JP4476112B2 - 圧縮機の駆動装置 - Google Patents
圧縮機の駆動装置 Download PDFInfo
- Publication number
- JP4476112B2 JP4476112B2 JP2004357057A JP2004357057A JP4476112B2 JP 4476112 B2 JP4476112 B2 JP 4476112B2 JP 2004357057 A JP2004357057 A JP 2004357057A JP 2004357057 A JP2004357057 A JP 2004357057A JP 4476112 B2 JP4476112 B2 JP 4476112B2
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- rotational speed
- brushless motor
- compressor
- piston
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Control Of Positive-Displacement Pumps (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
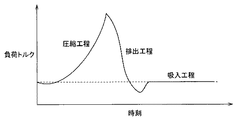
好ましくは、ピストンは、シリンダ内において第1および第2の死点間で往復動する。ピストンが第1の死点から第2の死点に移動することによってシリンダ内に気体が吸い込まれ、ピストンが第2の死点から第1の死点に移動することによってシリンダ内において気体が圧縮され、回転子が予め定められた位置で停止したときピストンは第2の死点で停止する。
Claims (2)
- シリンダ内でピストンを駆動させて気体を圧縮するブラシレスモータを備えた圧縮機において、前記ブラシレスモータを回転駆動させる駆動装置であって、
前記ブラシレスモータの複数の電動子巻線に駆動電流を供給するインバータ、
前記複数の電動子巻線の誘起電圧に基づいて、前記ブラシレスモータの固定子に対する回転子の位置を検出する位置検出手段、および
前記位置検出手段の検出結果に基づいて前記インバータを制御する制御手段を備え、
前記制御手段は、
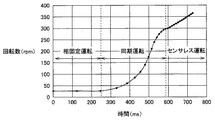
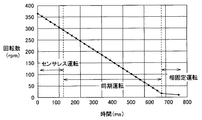
前記圧縮機の駆動停止が指示されたことに応じて、前記回転子の回転数を低下させるセンサレス運転手段、
前記センサレス運転手段によって前記回転子の回転数が同期回転数に低下されたことに応じて、前記ブラシレスモータを同期運転させて前記回転子の回転数をさらに低下させる同期運転手段、
前記同期運転手段によって前記回転子の回転数が予め定められた回転数に低下されたことに応じて、前記ブラシレスモータを相固定運転させる相固定運転手段、および
前記相固定運転手段によって前記ブラシレスモータが相固定運転されたことに応じて、前記位置検出手段の検出結果に基づいて前記回転子を予め定められた位置に停止させる停止手段を含むことを特徴とする、圧縮機の駆動装置。 - 前記ピストンは、前記シリンダ内において第1および第2の死点間で往復動し、
前記ピストンが前記第1の死点から第2の死点に移動することによって前記シリンダ内に前記気体が吸い込まれ、前記ピストンが前記第2の死点から第1の死点に移動することによって前記シリンダ内において前記気体が圧縮され、
前記回転子が前記予め定められた位置で停止したとき前記ピストンは前記第2の死点で停止することを特徴とする、請求項1に記載の圧縮機の駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004357057A JP4476112B2 (ja) | 2004-12-09 | 2004-12-09 | 圧縮機の駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004357057A JP4476112B2 (ja) | 2004-12-09 | 2004-12-09 | 圧縮機の駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006166658A JP2006166658A (ja) | 2006-06-22 |
| JP4476112B2 true JP4476112B2 (ja) | 2010-06-09 |
Family
ID=36668039
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004357057A Expired - Fee Related JP4476112B2 (ja) | 2004-12-09 | 2004-12-09 | 圧縮機の駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4476112B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5119025B2 (ja) | 2008-03-31 | 2013-01-16 | 株式会社日立産機システム | モータ制御装置、空気圧縮機、空気調和機、乗客コンベアの制御装置及びコンベアの制御装置 |
| KR101367680B1 (ko) | 2012-10-29 | 2014-03-12 | 삼성전기주식회사 | 모터 구동 제어신호 생성장치 |
| JP6610461B2 (ja) * | 2016-07-27 | 2019-11-27 | アイシン精機株式会社 | クランク機構付モータおよび真空ポンプ |
| KR102342001B1 (ko) * | 2020-05-26 | 2021-12-24 | 어보브반도체 주식회사 | 압축기의 제어 장치 및 압축기의 제어 방법 |
| CN112460771A (zh) * | 2020-11-30 | 2021-03-09 | 珠海格力电器股份有限公司 | 一种压缩机控制方法、装置、系统及存储介质 |
-
2004
- 2004-12-09 JP JP2004357057A patent/JP4476112B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006166658A (ja) | 2006-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102239630B (zh) | 电动机驱动装置以及使用它的压缩机和冰箱 | |
| US8084970B2 (en) | Electrical machine and method of controlling the same | |
| EP1375907B1 (en) | Engine starting device | |
| US8242725B2 (en) | Method for operating sensorless and brushless motors | |
| WO2004084401A1 (ja) | 電動圧縮機 | |
| EP1612925A3 (en) | A brushless DC motor controller | |
| JP4515432B2 (ja) | 圧縮機の駆動方法 | |
| KR20080103846A (ko) | 모터의 운전제어장치 및 방법 | |
| JP4476112B2 (ja) | 圧縮機の駆動装置 | |
| JP3672637B2 (ja) | 圧縮機電動機制御装置 | |
| JP2007092686A (ja) | 圧縮機の駆動装置 | |
| JP2015065730A (ja) | モータの起動制御装置および空気圧縮機 | |
| CN115839332B (zh) | 一种活塞压缩机启动的方法及压缩机启动装置 | |
| KR100859077B1 (ko) | 압축기 구동 모터의 기동제어 방법 | |
| WO2007116730A1 (ja) | レシプロ式圧縮機の制御装置及び制御方法 | |
| JP4289003B2 (ja) | ブラシレスdcモータの駆動方法及びその装置 | |
| JP4531180B2 (ja) | 同期モータおよび同期モータの起動方法 | |
| JPH09327194A (ja) | ブラシレスモータの制御方法 | |
| JP2015065729A (ja) | モータの起動制御装置および空気圧縮機 | |
| JP4046266B2 (ja) | 内燃機関駆動用ブラシレス回転電機の始動方法 | |
| JP3283377B2 (ja) | 直流電動機の同期起動装置 | |
| KR100677876B1 (ko) | 브러시리스 직류모터의 정렬제어방법 | |
| JP2004328850A (ja) | インバータ冷蔵庫の圧縮機モータ始動方法 | |
| KR20100058203A (ko) | 압축기의 제어방법 | |
| EP1753123A2 (en) | Methods and apparatus for controlling a motor/generator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070302 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091201 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100302 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100309 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130319 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130319 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140319 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |