JP4477407B2 - 内視鏡 - Google Patents
内視鏡 Download PDFInfo
- Publication number
- JP4477407B2 JP4477407B2 JP2004134593A JP2004134593A JP4477407B2 JP 4477407 B2 JP4477407 B2 JP 4477407B2 JP 2004134593 A JP2004134593 A JP 2004134593A JP 2004134593 A JP2004134593 A JP 2004134593A JP 4477407 B2 JP4477407 B2 JP 4477407B2
- Authority
- JP
- Japan
- Prior art keywords
- insertion portion
- endoscope
- aws
- unit
- grip
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00039—Operational features of endoscopes provided with input arrangements for the user
- A61B1/00042—Operational features of endoscopes provided with input arrangements for the user for mechanical operation
Description
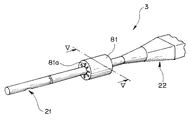
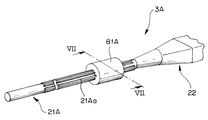
図1は本発明の一実施形態の内視鏡を含む内視鏡システムの全体構成を示すシステム構成図である。図2は本実施形態の内視鏡における操作部と挿入部との接続部位を拡大して示す要部拡大断面図である。なお、図2においては上半部のみの断面を示している。図3は図2のIII−III線に沿う断面図である。図4は本実施形態の内視鏡における挿入部に対してパワーグリップが所定の部位に装着されている状態を示す外観斜視図を示している。図5は図4のV−V線に沿う断面図である。
電源線や信号線が延出され、これらの電気配線は、コネクタ部51及び総合コネクタ部52を介してチューブユニット19の内部に挿通される電源線及び信号線(図示せず)と接点レスにて電気的に接続されている。そして、これらの電源線及び信号線は、スコープコネクタ41の内部において電源及び信号端子(図示せず)に接続されている。
3,3A……内視鏡
4……AWSユニット
5……内視鏡システム制御装置
6……観察モニタ
7……画像記録ユニット
8……UPDコイルユニット
18……内視鏡本体
19……チューブユニット
21,21A……挿入部
21Aa……凸状部
22……操作部
24……先端部
25……CCD
27……湾曲部
40……スコープコネクタ
40a……アダプタ取付部
41a 電気コネクタ部分
41……スコープコネクタ
42……AWSアダプタ
43……スコープ用電気コネクタ
44……送気コネクタ
45……ピンチバルブ
48……送水タンク
49a……吸引チューブ
49b……吸引タンク
50……送水タンク用コネクタ
51……コネクタ部
52……総合コネクタ部
53……蛇管
53……軟性部
53a……基端部
54A,54B……硬度可変用アクチュエータ
65……送気用ポンプ
67……折れ止め部材
68……把持部
4d,72b……ストッパー軸ストッパーピン
81,81A……パワーグリップ
81Aa……凹状溝部
代理人弁理士伊藤進
Claims (4)
- 細長形状の挿入部と、この挿入部の基端に設けられる操作部とを具備する内視鏡において、
前記挿入部が挿通される挿入部挿入孔と使用者により把持される握り部とを有し、前記挿入部に着脱自在に配設され、使用者によって前記握り部が把持されたときには、前記挿入部に対して固定されるように形成されるパワーグリップを具備し、
前記挿入部は、前記操作部に対して回動自在に構成されていることを特徴とする内視鏡。 - 前記操作部に対する前記挿入部の回動し得る回転角度はプラスマイナス(±)略90度以上となるように設定されていることを特徴とする請求項1に記載の内視鏡。
- 前記パワーグリップは、前記挿入部挿入孔の内径が前記挿入部の外径よりも若干大径となるように形成され、かつ前記挿入部挿入口の内周縁部から放射方向に少なくとも一つのスリットを形成した形態で構成されていることを特徴とする請求項1に記載の内視鏡。
- 前記挿入部の外表面上には凸状部または凹状溝部が形成され、
前記パワーグリップの前記挿入部挿入孔には、前記挿入部の前記凸状部または凹状溝部に嵌合する凹状溝部または凸状部が形成されていることを特徴とする請求項1に記載の内視鏡。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004134593A JP4477407B2 (ja) | 2004-04-28 | 2004-04-28 | 内視鏡 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004134593A JP4477407B2 (ja) | 2004-04-28 | 2004-04-28 | 内視鏡 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005312688A JP2005312688A (ja) | 2005-11-10 |
| JP2005312688A5 JP2005312688A5 (ja) | 2007-04-12 |
| JP4477407B2 true JP4477407B2 (ja) | 2010-06-09 |
Family
ID=35440755
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004134593A Expired - Fee Related JP4477407B2 (ja) | 2004-04-28 | 2004-04-28 | 内視鏡 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4477407B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2374400B1 (en) * | 2009-11-19 | 2013-05-29 | Olympus Medical Systems Corp. | Capsule medical apparatus system |
| EP2604172B1 (en) * | 2011-12-13 | 2015-08-12 | EndoChoice Innovation Center Ltd. | Rotatable connector for an endoscope |
| JP5586726B2 (ja) * | 2013-03-21 | 2014-09-10 | オリンパスメディカルシステムズ株式会社 | 内視鏡 |
| JP6360815B2 (ja) | 2015-07-14 | 2018-07-18 | 富士フイルム株式会社 | コネクタ及び内視鏡システム |
| GB2610814B (en) * | 2021-09-14 | 2023-09-27 | I Q Endoscopes Ltd | Endoscope system & elements thereof |
-
2004
- 2004-04-28 JP JP2004134593A patent/JP4477407B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005312688A (ja) | 2005-11-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11185216B2 (en) | Video endoscope and handle for a video endoscope including rotational support means | |
| JP4827477B2 (ja) | 内視鏡システムおよび当該内視鏡システムに適用するアダプタ | |
| US10918365B2 (en) | Medical retrieval systems and related methods | |
| JP3490932B2 (ja) | 飲み込み型内視鏡装置 | |
| JP4617059B2 (ja) | イメージング装置 | |
| EP1987788B1 (en) | Endoscope system and medical instrument | |
| JP2001095747A (ja) | 電子内視鏡 | |
| JP2003010099A (ja) | 内視鏡 | |
| WO2005082227A1 (ja) | 内視鏡および内視鏡システム | |
| JP4009613B2 (ja) | 内視鏡 | |
| JP2023507171A (ja) | モジュール式内視鏡用のシステム及び方法 | |
| CN215128274U (zh) | 转向控制机构、内窥镜和医用检查装置 | |
| JP4477407B2 (ja) | 内視鏡 | |
| CN214549342U (zh) | 软式内镜手术执行器 | |
| JP4075310B2 (ja) | 体腔内観察用テレビカメラ | |
| JP2005237817A (ja) | 内視鏡 | |
| JP4472416B2 (ja) | 内視鏡接続用アダプタ装置 | |
| US20210186308A1 (en) | Endoscope with detachable handle module | |
| JP4472382B2 (ja) | 内視鏡 | |
| JP3722732B2 (ja) | 内視鏡 | |
| JP4500095B2 (ja) | 内視鏡 | |
| JP3971400B2 (ja) | 内視鏡装置 | |
| WO2016157578A1 (ja) | 湾曲付き硬性内視鏡 | |
| JP2005304779A (ja) | 内視鏡 | |
| CN115363506A (zh) | 转向控制机构、内窥镜和医用检查装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070222 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090929 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100216 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100311 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4477407 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130319 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140319 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |