JP4530358B2 - 柱列式地中連続壁の施工における削孔管理装置 - Google Patents
柱列式地中連続壁の施工における削孔管理装置 Download PDFInfo
- Publication number
- JP4530358B2 JP4530358B2 JP2005101113A JP2005101113A JP4530358B2 JP 4530358 B2 JP4530358 B2 JP 4530358B2 JP 2005101113 A JP2005101113 A JP 2005101113A JP 2005101113 A JP2005101113 A JP 2005101113A JP 4530358 B2 JP4530358 B2 JP 4530358B2
- Authority
- JP
- Japan
- Prior art keywords
- drilling
- depth
- axis
- shaft
- drilling shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Bulkheads Adapted To Foundation Construction (AREA)
Description
<請求項1記載の発明>
柱列式連続壁の施工に際して削孔位置を管理するための装置であって、
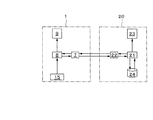
結束バンドにより回転可能に保持され且つ軸相互間隔が保持された多軸削孔機の各軸の、いずれかの削孔軸先端部の平面位置及び深度を深さ方向複数箇所で計測する計測手段を備え、
この計測手段として、基準方向に対する削孔軸の傾斜を検出する傾斜センサと絶対方位検出センサとからなる検出手段、及び、前記結束バンドと対応する位置に固設した近接スイッチ、を前記いずれかの削孔軸先端部の軸内に設け、
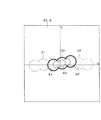
前記結束バンドに被検出体を固設し、前記近接スイッチが前記被検出体に反応する位置に前記いずれかの削孔軸を回転し位置決めした状態で、前記検出手段の傾斜センサの基準軸と前記いずれかの削孔軸以外の削孔軸とが所定の位置関係を有するように構成するとともに、
前記計測した平面位置及び深度を記録する記録手段と、
表示装置と、
計測した削孔軸先端部の現在深度と対応する深度における既削孔の平面位置を前記記録手段から読み出すとともに、この読み出した既削孔の平面位置と、計測した現在の削孔軸先端部の平面位置とを併せて前記表示装置に表示させる処理手段と、
を備えたことを特徴とする柱列式地中連続壁の施工における削孔管理装置。
前記処理手段は、現在の削孔軸の向きと直交する平面座標系を表示平面座標系として前記各位置の表示を行うように構成されている、請求項1記載の柱列式地中連続壁の施工における削孔管理装置。
(イ)本発明は、例えば地中連続壁における先行削孔等にも適用可能である。
Claims (2)
- 柱列式連続壁の施工に際して削孔位置を管理するための装置であって、
結束バンドにより回転可能に保持され且つ軸相互間隔が保持された多軸削孔機の各軸の、いずれかの削孔軸先端部の平面位置及び深度を深さ方向複数箇所で計測する計測手段を備え、
この計測手段として、基準方向に対する削孔軸の傾斜を検出する傾斜センサと絶対方位検出センサとからなる検出手段、及び、前記結束バンドと対応する位置に固設した近接スイッチ、を前記いずれかの削孔軸先端部の軸内に設け、
前記結束バンドに被検出体を固設し、前記近接スイッチが前記被検出体に反応する位置に前記いずれかの削孔軸を回転し位置決めした状態で、前記検出手段の傾斜センサの基準軸と前記いずれかの削孔軸以外の削孔軸とが所定の位置関係を有するように構成するとともに、
前記計測した平面位置及び深度を記録する記録手段と、
表示装置と、
計測した削孔軸先端部の現在深度と対応する深度における既削孔の平面位置を前記記録手段から読み出すとともに、この読み出した既削孔の平面位置と、計測した現在の削孔軸先端部の平面位置とを併せて前記表示装置に表示させる処理手段と、
を備えたことを特徴とする柱列式地中連続壁の施工における削孔管理装置。 - 前記処理手段は、現在の削孔軸の向きと直交する平面座標系を表示平面座標系として前記各位置の表示を行うように構成されている、請求項1記載の柱列式地中連続壁の施工における削孔管理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005101113A JP4530358B2 (ja) | 2005-03-31 | 2005-03-31 | 柱列式地中連続壁の施工における削孔管理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005101113A JP4530358B2 (ja) | 2005-03-31 | 2005-03-31 | 柱列式地中連続壁の施工における削孔管理装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006283289A JP2006283289A (ja) | 2006-10-19 |
| JP2006283289A5 JP2006283289A5 (ja) | 2007-07-12 |
| JP4530358B2 true JP4530358B2 (ja) | 2010-08-25 |
Family
ID=37405488
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005101113A Active JP4530358B2 (ja) | 2005-03-31 | 2005-03-31 | 柱列式地中連続壁の施工における削孔管理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4530358B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140029690A (ko) * | 2012-08-29 | 2014-03-11 | 이석훈 | 심도 경사계 |
| JP5920931B2 (ja) * | 2013-03-25 | 2016-05-18 | 株式会社不動テトラ | 地盤改良工事及び杭基礎工事における施工管理システム |
| JP7040810B2 (ja) * | 2020-01-08 | 2022-03-23 | 株式会社ワイビーエム | 地盤改良機用施工位置誘導システム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS611791A (ja) * | 1984-06-15 | 1986-01-07 | 鹿島建設株式会社 | オ−ガボ−リングによる掘削孔の孔曲がり計測方法 |
| JPH0742147A (ja) * | 1993-08-02 | 1995-02-10 | Takenaka Doboku Co Ltd | ソイル柱列杭のラップ長の施工管理方法 |
| JPH10317870A (ja) * | 1997-05-23 | 1998-12-02 | Raito Kogyo Co Ltd | 単軸掘削装置および多軸掘削装置 |
| JPH11200403A (ja) * | 1998-01-09 | 1999-07-27 | Kajima Corp | ソイルセメント壁施工用掘削機における掘削軸の傾斜管理方法及び掘削軸の位置ズレ修正方法 |
| JP2000160549A (ja) * | 1998-11-27 | 2000-06-13 | Takenaka Doboku Co Ltd | 地盤改良装置及び地盤改良方法並びに改良したソイル柱列杭のラップ長の施工管理方法 |
-
2005
- 2005-03-31 JP JP2005101113A patent/JP4530358B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS611791A (ja) * | 1984-06-15 | 1986-01-07 | 鹿島建設株式会社 | オ−ガボ−リングによる掘削孔の孔曲がり計測方法 |
| JPH0742147A (ja) * | 1993-08-02 | 1995-02-10 | Takenaka Doboku Co Ltd | ソイル柱列杭のラップ長の施工管理方法 |
| JPH10317870A (ja) * | 1997-05-23 | 1998-12-02 | Raito Kogyo Co Ltd | 単軸掘削装置および多軸掘削装置 |
| JPH11200403A (ja) * | 1998-01-09 | 1999-07-27 | Kajima Corp | ソイルセメント壁施工用掘削機における掘削軸の傾斜管理方法及び掘削軸の位置ズレ修正方法 |
| JP2000160549A (ja) * | 1998-11-27 | 2000-06-13 | Takenaka Doboku Co Ltd | 地盤改良装置及び地盤改良方法並びに改良したソイル柱列杭のラップ長の施工管理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006283289A (ja) | 2006-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5383524A (en) | Method and equipment for aligning the feeding beam of a rock drilling equipment | |
| JP2008002202A (ja) | 地中位置検出装置 | |
| NO20130118A1 (no) | System og fremgangsmåte for estimering av retningsegenskaper basert på bøyemomentmålinger | |
| JP7246883B2 (ja) | 地中変位計および地中変位算定方法 | |
| JP5422465B2 (ja) | 出来形管理システム及び出来形管理方法 | |
| CN106441224A (zh) | 一种固定式测斜仪及其使用方法 | |
| JP4530358B2 (ja) | 柱列式地中連続壁の施工における削孔管理装置 | |
| JP2008122271A (ja) | 傾斜計及びそれを用いた計測方法 | |
| JP5468315B2 (ja) | 削孔位置計測方法およびシステム | |
| US20160017670A1 (en) | Apparatus for aligning drilling machines | |
| EP2800870B1 (en) | Navigation device and method for surveying and directing a borehole under drilling conditions | |
| JPH0363387A (ja) | オーガボーリングによる掘削孔の変位量計測方法 | |
| JP4360933B2 (ja) | 地盤削孔装置、地盤削孔における孔曲がり計測方法 | |
| GB2552826A (en) | Handheld tool | |
| JP2005232834A5 (ja) | ||
| JP5309325B2 (ja) | 孔路計測装置 | |
| JPH0989563A (ja) | 地下掘削機の位置検出方法及び装置 | |
| JP5717537B2 (ja) | 削孔ロッドの配置角管理システム及び配置角管理方法 | |
| JP2007155377A (ja) | 孔路計測方法 | |
| JPS62151706A (ja) | トンネル内空の変位計測用検出器およびそれを用いたトンネル内空の変位計測方法 | |
| JP2007205956A (ja) | 内部検査装置 | |
| JP2711331B2 (ja) | 削孔変位計測システム | |
| JP6081772B2 (ja) | 孔曲り測定方法および孔曲り測定装置 | |
| JP3826386B2 (ja) | 削孔装置の削孔位置管理方法 | |
| JPS611791A (ja) | オ−ガボ−リングによる掘削孔の孔曲がり計測方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070525 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070525 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091211 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100604 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100604 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4530358 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130618 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140618 Year of fee payment: 4 |