JP4568348B2 - 農用トラクタ - Google Patents
農用トラクタ Download PDFInfo
- Publication number
- JP4568348B2 JP4568348B2 JP2008128714A JP2008128714A JP4568348B2 JP 4568348 B2 JP4568348 B2 JP 4568348B2 JP 2008128714 A JP2008128714 A JP 2008128714A JP 2008128714 A JP2008128714 A JP 2008128714A JP 4568348 B2 JP4568348 B2 JP 4568348B2
- Authority
- JP
- Japan
- Prior art keywords
- pto
- control signal
- tractor
- implement
- spraying
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Fertilizing (AREA)
- Catching Or Destruction (AREA)
Description
前記散布装置がブームスプレーアであり、前記ブームスプレーアに、貯留した散布剤の圃場への供給を遮断するバルブを備えてあるものである。
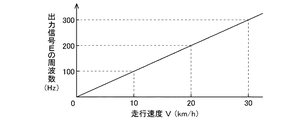
(1)PTOクラッチ入り状態にある場合のインプルメント制御用信号Eを上記のように走行速度Vに正比例した周波数のパルス信号とし、PTOクラッチ切り状態が検出された場合のインプルメント制御用信号Eを、予め設定された作業用速度範囲から高速側に大きく外れた走行速度に相当する周波数のパルス信号とすることもできる。農用トラクタの作業用速度範囲は通常 0.1〜30(km/h)であるので、PTOクラッチ切り時に、例えば図8に示すように、実際に現出しない高速走行速度〔100(km/h)〕に相当する1000Hzのインプルメント制御用信号Eを出力して、インプルメント側でPTOクラッチ切り状態を認識できるようにして、バルブ機構21の閉じ制御に利用することもできる。
5 散布装置(インプルメント)
14 PTO検出センサ
16 主制御装置
21 バルブ機構
22 制御装置
E インプルメント制御用信号
V 走行速度
Claims (2)
- インプルメントとして散布装置を備えると共に、前記散布装置に、貯留した散布剤の圃場への供給を遮断するシャッタ又はバルブを備え、
PTOの入り切り状態を検出するPTO検出センサをトラクタ本機に備えると共に、
トラクタ本機に備えた主制御装置に、トラクタ本機の走行速度を割り出す演算手段と、割り出した走行速度の大きさに対応したインプルメント制御用信号を出力する出力手段と、前記PTO検出センサからの検出に基づいて前記インプルメント制御用信号を補正する出力補正手段とを備え、
前記出力補正手段により補正された前記インプルメント制御用信号に基づいて、前記散布装置に備えた制御装置においてPTOが切り状態であると判別されると、前記制御装置が前記シャッタ又はバルブを閉じ制御するように構成してある農用トラクタ。 - 前記散布装置がブームスプレーアであり、前記ブームスプレーアに、貯留した散布剤の圃場への供給を遮断するバルブを備えてある請求項1記載の農用トラクタ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008128714A JP4568348B2 (ja) | 2008-05-15 | 2008-05-15 | 農用トラクタ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008128714A JP4568348B2 (ja) | 2008-05-15 | 2008-05-15 | 農用トラクタ |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007043821A Division JP4568294B2 (ja) | 2007-02-23 | 2007-02-23 | 農用トラクタ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008220383A JP2008220383A (ja) | 2008-09-25 |
| JP2008220383A5 JP2008220383A5 (ja) | 2009-01-08 |
| JP4568348B2 true JP4568348B2 (ja) | 2010-10-27 |
Family
ID=39839702
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008128714A Active JP4568348B2 (ja) | 2008-05-15 | 2008-05-15 | 農用トラクタ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4568348B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5118076B2 (ja) * | 2009-01-30 | 2013-01-16 | 株式会社クボタ | 作業機のパルス信号出力構造 |
| JP5246514B2 (ja) * | 2009-10-09 | 2013-07-24 | 株式会社タカキタ | 施肥機の肥料落下口の開閉シャッタ装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6291104A (ja) * | 1985-10-17 | 1987-04-25 | 井関農機株式会社 | 対地作業機のロ−リング制御装置 |
| JPS63141513A (ja) * | 1986-12-04 | 1988-06-14 | 株式会社クボタ | 作業機の制御装置 |
| JPH0236907U (ja) * | 1988-08-31 | 1990-03-12 | ||
| JPH06141605A (ja) * | 1992-11-04 | 1994-05-24 | Iseki & Co Ltd | 作業機制御装置 |
| JP2001088632A (ja) * | 1999-08-06 | 2001-04-03 | Robert Bosch Gmbh | 情報の重畳のための信号生成システム |
-
2008
- 2008-05-15 JP JP2008128714A patent/JP4568348B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6291104A (ja) * | 1985-10-17 | 1987-04-25 | 井関農機株式会社 | 対地作業機のロ−リング制御装置 |
| JPS63141513A (ja) * | 1986-12-04 | 1988-06-14 | 株式会社クボタ | 作業機の制御装置 |
| JPH0236907U (ja) * | 1988-08-31 | 1990-03-12 | ||
| JPH06141605A (ja) * | 1992-11-04 | 1994-05-24 | Iseki & Co Ltd | 作業機制御装置 |
| JP2001088632A (ja) * | 1999-08-06 | 2001-04-03 | Robert Bosch Gmbh | 情報の重畳のための信号生成システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008220383A (ja) | 2008-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7150928B2 (ja) | 作業機の制御装置、作業機の制御方法及び作業機 | |
| US8322482B2 (en) | Tractor ground positioning system | |
| US11800828B2 (en) | Working vehicle | |
| WO2021125273A1 (ja) | 作業車両 | |
| US20240151009A1 (en) | Work machine and control method for work machine | |
| JP2020104617A (ja) | 作業車両の制御装置、作業車両、及び作業車両の制御方法 | |
| US9050890B2 (en) | Vehicle positioning system | |
| JP2012060899A (ja) | 自走型防除機 | |
| JP2006271320A (ja) | 農作業車の散布制御装置 | |
| JP2005161221A (ja) | ブームスプレーヤの散布制御装置 | |
| JP4568348B2 (ja) | 農用トラクタ | |
| JP2012196157A (ja) | 散布作業機 | |
| JP4568349B2 (ja) | インプルメントを備えた農用トラクタ | |
| JP4568294B2 (ja) | 農用トラクタ | |
| JP2008220383A5 (ja) | ||
| JP4568268B2 (ja) | 農用トラクタ | |
| JP2008206522A5 (ja) | ||
| JP4568295B2 (ja) | 農用トラクタ | |
| JP4568347B2 (ja) | 農用トラクタ | |
| JP2014144008A (ja) | 農業用作業車両 | |
| JP4568346B2 (ja) | インプルメントを備えた農用トラクタ | |
| JP2008245653A5 (ja) | ||
| US11917933B2 (en) | Working vehicle | |
| JP5508073B2 (ja) | 農業用作業車両 | |
| JP2008237222A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081118 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090820 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091203 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100708 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100806 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4568348 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130813 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130813 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140813 Year of fee payment: 4 |