形可能である。最小変形状態とは、旋回軸線A0から、旋回軸線A0を中心にして水平方向に延びる半径方向に最も離れるアーム部分までの距離が最小となる変形状態である。より具体的には、最小変形状態とは、ロボットアーム41がウェハ24を把持した状態で、旋回軸線A0から、半径方向に最も離れるアーム部分またはウェハ24の一部分までの距離が最小となる変形状態である。
以下、最小変形状態において、旋回軸線A0から旋回軸線A0に対して半径方向に最も離れるアーム部分またはウェハ部分までの距離を、「ロボットの最小回転半径R」と称する。また正面壁110と背面壁111との間の前後方向Xの寸法を「準備空間の前後方向寸法B」と称する。
本実施形態では、ロボットの最小回転半径Rが、準備空間29の前後方向寸法Bの1/2を超える。また最小回転半径Rが、準備空間29の前後方向寸法Bから、背面壁111から旋回軸線A0までの前後方向距離L0を減算した減算値(B−L0)以下に設定(B/2<R≦B−L0)される。したがって最小変形状態で変形したとしても、ロボットアーム41は、背面壁111に干渉することが防がれる許容角変位範囲で、旋回軸線A0まわりに角変位するように角変位量が制限される。本実施の形態では、許容角変位範囲は、旋回軸線A0まわりに360°未満、たとえば約180°に設定される。これによって最小変形状態に維持されるウェハ搬送ロボット27は、許容角変位範囲で動作する限り、正面壁110および背面壁111に干渉することを防ぐことができる。
背面壁111から旋回軸線A0までの前後方向距離L0は、少なくとも、準備空間29の前後方向寸法Bの1/2未満に設定される(L0<B/2)。本実施の形態では、背面壁111から旋回軸線A0までの前後方向距離L0は、準備空間29の前後方向寸法Bの1/5未満に設定される(L0<B/5)。また背面壁111から旋回軸線A0までの前後方向距離L0は、前記第1リンク体41aにおける旋回軸線A0よりも第1関節軸線A1側と反対側の全領域において、旋回軸線A0まわりの周面の半径方向寸法T2よりも、予め定める隙間寸法Qぶん、大きい寸法に設定される(L0=T2+Q)。予め定める隙間寸法Qは、ウェハ搬送ロボット27の干渉を防ぐのに十分な隙間寸法であって、本実施の形態では、30mmに設定される。
さらに具体的には、本実施の形態では、ウェハ搬送ロボット27の最小回転半径Rは、準備空間29の前後方向寸法Bから、準備空間形成部28の背面壁から旋回軸線までの前後方向距離L0と、フープオープナ26に設定される正面壁110から背面壁側の前後方向Xのロボット侵入禁止領域寸法Eとを減算した許容寸法(B−L0−E)の1/2を超え、前記許容寸法(B−L0−E)以下に設定((B−L0−E)/2<R≦B−L0−E)される。これによって、最小変形状態に維持されるウェハ搬送ロボット27が、フープオープナ26に干渉することについても防ぐことができる。
また旋回軸線A0から、旋回軸線A0に対して第1関節軸線A1に向かう半径方向に最も遠ざかる第1リンク体41aの端部までの距離を、第1リンク距離L1と称する。第1リンク距離L1は、前記許容寸法(B−L0−E)の1/2を超え、前記許容寸法(B−L0−E)以下に設定((B−L0−E)/2<L1≦B−L0−E)される。前記第1リンク体41aは、第1関節軸線A1よりも旋回軸線A0側と反対側の全領域において、第1関節軸線A1まわりの周面の半径方向寸法T1が、前記許容寸法(B−L0−E)から、旋回軸線A0から第1関節軸線A1までの第1軸間距離L11を減算した値(B−L0−E−L11)以下に形成される(T1≦B−L0−E−L11)。
また前記第1リンク体41aは、旋回軸線A0よりも第1関節軸線A1側と反対側の全領域において、旋回軸線A0まわりの周面の半径方向寸法T2が、背面壁111から旋回軸線A0までの前後方向距離L0未満に形成される(T2<L0)。これによって第1リンク体41aの長手方向と前後方向Xとが一致した状態から、第1リンク体41aが、旋回軸線A0まわりに周方向一方に90°角変位した場合であっても、旋回軸線A0まわりに周方向他方に90°角変位した場合であっても、第1リンク体41aが、背面壁111と干渉することが防がれる。
また本実施の形態では、旋回軸線A0から第1関節軸線A1までの第1軸間距離L11と、第1関節軸線A1から第2関節軸線A2までの第2軸間距離L12とが同一に設定される。本明細書において、同一とは、実質的に同一な状態を含み、同一および略同一な状態を含む。また第2関節軸線A2から、第2関節軸線A2に対して第1関節軸線A1に向かう方向に最も遠ざかる第2リンク体41bの端部までの距離を、第2リンク距離L2と称する。第2リンク距離L2は、前記許容寸法(B−L0−E)の1/2を超え、前記許容寸法(B−L0−E)以下に設定((B−L0−E)/2<L2≦B−L0−E)される。
また第2リンク体41bは、第1関節軸線A1よりも第2関節軸線A2側と反対側の全領域において、第1関節軸線A1まわりの周面の半径方向寸法T3が、前記許容寸法(B−L0−E)から、第1軸間距離L11を減算した値(B−L0−E−L11)以下に形成される(T3≦B−L0−E−L11)。また第2リンク体41aは、第2関節軸線A2よりも第1関節軸線A1側と反対側の全領域において、第2関節軸線A2まわりの周面の半径方向寸法T4が、背面壁111から旋回軸線A0までの前後方向距離L0未満に形成される(T4<L0)。
またウェハ24をロボットハンド40が把持した状態で、第2関節軸線A2から、第2関節軸線A2に対して半径方向に最も遠ざかる第3リンク体41cの端部またはウェハ部分までの距離を第3リンク距離L3と称する。第3リンク距離L3は、前記許容寸法(B−L0−E)の1/2を超え、前記許容寸法(B−L0−E)以下に設定((B−L0−E)/2<L2≦B−L0−E)される。また第3リンク体41cは、第2関節軸線A2よりもウェハ把持中心位置A3側と反対側の全領域において、第2関節軸線A2まわりの周面の半径方向寸法T5が、背面壁111から旋回軸線A0までの前後方向距離L0未満に形成される(T5<L0)。
本実施の形態では、第1リンク距離L1および第2リンク距離L2が、許容寸法(B−L0−E)と同一距離に設定される。また第1軸間距離L11と、第2軸間距離L12とは、同一距離に設定され、各フープオープナ26a〜26dに支持されるフープ25のウェハ24を取り出し可能な距離に設定される。また本実施の形態では、第3リンク距離L3もまた、許容寸法(B−L0−E)と同一に設定される。図3に示すように、第1リンク体41aと第2リンク体41bとを一直線に延ばした状態で、ロボットハンド40がウェハ24を保持可能に設定される。
第1フープオープナ26aに支持される第1フープ25aに収容されるウェハ24を把持する位置に、第3リンク体41cを配置した場合、第2関節軸線A2から旋回軸線A0までの前後方向Xの距離をS1とする。また第2関節軸線A2から旋回軸線A0までの左右方向距離をS2とする。また第1軸間距離L11と第2軸間距離L12とを合わせた距離を、(L11+L12)とする。
この場合、本実施の形態では、各軸間距離L11,L12は、(L11+L12)=(S12+S22)0.5の関係を満たすように設定する。各軸間距離L11,L12が等しく設定されるので、各軸間距離L11,L12が、((S12+S22)/4)0.5となるように設定される。これによって図3に示すように、第1リンク体41aの長手方向と第2リンク体41bの長手方向とを一直線上に配置した状態で、第1フープ25aに収容されるウェハ24に、ロボットハンド40を到達させることができる。旋回軸線A0は、各フープオープナ26a〜26dの中央位置に配置されるので、第4フープ25dに収容されるウェハ24に関しても、第1リンク体41aの長手方向と第2リンク体41bの長手方向とを一直線上に配置した状態で、第2フープ25dに収容されるウェハ24に、ロボットハンド40を到達させることができる。このように第1リンク体41aおよび第2リンク体41bを一直線状に延ばすことで、第1軸間距離L11および第2軸間距離L12を短くすることができる。
また第3リンク体41cの長手方向が、前後方向Xに対して傾斜した状態で、第1フープ25aおよび第4フープ25dに収容されるウェハ24に、ロボットハンド40を到達させてもよい。これによって第1軸間距離L11および第2軸間距離L12をさらに短くすることができる。
第1フープ25a〜25dに収容されるウェハ24のウェハ中心位置A3の左右方向Y間隔をWとする。またロボットハンド40が第1フープ25aに収容されるウェハ24に到達した到達状態における、前後方向Xに対して第3リンク体41cの長手方向が傾斜する角度をθとする。また到達状態における、ウェハ中心位置A3から第2関節軸線A2までの距離をHとする。また到達状態における、第2関節軸線A2から旋回軸線A0までの前後方向距離S1から、第1軸間距離L11を減算した値(S1−L11)をCとする。この場合、第1軸間距離L11は、次式によって表わされる。
(2・L11)2≧(L11+C)2+(1.5・W−H・sinθ)2 …(1)
たとえばC=0、θ=0とし、W=505mmとすると、各軸間距離L11,L12は、437.3mm以上となる。また正面壁110から背面壁111側のフープオープナ26の前後方向Xのロボット侵入禁止領域寸法Eを、100mmとする。背面壁111から旋回軸線A0までの前後方向距離L0を、65mmとする。またロボットの最小回転半径Rから、第1軸間距離L11を減算(R−L11)した距離L10を50mmとする。この場合、準備空間29の前後方向寸法Bは、652.3mm以上となる(B≧L11+E+L0+L10)。言換えると、準備空間29の前後方向寸法Bが、652.3mmであれば、各軸間距離L11,L12を437.3mmとすることで、4つのフープオープナ26a〜26dにそれぞれ支持される第1および第4フープ25a,25dに収容されるウェハ24を取り出すことができる。また第1および第4フープ25a,25dよりも旋回軸線A0に近い第2および第3フープ25b,25cに収容されるウェハ24についても、当然に取り出すことができる。
本実施の形態では、準備空間29の前後方向寸法Bが694mmである。またウェハ搬送ロボット27の最小回転半径Rが、485mmに設定され、第1軸間距離L11および第2軸間距離L12が、425mmに設定される。またロボットハンド40がウェハ24を把持した状態で、第2関節軸線A2からウェハ中心位置A3までの距離Hが320mmに設定される。また第3リンク距離L3は、470mmに設定される。
またたとえばθ=5°とし、H=330mmとし、他の条件を上述した場合と同一とすると、各軸間距離L11,L12は、420.4mm以上となり、準備空間29の前後方向寸法Bは、635.4mm以上となる。またC=10mmとし、θ=5°とし、H=330mmとし、他の条件を上述した場合と同一とすると、各軸間距離L11,L12は、417.5mm以上となり、準備空間29の前後方向寸法Bは、632.5mm以上となる。
このように、ロボットハンド40がウェハ24に到達した到達状態において、第3リンク体41cの長手方向を、前後方向Xに対して傾斜させることで、第1リンク体41aおよび第2リンク体41bを大きくすることなく、各フープ25a〜25dに収容されるウェハ24を取り出すことができる。
以上のように本実施の形態では、旋回軸線A0を背面壁111寄りに配置し、ロボットアーム41の最小回転半径Rが、前記減算値(B−L0)の1/2を超えて、前記減算値(B−L0)以下に設定されることで、最小変形状態のロボットアーム41と、正面壁101との間に隙間を形成することができ、ロボットアーム41と正面壁110とが干渉することを防ぐことができる。したがって旋回軸線A0を含んで前後方向Xに延びる基準線P0に関して、左右方向Y両側にロボットハンド40を配置可能とすることができる。
またロボットアーム41が背面壁111と干渉するであろう干渉動作範囲を除く動作範囲で動作させることで、背面壁111との干渉についても防ぐことができる。これによって準備空間の前後方向寸法Bが小さくても、3つのリンク体41a〜41cを有するリンク構造のロボットアーム41で、複数、たとえば4つのフープオープナ26a〜26dにそれぞれ支持される第1〜第4フープ25a〜25dに収容されるウェハ24を取り出すことができる。
また本実施の形態では、ロボットの最小回転半径Rが、前記許容寸法(B−L0−E)以下に設定されることで、最小変形状態のロボットアーム41が正面壁101に最も近接した状態であっても、ロボットアーム41の一部が各フープオープナ26a〜26dのロボット侵入禁止領域Eに侵入することを防ぐことができる。これによってフープオープナ26a〜26dの可動状態にかかわらず、ロボットアーム41とフープオープナ26a〜26dとが干渉することを防ぐことができる。
また第1〜第3リンク距離L1〜L3が、前記許容寸法(B−L0−E)の1/2を超え、許容寸法(B−L0−E)以下に設定される。これによって、各リンク体41a〜41cの長さを大きくすることができ、準備空間29の前後寸法Bが小さくても、ロボットハンド40を旋回軸線A0から、左右方向Y両側に離反した位置に配置することができ、フープオープナ26の数が増えた場合であっても、単純なリンク構造で、ウェハ24を搬送可能とすることができる。また本実施の形態では、第1〜第3リンク距離L1〜L3が、許容寸法(B−L0−E)と同一に設定される。これによってロボットアーム41と、正面壁110およびフープオープナ26との干渉を防いで、最大限、各リンク体41a〜41cの長さを大きくすることができる。
このようにロボットアーム41の各リンク体41a〜41cのリンク長さを大きくすることで、左右方向Yに関してロボットアーム41の動作範囲を大きくすることができる。これによって第2従来技術に比べて、ロボット27を左右方向Yに走行駆動させる走行手段を不必要として、直動駆動機構をなくすことができる。したがって直動駆動機構で発生する塵埃を防ぐことができ、準備空間29のクリーン度の低下を防ぐことができる。また走行手段を不必要とすることで、ロボット27を小形化および軽量化することができる。
またロボットアーム41のリンク体41a〜41cのリンク長さを大きくすることで、予め定められる位置にロボットハンド40を到達させることができる。またリンク数の増加を防いで、ウェハ搬送ロボット27の構造を簡単化することができる。またウェハ搬送ロボット27の冗長性を減らして、ロボットアーム41の制御および変形状態の教示を簡単化することができ、準備空間形成部28およびフープオープナ26にロボットアーム41が衝突する可能性を減らすことができる。
このように本実施形態では、走行手段の不要に起因して塵埃の飛散を抑えることができるとともに、ウェハ移載装置23内での干渉を防ぐことができ、構造および制御が簡単なウェハ搬送ロボット27を備えるウェハ移載装置23を提供することができる。また準備空間29の前後方向寸法Bを大形化させることなく、フープオープナ26の数を増やすことができる。フープオープナ26の数を増やすことで、フープ25のウェハ移載装置23に対する搬送および着脱動作と、ウェハ移載装置23に保持されるフープ25内のウェハの移載動作とを並列して行うことができ、作業効率を向上することができる。
また準備空間29の前後方向寸法Bを小さくすることができるので、ウェハ移載装置23の設置スペースを小形化することができ、設置スペースに関する制限を緩和して、ウェハ処理設備20の設置しやすくすることができる。また準備空間29の前後方向寸法Bを小さくすることで、準備空間29の前後方向寸法Bが大きい場合に比べて、同一能力の準備空間調整装置100を用いても、準備空間29のクリーン度を向上することができ、歩留まりを向上することができる。
また本実施の形態では、ロボットハンド40がウェハ24に到達した到達状態において、第3リンク体41cの長手方向が、前後方向Xから傾斜するようにすることで、準備空間の前後方向寸法Bが小さく、準備空間形成部28またはフープオープナ26との干渉を防ぐために第1軸間距離L11,L12が短く設定される場合でも、各フープオープナに支持されるフープ25に支持されるウェハ24を把持しやすくすることができる。
また各リンク体41a〜41cの長さを長くすることができるので、各リンク体41a〜41cの長さが短い場合に比べて、対応する旋回軸線A0〜A2まわりに角変位する角速度が同じであっても、ロボットハンドの移動速度を向上することができる。第1リンク体41aおよび第2リンク体41bを動かすことで、慣性イナーシャを小さくすることができる。これによってもロボットハンド40の移動速度を向上することができる。このようにロボットハンド40の移動速度を向上することで、ウェハ24の搬送に費やす搬送時間を短縮することができ、作業効率を向上することができる。
図4は、第1フープ25aに収容されるウェハ24をアライナ56に搬送するまでの搬送動作を簡略化して示す図である。図4(1)〜図4(7)の順で搬送動作が進む。図4に示す搬送動作は、ロボットハンド40の移動経路、移動経由点がコントローラ44に記憶される。コントローラ44が、予め定める動作プログラムを実行して、複数の移動経由点を移動経路に従って通過するように、水平駆動手段42aおよび上下駆動手段42bを制御する。これによってウェハ搬送ロボット27は、第1フープ25aに収容されるウェハ24をアライナ56に搬送することができる。
まず、把持すべきウェハ24の位置までロボットアーム41を上下動させるとともに、ロボットアーム41を変形させて、図4(1)に示すように、第1リンク体41aと第2リンク体41bとを一直線状に延ばした状態で、第1フープ25aに収容されるウェハ24をロボットハンド40によって把持する。次に、図4(2)に示すように、第1リンク体41aおよび第2リンク体41bを対応する角変位軸線A0,A1まわりに角変位させて、第3リンク体41cを後方X2に移動させて、第3リンク体41cおよびウェハ24を準備空間29に収容する。
次に、第1リンク体41aおよび第2リンク体41bを対応する角変位軸線A0,A1まわりに角変位させて、第3リンク体41cを左右方向Yに平行移動させて、第1フープオープナ26aから左右方向Yにはなれた位置に存在するアライナ56に向けて移動させる。このとき、第1軸間距離L11と、第2軸間距離L12とが、等しく設定されるので、図4(3)および図4(4)に示すように、第1リンク体41aを旋回軸線A0まわりに角変位する単位時間あたりの角変位量に対して、2倍の単位時間あたりの角変位量で、第2リンク体41bを第1関節軸線A1まわりに角変位する。これによって第3リンク体41cを第2関節軸線A2まわりに角変位することなく、第3リンク体41cの姿勢を変更せずに、第3リンク体41cを容易に平行移動させることができる。
また第3リンク体41cの姿勢を変更してアライナ56に配置する場合、図4(5)〜図4(7)に示すように、第1〜第3リンク体41a〜41dを対応する角変位軸線A0〜A2まわりに角変位させることで、アライナ56に設定される保持位置に、ウェハ24を配置することができる。またウェハ24を把持してアライナ56に保持させるまでに、アライナ保持可能となるように、上下駆動手段42bによって、ロボットアーム41の上下方向位置を調整する。このようにしてウェハ搬送ロボット27は、第1フープ25aに収容されるウェハ24をアライナ56に搬送することができる。
図5は、アライナ56に支持されるウェハ24を処理空間30に搬送するまでの搬送動作を簡略化して示す図である。図5(1)〜図5(7)の順で搬送動作が進む。図4に示す場合と同様に、コントローラが、予め定められるプログラムに従って、水平駆動手段42aおよび上下駆動手段42bを制御することによって、ウェハ搬送ロボット27は、アライナ56に保持されるウェハ24を処理空間30に搬送することができる。
処理空間30にウェハ24を搬送する場合には、ロボットハンド40を後方X2に向ける必要がある。したがって、図5(1)に示すように、ウェハ24を把持した状態から、第2関節軸線A2を準備空間29内で後方X2寄りに移動させた状態から、第3リンク体41cを第2関節軸線A2まわりに角変位するとともに、第2関節軸線A2を準備空間29内で前方X1寄りに移動させる。図5に示す場合では、第3リンク体41cを約120°角変位させた後、第2関節軸線A2を準備空間29内で前方X1寄りに移動させて、第3リンク体41cをさらに角変位させる。
これによって正面壁110、背面壁111およびフープオープナ26に干渉することなく、準備空間29内で第3リンク体41aの向きを180°変更することができる。したがって図5(2)〜図5(6)に示すように、第3リンク体41cの向きを変更したあとで、図5(7)に示すように、ウェハ24を処理空間30に搬送することができる。またウェハ24を把持して処理空間30に移動させるまでに、処理空間30に移動可能となるように、上下駆動手段42bによって、ロボットアーム41の上下方向位置を調整する。このようにしてウェハ搬送ロボット27は、アライナ56に保持されるウェハ24を処理空間30に搬送することができる。
図6は、処理空間30に配置されるウェハ24を、第1フープ25aに収容するまでの搬送動作を簡略化して示す図である。図6(1)〜図6(7)の順で搬送動作が進む。図4に示す場合と同様に、コントローラが、予め定められるプログラムに従って、水平駆動手段42aおよび上下駆動手段42bを制御することによって、ウェハ搬送ロボット27は、処理空間30に収容されるウェハ24を第1フープ25aに搬送することができる。
まず、把持すべきウェハ24の位置までロボットアーム41を上下動させるとともに、ロボットアーム41を変形させて、図6(1)に示すように、処理空間30のウェハ24を把持する。次に、図6(2)に示すように、第1リンク体41aおよび第2リンク体41bを対応する角変位軸線A0,A1まわりに角変位させて、第3リンク体41cを前方X1に移動させて、第3リンク体41cおよびウェハ24を準備空間29に収容する。次に、図6(3)〜図6(4)に示すように、第3リンク体41cの干渉を防ぐように、第2関節軸線A2の位置を調整しつつ、第3リンク体41cを第2関節軸線A2まわりに回転させて姿勢を変更して、第3リンク体41cの向きを変える。次に、図6(4)〜図6(5)に示すように、第1リンク体41aおよび第2リンク体41bを対応する角変位軸線A0,A1まわりに角変位させて、第3リンク体41cを左右方向Yに平行移動させる。次に図6(6)に示すように、第3リンク体41cのロボットハンド側部分を正面側開口に臨ませるとともに、前後方向Xにほぼ平行な姿勢に維持する。この状態で、前方X1に移動させて、ウェハ収容可能となるように上下方向のロボットハンド40の位置を調整して、図6(7)に示すように、フープ25内空間にウェハ24を収容する。
図7は、本実施の形態のウェハ24の受取りおよび受渡し位置にウェハ24を配置した状態を示す図である。図7(1)〜図7(4)は、第1〜第4フープ25a〜25dに収容されるウェハ24を把持した状態をそれぞれ示す。図7(5)は、アライナ56にウェハ24を配置した状態を示す。図7(6)、図7(7)は、処理空間30に設定される位置にウェハ24を配置した状態を示す。このように本実施形態では、3リンク構造のロボットアームで、4つのフープオープナ26a〜26dに支持されるフープ25のウェハ24を受取り受渡し可能に構成することができる。
また本実施の形態では、ロボットハンド40が設けられる第3リンク体41cは、1つであるとしたが、これに限定せず、第3リンク体41cが複数、たとえば2つ設けられる場合についても、本発明に含まれる。
たとえば第3リンク体41cが複数設けられる場合、第3リンク体41cは、上下方向Zに並んで形成される。各第3リンク体41cは、それぞれ長手方向一端部45cが、第2リンク体41bの長手方向他端部46bに連結される。また各第3リンク体41cは、第2リンク体41bに対して、第2関節軸線A2まわりにそれぞれ個別に角変位可能に構成される。また各第3リンク体41cは、長手方向他端部46cに、ロボットハンド40がそれぞれ形成される。各第3リンク体41cは、上下方向Zに異なる領域に配置されることで、それぞれ個別に第3関節軸線A2まわりに角変位したとしても、互いの第3リンク体41cが干渉することが防がれる。第3リンク体41cが複数設けられることで、一度に搬送可能なウェハ搬送枚数を増やすことができ、作業効率を向上することができる。また第3リンク体41cは、1つまたは2つに限定されず、さらに多数の第3リンク体41cが設けられてもよい。第3リンク体41cは、同一形状に形成されることが好ましい。
図8は、フープオープナ26が3つのウェハ移載装置23を示す平面図である。図9は、フープオープナ26が2つのウェハ移載装置23を示す平面図である。図8および図9には、ウェハ搬送ロボット27の他の可動状態の形状の一例を2点鎖線で示す。図8および図9に示すウェハ搬送ロボット27は、フープオープナ26が4つのウェハ移載装置23と同様のウェハ搬送ロボット27である。したがってウェハ搬送ロボット27は、フープオープナ26の2つおよび3つの場合にも、正面壁110および背面壁111に干渉することなく、ウェハを搬送可能である。したがってフープオープナ26の数に応じてロボットの構成を変える必要がなく、汎用性を向上することができる。
図10は、本発明の第2実施形態の基板搬送方法が実施されるウェハ移載装置23Aを簡略化して示す平面図である。第2実施形態のウェハ移載装置23Aは、第1実施形態のウェハ移載装置23と類似した構成を示し、類似した構成については、説明を省略し、同様の参照符号を付する。第2実施形態のウェハ移載装置23Aは、ウェハ搬送ロボット27のリンク長さが、第1実施形態と異なり、他の構成については、第1実施形態と同様である。
第1実施形態では、第1フープ25aに収容されるウェハ24に、第1リンク体41aと第2リンク体41bとを一直線に延ばした状態で、ロボットハンド40を到達させるとした。しかしながら本発明は、これに限定されない。第2実施形態では、図10に示すように、第1リンク体41aの長手方向と、第2リンク体41bの長手方向とが、予め定められる角度αを成して、第1フープ25aに収容されるウェハ24にロボットハンド40を到達させる。
第2実施形態では、第3リンク体41cの長手方向が、前後方向Xに一致した状態でウェハ24に到達するように、第1リンク体41aと第2リンク体41bとの角度位置が設定される。第2実施形態では、第3リンク体41cの長手方向が、前後方向Xに一致させた状態で、ウェハ24にロボットハンド40を到達させ、第3リンク体41cを後方X2に平行移動して、ウェハ24を準備空間29に侵入させる。これによって、ロボットハンド40に把持されるウェハ24と、正面側開口部101aおよびフープ本体60の開口部60aとの間の隙間が小さい場合であっても、ウェハ24が、各開口部101a,60aに衝突することを防ぐことができる。
このような第2実施形態であっても、旋回軸線A0を背面壁111寄りに配置し、ロボットアーム41の最小回転半径Rが、前記減算値(B−L0)の1/2を超えて、前記減算値(B−L0)以下に設定されることで、第1実施形態と同様の効果を得ることができる。
図11は、本発明の第3実施形態の基板搬送方法が実施されるウェハ移載装置23Bを簡略化して示す平面図である。図11には、ウェハ搬送ロボット27の他の可動状態の形状の一例を2点鎖線で示す。第3実施形態のウェハ移載装置23Bは、第1実施形態のウェハ移載装置23と類似した構成を示し、類似した構成については、説明を省略し、同様の参照符号を付する。第3実施形態のウェハ移載装置23Bは、ウェハ搬送ロボット27のリンク長さが、第1実施形態と異なり、他の構成については、第1実施形態と同様である。
第1実施形態では、第1軸間距離L11と第2軸間距離L12とが同一寸法であるとした。しかしながら本発明は、これに限定されない。第3実施形態では、第1軸間距離L11と第2軸間距離L12とが少し異なり、第1軸間距離L11のほうが第2軸間距離L12に比べて、やや大きく形成される。この場合、図11に示すように、第3リンク体41cの第2関節軸線A2まわりに角変位を停止させて、第1リンク体41aを旋回軸線A0まわりに単位時間あたりに角変位する角変位量に対して、2倍の角変位量で、第2リンク体41bを第1関節軸線A1まわりに単位時間に角変位させると、第3リンク体41cの姿勢が若干変化する。
ロボットハンド40が、旋回軸線L0に対して、左右方向Y一方から左右方向Y他方に進むと、ロボットハンド40が把持するウェハ24の中心位置A3および、第2関節軸線A2の移動軌跡130,131が、前方X1に膨らむ円弧状に形成される。図11では、理解を容易にするために、中心位置A3および、第2関節軸線A2の移動軌跡130,131を破線で示し、左右方向Yに平行に延びる仮想線132,133を一点鎖線で示す。
この場合、第1軸間距離L11と第2軸間距離L12との差が小さい場合には、第3リンク体41cをほぼ平行に左右方向Yに移動させることができる。このように少々第1軸線距離L11と第2軸線距離L12とが変更してもよい。たとえば第1軸間距離L11と第2軸間距離L12とで許容される寸法差は、B−L0−E−L1mm以内に設定される。
このような第3実施形態であっても、旋回軸線A0を背面壁111寄りに配置し、ロボットアーム41の最小回転半径Rが、前記減算値(B−L0)の1/2を超えて、前記減算値(B−L0)以下に設定されることで、第1実施形態と同様の効果を得ることができる。また第1〜第3実施形態のロボットアーム41の各リンク体41a〜41cの長さ、軸間距離L11,L12は、一例であって変更してもよい。たとえば第1リンク距離L11、第2リンク距離L12、第3リンク距離L13は、同一距離でなくてもよい。
図12は、本発明の第4実施形態の基板搬送方法が実施される半導体処理設備20Cの一部を示す平面図である。第4実施形態の半導体処理設備20Aは、第1実施形態の半導体処理設備20と類似した構成を示し、類似した構成については、説明を省略し、同様の参照符号を付する。第4実施形態の半導体処理設備20Cは、ウェハ移載装置23に備えられるウェハ搬送ロボット27は、ウェハ処理装置22に備えられる搬送装置を兼用する。他の構成については、第1実施形態と同様であるので説明を省略する。
第1実施形態では、ウェハ処理装置22が有する搬送装置は、ウェハ移載装置23によって準備空間29から処理空間30に搬送されるウェハ24を受取り、受取ったウェハ24をウェハ処理位置に搬送する。これに対して、第4実施形態では、図12に示すように、ウェハ移載装置23のウェハ搬送ロボット27は、動作領域を広げることができるので、ウェハ移載装置23内でのウェハ移載に限らず、ウェハ処理装置22の処理空間30に侵入して、ウェハ24をウェハ処理位置に直接搬送する。したがってウェハ処理装置22には、搬送装置を不要とすることができ、ウェハ処理設備の部品点数を減らすことができ、製造コストを低減することができる。
第4実施形態では、背面側開口121は、左右方向Yに関して、旋回軸線A0近傍に配置されることが好ましい。また背面側開口121は、ウェハ搬送ロボット27の最小回転半径Rを半径として旋回軸線A0まわりに一周する仮想円が、背面壁111と交差する2つのうち一方の位置である第1交差位置P1から、旋回軸線A0を通過して前後方向Xに延びる直線が背面壁111と交差する第2交差位置P2までの間以上の間隔を有し、第1交差位置P1から第2交差位置P2を含む形状に形成されることが好ましい。これによって第1リンク体41aを旋回軸線A0まわりに角変位させて、第1リンク体41aが背面壁111に衝突することを防いで、第1リンク体41aに設定される第1関節軸線A1を、準備空間29に配置することができる。これによって準備空間29のうちで、背面壁111から後方X2に離れた位置にウェハ24を移動させることができる。
また上述した各実施形態1〜4は、本発明の一例示であって発明の範囲内で変更可能である。たとえば本実施の形態では、ウェハ処理設備20に用いられるウェハ移載装置23について説明したが、半導体ウェハ以外の基板を処理する基板処理設備に用いられる基板移載装置であっても本発明に含まれる。この場合、基板移載装置は、基板収容容器から雰囲気気体が調整された準備空間を経由して、基板処理装置に移載するとともに、基板処理装置から準備空間を経由して基板収容容器に搬送する基板移載装置全般に適用することができる。たとえば基板としては、半導体基板のほか、ガラス基板であってもよい。またウェハのサイズは、300mmを前提として説明したが、他のサイズである場合には、他のサイズに適したリンク寸法のロボットアームを適用することができる。
また本実施の形態の基板搬送方法では、ウェハ移載装置23は、アライナ56を有したが、アライナ56以外の処理デバイスを有していてもよい。処理デバイスは、準備空間29でウェハを保持して予め定める処理または動作を行うための装置である。たとえば処理デバイスとしては、ウェハ56を準備空間29で保持するバッファ体、ウェハを準備空間29で保持して、品質および不良品の有無などを検査する検査デバイスであってもよい。またウェハ移載装置23がアライナ56などの処理デバイスを有していなくても、本発明に含まれる。
またフープオープナが3つ以下であっても、処理デバイスにウェハ24を搬送するために、ウェハ24を左右方向に広範囲にわたって移動させる必要がある場合などには、本発明を適用することで、準備空間の前後方向寸法Bが小さくても、ウェハを好適に搬送することができる。この場合、旋回軸線A0の左右方向Yの位置は、左右方向に移動すべき対象物の位置によって適宜定められる。またフープオープナに代えて、基板容器を設置する基板容器設置台が設けられてもよい。
また本実施の形態では、第1リンク体41aが、旋回軸線A0を含んで前後方向Xに延びる基準線P0に対して、旋回軸線A0まわり周方向一方および周方向他方に90°角変位可能としたが、これに限定されない。また本実施形態では、前後方向X、左右方向Y、上下方向Zとしたが、それぞれ互いに直交する3つの方向である第1方向、第2方向および第3方向に対応してもよい。
本発明は、次の実施の形態が可能である。
(1)前記最小回転半径Rは、準備空間の前後方向寸法Bから、準備空間形成部の背面壁から旋回軸線までの前後方向距離L0と、フープオープナによって設定される正面壁から背面壁側の前後方向のロボット侵入禁止領域寸法Eとを減算した許容寸法(B−L0−E)以下に設定(R≦B−L0−E)されることを特徴とするウェハ移載装置。
最小回転半径Rが、許容寸法(B−L0−E)以下に設定されることで、ロボットアームが正面壁に最も近接した状態であっても、ロボットアームの一部がフープオープナの可動領域に侵入することを防ぐことができる。これによってフープオープナの可動状態にかかわらず、ロボットアームとフープオープナとが干渉することを防ぐことができる。
最小回転半径Rが、許容寸法(B−L0−E)以下に設定されることで、ロボットアームが正面壁に最も近接した状態であっても、ロボットアームの一部がフープオープナの可動領域に侵入することが防ぐことを防止することができる。これによってロボットアームとフープオープナとの接触を防いで、ウェハ移載装置の動作不良を防ぐことができる。
(2)ロボットアームは、
基台に一端部が連結されて、前記旋回軸線まわりに角変位可能に構成され、前記旋回軸線に平行な第1関節軸線が設定される第1リンク体と、
第1リンク体の他端部に、一端部が連結されて、前記第1関節軸線まわりに角変位可能に構成され、前記旋回軸に平行な第2関節軸線が設定される第2リンク体と、
第2リンク体の他端部に、一端部が連結されて、前記第2関節軸線まわりに角変位可能に構成され、他端部に基板を把持するロボットハンドが形成される1または複数の第3リンク体とを有し、
旋回軸線から、旋回軸線に対して第1関節軸線に向かう半径方向に最も遠ざかる第1リンク体の端部までの距離である第1リンク距離L1が、前記許容方向寸法(B−L0−E)の1/2を超えて、前記許容寸法(B−L0−E)以下に設定((B−L0−E)/2<L1≦B−L0−E)されることを特徴とするウェハ移載装置。
第1リンク距離L1が、前記許容寸法(B−L0−E)の1/2を超え、許容寸法(B−L0−E)以下に設定される。これによって第1リンク体が、正面壁に最も近接した状態であっても、第1リンク体の一部がフープオープナの可動領域に侵入することを防ぐことができる。これによって正面壁との干渉を防いで、第1リンク体の他端部を、旋回軸線に対して、左右方向両側に移動させることができる。また第1リンク距離L1を、許容寸法(B−L0−E)以下としたうえで、可及的に大きくすることで、正面壁およびフープオープナと第1リンク体との干渉を防ぐとともに、旋回軸線に対して、左右方向両側の離れた位置に第1リンク体の他端部を移動させることができ、第1リンク体の動作範囲を大きくすることができる。
第1リンク距離L1が、準備空間の前後方向寸法Bの1/2を超え、前記許容寸法(B−L0−E)以下に設定される。これによって第1リンク体が正面壁およびフープオープナと干渉することを防いで、第1リンク体のリンク長さを大きくすることができる。また第1リンク体の角変位動作領域を360°未満、たとえば180°程度に制限することで、第1リンク体が背面壁に干渉することを防ぐことができる。第1リンク体を大きくすることで、第2リンク体および第3リンク体を、旋回軸線から、左右方向に離れた位置に配置することができ、ロボットの可動領域を左右方向に拡大させることができる。
(3)旋回軸線から第1関節軸線までの第1軸間距離L11と、第1関節軸線から第2関節軸線までの第2軸間距離L12とが同一に設定され、
第2関節軸線から、第2関節軸線に対して第1関節軸線に向かう半径方向に最も遠ざかる第2リンク体の端部までの距離である第2リンク距離L2は、前記許容方向寸法(B−L0−E)の1/2を超えて、前記許容寸法(B−L0−E)以下に設定されることを特徴とするウェハ移載装置。
旋回軸線方向に関して、第2リンク体を第1リンク体に重ねて、旋回軸線と、第2関節軸線とを一致させた状態では、旋回軸線から最も遠ざかる第2リンク体の端部までの距離が、前記許容寸法(B−L0−E)以下となる。したがって旋回軸線と、第2関節軸線とを一致させた状態では、第2リンク体の一部がフープオープナの可動領域に侵入することを防ぐことができる。また第2リンク距離L2について、許容寸法(B−L0−E)以下としたうえで、可及的に大きくすることで、正面壁およびフープオープナと第2リンク体との干渉を防ぐとともに、左右方向両側の離れた位置に第2リンク体の他端部を移動させることができ、第2リンク体の動作範囲を大きくすることができる。
また第1軸間距離L11と、第2軸間距離L12とを同一とすることで、第1リンク体の旋回軸線まわりの角変位量に対して、第2リンク体の第1角変位軸線まわりの角変位量を2倍とすることで、第2リンク体の他端部を左右方向に平行移動させることができ、アーム体の制御を容易に行うことができる。ここで同一とは、実質的に同一な状態を含み、同一および略同一な状態を含む。
第2リンク距離L2が、準備空間の前後方向寸法Bの1/2を超え、前記許容寸法(B−L0−E)以下に設定される。これによって第1リンク体と第2リンク体とを重ねて、ロボットアームを最小変形状態とすることで、第2リンク体が、正面壁およびフープオープナに干渉することを防いで、第2リンク体のリンク長さを大きくすることができる。第2リンク体を大きくすることで、第3リンク体を、旋回軸線から、左右方向に離れた位置に配置することができ、ロボットの可動領域を左右方向に拡大させることができる。
(4)ウェハをロボットハンドが把持した状態で、第2関節軸線から、第2関節軸線に対して半径方向に最も遠ざかる第3リンク体の端部またはウェハ部分までの距離である第3リンク距離L3は、前記許容方向寸法(B−L0−E)の1/2を超えて、前記許容寸法(B−L0−E)以下に設定されることを特徴とするウェハ移載装置。
旋回軸線方向に関して、第1〜第3リンク体を重ねて、旋回軸線と、第2関節軸線とを一致させた状態では、旋回軸線から最も遠ざかる第3リンク体の端部までの距離が、前記許容寸法(B−L0−E)以下となる。したがって旋回軸線と、第2関節軸線とを一致させた状態では、第3リンク体の一部または第3リンクに保持されるウェハの一部が、フープオープナの可動領域に侵入することを防ぐことができる。また第3リンク距離L3を、許容寸法(B−L0−E)以下としたうえで、可及的に大きくすることで、正面壁およびフープオープナと第3リンク体との干渉を防ぐとともに、左右方向両側の離れた位置に第3リンク体の他端部を移動させることができ、第3リンク体の動作範囲を大きくすることができる。
第3リンク距離L2が、準備空間の前後方向寸法Bの1/2を超え、前記許容寸法(B−L0−E)以下に設定される。これによって第1〜第3リンクをそれぞれ重ねて、ロボットアームを最小変形状態とすることで、第3リンク体が、正面壁およびフープオープナに干渉することを防いで、第3リンク体のリンク長さを大きくすることができる。第3リンク体を大きくすることで、第3リンク体に保持されるウェハを、旋回軸線から、左右方向に離れた位置に配置することができ、ロボットの可動領域を左右方向に拡大させることができる。
(5)前記第1リンク距離L1、第2リンク距離L2および第3リンク距離L3が、前記許容寸法(B−L0−E)と同一に設定されることを特徴とするウェハ移載装置。
第1〜第3リンク距離L1〜L3が、許容寸法(B−L0−E)と同一に設定される。これによってロボットアームを最小変形状態とした場合に、各リンク体が正面壁およびフープオープナと接触することを防ぐことができる。ここで同一とは、実質的に同一な状態を含み、同一および略同一な状態を含む。また干渉を防ぎつつ、各リンク体の長さが最大限大きく設定されるので、左右方向に関してロボットアームの動作範囲を大きくすることができる。これによって左右方向に離れた位置に、正面側開口および背面側開口が形成される場合でも、ロボットアームによってウェハを搬入および搬出することができる。
第1〜第3リンク距離L1〜L3が、許容寸法(B−L0−E)と同一に設定される。これによってロボットアームを最小変形状態とした場合に、各リンク体が正面壁およびフープオープナと接触することを防ぐことができる。また、各リンク体の長さを可及的に大きくすることができるので、左右方向に関してロボットアームの動作範囲を大きくすることができる。これによって左右方向に離れた位置に、正面側開口および背面側開口が形成される場合でも、ロボットアームによってウェハを搬入および搬出することができる。
(6)準備空間形成部は、前後方向と旋回軸線方向とに直交する左右方向に関して並ぶ4つの正面側開口が形成され、
フープオープナは、各正面側開口をそれぞれ開閉するために4つ設けられることを特徴とするウェハ移載装置。
上述したように準備空間の前後方向寸法Bが小さい場合でも、ロボットアームの左右方向の動作範囲を大きくすることができる。これによってフープオープナが4つ設けられる場合であっても、ロボットに走行軸を設けることなく、またロボットアームのリンク数を多くすることなく、各フープオープナに装着される基板容器に対して、ウェハ処理装置に対するウェハの搬入および搬出を行うことができる。
上述したように準備空間の前後方向寸法Bが小さい場合でも、ロボットアームの左右方向の動作範囲を大きくすることができる。これによってフープオープナが4つ設けられる場合であっても、ロボットに走行軸を設けることなく、またロボットアームのリンク数を多くすることなく、各フープオープナに装着される基板容器に対して、ウェハ処理装置に対するウェハの搬入および搬出を行うことができる。フープオープナが4つ設けられることで、基板容器のウェハ移載装置に対する搬送および着脱動作と、ウェハ移載装置に保持される基板容器内のウェハの移載動作とを並列して行うことができ、作業効率を向上することができる。
(7)基板処理を行う基板処理装置に対して、予め調整される雰囲気気体で満たされる準備空間で基板の搬入および搬出を行う基板移載装置であって、
前記準備空間を規定し、予め定める前後方向に間隔をあけて配置される正面壁と背面壁とを有し、正面壁に第1出入口が形成され、背面壁に第2出入口が形成される準備空間形成部と、
準備空間形成部の第1出入口を開閉する開閉手段と、
準備空間に配置され、第1出入口と第2出入口とにわたって基板を搬送する基板搬送ロボットとを含み、
基板搬送ロボットは、
準備空間形成部に固定され、予め定める旋回軸線が設定される基台と、
基台に一端部が連結されて、前記旋回軸線まわりに角変位可能に構成され、前記旋回軸線に平行な第1関節軸線が設定される第1リンク体と、
第1リンク体の他端部に、一端部が連結されて、前記第1関節軸線まわりに角変位可能に構成され、前記旋回軸に平行な第2関節軸線が設定される第2リンク体と、
第2リンク体の他端部に、一端部が連結されて、前記第2関節軸線まわりに角変位可能に構成され、他端部に基板を把持するロボットハンドが形成される1または複数の第3リンク体と、
各リンク体を対応する関節軸まわりにそれぞれ個別に角変位駆動する駆動手段とを含んで構成され、
旋回軸線は、準備空間の前後方向他方寄りに配置されて、
旋回軸線から、旋回軸線に対して第1関節軸線に向かう半径方向に最も遠ざかる第1リンク体の端部までの距離である第1リンク距離L1が、準備空間形成部の正面壁と背面壁との間の寸法となる準備空間の前後方向寸法Bの1/2を超えて、準備空間の前後方向寸法Bから、準備空間形成部の背面壁から旋回軸線までの前後方向距離L0を減算した値(B−L0)以下に設定(B/2<L1≦B−L0)されることを特徴とする基板移載装置。
ウェハ移載装置ロボットアームの最小回転半径Rが、準備空間の前後方向寸法Bの1/2を超えることで、第1および第2従来技術に比べて、ロボットアームの最小回転半径Rを大きくすることができる。またロボットアームの最小回転半径Rが、前記減算値(B−L0)以下に設定されることで、最小変形状態のロボットアームと、正面壁との間に隙間を形成することができ、ロボットアームと正面壁とが干渉することを防ぐことができる。
これによって準備空間の前後方向寸法Bが小さくても、ロボットアームのリンク体のリンク長さを大きくすることができ、ロボットアームが正面壁と干渉することを防ぐことができる。したがってロボットアームの動作範囲を大きくすることができる。特に、前後方向と旋回軸線方向とに垂直な左右方向に関してロボットアームの動作範囲を大きくすることができる。これによって走行手段を必要とせず、またリンク体の数が不所望に増加することを防ぐことができる。
ロボットアームの最小回転半径Rが、上述した関係(B/2<R≦B−L0)に設定される。これによってロボットアームが正面壁と干渉することを防いで、ロボットアームのリンク体のリンク長さを大きくすることができる。またロボットアームの角変位動作領域を360°未満、たとえば180°程度に制限することで、ロボットアームが背面壁に干渉することも防ぐことができる。
これによってロボットを左右方向に走行駆動させる走行手段を不必要として、走行手段で発生する塵埃を防ぐことができ、準備空間のクリーン度の低下を防ぐことができる。またロボットアームに必要なリンク数を減らすことができ、ロボットの構造を簡単化することができる。またロボットの冗長性を減らすことができ、準備空間形成部にロボットアームが衝突する可能性を減らすことができる。
このように本発明では、走行手段の不要に起因して塵埃の飛散を抑えることができるとともに、リンク数の増加を抑えることで、基板移載装置内での干渉を防ぐことができ、構造および制御が簡単な基板搬送ロボットを備える基板移載装置を提供することができる。基板移載装置は、半導体ウェハのほか、予め定められる調整空間で処理される基板であればよく、ガラス基板などの他の基板であってもよい。