JP4491479B2 - 分散制御システム - Google Patents
分散制御システム Download PDFInfo
- Publication number
- JP4491479B2 JP4491479B2 JP2007250410A JP2007250410A JP4491479B2 JP 4491479 B2 JP4491479 B2 JP 4491479B2 JP 2007250410 A JP2007250410 A JP 2007250410A JP 2007250410 A JP2007250410 A JP 2007250410A JP 4491479 B2 JP4491479 B2 JP 4491479B2
- Authority
- JP
- Japan
- Prior art keywords
- common processing
- unit
- nodes
- node
- failure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/16—Error detection or correction of the data by redundancy in hardware
- G06F11/18—Error detection or correction of the data by redundancy in hardware using passive fault-masking of the redundant circuits
- G06F11/182—Error detection or correction of the data by redundancy in hardware using passive fault-masking of the redundant circuits based on mutual exchange of the output between redundant processing components
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/0703—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation
- G06F11/0706—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment
- G06F11/0709—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment in a distributed system consisting of a plurality of standalone computer nodes, e.g. clusters, client-server systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L41/00—Arrangements for maintenance, administration or management of data switching networks, e.g. of packet switching networks
- H04L41/06—Management of faults, events, alarms or notifications
- H04L41/0677—Localisation of faults
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/0703—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation
- G06F11/0751—Error or fault detection not based on redundancy
- G06F11/0754—Error or fault detection not based on redundancy by exceeding limits
- G06F11/076—Error or fault detection not based on redundancy by exceeding limits by exceeding a count or rate limit, e.g. word- or bit count limit
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Quality & Reliability (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Small-Scale Networks (AREA)
- Hardware Redundancy (AREA)
Description
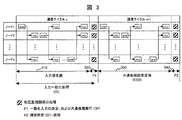
つまり、1つの障害を特定するためには、4つ以上のノードを相互監視に参加させる必要がある。しかし、規模の小さなシステムや、サブシステムだけで稼動する場合には、3ノードで構成される場合もある。そこで、3ノードで構成されるシステムにおいても、障害特定を行うことができる技術についての考察がある(非特許文献1参照)。
2 CPU
3 主メモリ
4 記憶装置
5 I/F
6 ネットワーク
Claims (4)
- 複数ノードがネットワークを介して接続される分散システムにおいて、
前記複数ノードの各々は、
当該複数ノードの各々が持つ一つのパラメータを一致化する入力一致化部と、
前記パラメータを入力とする共通処理を行う共通処理部と、
前記共通処理の結果を、前記ネットワークを介して各々交換する送受信部と、
前記共通処理結果の各々を比較し、当該共通処理結果が一致しない場合に異常があると特定する障害特定部を備え、
前記障害特定部は、前記共通処理結果のうち、一つの値を示す出力数がノード数の半数を超える場合に、当該一つの値以外の値を示す前記共通処理結果を生成したノードについて異常ありと判断し、
前記入力一致化部,前記共通処理部,前記送受信部、及び前記障害特定部が行う各処理は、通信サイクルと同期して実施し、
前記入力一致化部は、通信コントローラであり、前記パラメータは、通信プロトコルの規約上生成され、かつ、前記複数のノード間で共通の時間値であることを特徴とする分散システム。 - 請求項1において、
前記入力一致化部は、ハードウェアであることを特徴とする分散システム。 - 複数ノードがネットワークを介して接続される分散システムにおいて、
前記複数ノードの各々は、
当該複数ノードの各々が持つ一つのパラメータを一致化する入力一致化部と、
前記パラメータを入力とする共通処理を行う共通処理部と、
前記共通処理の結果を、前記ネットワークを介して各々交換する送受信部と、
前記共通処理結果の各々を比較し、当該共通処理結果が一致しない場合に異常があると特定する障害特定部を備え、
前記障害特定部は、前記共通処理結果のうち、一つの値を示す出力数がノード数の半数を超える場合に、当該一つの値以外の値を示す前記共通処理結果を生成したノードについて異常ありと判断し、
前記入力一致化部,前記共通処理部,前記送受信部、及び前記障害特定部が行う各処理は、通信サイクルと同期して実施し、前記共通処理部は、一致化される前のパラメータを入力とし、
前記送受信部は、前記パラメータの一致化のための交換と前記共通処理結果の交換を同一のタイミングで行い、
前記障害特定部は、前記パラメータの一致化と前記共通処理結果の比較を連続して行い、前記共通処理で用いたパラメータと、前記パラメータの一致化により得られたパラメータとが等しい場合のみ、前記共通処理結果の比較を有効とすることを特徴とする分散システム。 - 複数ノードがネットワークを介して接続される分散システムにおいて、
前記複数ノードの各々は、
当該複数ノードの各々が持つ一つのパラメータを一致化する入力一致化部と、
前記パラメータを入力とする共通処理を行う共通処理部と、
前記共通処理の結果を、前記ネットワークを介して各々交換する送受信部と、
前記共通処理結果の各々を比較し、当該共通処理結果が一致しない場合に異常があると特定する障害特定部を備え、
前記障害特定部は、前記共通処理結果のうち、一つの値を示す出力数がノード数の半数を超える場合に、当該一つの値以外の値を示す前記共通処理結果を生成したノードについて異常ありと判断し、
前記入力一致化部,前記共通処理部,前記送受信部、及び前記障害特定部が行う各処理は、通信サイクルと同期して実施し、
前記送受信部は、前記障害特定の結果を前記ネットワークを介して各々交換し、前記障害特定部は、前記障害特定結果の各々を比較し、当該結果が一致しない場合に、当該結果を送信したノードに受信異常があると特定することを特徴とする分散システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007250410A JP4491479B2 (ja) | 2007-09-27 | 2007-09-27 | 分散制御システム |
| US12/194,575 US8041993B2 (en) | 2007-09-27 | 2008-08-20 | Distributed control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007250410A JP4491479B2 (ja) | 2007-09-27 | 2007-09-27 | 分散制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009081750A JP2009081750A (ja) | 2009-04-16 |
| JP4491479B2 true JP4491479B2 (ja) | 2010-06-30 |
Family
ID=40509773
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007250410A Active JP4491479B2 (ja) | 2007-09-27 | 2007-09-27 | 分散制御システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8041993B2 (ja) |
| JP (1) | JP4491479B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2648104B1 (en) * | 2010-11-30 | 2016-04-27 | Japan Science and Technology Agency | Dependability maintenance system for maintaining dependability of a target system in an open environment, corresponding method, computer control program achieving the same and computer readable recording medium recording the same |
| US9167463B2 (en) * | 2011-09-02 | 2015-10-20 | Telcordia Technologies, Inc. | Communication node operable to estimate faults in an ad hoc network and method of performing the same |
| US9201720B2 (en) * | 2012-08-13 | 2015-12-01 | Nxp B.V. | FlexRay network runtime error detection and containment |
| EP3329429A4 (en) * | 2015-07-31 | 2019-04-03 | Cisco Technology, Inc. | QUORUM-BASED DISTRIBUTED ANOMALY AND REPAIR |
| US11038775B2 (en) * | 2018-08-10 | 2021-06-15 | Cisco Technology, Inc. | Machine learning-based client selection and testing in a network assurance system |
| JP6969590B2 (ja) | 2018-09-06 | 2021-11-24 | 株式会社デンソー | 車両制御システム |
| US11465636B2 (en) * | 2021-02-01 | 2022-10-11 | Ree Automotive Ltd. | Control systems for vehicle corner modules and methods of operation |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01288928A (ja) * | 1988-05-16 | 1989-11-21 | Hitachi Ltd | 耐故障コンピュータ・システムおよびその内部回路並びに誤り検出訂正方式 |
| JPH04307633A (ja) * | 1991-04-05 | 1992-10-29 | Hitachi Ltd | 多重化制御装置 |
| JPH0683661A (ja) * | 1992-04-15 | 1994-03-25 | Internatl Business Mach Corp <Ibm> | コンピュータ・システムおよびプロトコル方法 |
| JPH06149605A (ja) * | 1992-11-06 | 1994-05-31 | Nec Corp | フォールトトレラントコンピュータシステム |
| JPH06250869A (ja) * | 1993-03-01 | 1994-09-09 | Hitachi Ltd | 分散制御システム |
| JPH08101817A (ja) * | 1994-09-30 | 1996-04-16 | Fuji Xerox Co Ltd | ワークフロー支援システム |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5285381A (en) * | 1992-09-09 | 1994-02-08 | Vanderbilt University | Multiple control-point control system and method of use |
| JP3390824B2 (ja) * | 1997-03-19 | 2003-03-31 | 株式会社日立製作所 | 多重化制御装置及びその障害回復方法 |
| US5923830A (en) * | 1997-05-07 | 1999-07-13 | General Dynamics Information Systems, Inc. | Non-interrupting power control for fault tolerant computer systems |
| US6199179B1 (en) * | 1998-06-10 | 2001-03-06 | Compaq Computer Corporation | Method and apparatus for failure recovery in a multi-processor computer system |
| WO2000036492A2 (en) * | 1998-12-18 | 2000-06-22 | Triconex Corporation | Method and apparatus for processing control using a multiple redundant processor control system |
| JP4457581B2 (ja) * | 2003-05-28 | 2010-04-28 | 日本電気株式会社 | 耐障害システム、プログラム並列実行方法、耐障害システムの障害検出装置およびプログラム |
| US7525902B2 (en) * | 2003-09-22 | 2009-04-28 | Anilkumar Dominic | Fault tolerant symmetric multi-computing system |
| US7231543B2 (en) * | 2004-01-14 | 2007-06-12 | Hewlett-Packard Development Company, L.P. | Systems and methods for fault-tolerant processing with processor regrouping based on connectivity conditions |
| JP4478037B2 (ja) | 2004-01-30 | 2010-06-09 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| JP2005306124A (ja) | 2004-04-20 | 2005-11-04 | Hitachi Ltd | 車両制御装置 |
| US7630807B2 (en) * | 2004-07-15 | 2009-12-08 | Hitachi, Ltd. | Vehicle control system |
| JP4871687B2 (ja) * | 2005-10-03 | 2012-02-08 | 日立オートモティブシステムズ株式会社 | 車両制御システム |
| DE102005061403A1 (de) * | 2005-12-22 | 2007-06-28 | Robert Bosch Gmbh | Überwachungseinheit zur Überwachung und Steuerung des Zugriffs eines Teilnehmers auf einen Datenbus und Teilnehmer mit einer solchen Überwachungseinheit |
-
2007
- 2007-09-27 JP JP2007250410A patent/JP4491479B2/ja active Active
-
2008
- 2008-08-20 US US12/194,575 patent/US8041993B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01288928A (ja) * | 1988-05-16 | 1989-11-21 | Hitachi Ltd | 耐故障コンピュータ・システムおよびその内部回路並びに誤り検出訂正方式 |
| JPH04307633A (ja) * | 1991-04-05 | 1992-10-29 | Hitachi Ltd | 多重化制御装置 |
| JPH0683661A (ja) * | 1992-04-15 | 1994-03-25 | Internatl Business Mach Corp <Ibm> | コンピュータ・システムおよびプロトコル方法 |
| JPH06149605A (ja) * | 1992-11-06 | 1994-05-31 | Nec Corp | フォールトトレラントコンピュータシステム |
| JPH06250869A (ja) * | 1993-03-01 | 1994-09-09 | Hitachi Ltd | 分散制御システム |
| JPH08101817A (ja) * | 1994-09-30 | 1996-04-16 | Fuji Xerox Co Ltd | ワークフロー支援システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20090089627A1 (en) | 2009-04-02 |
| US8041993B2 (en) | 2011-10-18 |
| JP2009081750A (ja) | 2009-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4491479B2 (ja) | 分散制御システム | |
| JP5319534B2 (ja) | 障害管理方法、および障害管理のための装置 | |
| WO2018221136A1 (ja) | 異常判定装置、異常判定方法及び異常判定プログラム | |
| JP2009009557A (ja) | 分散システム | |
| CN107040439B (zh) | 通信系统以及控制装置 | |
| US20090040934A1 (en) | Distributed System | |
| JP5518810B2 (ja) | 車両制御装置、車両制御システム | |
| CN103678031A (zh) | 二乘二取二冗余系统及方法 | |
| US20150195124A1 (en) | Method for error diagnosis of can communication | |
| JP5822783B2 (ja) | 故障検出装置 | |
| CN107038095B (zh) | 用于冗余地处理数据的方法 | |
| DK2745205T3 (en) | A method of operating a control network and the control network | |
| JP5342395B2 (ja) | 計算機システムおよびその方法 | |
| US20240140448A1 (en) | Electronic Control Device, On-Vehicle Control System, and Redundant Function Control Method | |
| JP2007028118A (ja) | ノード装置の故障判断方法 | |
| JP2009110218A (ja) | 仮想化スイッチおよびそれを用いたコンピュータシステム | |
| KR20190059683A (ko) | 복수의 프로세서 오류 감지 시스템 및 그 방법 | |
| US20230093337A1 (en) | Method and System for Performing Time-Synchronization | |
| JP6278868B2 (ja) | 通信制御装置および計算装置 | |
| JP2014532236A (ja) | 接続方法 | |
| US20100295571A1 (en) | Device and Method for Configuring a Semiconductor Circuit | |
| Seo et al. | A Design of Fail-safe Gateway-embedded System for In-vehicle Networks | |
| KR20140062288A (ko) | 로봇 컴포넌트 오류 처리 장치 및 그 방법 | |
| JP6024604B2 (ja) | 通信装置 | |
| WO2023276350A1 (ja) | 通信装置、通信制御方法、および通信制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090327 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090727 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090908 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100330 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100405 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130409 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4491479 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130409 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130409 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140409 Year of fee payment: 4 |