JP4482795B2 - 画像処理装置、移動物体追跡方法、移動物体追跡プログラム、監視装置及びゲーム装置 - Google Patents
画像処理装置、移動物体追跡方法、移動物体追跡プログラム、監視装置及びゲーム装置 Download PDFInfo
- Publication number
- JP4482795B2 JP4482795B2 JP2004062578A JP2004062578A JP4482795B2 JP 4482795 B2 JP4482795 B2 JP 4482795B2 JP 2004062578 A JP2004062578 A JP 2004062578A JP 2004062578 A JP2004062578 A JP 2004062578A JP 4482795 B2 JP4482795 B2 JP 4482795B2
- Authority
- JP
- Japan
- Prior art keywords
- tracking
- feature point
- occlusion
- value
- moving object
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30241—Trajectory
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Analysis (AREA)
- Closed-Circuit Television Systems (AREA)
Description
(1)ビデオ画像から得られた入力フレーム
(2)追跡領域の位置(本例では領域角位置の座標)
(3)選択される特徴点の総個数Nf
(4)前景検出結果
上記初期処理の結果は、図2に示すように特徴点セレクタ20へ入力される。特徴点セレクタ20はこれら入力に基づき、特徴点リスト(FpsL)31を出力する。特徴点リスト21には、入力フレームにおける追跡領域11内で選択された最大Nf個の特徴点が含まれている。なお、ここで使用する前景検出技術によっては、すべての特徴点が追跡対象の移動物体10上に設定されるとは限らない。
(1)FPsList31:追跡対象となる特徴点のリスト
(2)ToBeSel32:未だ選択されていない特徴点用のリソース枠のリストで、以下に説明する追跡ルーチンの更新処理にて特徴点の割当てが行われる。
(3)Hist33:各特徴点の追跡履歴。特徴点kの追跡履歴Hist(fp_k)は、当該特徴点が特徴点トラッカにより連続的に追跡が成功したフレーム数であり、当該特徴点の信頼度として使用される。
(4)Still34:各特徴点の静止履歴。特徴点kの静止履歴Still(fp_k)は、当該特徴点が静止点として連続的に検出されたフレーム数である。
(5)IsStill35:特徴点が静止しているか否かを示すデータ。IsStill(fp_k)は、特徴点kが静止点として検出された場合に「true」となり、それ以外では「false」を示す。
(6)データ36:
(6−1)nb_SPs: 追跡領域11内における静止点の個数
(6−2)nb_Ps_x: x個以上のフレームに渡って連続的に追跡が成功した特徴点の個数。本実施形態では3フレーム以上、11フレーム以上連続的に追跡することが出来た特徴点の個数nb_FPs_3及びnb_FPs_11を使用する。
(6−3)AMV:現在のフレームにおいて算出された追跡領域11の平均移動ベクトルであり、前のフレームから現在のフレームへの動きを示している。
(6−4)CMV:現在のフレームにおいて算出された追跡領域11の重心移動ベクトルであり、前のフレームから現在のフレームへの動きを示している。
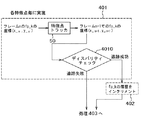
使用されていない特徴点の削除ステップ403では、例えば図6に示すように、各特徴点ごとに様々なチェックが行われ、該当する特徴点をリセットすべきか否かが判定される。すなわち、これらのチェックによって、本追跡ルーチンの最後において、特徴点用のリソース枠のどれに対して新たな特徴点が割り当てられるべきか否かが判定される。本実施形態では、例えば以下のチェックが実施される。
(1)図5のステップ4010で行ったディスパリティチェックの結果を利用して、特徴点kについての追跡が成功したか否かをチェックする(ステップ4031)。
(2)算出された特徴点kの動きが、予め設定した最大移動量を超えているか否かを判断することで、その動きの有効性をチェックする(ステップ4032)。
(3)特徴点kが背景領域に位置しているかをチェックする(ステップ4033)。
(4)複数の特徴点が同じ位置に在るかをチェックする(ステップ4034)。
(1)最短履歴を持つ特徴点を選択(最新の特徴点を優先)
(2)最長履歴を持つ特徴点を選択(最も古い特徴点を優先)
(3)静止履歴が最短の特徴点を選択(後で特徴点を削除)
(4)静止履歴が最長の特徴点を選択(すぐに特徴点を削除)
本実施形態では、静止履歴が3フレームとなった時点で始めて削除の対象となる。このため上記(3)の選択によれば、選択された後でも静止履歴が3フレームとなるまで削除はされない。また、上記(4)では、選択された時点ですでに数フレーム以上となっている可能性が高いため、比較的短期間で削除の対象となる。
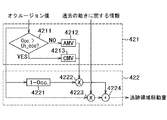
オクルージョンが発生している場合、正しく追跡されてきた特徴点の個数が急激に減少するという現象をより確実に把握するために、本実施形態では、上記連続3フレーム以上にわたって追跡に成功した特徴点の個数nb_FPs_3及び連続11フレーム以上にわたって追跡に成功した特徴点の個数nb_FPs_11のそれぞれについて求められた微分のマイナス部分の値を掛け合わせている(ステップ4124)。
また、nb_FPs_11に対して求められたステップ4122から出力V11は、これまでに追跡されてきた特徴点の総数の25%を最大値として正規化されている。
then
occlusion_measure= occlusion_measure;
else
occlusion_measure= 0.8 x occlusion_measure + 0.2 x previous_occlusion_measure;
previous_occlusion_measure= occlusion_measure;
なお、フィルタ4125を用いてオクルージョン値の減少変化を滑らかにする代わりに、オクルージョンの発生と終了とをそれぞれ検出する手段を設け、これらを検出結果を利用して最終的なオクルージョン値を算出する構成としても良い。
+ Occlusion_Measure x Past_Motion
ここで、パラメータPast_Motionは過去の動きに関する情報を示し、例えば、以下の(i)〜(iv)のような方法で求められる。Applied_MotionはPast_MotionとMotionとの和であり、その加算の割合は上述したようにオクルージョン値に応じて決定される。Applied_Motionは、実際に追跡領域に適用される動きとなる。Motionは現在の動き算出部で求めた動きとなり、本明細書ではAMVとCMVの合成結果となる。なお、上記各パラメータは単位フレーム当たりの動きとなり、実質的には速度を表している。
(i) Past_Motion_n = Motion_(n-1)
(ii) Past_Motion_n = Applied_Motion_(n-1)
(iii) Past_Motion_n = Average(k=1...N, Applied_Motion_(n-k))
(iv) Past_Motion_n = Average(k=1...N, Motion_(n-k))
次に、上記算出されたApplied_Motionに応じて追跡領域を移動する(図4のステップ423)。
(1)複数の特徴点を用い、移動物体上に設定されていないと考えられる特徴点については順次更新していくことで、単なる特徴点単位の追跡ではなく、追跡領域全体に対する追跡が可能となる。
(2)特徴点の更新や静止している特徴点の検出によって、背景の影響や静止している物体への対応が可能となり、追跡精度の向上が可能となる。
(3)特徴点の個数の変化を利用して、オクルージョンの発生の有無を判断するため、より高い精度でオクルージョンの検出を行うことが可能となる。
(4)オクルージョンの発生を示すオクルージョン値を利用して移動量を算出したり、オクルージョン値に応じて過去の移動量の貢献度を制御するため、オクルージョンが発生している場合でも、ロバストな追跡が可能となる。
Claims (5)
- 画像上に現れる追跡対象となる移動物体を特定し、当該移動物体に対応して設定した追跡領域内での複数の特徴点を選択し、選択した結果の当該複数の特徴点を追跡することにより上記移動物体の動きの追跡を行う画像処理装置において、
上記移動物体の追跡領域を設定する追跡領域設定手段と、
上記追跡対象となる上記追跡領域の全体にわたって2つの特徴点間の距離が予め定めた距離以上となるように特徴点を選択する特徴点選択手段と、
上記特徴点選択手段によって選択した特徴点ごとに追跡を行い、前のフレームの特徴点の座標位置に対して次のフレームでの上記特徴点の座標位置を求める追跡処理手段と、
上記追跡処理手段により求めた上記前のフレームでの特徴点の座標位置と上記次のフレームでの特徴点の座標位置とを比較し、比較した結果の差分が上記特徴点の座標上での移動量が予め定めた最大量を超えていれば追跡は失敗し、上記最大量を超えていなければ追跡は成功したと判断する追跡判断手段と、
上記特徴点ごとに現在のフレームでの座標位置と前のフレームでの座標位置とを比較し、同一又は差が予め定めた閾値以下である場合を上記特徴点が静止点であると判定し、かつ上記静止点が予め定めた値以上であれば静止していると判断する静止点判定手段と、
上記追跡判断手段により連続した所定のフレーム数にわたって追跡に成功した特徴点の個数を算出し、算出した結果の上記特徴点の個数の変化値と、上記静止点の総数を正規化した値とを乗算することにより上記画面上において移動物体と他の物体との重なり具合を示すオクルージョンの判定に用いるオクルージョン値を算出するオクルージョン値算出手段と、
上記オクルージョン値算出手段によって求めたオクルージョン値に基づいて、上記オクルージョン値が予め定めた閾値よりも大きい場合には追跡領域の追跡前と追跡後の重心の移動を示す重心ベクトルを算出し、上記オクルージョン値が予め定めた閾値よりも小さい場合は追跡領域の前のフレームと現在のフレームとの動きの平均を示す平均化ベクトルを算出する動きベクトル算出手段と、
上記オクルージョン値に基づいて算出された上記重心ベクトル及び上記平均化ベクトルと、1から上記オクルージョン値を引いた値とを乗算し、乗算した結果の値と過去の動きとを加算することにより上記追跡領域の移動を示す追跡領域移動量を算出する追跡領域移動量算出手段と
を具える画像処理装置。 - 画像上に現れる追跡対象となる移動物体を特定し、当該移動物体に対応して設定した追跡領域内での複数の特徴点を選択し、選択した結果の当該複数の特徴点を追跡することにより上記移動物体の動きの追跡を行う移動物体追跡方法において、
追跡領域設定手段により、上記移動物体の追跡領域を設定する追跡領域設定ステップと、
特徴点選択手段により、上記追跡対象となる上記追跡領域の全体にわたって2つの特徴点間の距離が予め定めた距離以上となるように特徴点を選択する特徴点選択ステップと、
追跡処理手段により、上記特徴点選択手段によって選択した特徴点ごとに追跡を行い、前のフレームの特徴点の座標位置に対して次のフレームでの上記特徴点の座標位置を求める追跡処理ステップと、
追跡判断手段により、上記追跡処理手段により求めた上記前のフレームでの特徴点の座標位置と上記次のフレームでの特徴点の座標位置とを比較し、比較した結果の差分が上記特徴点の座標上での移動量が予め定めた最大量を超えていれば追跡は失敗し、上記最大量を超えていなければ追跡は成功したと判断する追跡判断ステップと、
静止点判定手段により、静止点判定手段により、上記特徴点ごとに現在のフレームでの座標位置と前のフレームでの座標位置とを比較し、同一又は差が予め定めた閾値以下である場合を上記特徴点が静止点であると判定し、かつ上記静止点が予め定めた値以上であれば静止していると判定する静止点判定ステップと、
オクルージョン値算出手段により、上記追跡判断手段により連続した所定のフレーム数にわたって追跡に成功した特徴点の個数を算出し、算出した結果の上記特徴点の個数の変化値と、上記静止点の総数を正規化した値とを乗算することにより上記画面上において移動物体と他の物体との重なり具合を示すオクルージョンの判定となるオクルージョン値を算出するオクルージョン値算出ステップと、
動きベクトル算出手段により、上記オクルージョン値算出手段によって求めたオクルージョン値に基づいて、上記オクルージョン値が予め定めた閾値よりも大きい場合には追跡領域の追跡前と追跡後の重心の移動を示す重心ベクトルを算出し、上記オクルージョン値が予め定めた閾値よりも小さい場合は追跡領域の前のフレームと現在のフレームとの動きの平均を示す平均化ベクトルを算出する動きベクトル算出ステップと、
追跡領域移動量算出手段により、上記オクルージョン値に基づいて算出された上記重心ベクトル及び上記平均化ベクトルと1から上記オクルージョン値を引いた値とを乗算し、乗算した結果の値と過去の動きとを加算することにより上記追跡領域の移動を示す追跡領域移動量を算出する追跡領域移動量算出ステップと
を有する移動物体追跡方法。 - 画像上に現れる追跡対象となる移動物体を特定し、当該移動物体に対応して設定した追跡領域内での複数の特徴点を選択し、選択した結果の当該複数の特徴点を追跡することにより上記移動物体の動きの追跡を行う移動物体追跡方法をコンピュータに実行させる移動物体追跡プログラムにおいて、
移動物体追跡方法では、
追跡領域設定手段により、上記移動物体の追跡領域を設定する追跡領域設定ステップと、
特徴点選択手段により、上記追跡対象となる上記追跡領域の全体にわたって2つの特徴点間の距離が予め定めた距離以上となるように特徴点を選択する特徴点選択ステップと、
追跡処理手段により、上記特徴点選択手段によって選択した特徴点ごとに追跡を行い、前のフレームの特徴点の座標位置に対して次のフレームでの上記特徴点の座標位置を求める追跡処理ステップと、
追跡判断手段により、上記追跡手段により求めた上記前のフレームでの特徴点の座標位置と上記次のフレームでの特徴点の座標位置とを比較し、比較した結果の差分が上記特徴点の座標上での移動量が予め定めた最大量を超えていれば追跡は失敗し、上記最大量を超えていなければ追跡は成功したと判断する追跡判断ステップと、
静止点判定手段により、上記特徴点ごとに現在のフレームでの座標位置と前のフレームでの座標位置とを比較し、同一又は差が予め定めた閾値以下である場合を上記特徴点が静止点であると判定する静止点判定ステップと、
オクルージョン値算出手段により、上記追跡判断手段により連続した所定のフレーム数にわたって追跡に成功した特徴点の個数を算出し、算出した結果の上記特徴点の個数の変化値と、上記静止点の総数を正規化した値とを乗算することにより上記画面上において移動物体と他の物体との重なり具合を示すオクルージョンの判定となるオクルージョン値を算出するオクルージョン値算出ステップと、
動きベクトル算出手段により、上記オクルージョン値算出手段によって求めたオクルージョン値に基づいて、上記オクルージョン値が予め定めた閾値よりも大きい場合には追跡領域の追跡前と追跡後の重心の移動を示す重心ベクトルを算出し、上記オクルージョン値が予め定めた閾値よりも小さい場合は追跡領域の前のフレームと現在のフレームとの動きの平均を示す平均化ベクトルを算出する動きベクトル算出ステップと、
追跡領域移動量算出手段により、上記オクルージョン値に基づいて算出された上記重心ベクトル及び上記平均化ベクトルと1から上記オクルージョン値を引いた値とを乗算し、乗算した結果の値と過去の動きとを加算することにより上記追跡領域の移動を示す追跡領域移動量を算出する追跡領域移動量算出ステップと
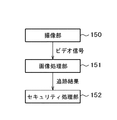
を有する移動物体追跡プログラム。 - 撮像手段が出力する映像信号を受信して、該映像信号が示す画像上に現れる追跡対象となる移動物体を特定し、当該移動物体に対応して設定した追跡領域内での複数の特徴点を選択し、選択した結果の当該複数の特徴点を追跡することにより上記移動物体の動きの追跡を行う画像処理部と、当該画像処理部が出力する追跡結果を利用して監視を行うセキュリティ処理部とを具える監視装置において、
画像処理部は、
上記移動物体の追跡領域を設定する追跡領域設定手段と、
上記追跡対象となる上記追跡領域の全体にわたって2つの特徴点間の距離が予め定めた距離以上となるように特徴点を選択する特徴点選択手段(特徴点セレクタ)と、
上記特徴点選択手段によって選択した特徴点ごとに追跡を行い、前のフレームの特徴点の座標位置に対して次のフレームでの上記特徴点の座標位置を求める追跡処理手段と、
上記追跡処理手段により求めた上記前のフレームでの特徴点の座標位置と上記次のフレームでの特徴点の座標位置とを比較し、比較した結果の差分が上記特徴点の座標上での移動量が予め定めた最大量を超えていれば追跡は失敗し、上記最大量を超えていなければ追跡は成功したと判断する追跡判断手段と、
上記特徴点ごとに現在のフレームでの座標位置と前のフレームでの座標位置とを比較し、同一又は差が予め定めた閾値以下である場合を上記特徴点が静止点であると判定し、かつ上記静止点が予め定めた値以上であれば静止していると判断する静止点判定手段と、
上記追跡判断手段により連続した所定のフレーム数にわたって追跡に成功した特徴点の個数を算出し、算出した結果の上記特徴点の個数の変化値と、上記静止点の総数を正規化した値とを乗算することにより上記画面上において移動物体と他の物体との重なり具合を示すオクルージョンの判定となるオクルージョン値を算出するオクルージョン値算出手段と、
上記オクルージョン値算出手段によって求めたオクルージョン値に基づいて、上記オクルージョン値が予め定めた閾値よりも大きい場合には追跡領域の追跡前と追跡後の重心の移動を示す重心ベクトルを算出し、上記オクルージョン値が予め定めた閾値よりも小さい場合は追跡領域の前のフレームと現在のフレームとの動きの平均を示す平均化ベクトルを算出する動きベクトル算出手段と、
上記オクルージョン値に基づいて算出された上記重心ベクトル及び上記平均化ベクトルと1から上記オクルージョン値を引いた値とを乗算し、乗算した結果の値と過去の動きとを加算することにより上記追跡領域の移動を示す追跡領域移動量を算出する追跡領域移動量算出手段と
を具える監視装置。 - 入力された映像信号が示す画像上に現れる追跡対象となる移動物体を特定し、当該移動物体に対応して設定した追跡領域内での複数の特徴点を選択し、選択した結果の当該複数の特徴点を追跡することにより上記移動物体の動きの追跡を行う画像処理部と、ユーザの操作を受け付けるユーザ操作部と、該画像処理部が出力する追跡結果及び該ユーザ操作部からの操作信号に基づいてゲームを行うゲーム処理部とを具えるゲーム装置において、
画像処理部は、
上記移動物体の追跡領域を設定する追跡領域設定手段と、
上記追跡対象となる上記追跡領域の全体にわたって2つの特徴点間の距離が予め定めた距離以上となるように特徴点を選択する特徴点選択手段と、
上記特徴点選択手段によって選択した特徴点ごとに追跡を行い、前のフレームの特徴点の座標位置に対して次のフレームでの上記特徴点の座標位置を求める追跡処理手段と、
上記追跡処理手段により求めた上記前のフレームでの特徴点の座標位置と上記次のフレームでの特徴点の座標位置とを比較し、比較した結果の差分が上記特徴点の座標上での移動量が予め定めた最大量を超えていれば追跡は失敗し、上記最大量を超えていなければ追跡は成功したと判断する追跡判断手段と、
上記特徴点ごとに現在のフレームでの座標位置と前のフレームでの座標位置とを比較し、同一又は差が予め定めた閾値以下である場合を上記特徴点が静止点であると判定し、かつ上記静止点が予め定めた値以上であれば静止していると判断する静止点判定手段と、
上記追跡判断手段により連続した所定のフレーム数にわたって追跡に成功した特徴点の個数を算出し、算出した結果の上記特徴点の個数の変化値と、上記静止点の総数を正規化した値とを乗算することにより上記画面上において移動物体と他の物体との重なり具合を示すオクルージョンの判定となるオクルージョン値を算出するオクルージョン値算出手段と、
上記オクルージョン値算出手段によって求めたオクルージョン値に基づいて、上記オクルージョン値が予め定めた閾値よりも大きい場合には追跡領域の追跡前と追跡後の重心の移動を示す重心ベクトルを算出し、上記オクルージョン値が予め定めた閾値よりも小さい場合は追跡領域の前のフレームと現在のフレームとの動きの平均を示す平均化ベクトルを算出する動きベクトル算出手段と、
上記オクルージョン値に基づいて算出された上記重心ベクトル及び上記平均化ベクトルと1から上記オクルージョン値を引いた値とを乗算し、乗算した結果の値と過去の動きとを加算することにより上記追跡領域の移動を示す追跡領域移動量を算出する追跡領域移動量算出手段と
を具えるゲーム装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004062578A JP4482795B2 (ja) | 2004-03-05 | 2004-03-05 | 画像処理装置、移動物体追跡方法、移動物体追跡プログラム、監視装置及びゲーム装置 |
| US11/055,979 US7613321B2 (en) | 2004-03-05 | 2005-02-14 | Moving object tracking method using occlusion detection of the tracked object, and image processing apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004062578A JP4482795B2 (ja) | 2004-03-05 | 2004-03-05 | 画像処理装置、移動物体追跡方法、移動物体追跡プログラム、監視装置及びゲーム装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005250989A JP2005250989A (ja) | 2005-09-15 |
| JP2005250989A5 JP2005250989A5 (ja) | 2007-03-15 |
| JP4482795B2 true JP4482795B2 (ja) | 2010-06-16 |
Family
ID=34909276
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004062578A Expired - Fee Related JP4482795B2 (ja) | 2004-03-05 | 2004-03-05 | 画像処理装置、移動物体追跡方法、移動物体追跡プログラム、監視装置及びゲーム装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7613321B2 (ja) |
| JP (1) | JP4482795B2 (ja) |
Families Citing this family (55)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060204036A1 (en) * | 2005-03-09 | 2006-09-14 | Dean Huang | Method for intelligent video processing |
| AU2006244201B2 (en) * | 2005-05-09 | 2012-09-06 | Lockheed Martin Corporation | Continuous extended range image processing |
| JP4418400B2 (ja) * | 2005-05-20 | 2010-02-17 | オリンパスメディカルシステムズ株式会社 | 画像表示装置 |
| JP4947936B2 (ja) * | 2005-08-11 | 2012-06-06 | ソニー株式会社 | モニタリングシステムおよび管理装置 |
| JP4826315B2 (ja) * | 2006-03-31 | 2011-11-30 | ソニー株式会社 | 画像処理装置および方法、並びにプログラム |
| JP4961850B2 (ja) * | 2006-06-15 | 2012-06-27 | ソニー株式会社 | 動き検出方法、動き検出方法のプログラム、動き検出方法のプログラムを記録した記録媒体及び動き検出装置 |
| KR20080073933A (ko) * | 2007-02-07 | 2008-08-12 | 삼성전자주식회사 | 객체 트래킹 방법 및 장치, 그리고 객체 포즈 정보 산출방법 및 장치 |
| JP4775277B2 (ja) * | 2007-02-07 | 2011-09-21 | 株式会社デンソー | 画像処理装置及び画像処理方法 |
| US20100157056A1 (en) * | 2007-05-20 | 2010-06-24 | Rafael Advanced Defense Systems Ltd. | Tracking and imaging data fusion |
| US20090002489A1 (en) * | 2007-06-29 | 2009-01-01 | Fuji Xerox Co., Ltd. | Efficient tracking multiple objects through occlusion |
| JP2009053815A (ja) * | 2007-08-24 | 2009-03-12 | Nikon Corp | 被写体追跡プログラム、および被写体追跡装置 |
| US8218811B2 (en) | 2007-09-28 | 2012-07-10 | Uti Limited Partnership | Method and system for video interaction based on motion swarms |
| US8384780B1 (en) * | 2007-11-28 | 2013-02-26 | Flir Systems, Inc. | Infrared camera systems and methods for maritime applications |
| US8170280B2 (en) * | 2007-12-03 | 2012-05-01 | Digital Smiths, Inc. | Integrated systems and methods for video-based object modeling, recognition, and tracking |
| JP4513039B2 (ja) * | 2008-05-30 | 2010-07-28 | ソニー株式会社 | 画像処理装置および画像処理方法、並びにプログラム |
| JP5172482B2 (ja) * | 2008-06-06 | 2013-03-27 | 本田技研工業株式会社 | 車両周辺監視装置 |
| KR101498124B1 (ko) * | 2008-10-23 | 2015-03-05 | 삼성전자주식회사 | 움직임 궤적을 이용한 프레임률 향상 장치 및 방법 |
| JP5210843B2 (ja) * | 2008-12-12 | 2013-06-12 | パナソニック株式会社 | 撮像装置 |
| US8812226B2 (en) * | 2009-01-26 | 2014-08-19 | GM Global Technology Operations LLC | Multiobject fusion module for collision preparation system |
| EP2391984A1 (en) * | 2009-01-28 | 2011-12-07 | BAE Systems PLC | Detecting potential changed objects in images |
| TWI391876B (zh) * | 2009-02-16 | 2013-04-01 | Inst Information Industry | 利用多重模組混合圖形切割之前景偵測方法、系統以及電腦程式產品 |
| US8364442B2 (en) * | 2009-02-17 | 2013-01-29 | Schlumberger Technology Corporation | Automated structural interpretation |
| CN102349096B (zh) * | 2009-03-09 | 2014-04-02 | 松下电器产业株式会社 | 出入检测装置、监视装置以及出入检测方法 |
| JP5205337B2 (ja) * | 2009-06-18 | 2013-06-05 | 富士フイルム株式会社 | ターゲット追跡装置および画像追跡装置ならびにそれらの動作制御方法ならびにディジタル・カメラ |
| US8462987B2 (en) * | 2009-06-23 | 2013-06-11 | Ut-Battelle, Llc | Detecting multiple moving objects in crowded environments with coherent motion regions |
| JP5269707B2 (ja) * | 2009-07-01 | 2013-08-21 | 富士フイルム株式会社 | 画像合成装置及び方法 |
| KR101266362B1 (ko) * | 2009-10-22 | 2013-05-23 | 한국전자통신연구원 | 카메라 트래킹 시스템, 트래킹 방법 및 이를 이용한 실사영상 합성 시스템 |
| JP5644097B2 (ja) * | 2009-12-08 | 2014-12-24 | ソニー株式会社 | 画像処理装置、画像処理方法及びプログラム |
| KR101671488B1 (ko) * | 2009-12-18 | 2016-11-01 | 에스케이텔레콤 주식회사 | 문맥상 사라진 특징점의 복원을 통한 물체 인식 방법 |
| WO2011151999A1 (ja) | 2010-05-31 | 2011-12-08 | 日本電気株式会社 | 動線検出システム、動線検出方法および動線検出プログラム |
| JP2012234258A (ja) * | 2011-04-28 | 2012-11-29 | Sony Corp | 画像処理装置と画像処理方法およびプログラム |
| US9183638B2 (en) * | 2011-08-09 | 2015-11-10 | The Boeing Company | Image based position determination |
| GB2503481B (en) * | 2012-06-28 | 2017-06-07 | Bae Systems Plc | Surveillance process and apparatus |
| CN103258188A (zh) * | 2013-04-19 | 2013-08-21 | 上海应用技术学院 | 基于跨平台计算机视觉库的移动目标物体检测跟踪方法 |
| JP5935779B2 (ja) * | 2013-09-30 | 2016-06-15 | カシオ計算機株式会社 | 画像処理装置、画像処理方法及びプログラム |
| JP6547292B2 (ja) | 2014-02-05 | 2019-07-24 | 株式会社リコー | 画像処理装置、機器制御システム、および画像処理プログラム |
| JP6525545B2 (ja) * | 2014-10-22 | 2019-06-05 | キヤノン株式会社 | 情報処理装置、情報処理方法及びコンピュータプログラム |
| US9449230B2 (en) * | 2014-11-26 | 2016-09-20 | Zepp Labs, Inc. | Fast object tracking framework for sports video recognition |
| KR102464781B1 (ko) * | 2015-06-25 | 2022-11-07 | 에스케이 텔레콤주식회사 | 영상의 차이를 이용하여 이동 개체를 검출하는 방법 및 장치 |
| JP6627450B2 (ja) * | 2015-11-20 | 2020-01-08 | カシオ計算機株式会社 | 特徴点追跡装置、特徴点追跡方法及びプログラム |
| CN105954536B (zh) * | 2016-06-29 | 2019-02-22 | 英华达(上海)科技有限公司 | 一种光流测速模块与测速方法 |
| JP6841097B2 (ja) * | 2017-03-09 | 2021-03-10 | 富士通株式会社 | 動き量算出プログラム、動き量算出方法、動き量算出装置及び業務支援システム |
| JP6894725B2 (ja) * | 2017-03-09 | 2021-06-30 | キヤノン株式会社 | 画像処理装置及びその制御方法、プログラム、記憶媒体 |
| EP3635946A1 (en) | 2017-06-05 | 2020-04-15 | SONY Corporation | Object-tracking based slow-motion video capture |
| KR101858582B1 (ko) * | 2017-10-11 | 2018-05-16 | 엘아이지넥스원 주식회사 | W대역 밀리미터파 탐색기 및 영상 탐색기를 이용한 다중 표적 추적 장치 |
| KR101858583B1 (ko) * | 2017-10-11 | 2018-05-16 | 엘아이지넥스원 주식회사 | 밀리미터파 탐색기 및 iir 영상 탐색기를 이용한 다중 표적 추적 방법 및 기록매체에 저장된 컴퓨터 프로그램 |
| KR101857132B1 (ko) * | 2017-10-24 | 2018-05-11 | 엘아이지넥스원 주식회사 | W대역 밀리미터파 탐색기 및 영상 탐색기를 이용한 레이더 반사 면적 예측 기반 표적 탐지 장치 |
| KR101857133B1 (ko) * | 2017-10-24 | 2018-05-11 | 엘아이지넥스원 주식회사 | Iir 영상 탐색기 및 w대역 밀리미터파 탐색기를 이용한 rcs 예측 기반 표적 탐지 방법 및 기록매체에 저장된 컴퓨터 프로그램 |
| JP7009252B2 (ja) * | 2018-02-20 | 2022-01-25 | キヤノン株式会社 | 画像処理装置、画像処理方法およびプログラム |
| US10855918B2 (en) * | 2018-05-09 | 2020-12-01 | Canon Kabushiki Kaisha | Image processing device, image processing method, image pickup apparatus, and program storage medium that calculates a matching degree between an estimated target of interest and tracked feature points, then selects a feature point to which tracking is continued according to the matching degree |
| JP2020135177A (ja) * | 2019-02-15 | 2020-08-31 | 株式会社 ディー・エヌ・エー | 動画を解析するためのプログラム、装置、及び方法 |
| CN109934851A (zh) * | 2019-03-28 | 2019-06-25 | 新华三技术有限公司 | 一种标注方法、装置及机器可读存储介质 |
| CN110414514B (zh) * | 2019-07-31 | 2021-12-07 | 北京字节跳动网络技术有限公司 | 图像处理方法及装置 |
| CN112546620B (zh) * | 2019-09-26 | 2024-11-26 | 伊姆西Ip控股有限责任公司 | 游戏控制的方法、设备和计算机程序产品 |
| CN114210059A (zh) * | 2021-12-08 | 2022-03-22 | 惠州Tcl移动通信有限公司 | 基于游戏的运动目标突出显示方法、装置、终端及介质 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR19980702922A (ko) * | 1995-03-22 | 1998-09-05 | 마누엘쿠베로 | 깊이 모델링 및 이동 물체의 깊이 정보 제공방법 및 장치 |
| EP0907145A3 (en) * | 1997-10-03 | 2003-03-26 | Nippon Telegraph and Telephone Corporation | Method and equipment for extracting image features from image sequence |
| US6771303B2 (en) * | 2002-04-23 | 2004-08-03 | Microsoft Corporation | Video-teleconferencing system with eye-gaze correction |
| US7194110B2 (en) * | 2002-12-18 | 2007-03-20 | Intel Corporation | Method and apparatus for tracking features in a video sequence |
| US20040219980A1 (en) * | 2003-04-30 | 2004-11-04 | Nintendo Co., Ltd. | Method and apparatus for dynamically controlling camera parameters based on game play events |
-
2004
- 2004-03-05 JP JP2004062578A patent/JP4482795B2/ja not_active Expired - Fee Related
-
2005
- 2005-02-14 US US11/055,979 patent/US7613321B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005250989A (ja) | 2005-09-15 |
| US7613321B2 (en) | 2009-11-03 |
| US20050196017A1 (en) | 2005-09-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4482795B2 (ja) | 画像処理装置、移動物体追跡方法、移動物体追跡プログラム、監視装置及びゲーム装置 | |
| JP4991595B2 (ja) | パーティクルフィルタを使用する追跡システム | |
| US12207019B2 (en) | Monitoring system, monitoring method, and monitoring program | |
| JP6347211B2 (ja) | 情報処理システム、情報処理方法及びプログラム | |
| US9761012B2 (en) | Object tracking device, object tracking method, and computer-readable medium | |
| US20150146006A1 (en) | Display control apparatus and display control method | |
| JP5697587B2 (ja) | 車両火災検出装置 | |
| JP4769943B2 (ja) | 物体追跡装置、異常状態検知装置及び物体追跡方法 | |
| JP2017125974A (ja) | 表示装置、表示方法及びプログラム | |
| JP2021196741A (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP5177030B2 (ja) | 目標追尾装置 | |
| JP5177068B2 (ja) | 目標追尾装置、目標追尾方法 | |
| JP6336935B2 (ja) | 移動物体追跡装置 | |
| JP2023082590A (ja) | 画像処理装置、画像処理方法 | |
| JP2007510994A (ja) | ビデオ画像内でのオブジェクトトラッキング | |
| JP2017063402A5 (ja) | ||
| JP7332047B2 (ja) | 追跡装置、追跡システム、追跡方法、およびプログラム | |
| US11568557B2 (en) | Person counting image processing apparatus, method, and storage medium | |
| RU2718223C1 (ru) | Система и способ определения потенциально опасных ситуаций по видеоданным | |
| JP7256032B2 (ja) | 人物計数装置、人物計数方法及び人物計数プログラム | |
| WO2021193353A1 (ja) | 画像追跡装置、画像追跡方法、及びコンピュータ読み取り可能な記録媒体 | |
| JP2003319387A (ja) | 監視装置及び方法並びにプログラム | |
| EP4471717A1 (en) | Method and system for detecting a change of ratio of occlusion of a tracked object | |
| JP2010166104A (ja) | 目標追尾装置 | |
| JP2011103040A (ja) | 追尾装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20060307 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091126 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100225 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100310 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130402 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |