JP4589998B2 - 投影露光装置及び投影露光方法 - Google Patents
投影露光装置及び投影露光方法 Download PDFInfo
- Publication number
- JP4589998B2 JP4589998B2 JP2008514490A JP2008514490A JP4589998B2 JP 4589998 B2 JP4589998 B2 JP 4589998B2 JP 2008514490 A JP2008514490 A JP 2008514490A JP 2008514490 A JP2008514490 A JP 2008514490A JP 4589998 B2 JP4589998 B2 JP 4589998B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- exposure
- reference mark
- mounting table
- exposure substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





























Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7003—Alignment type or strategy, e.g. leveling, global alignment
- G03F9/7007—Alignment other than original with workpiece
- G03F9/7011—Pre-exposure scan; original with original holder alignment; Prealignment, i.e. workpiece with workpiece holder
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7003—Alignment type or strategy, e.g. leveling, global alignment
- G03F9/7007—Alignment other than original with workpiece
- G03F9/7015—Reference, i.e. alignment of original or workpiece with respect to a reference not on the original or workpiece
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7092—Signal processing
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
パターンが形成されたレチクルに露光光を照射して、前記パターンの像を露光基板に投影する投影露光装置であって、
基板が載置される載置台を、少なくとも4つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は露光可能な基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含み、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも4つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも4つのマークからなり、
前記位置決定手段は、
前記載置台を移動させたときに生ずる前記載置台の位置の誤差を補正するための第1の位置補正手段と、
前記露光基板基準マークの位置の誤差のうちの線形成分の誤差を補正するための第2の位置補正手段と、を含み、
前記第1の位置補正手段は、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御手段と、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶手段と、
前記基準基板検出位置の各々において、基準レチクルに露光光を照射して、前記基準レチクルに形成されたレチクル基準マークを前記基準基板に投影して、前記基準基板に前記レチクル基準マークの像を形成する基準基板露光手段と、
前記基準基板に形成された前記レチクル基準マークの像と前記基準基板基準マークとを、前記基準マーク検出手段によって検出し、検出結果に基づいて前記レチクル基準マークの像及び前記基準基板基準マークの相対位置を算出し、前記相対位置と前記載置台の位置とに基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶手段と、を含み、
前記第2の位置補正手段は、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御手段と、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶手段と、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光基板基準マークの位置に基づいて、前記線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算手段と、を含むことを特徴とする。
本発明に係る投影露光装置は、
パターンが形成されたレチクルに露光光を照射して、前記パターンの像を露光基板に投影する投影露光装置であって、
基板が載置される載置台を、少なくとも4つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含み、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも4つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも4つのマークからなり、
前記位置決定手段は、
前記載置台を移動させたときに生ずる前記載置台の位置の誤差を補正するための第1の位置補正手段と、
前記露光基板基準マークの位置の誤差のうちの線形成分の誤差を補正するための第2の位置補正手段と、を含み、
前記第1の位置補正手段は、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御手段と、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶手段と、
前記基準基板検出位置の各々において、前記基準マーク検出手段によって前記基準基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記基準基板基準マークの位置を算出して記憶する基準基板基準マーク位置記憶手段と、
前記基準基板基準マークの位置に基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶手段と、を含み、
前記第2の位置補正手段は、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御手段と、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶手段と、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光基板基準マークの位置に基づいて、前記線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算手段と、を含むことを特徴とする。
複数のミラーを有し、かつ前記複数のミラーに入射した光の反射方向を前記複数のミラー毎に定めることができるデジタルマイクロミラーデバイスと、各々が前記複数のミラーの各々に対応した複数のマイクロレンズを有するマイクロアレイレンズと、を含み、前記マイクロアレイレンズによって形成されるスポットの像を露光基板に投影する投影露光装置であって、
基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は露光可能な基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含み、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記位置決定手段は、
前記載置台を移動させたときに生ずる前記載置台の位置の誤差を補正するための第1の位置補正手段と、
前記露光基板基準マークの位置の誤差のうちの線形成分の誤差を補正するための第2の位置補正手段と、を含み、
前記第1の位置補正手段は、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御手段と、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶手段と、
前記基準基板検出位置の各々において、基準レチクルに露光光を照射して、前記基準レチクルに形成されたレチクル基準マークを前記基準基板に投影して、前記基準基板に前記レチクル基準マークの像を形成する基準基板露光手段と、
前記基準基板に形成された前記レチクル基準マークの像と前記基準基板基準マークとを、前記基準マーク検出手段によって検出し、検出結果に基づいて前記レチクル基準マークの像及び前記基準基板基準マークの相対位置を算出し、前記相対位置と前記載置台の位置とに基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶手段と、を含み、
前記第2の位置補正手段は、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御手段と、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶手段と、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光基板基準マークの位置に基づいて、前記線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算手段と、を含むことを特徴とする。
複数のミラーを有し、かつ前記複数のミラーに入射した光の反射方向を前記複数のミラー毎に定めることができるデジタルマイクロミラーデバイスと、各々が前記複数のミラーの各々に対応した複数のマイクロレンズを有するマイクロアレイレンズと、を含み、前記マイクロアレイレンズによって形成されるスポットの像を露光基板に投影する投影露光装置であって、
基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含み、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記位置決定手段は、
前記載置台を移動させたときに生ずる前記載置台の位置の誤差を補正するための第1の位置補正手段と、
前記露光基板基準マークの位置の誤差のうちの線形成分の誤差を補正するための第2の位置補正手段と、を含み、
前記第1の位置補正手段は、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御手段と、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶手段と、
前記基準基板検出位置の各々において、前記基準マーク検出手段によって前記基準基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記基準基板基準マークの位置を算出して記憶する基準基板基準マーク位置記憶手段と、
前記基準基板基準マークの位置に基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶手段と、を含み、
前記第2の位置補正手段は、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御手段と、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶手段と、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光基板基準マークの位置に基づいて、前記線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算手段と、を含むことを特徴とする。
前記露光光を前記露光基板に照射する投影光学系を含み、
前記基準マーク検出手段は、前記投影光学系と前記載置台との間に配置されたアライメント光学系を含み、
前記アライメント光学系は、前記露光基板基準マーク、又は前記基準基板基準マークに非露光光を照射して、前記露光基板基準マーク、又は前記基準基板基準マークを検出し、
前記アライメント光学系は、
前記露光基板基準マーク、又は前記基準基板基準マークを検出するときには、検出位置に位置づけられ、
前記露光基板基準マーク、又は前記基準基板基準マークの検出を終了したときには、前記検出位置から退避した退避位置に位置づけられる。
前記載置台位置補正データは、複数の基準基板検出位置における前記露光基板基準マークの位置の平均値に基づいて算出される。
前記基準基板基準マークは、前記基準基板において、所定間隔の格子状の交点に位置するように形成され、
前記載置台位置補正データは、前記格子状の交点に位置する前記基準基板基準マークの位置に基づいて演算されたデータであり、
前記露光基板位置制御手段は、前記載置台位置補正データを用いて曲線近似又は補間法により、前記載置台を位置づける目標位置を算出し、前記目標位置に前記載置台を位置づけるように制御する。
前記パターンの像の投影倍率を変更して、前記パターンを前記露光基板に投影できる投影光学系と、
前記線形誤差補正演算手段によって算出された前記線形誤差補正データに基づいて前記投影倍率を定める投影倍率決定手段と、を含む。
パターンが形成されたレチクルに露光光を照射して、前記パターンの像を露光基板に投影する投影露光装置であって、
基板が載置される載置台を、少なくとも4つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含み、
前記露光基板は、前記パターンの像が投影される少なくとも4つの露光領域を有し、
前記露光基板基準マークは、前記少なくとも4つの露光領域の基準位置を示す露光領域基準マークであり、
前記位置決定手段は、前記露光基板基準マークの位置の誤差を補正するための露光位置補正手段を含み、
前記露光位置補正手段は、
前記露光基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも4つ以上の所定の露光基板検出位置に、前記載置台を順次移動させて位置づける露光基板位置制御手段と、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶手段と、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光領域基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光領域基準マークの位置を算出して記憶する露光領域基準マーク位置記憶手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光領域基準マークの位置に基づいて、前記露光基板基準マークの位置の誤差のうちの非線形成分の誤差情報を、最小二乗法を用いて算出する位置誤差処理手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光領域基準マークの位置の差分に基づいて、前記露光基板基準マークの位置の差分の誤差のうち非線形成分の誤差情報を、最小二乗法を用いて算出する差分誤差処理手段と、
前記2つの非線形成分のうち少なくとも1つの誤差情報に基づく重み付けをして、前記載置台を位置づける目標位置を算出し、前記目標位置に前記載置台を位置づける露光基板位置決定手段と、を含むことを特徴とする。
パターンが形成されたレチクルに露光光を照射して、前記パターンの像を露光基板に投影する投影露光装置であって、
基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含み、
前記露光基板は、前記パターンの像が投影される少なくとも3つの露光領域を有し、
前記露光基板基準マークは、前記少なくとも3つの露光領域の基準位置を示す露光領域基準マークであり、
前記位置決定手段は、前記露光基板基準マークの位置の誤差を補正するための露光位置補正手段を含み、
前記露光位置補正手段は、
前記露光基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の露光基板検出位置に、前記載置台を順次移動させて位置づける露光基板位置制御手段と、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶手段と、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光領域基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光領域基準マークの位置を算出して記憶する露光領域基準マーク位置記憶手段と、
前記露光領域基準マーク位置記憶手段に記憶された前記露光領域基準マークの位置に基づいて、線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光領域基準マークの位置の差分を算出する差分算出手段と、
前記最小二乗法によって得られる伸縮、回転及び直交のうちの少なくとも1つを前記差分に置き換えて、前記レチクルに露光光を照射して、前記パターンの像を露光基板に投影する投影像と、前記露光基板との重ね合わせ目標位置を算出し制御する、重ね合わせ制御手段と、を含むことを特徴とする。
基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
露光基板に形成された露光基板基準マーク、又は露光可能な基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含む投影露光装置を用いて、パターンが形成されたレチクルに露光光を照射して、前記載置台に載置された前記露光基板に、前記パターンの像を投影する投影露光方法であって、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御ステップと、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶させる基準基板位置記憶ステップと、
前記基準基板検出位置の各々において、基準レチクルに露光光を照射して、前記基準レチクルに形成されたレチクル基準マークを前記基準基板に投影して、前記基準基板に前記レチクル基準マークの像を形成する基準基板露光ステップと、
前記基準基板に形成された前記レチクル基準マークの像と前記基準基板基準マークとを、前記基準マーク検出手段によって検出し、検出結果に基づいて前記レチクル基準マークの像及び前記基準基板基準マークの相対位置を算出し、前記相対位置と前記載置台の位置とに基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶ステップと、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶ステップと、
前記露光基板基準マーク位置記憶ステップで記憶された前記露光基板基準マークの位置に基づいて、線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算ステップと、を含むことを特徴とする。
基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含む投影露光装置を用いて、パターンが形成されたレチクルに露光光を照射して、前記載置台に載置された前記露光基板に、前記パターンの像を投影する投影露光方法であって、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御ステップと、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶ステップと、
前記基準基板検出位置の各々において、前記基準マーク検出手段によって前記基準基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記基準基板基準マークの位置を算出して記憶する基準基板基準マーク位置記憶ステップと、
前記基準基板基準マークの位置に基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶ステップと、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶ステップと、
前記露光基板基準マーク位置記憶ステップで記憶された前記露光基板基準マークの位置に基づいて、線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算ステップと、を含むことを特徴とする。
基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
露光基板に形成された露光基板基準マーク、又は露光可能な基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、
複数のミラーを有し、かつ前記複数のミラーに入射した光の反射方向を前記複数のミラー毎に定めることができるデジタルマイクロミラーデバイスと、
各々が前記複数のミラーの各々に対応した複数のマイクロレンズを有するマイクロアレイレンズと、を含む投影露光装置を用いて、前記マイクロアレイレンズによって形成されるスポットの像を、前記載置台に載置された前記露光基板に投影する投影露光方法であって、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御ステップと、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶ステップと、
前記基準基板検出位置の各々において、基準レチクルに露光光を照射して、前記基準レチクルに形成されたレチクル基準マークを前記基準基板に投影して、前記基準基板に前記レチクル基準マークの像を形成する基準基板露光ステップと、
前記基準基板に形成された前記レチクル基準マークの像と前記基準基板基準マークとを、前記基準マーク検出手段によって検出し、検出結果に基づいて前記レチクル基準マークの像及び前記基準基板基準マークの相対位置を算出し、前記相対位置と前記載置台の位置とに基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶ステップと、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶ステップと、
前記露光基板基準マーク位置記憶ステップで記憶された前記露光基板基準マークの位置に基づいて、線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算ステップと、を含むことを特徴とする。
基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、
複数のミラーを有し、かつ前記複数のミラーに入射した光の反射方向を前記複数のミラー毎に定めることができるデジタルマイクロミラーデバイスと、
各々が前記複数のミラーの各々に対応した複数のマイクロレンズを有するマイクロアレイレンズと、を含む投影露光装置を用いて、前記マイクロアレイレンズによって形成されるスポットの像を、前記載置台に載置された前記露光基板に投影する投影露光方法であって、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御ステップと、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶ステップと、
前記基準基板検出位置の各々において、前記基準マーク検出手段によって前記基準基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記基準基板基準マークの位置を算出して記憶する基準基板基準マーク位置記憶ステップと、
前記基準基板基準マークの位置に基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶ステップと、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶ステップと、
前記露光基板基準マーク位置記憶ステップで記憶された前記露光基板基準マークの位置に基づいて、線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算ステップと、を含むことを特徴とする。
前記投影露光装置は、前記露光光を前記露光基板に照射する投影光学系を含み、
前記基準マーク検出手段は、前記投影光学系と前記載置台との間に配置され、前記露光基板基準マーク、又は前記基準基板基準マークに非露光光を照射して、前記露光基板基準マーク、又は前記基準基板基準マークを検出するアライメント光学系を含み、
前記基準マーク検出手段によって前記基準基板基準マーク又は前記露光基板基準マークを検出するときに、
前記露光基板基準マーク、又は前記基準基板基準マークを検出するときには、前記アライメント光学系を検出位置に位置づけるステップと、
前記露光基板基準マーク、又は前記基準基板基準マークの検出を終了したときには、前記検出位置から退避した退避位置に前記アライメント光学系を位置づけるステップと、を含む。
前記載置台位置補正データは、複数の基準基板検出位置における前記露光基板基準マークの位置の平均値に基づいて算出される。
前記基準基板基準マークが、前記基準基板において、所定間隔の格子状の交点に位置するように形成され、
前記載置台位置補正データが、前記格子状の交点に位置する前記基準基板基準マークの位置に基づいて演算されたデータであり、
前記載置台位置補正データを用いて曲線近似又は補間法により、前記載置台を位置づける目標位置を算出し、前記目標位置に前記載置台を位置づけるように制御するステップを含む。
前記パターンの像の投影倍率を変更して、前記パターンを前記露光基板に投影できる投影光学系を含み、
前記線形誤差補正演算ステップで算出された前記線形誤差補正データに基づいて前記投影倍率を定めるステップを含む。
基板が載置される載置台を、少なくとも4つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含む投影露光装置を用いて、パターンが形成されたレチクルに露光光を照射して、前記載置台に載置された前記露光基板に、前記パターンの像を投影する投影露光方法であって、
前記露光基板は、前記パターンの像が投影される少なくとも4つの露光領域を有し、
前記露光基板基準マークは、前記少なくとも4つの露光領域の基準位置を示す露光領域基準マークであり、
前記露光基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも4つ以上の所定の露光基板検出位置に、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光領域基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光領域基準マークの位置を算出して記憶する露光領域基準マーク位置記憶ステップと、
前記露光基板基準マーク位置記憶ステップで記憶された前記露光領域基準マークの位置に基づいて、前記露光基板基準マークの位置の誤差のうちの非線形成分の誤差情報を、最小二乗法を用いて算出する位置誤差処理ステップと、
前記露光基板基準マーク位置記憶手段に記憶された前記露光領域基準マークの位置の差分に基づいて、前記露光基板基準マークの位置の差分の誤差のうち非線形成分の誤差情報を、最小二乗法を用いて算出する差分誤差処理ステップと、
前記2つの非線形成分のうち少なくとも1つの誤差情報に基づく重み付けをして、前記載置台を位置づける目標位置を算出し、前記目標位置に前記載置台を位置づける露光基板位置決定ステップと、を含むことを特徴とする。
パターンが形成されたレチクルに露光光を照射して、前記パターンの像を露光基板に投影する投影露光方法であって、 基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含む投影露光装置を用いて、パターンが形成されたレチクルに露光光を照射して、前記載置台に載置された前記露光基板に、前記パターンの像を投影する投影露光方法であって、
前記露光基板は、前記パターンの像が投影される少なくとも3つの露光領域を有し、
前記露光基板基準マークは、前記少なくとも3つの露光領域の基準位置を示す露光領域基準マークであり、
前記露光基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の露光基板検出位置に、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光領域基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光領域基準マークの位置を算出して記憶する露光領域基準マーク位置記憶ステップと、
前記露光領域基準マーク位置記憶手段に記憶された前記露光領域基準マークの位置に基づいて、線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算ステップと、
前記露光基板基準マーク位置記憶ステップで記憶された前記露光領域基準マークの位置の差分を算出する差分算出ステップと、
前記最小二乗法によって得られる伸縮、回転及び直交のうちの少なくとも1つを前記差分に置き換えて、前記レチクルに露光光を照射して、前記パターンの像を露光基板に投影する投影像と、前記露光基板との重ね合わせ目標位置を算出し制御する、重ね合わせ制御ステップと、を含むことを特徴とする。
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含む投影露光装置を用いて、パターンが形成されたレチクルに露光光を照射して、前記載置台に載置された前記露光基板に、前記パターンの像を投影する投影露光方法であって、
前記露光基板は、前記パターンの像が投影される少なくとも9つの露光領域を有し、
前記露光基板は、基板の変形を検出するための少なくとも9つの検出領域を有し、
前記露光基板基準マークは、前記少なくとも9つの露光領域の基準位置を示すと共に前記少なくとも9つの検出領域の基準位置を示し、
前記露光基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも4つ以上の所定の露光基板検出位置に、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光領域基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出する基準マーク位置算出ステップと、
前記露光基板の全体にわたって、前記露光基板基準マークの位置に基づき最小二乗法を用いて、前記露光基板基準マークの位置の変位に基づく誤差を特徴付ける全体領域誤差パラメータ値を算出する全体領域誤差パラメータ値算出ステップと、
前記検出領域の各々において、少なくとも2つの前記露光基板基準マークの位置に基づき前記露光基板基準マークの位置の変位に基づく誤差を特徴付ける検出領域誤差パラメータ値を算出する検出領域誤差パラメータ値算出ステップと、
前記検出領域の各々において、前記検出領域誤差パラメータ値に基づき最小二乗法を用いて前記検出領域誤差パラメータ値の線形成分を算出する検出領域誤差パラメータ値線形成分算出ステップと、
隣り合う二つの前記検出領域における前記検出領域誤差パラメータ値の少なくとも1階以上の差分を算出し、前記差分に基づき最小二乗法を用いて、差分線形成分を算出する差分線形成分算出ステップと、
前記検出領域の各々において、前記検出領域誤差パラメータ値と、前記検出領域誤差パラメータ値の線形成分と、前記差分線形成分の前記差分の階数に基づいた累積和とに基づいて、前記検出領域誤差パラメータ値の誤差情報を算出し、前記検出領域誤差パラメータ値の誤差情報に基づき、前記検出領域誤差パラメータ値の線形成分および前記差分線形成分に基づく誤差と基づかない誤差との大きさの割合を示す重み付け係数を算出する重み付け係数算出ステップと、
前記露光基板基準マークの位置と、前記全体誤差パラメータ値と、前記重み付け係数とに基づいて、前記載置台を位置づける目標位置を算出し、前記目標位置に前記載置台を位置づける露光基板位置決定ステップと、を含むことを特徴とする。
前記検出領域の各々について、前記検出領域誤差パラメータ値の誤差情報が、前記検出領域誤差パラメータ値の線形成分と、前記前記差分線形成分の前記差分の階数に基づいた累積和との和を、前記検出領域誤差パラメータ値から、差し引いた値の標準偏差に基づいて算出され、
前記載置台を位置づける目標位置は、前記検出領域誤差パラメータ値の線形成分および前記差分線形成分の累積和との和と、前記検出領域誤差パラメータ値との間で、前記重み付け係数に基づいて算出される。
図1は、本発明に係る第1の実施の形態の投影露光装置100の概略を示す。投影露光装置100は、主として、プリント配線板を製造するためのものである。
<<投影光学系>>
<光源110>
光源110は、所望する波長の光束を発するものを用いる。例えば、水銀ランプ等の短い波長の紫外線を発するものを用いることができる。光源110のバルブ内には、発光物質である水銀と、陽極(図示せず)と陰極(図示せず)との2つの電極が封入されている。この陰極と陽極とは、対向して配置されている。各電極は金属導体(図示せず)に電気的に接続されており、陰極と陽極との間でアーク放電が形成される。
楕円鏡120は、光源110から発せられた光束を集光する。図1に示すように、楕円鏡120は、反射面122を有し、楕円鏡120は、反射面122の形状を回転楕円面とした反射鏡である。楕円鏡120の底部には、貫通孔126が形成されている。貫通孔126には、光源110の一部が配置される。光源110の一部を貫通孔126に配置することで、光源110のアーク部分が楕円鏡120の第1の焦点に位置するように、光源110を位置づけることができる。
ロッド130は、長尺な直方体状の形状を有する。ロッド130は入射面132と射出面134とを有する。ロッド130の光源像共役面が、光学的に楕円鏡120の第2の焦点に、又は第2の焦点と共役な点に位置するように、ロッド130は配置される。さらに、ロッド130の射出面134が、後述するレチクル142のパターン形成面144と共役な位置となるように、ロッド130は配置される。
導光光学系は、反射ミラー136と、照明リレー光学系138と、反射ミラー140とからなる。ロッド130の射出面134から射出された光束は、反射ミラー136によって、進行方向が変えられ、照明リレー光学系138によって断面の大きさが拡大され、反射ミラー140によって、再び、進行方向が変えられ、後述するレチクル142に入射する。
レチクル142は、プリント配線板を製造するときに、後述する露光基板156(156a,156b又は156c)に導体パターンを形成するために用いられるフォトマスクである。このレチクル142は、光源110から発せられた露光光によって、レチクル142に形成されたパターンを露光基板156に転写して、露光基板156に導体パターンを形成するためのネガに相当する。露光基板156に形成しようとする導体パターンに対応したパターンが、レチクル142のパターン形成面144に形成されている。
レチクル142の上方の近傍には、レチクルブラインド146が配置されている。レチクルブラインド146は、レチクル142に対して平行を保ちつつ移動可能な可動板148を有する。なお、図1に示した例では、レチクル142は、水平に保持されており、レチクルブラインド146の可動板148は、白抜きの矢印で示すように、水平方向に移動できる。レチクルブラインド146は、ロッド130の射出面134から射出された光束の一部を遮り、光束の断面を所望する大きさに変更する。断面が変更された光束は、上述したレチクル142に照射される。
上述したレチクル142の下方には、投影レンズ150が設けられている。投影レンズ150は、入射面152と射出面154とを有し、入射面152が上側に位置し、射出面154が下側に位置するように、支持部材(図示せず)に支持されて設けられている。
アライメント光学系160は、後述する露光基板156(156a,156b又は156c)や、基準基板158(158a又は158b)に形成された基板基準マークを撮影して、基板基準マークの位置を決定するための光学系である。アライメント光学系160は、可動ステージ(図示せず)に載せられて、退避位置と測定位置とに位置づけられる。この退避位置と測定位置とについては、後述する。
図1に示すように、投影レンズ150の下方には、基板載置ステージ170が設けられている。基板載置ステージ170は、X方向移動用ステージ172と、Y方向移動用ステージ174と、Z方向移動用ステージ176と、からなる。なお、図1では、図面の右向きが+X方向を示し、図面の奥行き方向が+Y方向を示し、図面の上方向が、+Z方向を示す。Z方向移動用ステージ176の上面には、露光基板156を水平に載置するためのテーブル177(図示せず)が形成されている。
図2(a)は、X方向移動用ステージ172とY方向移動用ステージ174との詳細を示す正面図であり、図2(b)は、X方向移動用ステージ172の詳細を示す正面図である。なお、図2(a)及び(b)では、図面の右向きが+X方向を示し、図面の上方向が、+Y方向を示す。
図2(b)に示すように、Y方向移動用ステージ174の上部には、リニアモータ固定子190とリニアエンコーダ固定子192とが、設けられている。リニアモータ固定子190とリニアエンコーダ固定子192とは、長尺な形状を有する。リニアモータ固定子190とリニアエンコーダ固定子192とは、互いに平行になるように、かつ、Y方向移動用ステージ174の長手方向に沿うように、Y方向移動用ステージ174に設けられている。Y方向移動用ステージ174には、リニアモータ固定子190とリニアエンコーダ固定子192との間に、長尺な形状のリニアガイド194が設けられている。
図3は、Z方向移動用ステージ176の詳細を示す側面図である。なお、図3では、図面の左向きが+Y方向を示し、図面の奥行き方向が+X方向を示す。図3(a)は、Y方向移動用ステージ174を−Y方向の最端部に位置づけたときのもので、図3(b)は、Y方向移動用ステージ174を+Y方向の最端部に位置づけたときのものである。
上述したように、Z方向移動用ステージ176を傾斜させることによって、露光される露光領域Aを水平に保つことができるが、Z方向移動用ステージ176を傾斜させた場合には、Z方向移動用ステージ176の傾斜の程度に応じて、Z方向移動用ステージ176の水平の基準位置と、露光基板156の表面との間の距離(図3に示したΔZ)が変化する。このため、この距離ΔZに応じて、アッベ誤差が生ずる場合がある。このアッベ誤差が生じた場合には、水平方向の位置の測定誤差が生ずる。
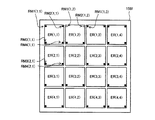
図4は、露光基板156a及び156bの例を示す図である。図4(a)及び図4(b)の各々に示す例では、外側の長方形が、露光基板156aや156bの外形の輪郭を示す線である。また、外側の長方形の内側に示した横方向の4個と縦方向の3個との合計12個の正方形(ER1〜ER12)の各々が、1つの露光領域を示す。この12個の露光領域ER1〜ER12の各々に、レチクル142に形成されたパターンが転写される。なお、12個の露光領域ER1〜ER12の各々の輪郭を示す正方形の線は、露光領域を明示するためのものであり、仮想的な線である。
上述した露光基板156aに形成されている基準マークRM1及びRM2や、露光基板156bに形成されている基準マークRM1〜RM4は、本来、所望する位置に位置するように形成される。しかし、これらの基準マークは、レーザ光で露光基板156の表面を溶融することによって形成されたり、ドリル等によって機械的に加工することで形成されたりする。このような基準マークの形成方法の精度によっては、基準マークは、本来予定していた設計上の位置から変位した位置に形成される場合がある。
上述したように、光源110から発せられた露光光によって、レチクル142に形成されたパターンを露光基板156に転写する。本実施の形態では、露光基板156には複数の露光領域があり、複数の露光領域の各々にレチクル142に形成されたパターンを順次転写するものとする。
X方向移動用ステージ172と、Y方向移動用ステージ174とを、誤差に応じて位置づける方式には、ダイバイダイ方式とグローバル方式とがある。ダイバイダイ方式は、複数の露光領域の各々について、基準マークの位置の誤差を算出し、その誤差に応じてX方向移動用ステージ172とY方向移動用ステージ174との位置を補正して位置づけて、レチクル142に形成されたパターンを露光基板156に転写していくものである。一方、グローバル方式は、露光基板156の全体にわたる誤差を予め算出しておくものである。まず、露光基板156の全体にわたる誤差を算出し、X方向移動用ステージ172とY方向移動用ステージ174とを位置づける位置を、測定した誤差に基づいて補正して、補正した位置を記憶させておく。レチクル142に形成されたパターンを露光基板156に転写するときには、X方向移動用ステージ172とY方向移動用ステージ174とを、補正した位置に位置づけて、順次パターンを露光基板156に転写する。
ダイバイダイ方式は、上述したように、露光基板156の複数の露光領域毎に、基準マークの位置を上述したアライメント光学系160で測定し、その測定結果に応じて基板載置ステージ170の位置を補正して、レチクル142に形成されたパターンを露光基板156に転写する方式である。
なお、以下に説明するダイバイダイ方式による手順の第1の態様〜第3の態様では、上述した前準備を行って、レチクル基準マークの像の位置と、テーブル基準マーク179の位置とを一致させたときのテーブル基準マーク179の位置は、予め記憶されているものとする。
この第1の態様は、上述した露光基板156aの12個の露光領域ER1〜ER12の各々にレチクル142に形成されたパターンを転写するためのものである。上述したように、露光基板156aの12個の露光領域ER1〜ER12の各々には、2つの基準マークRM1及びRM2が形成されている。この第1の態様では、アライメント光学系160を用いて、2つの基準マークRM1及びRM2の位置を決定する。上述したように、このアライメント光学系160は、2つの顕微鏡162a及び162bを含む。顕微鏡162aで、露光基板156aの基準マークRM1を検出し、顕微鏡162bで、露光基板156aの基準マークRM2を検出する。
<ダイバイダイ方式による手順の第2の態様>
この第2の態様は、上述した露光基板156bの12個の露光領域ER1〜ER12の各々にレチクル142に形成されたパターンを転写するものである。上述したように、露光基板156aの12個の露光領域ER1〜ER12の各々には、4つの基準マークRM1〜RM4が形成されている。この第2の態様では、アライメント光学系160を用いて、4つの基準マークRM1〜RM4の位置を決定する。この第2の態様におけるアライメント光学系160は、第1の態様と同様に、2つの顕微鏡162a及び162bを含む。顕微鏡162aで、露光基板156bの基準マークRM1又はRM3を検出し、顕微鏡162bで、露光基板156bの基準マークRM2又はRM4を検出する。アライメント光学系160の構成と機能とは、第1の態様と同様であるので、この第2の態様では、説明を省く。
この第3の態様は、上述した露光基板156bの12個の露光領域ER1〜ER12の各々にレチクル142に形成されたパターンを転写するものである。上述したように、露光基板156aの12個の露光領域ER1〜ER12の各々には、4つの基準マークRM1〜RM4が形成されている。この第3の態様では、2つのアライメント光学系160aと160bとを用いる。顕微鏡162aaで、基準マークRM1を検出し、顕微鏡162abで、基準マークRM2を検出し、顕微鏡162baで、基準マークRM3を検出し、顕微鏡162bbで、基準マークRM4を検出する。アライメント光学系160a及び160bの構成と機能とは、第1の態様や第2の態様のアライメント光学系160と同様であるので、この第3の態様では、説明を省く。
上述したように、グローバル方式は、予め露光基板156の全体にわたる誤差を算出して、X方向移動用ステージ172とY方向移動用ステージ174とを位置づける位置を、測定した誤差に基づいて予め補正し、その補正した位置を記憶させておくことで、レチクル142に形成されたパターンを露光基板156に転写するときには、X方向移動用ステージ172と、Y方向移動用ステージ174とを補正した位置に位置づけて、順次パターンを露光基板156に転写するものである。
図8は、グローバル方式の場合で用いる露光基板156cの例を示す。この図8に示した露光基板156cも、上述した露光基板156a及び156bと同様に、外側の長方形が、露光基板156cの外形の輪郭を示す線である。また、外側の長方形の内側に示した横方向の4個と縦方向の3個との合計12個の正方形(ER1〜ER12)の各々が、1つの露光領域を示す。この12個の露光領域ER1〜ER12の各々に、レチクル142に形成されたパターンが転写される。なお、12個の露光領域ER1〜ER12の各々の輪郭を示す正方形の線は、露光領域を明示するためのものであり、仮想的な線である。
図9は、この露光基板156cを用いたグローバル方式の処理の手順を示すフローチャートである。以下では、この図9のフローチャートを用いて説明する。なお、図9のフローチャートで示した変数nは、上述した4つの露光領域ER1、ER4、ER9及びER12を示す。n=1は、露光領域がER1であることを示し、露光領域ER1を第1番目の測定露光領域と称する。n=2は、露光領域がER4であることを示し、露光領域ER4を第2番目の測定露光領域と称する。n=3は、露光領域がER12であることを示し、露光領域ER12を第3番目の測定露光領域と称する。n=4は、露光領域がER9であることを示し、露光領域ER9を第4番目の測定露光領域と称する。
上述した処理によって得られた、4つの測定露光領域ER1、ER4、ER9及びER12の各々の基準マークRM1の位置(Xmark_1(n),Ymark_1(n))と、基準マークRM2の位置(Xmark_2(n),Ymark_2(n))との位置は、顕微鏡162a及び162bで撮影された画像に固定された座標系における位置である。このため、X方向移動用ステージ172とY方向移動用ステージ174との補正した位置を算出するには、定盤178aと178bに固定された座標系に変換する必要がある。以下では、この座標系の変換について説明する。

この座標変換の処理は、図9の処理手順のステップS18において実行される。
このように座標変換をした上で、式(3)で得られた(XM(n),YM(n))と、式(4)で得られた(XM_D(n),YM_D(n))とを用いて、最小二乗法の2つの式
m=9は、露光領域がER9であることを示す。さらに、m=10は、露光領域がER10であり、m=11は、露光領域がER11であり、m=12は、露光領域がER12であることを示す。なお、以下では、これらのいずれか1つの露光領域を示すときには、第m番目の露光領域と称する。ここで、mは、1〜12のいずれかの値の整数である。
以下では、このグローバル方式で、図8に示した露光基板156cの露光領域ER1〜ER12の各々に、レチクル142に形成されたパターンを転写する手順を、図9のフローチャートを用いて説明する。
上述したグローバル方式は、露光基板に形成された基準マークの位置が、露光基板自体の変形によって、本来の位置から変位したような場合に有効である。しかし、上述したアッベ誤差は、X方向移動用ステージ172や、Y方向移動用ステージ174や、Z方向移動用ステージ176の構造によって生ずるものであり、上述したグローバル方式のみでは、十分に精度を高くして、パターンを露光基板に転写することができない場合もあり得る。このため、基準基板を用いて、X方向移動用ステージ172や、Y方向移動用ステージ174の位置決めの補正をする。
図12(a)は、基準基板158aの概略を示す正面図であり、図12(b)は、基準基板158aの1つの領域に形成された基準マークを示す拡大図である。
図14は、基準基板158aの基準マーク対の位置を決定するための手順を示すフローチャートである。図14のフローチャートで示した変数kは、図13(b)に示した108個の基準マーク対を特定するための変数である。基準マーク対は、基準基板158aの領域ER1〜ER12の全ての基準マーク対RRM1〜RRM9の合計で108つあり、変数kは、1〜108の値をとる。例えば、k=1ならば、領域ER1の基準マーク対RRM1を示し、k=50ならば、領域ER5の基準マークRRM5を示す。
次に、画像に固定された座標系から定盤178aと178bに固定された座標系へ変換するため、上述した式(1)〜式(3)と同様の以下の式(11)〜(13)を用いる。
次に、式(13)で得られた(XM_M(k),YM_M(k))と、式(14)で得られた(XRM_D(k),YRM_D(k))とを用いて、以下の式(15)及び(16)を用いて、最小二乗法により、6つのパラメータSx、Sy、θ、ω、Ox及びOyを算出する(ステップS39)。
図15(a)は、基準基板158bの概略を示す正面図であり、図15(b)は、基準基板158bの1つの領域に形成された基準マークを示す拡大図である。
基準基板158bへ基準パターンを転写する処理を図17に示す。なお、基準基板158bで用いる基準マークの設計上の位置は、予め記憶されているものとする。この基準マークの設計上の位置に基づいて、X方向移動用ステージ172とY方向移動用ステージ174とを移動させることによって、アライメント光学系160で基準マークを撮影することができる。
以下に、基準基板158bの基準マーク対の位置を決定する手順を、図17のフローチャートを用いて説明する。なお、以下では、図16(b)に示すように、IRM1〜IRM9と、対応するパターンORM1〜ORM9とを組み合わせて、基準マークRRM1〜RRM9と称する。例えば、IRM1とORM1とをRRM1とする。また、図17のフローチャートに示した変数jは、上述したように、基準マークを特定するもので、基準マークは、基準基板158bの領域ER1〜ER12の全ての基準マークRRM1〜RRM9の合計で108つあり、変数jは、1〜108の値をとる。例えば、j=1ならば、領域ER1の基準マークRRM1を示し、j=50ならば、領域ER5の基準マークRRM5を示す。
上述したように、グローバル方式により、露光基板156(156a,156b,156c)が変形等することによって生ずる基準マークの誤差を補正することができる。また、基準基板158a又は158bを用いて、マップデータを作成することで、非線形誤差を抽出して、X方向移動用ステージ172とY方向移動用ステージ174との移動の非線形誤差を補正することができる。したがって、レチクル142に形成されたパターンを露光基板156に転写するときには、まず、基準基板158a又は158bを用いて、マップデータを作成する処理を実行する(図18のステップS71)。この処理は、上述した図14又は図17の処理を実行することで行うことができる。
上述した図18の処理を実行することにより、露光基板156(156a,156b,156c)が変形等することによって基準マークの位置に線形誤差が生じている場合でも、X方向移動用ステージ172とY方向移動用ステージ174との位置づけに誤差が生じている場合でも、位置を補正して、レチクル142に形成されたパターンを露光基板156に転写することができる。
上述した処理では、図19の処理をするときに、X方向の差分ΔXM(n)と、Y方向の差分ΔYM(n)とを得て行った。2つの基準マークRM1及びRM2は、X方向に沿って配置されるので、X方向の差分ΔXM(n)は、X方向の伸縮の程度を示すSxに対応し、Y方向の差分ΔYM(n)は、回転の程度を示すθに対応する。
露光基板は、製造する際の熱変形や、所定の大きさにカットする場合などに、2次式や3次式などによって近似できるような形状に変形する場合がある。図24に(a)露光基板の変形が2次式によって近似される場合と、(b)露光基板の変形が3次式によって近似される場合とを例示する。露光基板は、その製造過程において、図24(a)および(a)に示したような変形が生じる場合が少なくない。そのため、露光基板上の基準マークの位置も、2次式、3次式などによって近似できるような位置に変位することとなる。この位置の変位は、基準マークの位置の誤差と捉えることができるので、基準マークの位置の変位に基づく誤差も、2次式、3次式などによって近似できる。一般には、露光基板の形状の変形は、3次式までの次数の式によって近似することができるような位置の誤差を生じる場合が多い。そこで、以下の説明では、露光基板の形状の変形については2次の項を含む3次式で近似できる場合を例に説明する。
図20は、本発明に係る第2の実施の形態の投影露光装置100の概略を示す。投影露光装置200は、投影露光装置100と同様に、主として、プリント配線板を製造するためのものである。
投影光学系は、光源210と、ファイバー212と、ロッド214とを含む。
光源210は、複数の紫外線LED光源(図示せず)を有する。光源210から射出された光束は、ファイバー212に入射され、ファイバー212は、入射された光束を集めて、ファイバー212の射出部から照明光束を射出する。ファイバー212から射出された照明光束は、ロッド214に入射され、ロッド214は、入射された照明光束の照度を均一に近づけ射出する。
ロッド214から射出された光束の進行方向には、照明リレー光学系222と、偏向ミラー224と、デジタルマイクロミラーデバイス230とが配置されている。ロッド214から射出された光束は、照明リレー光学系222と偏向ミラー224とによって、デジタルマイクロミラーデバイス230の反射面232の大きさとなるように調整されて、デジタルマイクロミラーデバイス230を照射する。デジタルマイクロミラーデバイス230の反射面232は、独立に駆動可能な複数のミラーからなる。複数のミラーを駆動することによって、複数のミラーの角度を変えて、複数のミラーに入射した光を所望する方向に反射させることができる。複数のミラーは、2次元に配置されており、例えば、800×600個、1280×1024個、1980×1080個等に配置されている。
デジタルマイクロミラーデバイス230の下方には、拡大照明系240が配置されている。拡大照明系240は、複数のレンズからなる。拡大照明系240における光路には、瞳位置が存在し、瞳位置にはブラインド242が配置されている。ブラインド242には、開口244が形成されている。
マイクロアレイレンズ250の下方には、投影レンズ150とアライメント光学系160と基板載置ステージ170とが配置されている。投影レンズ150とアライメント光学系160と基板載置ステージ170とは、第1の実施の形態における投影露光装置100と同様の構成及び機能を有し、同一の符号を付して示した。
図22は、X方向に連続するパターンを形成するときの手順を示す図である。図22(a−1)〜図22(a−4)は、露光基板156と光束スポットの像260との位置関係を示す図であり、図22(b−1)〜図22(b−4)は、露光基板156を移動させたことにより、露光された箇所を示す図である。これらの図22(a−1)〜図22(a−4)及び図22(b−1)〜図22(b−4)も、露光基板156に形成される光束スポットの像260のうちの一部と、露光基板156の一部とを示す図である。
次に、露光基板156を−X方向に所定の距離だけ移動させて、その位置で、光束スポットの像260aを露光基板156に形成することで、図22(b−2)に示すように、露光基板156に1つの露光点262bを形成する。なお、−X方向に移動させる所定の距離は、露光基板156に形成される光束スポットの像の大きさや、光束スポットの像の間隔に応じて適宜定めればよい。
図23は、Y方向に連続するパターンを形成するときの手順を示す図である。図23(a−1)〜図23(a−3)は、露光基板156と光束スポットの像260との位置関係を示す図であり、図23(b−1)〜図23(b−3)は、露光基板156を移動させたことにより、露光された箇所を示す図である。これらの図23(a−1)〜図23(a−3)及び図23(b−1)〜図23(b−3)も、露光基板156に形成される光束スポットの像260のうちの一部と、露光基板156の一部とを示す図である。
上述したように、第2の実施の形態における投影露光装置200においても、第1の実施の形態における投影露光装置100と同様の基板載置ステージ170を用いている。このため、X方向移動用ステージ172とY方向移動用ステージ174との移動の誤差は、投影露光装置100と同様に生ずる。また、アッベ誤差も同様に生ずる。
100 投影露光装置
110 光源
142 レチクル
150 投影レンズ
156、156a,156b,156c,156d,156e,156f 露光基板
158a、158b 基準基板
160、160a、160b アライメント光学系
162 画像処理装置
170 基板載置ステージ
172 X方向移動用ステージ
174 Y方向移動用ステージ
176 Z方向移動用ステージ
177 テーブル(載置台)
199 制御装置
200 投影露光装置
210 光源
230 デジタルマイクロミラーデバイス
RM1、RM2、RM3、RM4 基準マーク
ER 露光領域、検出領域
Claims (16)
- パターンが形成されたレチクルに露光光を照射して、前記パターンの像を露光基板に投影する投影露光装置であって、
基板が載置される載置台を、少なくとも4つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は露光可能な基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含み、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも4つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも4つのマークからなり、
前記位置決定手段は、
前記載置台を移動させたときに生ずる前記載置台の位置の誤差を補正するための第1の位置補正手段と、
前記露光基板基準マークの位置の誤差のうちの線形成分の誤差を補正するための第2の位置補正手段と、を含み、
前記第1の位置補正手段は、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御手段と、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶手段と、
前記基準基板検出位置の各々において、基準レチクルに露光光を照射して、前記基準レチクルに形成されたレチクル基準マークを前記基準基板に投影して、前記基準基板に前記レチクル基準マークの像を形成する基準基板露光手段と、
前記基準基板に形成された前記レチクル基準マークの像と前記基準基板基準マークとを、前記基準マーク検出手段によって検出し、検出結果に基づいて前記レチクル基準マークの像及び前記基準基板基準マークの相対位置を算出し、前記相対位置と前記載置台の位置とに基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶手段と、を含み、
前記第2の位置補正手段は、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御手段と、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶手段と、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光基板基準マークの位置に基づいて、前記線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算手段と、を含むことを特徴とする投影露光装置。 - パターンが形成されたレチクルに露光光を照射して、前記パターンの像を露光基板に投影する投影露光装置であって、
基板が載置される載置台を、少なくとも4つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含み、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも4つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも4つのマークからなり、
前記位置決定手段は、
前記載置台を移動させたときに生ずる前記載置台の位置の誤差を補正するための第1の位置補正手段と、
前記露光基板基準マークの位置の誤差のうちの線形成分の誤差を補正するための第2の位置補正手段と、を含み、
前記第1の位置補正手段は、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御手段と、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶手段と、
前記基準基板検出位置の各々において、前記基準マーク検出手段によって前記基準基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記基準基板基準マークの位置を算出して記憶する基準基板基準マーク位置記憶手段と、
前記基準基板基準マークの位置に基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶手段と、を含み、
前記第2の位置補正手段は、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御手段と、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶手段と、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光基板基準マークの位置に基づいて、前記線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算手段と、を含むことを特徴とする投影露光装置。 - 複数のミラーを有し、かつ前記複数のミラーに入射した光の反射方向を前記複数のミラー毎に定めることができるデジタルマイクロミラーデバイスと、各々が前記複数のミラーの各々に対応した複数のマイクロレンズを有するマイクロアレイレンズと、を含み、前記マイクロアレイレンズによって形成されるスポットの像を露光基板に投影する投影露光装置であって、
基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は露光可能な基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含み、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記位置決定手段は、
前記載置台を移動させたときに生ずる前記載置台の位置の誤差を補正するための第1の位置補正手段と、
前記露光基板基準マークの位置の誤差のうちの線形成分の誤差を補正するための第2の位置補正手段と、を含み、
前記第1の位置補正手段は、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御手段と、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶手段と、
前記基準基板検出位置の各々において、基準レチクルに露光光を照射して、前記基準レチクルに形成されたレチクル基準マークを前記基準基板に投影して、前記基準基板に前記レチクル基準マークの像を形成する基準基板露光手段と、
前記基準基板に形成された前記レチクル基準マークの像と前記基準基板基準マークとを、前記基準マーク検出手段によって検出し、検出結果に基づいて前記レチクル基準マークの像及び前記基準基板基準マークの相対位置を算出し、前記相対位置と前記載置台の位置とに基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶手段と、を含み、
前記第2の位置補正手段は、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御手段と、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶手段と、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光基板基準マークの位置に基づいて、前記線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算手段と、を含むことを特徴とする投影露光装置。 - 複数のミラーを有し、かつ前記複数のミラーに入射した光の反射方向を前記複数のミラー毎に定めることができるデジタルマイクロミラーデバイスと、各々が前記複数のミラーの各々に対応した複数のマイクロレンズを有するマイクロアレイレンズと、を含み、前記マイクロアレイレンズによって形成されるスポットの像を露光基板に投影する投影露光装置であって、
基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含み、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記位置決定手段は、
前記載置台を移動させたときに生ずる前記載置台の位置の誤差を補正するための第1の位置補正手段と、
前記露光基板基準マークの位置の誤差のうちの線形成分の誤差を補正するための第2の位置補正手段と、を含み、
前記第1の位置補正手段は、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御手段と、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶手段と、
前記基準基板検出位置の各々において、前記基準マーク検出手段によって前記基準基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記基準基板基準マークの位置を算出して記憶する基準基板基準マーク位置記憶手段と、
前記基準基板基準マークの位置に基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶手段と、を含み、
前記第2の位置補正手段は、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御手段と、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶手段と、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶手段と、
前記露光基板基準マーク位置記憶手段に記憶された前記露光基板基準マークの位置に基づいて、前記線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算手段と、を含むことを特徴とする投影露光装置。 - 前記露光光を前記露光基板に照射する投影光学系を含み、
前記基準マーク検出手段は、前記投影光学系と前記載置台との間に配置されたアライメント光学系を含み、
前記アライメント光学系は、前記露光基板基準マーク、又は前記基準基板基準マークに非露光光を照射して、前記露光基板基準マーク、又は前記基準基板基準マークを検出し、
前記アライメント光学系は、
前記露光基板基準マーク、又は前記基準基板基準マークを検出するときには、検出位置に位置づけられ、
前記露光基板基準マーク、又は前記基準基板基準マークの検出を終了したときには、前記検出位置から退避した退避位置に位置づけられる請求項1〜4のいずれかに記載の投影露光装置。 - 前記載置台位置補正データは、複数の基準基板検出位置における前記露光基板基準マークの位置の平均値に基づいて算出される請求項1〜4のいずれかに記載の投影露光装置。
- 前記基準基板基準マークは、前記基準基板において、所定間隔の格子状の交点に位置するように形成され、
前記載置台位置補正データは、前記格子状の交点に位置する前記基準基板基準マークの位置に基づいて演算されたデータであり、
前記露光基板位置制御手段は、前記載置台位置補正データを用いて曲線近似又は補間法により、前記載置台を位置づける目標位置を算出し、前記目標位置に前記載置台を位置づけるように制御する請求項1〜4のいずれかに記載の投影露光装置。 - 前記パターンの像の投影倍率を変更して、前記パターンを前記露光基板に投影できる投影光学系と、
前記線形誤差補正演算手段によって算出された前記線形誤差補正データに基づいて前記投影倍率を定める投影倍率決定手段と、を含む請求項1又は2に記載の投影露光装置。 - 基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
露光基板に形成された露光基板基準マーク、又は露光可能な基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含む投影露光装置を用いて、パターンが形成されたレチクルに露光光を照射して、前記載置台に載置された前記露光基板に、前記パターンの像を投影する投影露光方法であって、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御ステップと、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶させる基準基板位置記憶ステップと、
前記基準基板検出位置の各々において、基準レチクルに露光光を照射して、前記基準レチクルに形成されたレチクル基準マークを前記基準基板に投影して、前記基準基板に前記レチクル基準マークの像を形成する基準基板露光ステップと、
前記基準基板に形成された前記レチクル基準マークの像と前記基準基板基準マークとを、前記基準マーク検出手段によって検出し、検出結果に基づいて前記レチクル基準マークの像及び前記基準基板基準マークの相対位置を算出し、前記相対位置と前記載置台の位置とに基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶ステップと、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶ステップと、
前記露光基板基準マーク位置記憶ステップで記憶された前記露光基板基準マークの位置に基づいて、線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算ステップと、を含むことを特徴とする投影露光方法。 - 基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、を含む投影露光装置を用いて、パターンが形成されたレチクルに露光光を照射して、前記載置台に載置された前記露光基板に、前記パターンの像を投影する投影露光方法であって、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御ステップと、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶ステップと、
前記基準基板検出位置の各々において、前記基準マーク検出手段によって前記基準基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記基準基板基準マークの位置を算出して記憶する基準基板基準マーク位置記憶ステップと、
前記基準基板基準マークの位置に基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶ステップと、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶ステップと、
前記露光基板基準マーク位置記憶ステップで記憶された前記露光基板基準マークの位置に基づいて、線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算ステップと、を含むことを特徴とする投影露光方法。 - 基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
露光基板に形成された露光基板基準マーク、又は露光可能な基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、
複数のミラーを有し、かつ前記複数のミラーに入射した光の反射方向を前記複数のミラー毎に定めることができるデジタルマイクロミラーデバイスと、
各々が前記複数のミラーの各々に対応した複数のマイクロレンズを有するマイクロアレイレンズと、を含む投影露光装置を用いて、前記マイクロアレイレンズによって形成されるスポットの像を、前記載置台に載置された前記露光基板に投影する投影露光方法であって、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御ステップと、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶ステップと、
前記基準基板検出位置の各々において、基準レチクルに露光光を照射して、前記基準レチクルに形成されたレチクル基準マークを前記基準基板に投影して、前記基準基板に前記レチクル基準マークの像を形成する基準基板露光ステップと、
前記基準基板に形成された前記レチクル基準マークの像と前記基準基板基準マークとを、前記基準マーク検出手段によって検出し、検出結果に基づいて前記レチクル基準マークの像及び前記基準基板基準マークの相対位置を算出し、前記相対位置と前記載置台の位置とに基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶ステップと、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶ステップと、
前記露光基板基準マーク位置記憶ステップで記憶された前記露光基板基準マークの位置に基づいて、線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算ステップと、を含むことを特徴とする投影露光方法。 - 基板が載置される載置台を、少なくとも3つの所定の位置に移動させて位置づける駆動ステージと、
前記駆動ステージに設けられ、かつ、前記載置台の位置を示す位置信号を出力する位置信号出力手段と、
前記露光基板に形成された露光基板基準マーク、又は基準基板に形成された基準基板基準マークを検出する基準マーク検出手段と、
前記位置信号が示す位置に基づいて、前記載置台の位置を決定するための位置決定手段と、
複数のミラーを有し、かつ前記複数のミラーに入射した光の反射方向を前記複数のミラー毎に定めることができるデジタルマイクロミラーデバイスと、
各々が前記複数のミラーの各々に対応した複数のマイクロレンズを有するマイクロアレイレンズと、を含む投影露光装置を用いて、前記マイクロアレイレンズによって形成されるスポットの像を、前記載置台に載置された前記露光基板に投影する投影露光方法であって、
前記露光基板基準マークは、前記露光基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板基準マークは、前記基準基板の基準位置を示すための少なくとも3つのマークからなり、
前記基準基板が前記基板として前記載置台に載置されたときに、前記駆動ステージによって、少なくとも3つ以上の所定の基準基板検出位置に前記載置台を順次移動させて位置づける基準基板位置制御ステップと、
前記基準基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する基準基板位置記憶ステップと、
前記基準基板検出位置の各々において、前記基準マーク検出手段によって前記基準基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記基準基板基準マークの位置を算出して記憶する基準基板基準マーク位置記憶ステップと、
前記基準基板基準マークの位置に基づいて、前記載置台の位置の誤差を補正するための載置台位置補正データを演算し記憶する基準基板位置補正演算記憶ステップと、
前記露光基板が前記基板として前記載置台に載置されたときに、前記載置台位置補正データに基づいて定められた少なくとも3つ以上の所定の露光基板検出位置に、前記駆動ステージによって、前記載置台を順次移動させて位置づける露光基板位置制御ステップと、
前記露光基板検出位置の各々における前記載置台の位置を、前記位置信号から得て記憶する露光基板位置記憶ステップと、
前記露光基板検出位置の各々において、前記基準マーク検出手段によって前記露光基板基準マークを検出して、その検出結果と前記載置台の位置とに基づいて前記露光基板基準マークの位置を算出して記憶する露光基板基準マーク位置記憶ステップと、
前記露光基板基準マーク位置記憶ステップで記憶された前記露光基板基準マークの位置に基づいて、線形成分の誤差を補正するための線形誤差補正データを、最小二乗法を用いて演算する線形誤差補正演算ステップと、を含むことを特徴とする投影露光方法。 - 前記投影露光装置は、前記露光光を前記露光基板に照射する投影光学系を含み、
前記基準マーク検出手段は、前記投影光学系と前記載置台との間に配置され、前記露光基板基準マーク、又は前記基準基板基準マークに非露光光を照射して、前記露光基板基準マーク、又は前記基準基板基準マークを検出するアライメント光学系を含み、
前記基準マーク検出手段によって前記基準基板基準マーク又は前記露光基板基準マークを検出するときに、
前記露光基板基準マーク、又は前記基準基板基準マークを検出するときには、前記アライメント光学系を検出位置に位置づけるステップと、
前記露光基板基準マーク、又は前記基準基板基準マークの検出を終了したときには、前記検出位置から退避した退避位置に前記アライメント光学系を位置づけるステップと、を含む請求項9〜12のいずれかに記載の投影露光方法。 - 前記載置台位置補正データは、複数の基準基板検出位置における前記露光基板基準マークの位置の平均値に基づいて算出される請求項9〜12のいずれかに記載の投影露光方法。
- 前記基準基板基準マークは、前記基準基板において、所定間隔の格子状の交点に位置するように形成され、
前記載置台位置補正データは、前記格子状の交点に位置する前記基準基板基準マークの位置に基づいて演算されたデータであり、
前記載置台位置補正データを用いて曲線近似又は補間法により、前記載置台を位置づける目標位置を算出し、前記目標位置に前記載置台を位置づけるように制御するステップを含む請求項9〜12のいずれかに記載の投影露光方法。 - 前記パターンの像の投影倍率を変更して、前記パターンを前記露光基板に投影できる投影光学系を含み、
前記線形誤差補正演算ステップで算出された前記線形誤差補正データに基づいて前記投影倍率を定めるステップを含む請求項9又は12に記載の投影露光方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006131713 | 2006-05-10 | ||
| JP2006131713 | 2006-05-10 | ||
| PCT/JP2007/059466 WO2007129688A1 (ja) | 2006-05-10 | 2007-05-07 | 投影露光装置及び投影露光方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008119636A Division JP2008209949A (ja) | 2006-05-10 | 2008-05-01 | 投影露光装置及び投影露光方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2007129688A1 JPWO2007129688A1 (ja) | 2009-09-17 |
| JP4589998B2 true JP4589998B2 (ja) | 2010-12-01 |
Family
ID=38667796
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008514490A Active JP4589998B2 (ja) | 2006-05-10 | 2007-05-07 | 投影露光装置及び投影露光方法 |
| JP2008119636A Withdrawn JP2008209949A (ja) | 2006-05-10 | 2008-05-01 | 投影露光装置及び投影露光方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008119636A Withdrawn JP2008209949A (ja) | 2006-05-10 | 2008-05-01 | 投影露光装置及び投影露光方法 |
Country Status (3)
| Country | Link |
|---|---|
| JP (2) | JP4589998B2 (ja) |
| TW (1) | TW200811604A (ja) |
| WO (1) | WO2007129688A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5159501B2 (ja) * | 2008-08-06 | 2013-03-06 | キヤノン株式会社 | 原版データ作成プログラム、原版データ作成方法、原版作成方法、露光方法及びデバイス製造方法 |
| KR20130006919A (ko) * | 2011-06-27 | 2013-01-18 | 삼성전기주식회사 | 노광시스템 및 노광방법 |
| TWI454860B (zh) * | 2012-08-17 | 2014-10-01 | Univ Nat Taipei Technology | 影像對位裝置 |
| JP6185724B2 (ja) * | 2013-02-20 | 2017-08-23 | キヤノン株式会社 | 露光装置および物品の製造方法 |
| JP6271922B2 (ja) | 2013-09-10 | 2018-01-31 | キヤノン株式会社 | 位置を求める方法、露光方法、露光装置、および物品の製造方法 |
| JP6575796B2 (ja) * | 2015-03-31 | 2019-09-18 | 株式会社ニコン | 露光装置、露光方法、フラットパネルディスプレイの製造方法、及びデバイス製造方法 |
| KR101720004B1 (ko) * | 2016-06-16 | 2017-03-27 | 주식회사 디이엔티 | 가공 위치 보정장치 및 그 방법 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2936885B2 (ja) * | 1992-03-31 | 1999-08-23 | キヤノン株式会社 | アライメント方法及びそれを用いた投影露光装置 |
| JP4905617B2 (ja) * | 2001-05-28 | 2012-03-28 | 株式会社ニコン | 露光方法及びデバイス製造方法 |
| JP2004265957A (ja) * | 2003-02-26 | 2004-09-24 | Nikon Corp | 最適位置検出式の検出方法、位置合わせ方法、露光方法、デバイス製造方法及びデバイス |
| JP2005311145A (ja) * | 2004-04-23 | 2005-11-04 | Canon Inc | 露光装置、露光方法、デバイス製造方法、パターン形成装置および位置合わせ方法 |
-
2007
- 2007-05-07 JP JP2008514490A patent/JP4589998B2/ja active Active
- 2007-05-07 WO PCT/JP2007/059466 patent/WO2007129688A1/ja not_active Ceased
- 2007-05-09 TW TW96116441A patent/TW200811604A/zh unknown
-
2008
- 2008-05-01 JP JP2008119636A patent/JP2008209949A/ja not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008209949A (ja) | 2008-09-11 |
| JPWO2007129688A1 (ja) | 2009-09-17 |
| WO2007129688A1 (ja) | 2007-11-15 |
| TW200811604A (en) | 2008-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4589998B2 (ja) | 投影露光装置及び投影露光方法 | |
| CN101790775B (zh) | 无掩模曝光方法 | |
| JP3572430B2 (ja) | 露光方法及びその装置 | |
| KR100875008B1 (ko) | 노광장치 및 디바이스 제조방법 | |
| US7701553B2 (en) | Surface level detection method, exposure apparatus, and device manufacturing method | |
| KR100933596B1 (ko) | 위치 결정 장치 | |
| KR20110123665A (ko) | 노광 장치, 노광 방법 및 디바이스 제조 방법 | |
| US9268240B2 (en) | Exposure apparatus, exposure method, and device fabrication method | |
| TW202028693A (zh) | 測量裝置、測量系統、曝光裝置及測量方法 | |
| KR102078079B1 (ko) | 노광 장치, 노광 방법, 및 물품의 제조 방법 | |
| JP3880155B2 (ja) | 位置決め方法及び位置決め装置 | |
| JP2019008029A (ja) | 露光装置及び物品の製造方法 | |
| US20100296074A1 (en) | Exposure method, and device manufacturing method | |
| KR20090089820A (ko) | 노광 장치 및 디바이스 제조 방법 | |
| KR20090028410A (ko) | 노광 시스템 및 반도체 장치의 제조 방법 | |
| JP6267530B2 (ja) | 露光装置、および物品の製造方法 | |
| JPWO2008139955A1 (ja) | 投影露光方法、アライメント方法及び投影露光装置 | |
| JP2018045147A (ja) | 露光装置及び物品の製造方法 | |
| US10488764B2 (en) | Lithography apparatus, lithography method, and method of manufacturing article | |
| JP2010258085A (ja) | 面位置検出方法 | |
| CN101826454B (zh) | 半导体装置的制造方法 | |
| JP2009010139A (ja) | 露光装置及びデバイス製造方法 | |
| KR100391345B1 (ko) | 노광방법및스테퍼 | |
| JP2012190945A (ja) | 露光装置およびデバイス製造方法 | |
| CN111443577B (zh) | 用于曝光设备的调整装置、方法及曝光设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100330 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100518 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100907 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100910 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4589998 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130917 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |