JP4385759B2 - 車線逸脱防止装置 - Google Patents
車線逸脱防止装置 Download PDFInfo
- Publication number
- JP4385759B2 JP4385759B2 JP2003421423A JP2003421423A JP4385759B2 JP 4385759 B2 JP4385759 B2 JP 4385759B2 JP 2003421423 A JP2003421423 A JP 2003421423A JP 2003421423 A JP2003421423 A JP 2003421423A JP 4385759 B2 JP4385759 B2 JP 4385759B2
- Authority
- JP
- Japan
- Prior art keywords
- departure
- steering
- lane
- driver
- intention
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Description
そこで、本発明は、上記従来例の未解決の課題に着目してなされたものであり、運転者の意図しない車線逸脱を適切に判断して逸脱回避制御を行うことができる車線逸脱防止装置を提供することを目的としている。
図1は、本発明における実施形態の概略構成図である。この車両は、自動変速機及びコンベンショナルディファレンシャルギヤを搭載した後輪駆動車両であり、制動装置は、前後輪とも左右輪の制動力(制動液圧)を独立に制御可能としている。
図中の符号1はブレーキペダル、2はブースタ、3はマスタシリンダ、4はリザーバ、9はエンジン、10は自動変速機であり、通常は、運転者によるブレーキペダル1の踏込み量に応じ、マスタシリンダ3で昇圧された制動流体圧が、前輪5FL、5FR及び後輪5RL、5RRの各ホイールシリンダ6FL〜6RRに供給されるようになっている。また、このマスタシリンダ3と各ホイールシリンダ6FL〜6RRとの間には制動流体圧制御回路7が介装されており、この制動流体圧制御回路7内で、各ホイールシリンダ6FL〜6RRの制動流体圧を個別に制御することも可能となっている。
次に、前記コントロールユニット8で行われる車線逸脱防止制御処理について、図2及び図3のフローチャートに従って説明する。この車線逸脱防止制御処理は、例えば10msec毎のタイマ割込処理によって実行される。
V=(VwFL+VwFR)/2 ………(1)
なお、ABS制御等が作動している場合には、ABS制御内で推定された推定車体速度を用いるようにしてもよい。
Tout=(L/2−X)/dX ………(2)
なお、この逸脱予測時間Toutは、自車両のヨー角Φ、走行車線の曲率ρ、車両のヨーレートφ、操舵角θ等により予測するようにしてもよい。
ステップS6では、下記(3)式をもとに目標ヨーモーメントMsを0(零)に設定してから後述するステップS16に移行する。
Ms=0 ………(3)
ステップS8では、横変位Xの符号を判定し、X≧0であるときには自車両が走行車線中央から左方にずれていると判断してステップS9に移行し、逸脱方向Doutを左側であることを意味する“1”にセットして後述するステップS11に移行し、前記ステップS8の判定結果がX<0であるときには、ステップS10に移行して、逸脱方向Doutを右側であることを意味する“2”にセットしてステップS11に移行する。
ステップS11の判定結果が、Yg<YgTHであるときにはステップS12に移行して、運転者が車線変更をしようとしているか否かを判定する。この判定は、方向指示スイッチ信号WS及び操舵角θにより行い、方向指示スイッチ22がオン状態であるときに、方向指示スイッチ信号WSの符号により判断される方向と逸脱方向Doutとが一致している場合には、運転者の意図的な車線変更であると判断する。また、方向指示スイッチ22がオフ状態であるときに操舵角θが予め設定した操舵角設定値θS以上である場合にも、運転者の意図的な車線変更であると判断する。
ステップS15では、横変位Xとその変化量dXとに基づいて、下記(4)式をもとに車両に発生させる目標ヨーモーメントMsを算出してからステップS16に移行する。
Ms=K1・X+K2・dX ………(4)
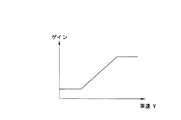
ここで、K1,K2は車速Vに応じて変動するゲインであり、夫々図5に示すゲイン算出マップを参照して算出する。
Ms=Ka・Φ+Kb・X+Kc・ρ ………(5)
ここで、Ka,Kb,Kcは車速Vに応じて変動するゲインであり、Ka,Kbは図5に示すゲイン算出マップを参照し、Kcは図6に示すゲイン算出マップを参照して算出する。
ステップS16では、目標ヨーモーメントMs及びマスタシリンダ液圧Pmに応じて、各輪の目標制動液圧Psi(i=FL〜RR)算出する目標制動液圧算出処理を行う。
前記ステップS16では、図3に示す目標制動液圧算出処理を行い、先ずステップS21で逸脱判断フラグFoutが逸脱傾向にないことを意味する“0”にリセットされているか否かを判定する。
PsFL=PsFR=Pmf/2 ………(6)
PsRL=PsRR=Pmr/2 ………(7)
ΔPsF=0 ………(8)
ΔPsR=2×KBR×|Ms|/T ………(9)
ΔPsF=2×KBF×(|Ms|−Ms1)/T ………(10)
ΔPsR=2×KBR×Ms1/T ………(11)
ここで、Tは前後輪同一のトレッドである。また、KBRは制動力を制動液圧に換算する場合の換算係数であり、ブレーキ諸元により定まる。
PsFL=Pmf/2 ………(12)
PsFR=Pmf/2+ΔPsF ………(13)
PsRL=Pmr/2 ………(14)
PsRR=Pmr/2+ΔPsR ………(15)
PsFL=Pmf/2+ΔPsF ………(16)
PsFR=Pmf/2 ………(17)
PsRL=Pmr/2+ΔPsR ………(18)
PsRR=Pmr/2 ………(19)
したがって、今、運転者がステアリング操作を行っておらず、自車両に外力が働いていない状態で、自車両が走行車線に沿って直進走行しているものとする。この場合には、図2の逸脱防止制御処理において、ステップS3でTout<Tsとなる逸脱予測時間Toutが算出されるので、ステップS4からステップS5に移行して、逸脱判断フラグFout=0となって逸脱傾向にないことを示す状態となり、ステップS6で目標ヨーモーメントMsが“0”に設定される。これにより、図3のステップS22で各車輪5FL〜5RRの目標制動圧PsFL〜PsRRには、運転者の制動操作に応じたマスタシリンダ圧Pmf及びPmrが夫々設定され、運転者のステアリング操作に応じた走行状態が継続される。
このように、運転者が方向指示スイッチを操作して意図的に車線変更をしようとして、走行車線から逸脱傾向にある場合には、逸脱防止制御を作動させないようにするので、運転者に違和感を与えることなく運転者の感覚に合った走行制御を行うことができる。
このように、操舵変化がない場合であっても、横加速度が所定値以上であるときには、運転者の意図に反する逸脱であると判断するので、自車両に横風等の外力が加わるなどにより走行中の車線から逸脱傾向にある場合には、確実に逸脱防止制御を作動して逸脱を回避することができる。
したがって、舵角に変化が生じた際には、その舵角変化が運転者の操舵によって発生したのか、外力によって発生したのかをトルクセンサで検出された操舵トルクによって判断するので、運転者の意図しない舵角変化を確実に検出して、運転者の意図しない車線逸脱時に車両にヨーモーメントを発生させ、運転者に違和感のない逸脱回避制御を行うことができる。
さらに、自車両が走行車線から逸脱傾向にあるときには、舵角変化量が所定値以上であり、且つ操舵トルクが転舵方向に対して逆向きであるときに、運転者の意思に反する逸脱であると判断して逸脱回避制御を作動するので、操舵変化が自車両に働く外力等によって発生したことを確実に検出して、運転者の意図しない車線逸脱時に適切に車線逸脱を回避することができる。
なお、上記実施形態においては、後輪駆動車に本発明を適用した場合について説明したが、前輪駆動車に本発明を適用することもできる。この場合には、ステップS2で、各車輪速度VwFL〜VwRRのうち、非駆動輪である後左右輪速度VwRL、VwRRの平均値から自車両の車速Vを算出すればよい。
7 制動流体圧制御回路
8 コントロールユニット
9 エンジン
13 CCDカメラ
14 カメラコントローラ
15 加速度センサ
16 マスタシリンダ圧センサ
20 操舵角センサ
21FL〜21RR 車輪速センサ
22 方向指示スイッチ
23 トルクセンサ
Claims (2)
- 自車両の走行車線からの逸脱を回避するように自車両を制御する車線逸脱防止装置において、
自車両の走行状態を検出する走行状態検出手段と、自車両の横加速度を検出する横加速度検出手段と、ステアリングの状態を検出するステアリング状態検出手段と、前記走行状態検出手段で検出された走行状態に基づいて、自車両が走行車線から逸脱傾向にあることを判断する逸脱判断手段と、該逸脱判断手段により自車両が走行車線から逸脱傾向にあることが判断されたときに、前記ステアリング状態検出手段で検出されたステアリング状態と前記横加速度検出手段で検出された横加速度とに基づいて、運転者の意思に反する逸脱であることを判断する逸脱意思判断手段と、該逸脱意思判断手段により運転者の意思に反する逸脱であることが判断されたときに、前記走行状態検出手段で検出された走行状態に応じて逸脱を回避する方向に自車両を制御する逸脱防止制御手段とを備え、前記ステアリング状態検出手段は、ステアリングホイールの舵角変化量を検出し、前記逸脱意思判断手段は、前記逸脱判断手段により自車両が走行車線から逸脱傾向にあることが判断されたときに、前記横加速度検出手段で検出した横加速度が所定値以上であり、且つ前記ステアリング状態検出手段で検出した舵角変化量が所定値より小さいとき、運転者の意思に反する逸脱であると判断することを特徴とする車線逸脱防止装置。 - 前記ステアリング状態検出手段は、ステアリングの操舵トルクを検出し、前記逸脱意思判断手段は、前記逸脱判断手段により自車両が走行車線から逸脱傾向にあることが判断されたときに、前記横加速度検出手段で検出した横加速度が所定値以上であり、且つ前記ステアリング状態検出手段で検出した舵角変化量が所定値以上であり、且つ前記ステアリング状態検出手段で検出した操舵トルクが転舵方向に対して逆向きであるとき、運転者の意思に反する逸脱であると判断することを特徴とする請求項1に記載の車線逸脱防止装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003421423A JP4385759B2 (ja) | 2003-12-18 | 2003-12-18 | 車線逸脱防止装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003421423A JP4385759B2 (ja) | 2003-12-18 | 2003-12-18 | 車線逸脱防止装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005178534A JP2005178534A (ja) | 2005-07-07 |
| JP4385759B2 true JP4385759B2 (ja) | 2009-12-16 |
Family
ID=34782658
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003421423A Expired - Fee Related JP4385759B2 (ja) | 2003-12-18 | 2003-12-18 | 車線逸脱防止装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4385759B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4770501B2 (ja) * | 2006-02-08 | 2011-09-14 | 日産自動車株式会社 | 車両挙動制御装置および車両挙動制御方法 |
| JP5150955B2 (ja) * | 2008-03-21 | 2013-02-27 | 本田技研工業株式会社 | 車両走行支援装置、車両、車両走行支援プログラム |
| KR101575277B1 (ko) * | 2014-08-11 | 2015-12-07 | 현대자동차 주식회사 | 운전자의 운전 성향 판단 장치 및 방법 |
| JP6683065B2 (ja) * | 2016-08-25 | 2020-04-15 | トヨタ自動車株式会社 | 車線逸脱抑制装置 |
| JP7596992B2 (ja) | 2021-09-24 | 2024-12-10 | 株式会社豊田自動織機 | 走行制御装置 |
-
2003
- 2003-12-18 JP JP2003421423A patent/JP4385759B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005178534A (ja) | 2005-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3982483B2 (ja) | 車線逸脱防止装置 | |
| JP4534754B2 (ja) | 車線逸脱防止装置 | |
| CN100488818C (zh) | 防止偏离行车线装置 | |
| JP4867313B2 (ja) | 車線逸脱防止装置 | |
| EP1298021B1 (en) | Lane-keep control system for vehicle | |
| JP4748122B2 (ja) | 車線逸脱防止装置 | |
| JP3823924B2 (ja) | 車両挙動制御装置 | |
| JP3642310B2 (ja) | 車線逸脱防止装置 | |
| US7200478B2 (en) | Lane departure prevention apparatus | |
| EP2259955B1 (en) | Lane departure prevention system and method | |
| CN100486845C (zh) | 车道偏离防止系统 | |
| JP2004322787A (ja) | 車線逸脱防止装置 | |
| JP4835309B2 (ja) | 車線逸脱防止装置 | |
| JP4385759B2 (ja) | 車線逸脱防止装置 | |
| JP4517854B2 (ja) | 車線逸脱防止装置及び車線逸脱防止方法 | |
| JP4396514B2 (ja) | 車線逸脱防止装置 | |
| JP4601946B2 (ja) | 車線逸脱防止装置 | |
| JP4423930B2 (ja) | 車線逸脱防止装置 | |
| JP2005182406A (ja) | 車線逸脱防止装置 | |
| JP4385751B2 (ja) | 車線逸脱防止装置 | |
| JP4496758B2 (ja) | 車線逸脱防止装置 | |
| JP4501967B2 (ja) | 車線逸脱防止装置 | |
| JP2006306203A (ja) | 車線逸脱防止装置 | |
| JP4613324B2 (ja) | 車線逸脱防止装置 | |
| JP2005202679A (ja) | 車線逸脱防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081021 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090908 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090921 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4385759 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121009 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121009 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131009 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |