JP4635131B2 - ランダム走行車輪荷重による舗装のホイールトラッキング試験方法およびランダム走行車輪荷重による舗装のホイールトラッキング試験装置。 - Google Patents
ランダム走行車輪荷重による舗装のホイールトラッキング試験方法およびランダム走行車輪荷重による舗装のホイールトラッキング試験装置。 Download PDFInfo
- Publication number
- JP4635131B2 JP4635131B2 JP2004360778A JP2004360778A JP4635131B2 JP 4635131 B2 JP4635131 B2 JP 4635131B2 JP 2004360778 A JP2004360778 A JP 2004360778A JP 2004360778 A JP2004360778 A JP 2004360778A JP 4635131 B2 JP4635131 B2 JP 4635131B2
- Authority
- JP
- Japan
- Prior art keywords
- test
- wheel
- specimen
- slide table
- test wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Investigating Strength Of Materials By Application Of Mechanical Stress (AREA)
- Road Repair (AREA)
Description
但し、μ:発生頻度が最も大きい中心位置
σ:標準偏差
1a:コンクリート床版
1b:防水膜材
1c:アスファルト舗装層
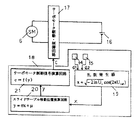
2:試験車輪
3:スライドテーブル
4:スライドテーブル移動位置決め機構(スライドテーブル移動位置決め手段)
5:案内レール
6:サーボモータ
7:ボールねじ
8:移動体
8a:移動体の一端
9:荷重体
10:案内レール
11:伝動歯車
12:移動体駆動歯車(移動体駆動用回転体)
12 a:移動体駆動歯車の偏心軸
13:連結杆
14:試験車輪位置検知器
15:試験車輪位置検知器
16:電源
17:サーボモータ駆動・制御回路
(スライドテーブル駆動・制御回路)
18:サーボモータ制御信号発生回路
(スライドテーブル移動制御信号発生回路)
19:乱数発生器
20:スライドテーブル移動位置演算回路
21:サーボモータ制御信号演算回路
(スライドテーブル制御信号演算回路)
L:移動体駆動歯車の偏心軸の偏心距離
R:試験車輪走行手段/移動体駆動手段
S:試験車輪の車軸
X:試験車輪の走行方向
Y:スライドテーブルの移動方向/供試体の移動方向/試験車輪の車軸方向
c:サーボモータ制御信号
(スライドテーブル移動制御信号)
d1:試験車輪位置信号
d2:試験車輪位置信号
m0,m1,m2・・・mn:試験車輪走行軌跡
m0:発生頻度が最も高い試験車輪走行軌跡
m:試験車輪走行軌跡群
p:試験車輪走行軌跡の発生頻度/スライドテーブルの移動位置の発生頻度/
供試体の移動位置の発生頻度
x:正規乱数
y:スライドテーブル移動位置/スライドテーブル移動位置信号/
供試体移動位置/供試体移動位置信号
Claims (7)
- 被試験舗装道路と同質の構成を備えて被試験舗装道路に見立てた供試体上で、舗装道路上を走行する車両の車輪に見立てた試験車輪を何回も反復走行させ、その反復走行過程において、試験車輪を走行方向Xの同一直線軌跡で走行させると共に、その試験車輪の走行範囲を、試験車輪が供試体上を走行し終えて供試体から離れた位置に至る迄の範囲とし、前記試験車輪が前記供試体上を走行し終えて供試体から離れている状態で、前記供試体を、前記試験車輪の走行方向Xとは異なる移動方向Yに変化する移動位置に、その移動位置とその移動位置の発生頻度を正規分布特性に従ってランダムに制御しながら移動させて位置決めし、その移動位置決め後に前記試験車輪を前記供試体上への次回の走行に移行させることを特徴とするランダム走行車輪荷重による舗装のトラッキング試験方法。
- 試験車輪の走行方向Xと供試体の移動方向Yが直交関係にあることを特徴とする請求項1に記載のランダム走行車輪荷重による舗装のトラッキング試験方法。
- 被試験舗装道路と同質の構成で被試験舗装道路に見立てた供試体を保持するスライドテーブルと;舗装道路上を走行する車両の車輪に見立てて前記供試体上を走行する試験車輪と;底部に前記試験車輪が装着され且つ重量調整可能な荷重が付加される移動体と;前記試験車輪を走行方向Xの同一直線軌跡で走行させると共にその試験車輪が供試体上を走行し終えて供試体から離れた位置に至る迄の範囲で反復走行させる試験車輪走行手段と;前記供試体を保持したスライドテーブルを、試験車輪の走行方向Xとは異なる移動方向Yにランダムに変化する移動位置に移動させて位置決めするスライドテーブル移動位置決め手段と;前記試験車輪が前記供試体上を走行し終えて供試体から離れた位置にあることを検知して、前記スライドテーブルの移動位置とその移動位置の発生頻度が正規分布特性に従うスライドテーブル移動位置信号を前記試験車輪の1回の走行毎にランダムに発生させ、 そのスライドテーブル移動位置信号に基づいてスライドテーブル移動制御信号を発生させるスライドテーブル移動制御信号発生回路と;前記スライドテーブル移動制御信号に基づいて前記スライドテーブル移動位置決め手段を駆動制御するスライドテーブル駆動・制御回路を備えたことを特徴とするランダム走行車輪荷重による舗装のトラッキング試験装置。
- 移動体駆動用回転体の偏心位置に連結杆の一端が回動自在に軸支されその連結杆の多端が移動体に回動自在に軸支され、前記試験車輪を走行方向Xの同一直線軌跡で且つ前記供試体上を超えてその供試体から離れた位置に至る迄の範囲で往復走行させる試験車輪走行手段を備えたことを特徴とする請求項3に記載のランダム走行車輪荷重による舗装のトラッキング試験装置。
- 試験車輪が供試体上を走行し終えて供試体から離れた位置にあることを検知して試験車輪位置信号を発する試験車輪位置検知器と、前記試験車輪位置信号を受けて前記試験車輪の1回の走行毎に正規乱数xを出力する乱数発生器と、前記正規乱数xを基にスライドテーブルの移動位置とその移動位置の発生頻度が正規分布特性に従うスライドテーブル移動位置信号yをランダムに発生するスライドテーブル移動位置演算回路と、前記スライドテーブル移動位置信号yを基にスライドテーブル移動制御信号cを発生するスライドテーブル移動制御信号演算回路を含むスライドテーブル移動制御信号発生回路を備えたことを特徴とする請求項3に記載のランダム走行車輪荷重による舗装のトラッキング試験装置。
- 試験車輪の走行方向Xと供試体の移動方向Yが直交関係にあることを特徴とする請求項3ないし請求項5のいずれか1項に記載のランダム走行車輪荷重による舗装のトラッキング試験装置。
- コンクリート床版の上に防水膜材を介してアスファルト舗装層が積層された被試験舗装道路と同質の構成で被試験舗装道路に見立てた供試体を保持するスライドテーブルと;舗装道路上を走行する車両の車輪に見立てて前記供試体上を走行する試験車輪と;底部に前記試験車輪が装着され且つ重量調整可能な荷重が付加される移動体と;駆動モータで回転させる伝動歯車と噛み合う移動体駆動歯車の偏心位置に連結杆の一端が回動自在に軸支されその連結杆の多端が前記移動体に回動自在に軸支されて成り、前記試験車輪を走行方向Xの同一直線軌跡で且つ前記供試体上を超えてその供試体から離れた位置に至る迄の範囲で往復走行させる試験車輪走行手段と;サーボモータで回転させるボールねじが前記スライドテーブルに螺合して成り、前記供試体を保持したスライドテーブルを前記試験車輪の走行方向Xと直交関係となる移動方向Yの移動位置に移動させて位置決めするスライドテーブル移動位置決め機構と;前記試験車輪が前記供試体上を走行し終えて供試体から離れた位置にあることを検知して試験車輪位置信号を発する試験車輪位置検知器、前記試験車輪位置信号を受けて前記試験車輪の1回の走行毎に正規乱数xを出力する乱数発生器、前記正規乱数xを基に前記スライドテーブルの移動位置とその移動位置の発生頻度が正規分布特性に従うスライドテーブル移動位置信号yをランダムに発生するスライドテーブル移動位置演算回路、および前記スライドテーブル移動位置信号yを基に前記サーボモータの制御信号cを発生するサーボモータ制御信号演算回路を含むサーボモータ制御信号発生回路と;前記サーボモータ制御信号cに基づき前記サーボモータを駆動するサーボモータ駆動・制御回路を備えたことを特徴とするランダム走行車輪荷重による舗装のトラッキング試験装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004360778A JP4635131B2 (ja) | 2004-12-14 | 2004-12-14 | ランダム走行車輪荷重による舗装のホイールトラッキング試験方法およびランダム走行車輪荷重による舗装のホイールトラッキング試験装置。 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004360778A JP4635131B2 (ja) | 2004-12-14 | 2004-12-14 | ランダム走行車輪荷重による舗装のホイールトラッキング試験方法およびランダム走行車輪荷重による舗装のホイールトラッキング試験装置。 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006170680A JP2006170680A (ja) | 2006-06-29 |
| JP4635131B2 true JP4635131B2 (ja) | 2011-02-16 |
Family
ID=36671610
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004360778A Expired - Fee Related JP4635131B2 (ja) | 2004-12-14 | 2004-12-14 | ランダム走行車輪荷重による舗装のホイールトラッキング試験方法およびランダム走行車輪荷重による舗装のホイールトラッキング試験装置。 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4635131B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107764630A (zh) * | 2017-10-19 | 2018-03-06 | 长安大学 | 一种测试沥青路面剪切破坏的试验装置 |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2283229B2 (es) * | 2007-01-25 | 2008-06-16 | Universidad Politecnica De Madrid | Mejoras en el equipo y en el procedimiento para evaluar la autorreparacion de mezclas asfalticas. |
| DE102007048839B4 (de) * | 2007-10-11 | 2009-08-20 | Technische Universität Darmstadt | Vorrichtung und Verfahren zum Untersuchen der Verschleißfestigkeit einer Oberfläche einer Straßenbelagsprobe |
| JP5051847B2 (ja) * | 2008-02-15 | 2012-10-17 | 国立大学法人神戸大学 | アスファルト混合物の評価方法及び評価装置 |
| IT1397945B1 (it) * | 2010-02-01 | 2013-02-04 | Mecpart S R L Ora Mecpart S P A | Compattatore a rullo integrato a macchina ormaiaiola per prove di laboratorio su conglomerati bituminosi |
| CN102305801B (zh) * | 2011-05-27 | 2013-04-24 | 丹东市无损检测设备有限公司 | 火车轮盘检测装置 |
| CN104215498B (zh) * | 2013-05-29 | 2016-10-05 | 福州美德实验仪器有限公司 | 一种多功能车辙试验仪 |
| CN103344497B (zh) * | 2013-06-19 | 2015-07-01 | 福州大学 | 散体集料路床力学参数试验方法及其装置 |
| CN103471946B (zh) * | 2013-08-23 | 2016-03-02 | 长安大学 | 一种水泥混凝土路面加速磨耗试验装置及其试验方法 |
| KR101498199B1 (ko) * | 2013-11-07 | 2015-03-05 | (주)제이에프엠엔지니어링 | 전기차 충전용 컨넥터의 압축 시험장치 |
| CN104792607A (zh) * | 2015-04-21 | 2015-07-22 | 武汉友枫模塑有限责任公司 | 一种车辙试验分析仪 |
| CN105842077A (zh) * | 2016-05-19 | 2016-08-10 | 青岛信希塑胶有限公司 | 自动脚轮行走试验机及试验方法 |
| CN106018145B (zh) * | 2016-06-21 | 2019-02-15 | 长安大学 | 一种含砂雾封层耐磨耗及负荷粘砂的联合测定装置 |
| KR101877295B1 (ko) * | 2017-02-28 | 2018-07-11 | (주)이큐브시스템 | 레일과 차륜의 피로 또는 마모 시험 장치 |
| JP6745067B2 (ja) * | 2017-03-31 | 2020-08-26 | 住友大阪セメント株式会社 | コンクリートのすべり抵抗試験方法、細骨材の選定方法、及び、コンクリートの製造方法 |
| RU173579U1 (ru) * | 2017-04-18 | 2017-08-31 | Сергей Юрьевич Андронов | Устройство для проведения испытаний на колееобразование дорожных композиционных смесей |
| RU2642978C1 (ru) * | 2017-04-18 | 2018-01-29 | Сергей Юрьевич Андронов | Стенд для проведения испытаний на колееобразование дорожных композиционных смесей |
| CN108196039B (zh) * | 2018-03-15 | 2024-02-27 | 郑州大学 | 破碎块体间裂缝特性及其对加铺层影响的模拟装置及方法 |
| CN109060381B (zh) * | 2018-08-28 | 2024-04-02 | 山东高速集团有限公司 | 单点式大型足尺路面加速加载系统用车辙测试装置及方法 |
| CN109724893B (zh) * | 2019-03-18 | 2022-06-28 | 广东华路交通科技有限公司 | 一种测试隧道内超薄磨耗层耐久性能的测试装置与方法 |
| CN110018044A (zh) * | 2019-04-17 | 2019-07-16 | 南京理工大学 | 一种基于数字图像的钢桥面铺装模量测试装置 |
| CN110579361B (zh) * | 2019-09-25 | 2024-06-07 | 中信戴卡股份有限公司 | 一种车轮试验机 |
| CN110793844B (zh) * | 2019-12-18 | 2024-08-16 | 安徽省路兴建设项目管理有限公司 | 一种沥青路面车辙实验用检测装置 |
| CN112033831A (zh) * | 2020-07-16 | 2020-12-04 | 中交一公局集团有限公司海外分公司 | 车辙试验仪 |
| CN111982661A (zh) * | 2020-09-04 | 2020-11-24 | 深圳市市政工程总公司 | 道路半刚性基层材料抗冲刷实验装置 |
| CN112113872A (zh) * | 2020-09-24 | 2020-12-22 | 华北水利水电大学 | 无机结合料稳定材料冲刷模拟试验装置及检测方法 |
| CN113029720B (zh) * | 2021-03-11 | 2024-03-15 | 南充市公信检测有限公司 | 一种车辙试样成型机 |
| CN113218852B (zh) * | 2021-05-19 | 2024-10-25 | 湖南大学 | 一种沥青混合料耐久性试验装置 |
| CN113654911B (zh) * | 2021-08-31 | 2025-05-13 | 苏州恒信建设技术开发检测有限公司 | 一种沥青混合料车辙检测装置 |
| CN114383960B (zh) * | 2022-01-20 | 2024-01-02 | 广西北投交通养护科技集团有限公司 | 一种沥青混合料抗车辙能力试验装置及其使用方法 |
| CN114778346B (zh) * | 2022-04-21 | 2024-04-12 | 合肥工业大学 | 一种行车荷载模拟装置 |
| CN115839890A (zh) * | 2022-12-02 | 2023-03-24 | 云南省交通规划设计研究院有限公司 | 一种智能路面混合料饱水状态动水破坏试验仪及其方法 |
| CN118566053B (zh) * | 2024-05-20 | 2025-01-28 | 东莞市同盛新材料科技有限公司 | 一种适于沥青混凝土试件的飞散实验装置 |
| CN119246208A (zh) * | 2024-08-29 | 2025-01-03 | 广东省公路建设有限公司湾区特大桥养护技术中心 | 一种车桥往复式路桥面疲劳试验装置及方法 |
| CN119804199B (zh) * | 2024-12-31 | 2026-01-02 | 同济大学 | 一种沥青路面表面纹理多尺加速磨耗设备及方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4129341B2 (ja) * | 1999-08-24 | 2008-08-06 | 株式会社ブリヂストン | 荷重移動試験装置 |
| JP2002082033A (ja) * | 2000-06-30 | 2002-03-22 | Abe Yorimasa | 荷重移動試験装置及び荷重移動試験方法 |
| JP2002214102A (ja) * | 2001-01-15 | 2002-07-31 | Nikken Kk | 荷重移動試験装置 |
-
2004
- 2004-12-14 JP JP2004360778A patent/JP4635131B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107764630A (zh) * | 2017-10-19 | 2018-03-06 | 长安大学 | 一种测试沥青路面剪切破坏的试验装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006170680A (ja) | 2006-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4635131B2 (ja) | ランダム走行車輪荷重による舗装のホイールトラッキング試験方法およびランダム走行車輪荷重による舗装のホイールトラッキング試験装置。 | |
| Guthrie et al. | Automated air-coupled impact-echo testing of a concrete bridge deck from a continuously moving platform | |
| JP4014264B2 (ja) | タイヤのトレツド剛性の決定装置及び関連の方法 | |
| WO2009145258A1 (ja) | 走行試験装置のベルト蛇行防止装置及びベルト蛇行防止方法 | |
| CN108562536A (zh) | 路面材料摩擦性能测试装置及方法 | |
| WO2010007454A3 (en) | Method for in-situ determining the compactness of grainy material layers and device for performing the process | |
| CN105890646A (zh) | 一种施工现场碾压车工况获取方法及装置 | |
| Kang et al. | Rapid damage assessment of concrete bridge deck leveraging an automated double-sided bounce system | |
| JP5534587B2 (ja) | ゴム試験機 | |
| CN109855947A (zh) | 双驱动轮轨实物滚动接触疲劳试验机 | |
| JP2021011771A (ja) | 振動ローラの自動運転による締固め品質管理システム及び締固め品質管理方法 | |
| CN104374830A (zh) | 一种基于压电阵列的近场相控阵结构健康监测方法 | |
| EP2198262B1 (de) | Vorrichtung und verfahren zum untersuchen der verschleissfestigkeit einer oberfläche einer strassenbelagsprobe | |
| JP4129341B2 (ja) | 荷重移動試験装置 | |
| RU2426662C1 (ru) | Способ диагностирования тормозной системы автомобиля | |
| Jurado et al. | Evaluation of asphalt damage and cracking development with seismic pavement analyzer | |
| US20230124311A1 (en) | Ultrasonic device, method for measuring elasticity of a biological tissue | |
| JPH0711605A (ja) | 振動ローラの起振力制御装置 | |
| GB2394061A (en) | Testing road surface materials | |
| Lee et al. | Evaluation of healing effect by rest periods on asphalt concrete slab using MMLS3 and NDE techniques | |
| JP5534586B2 (ja) | ゴム試験機およびゴム試験方法 | |
| CN105319075B (zh) | 试验装置以及试验方法 | |
| KR100309180B1 (ko) | 그루브 원더 시험 장치 | |
| JP6355257B2 (ja) | ゴム摩擦試験方法及びゴム摩擦試験機 | |
| Abraham et al. | Laser ultrasonics for civil engineering: some applications in development for concrete non destructive testing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100223 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100907 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100927 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |