以下、本発明について図面を参照しながら詳細に説明する。
先ず、本発明を適用した光学素子の一構成例について説明する。
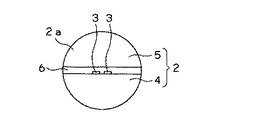
図1に示すように、本発明を適用した光学素子1は、近接場での位相変化を検出可能とするものであり、SIL(Solid Immersion Lens)と呼ばれるレンズ体2にプローブ3が埋め込まれた構造を有している。
具体的に、このレンズ体2は、高屈折率の光学ガラスからなる球体の一部を平らに削り取り、研磨して形成された半球状のレンズであり、平面側を集光された光ビームの出射面2aとし、球面側を集光された光ビームが入射される入射面2bとしている。さらに、このレンズ体2は、出射面2aと直交する方向、すなわち光軸Aに沿った方向に2分割された第1のレンズ素子4と第2のレンズ素子5とから構成されている。これら第1のレンズ素子4及び第2のレンズ素子5は、球体をその中心を通り且つ互い直交する2平面により4分割されてなる、いわゆる1/4球であり、出射面2aと直交する互いの接合面4a,5aを突き合わせて溶着又は光学接着剤を用いて接着により接合することで、全体略半球状のレンズ体2を構成している。
プローブ3は、図2及び図3に示すように、金属や、半金属、レンズ体2と異なる屈折率を有する透明導電材等の導体又は誘電体からなる。また、このプローブ3は、第1のレンズ素子4と第2のレンズ素子5との間に配置されるように、互いに接合される第1のレンズ素子4と第2のレンズ素子5との何れか一方の接合面(ここでは、接合面4a)にリソグラフィ技術を用いてパターン形成されている。具体的に、このプローブ3は、レンズ体2の光軸中心において、先端部3aが出射面2aに臨むと共に、光軸方向に長尺且つ微細な形状とされている。
ここで、レンズ体2の出射面2aに臨むプローブ3の先端部3aは、図4及び図5に示すように、このレンズ体2の出射面2aに集光される光ビームのスポットよりも小となる大きさ(幅、厚さ)で形成されている。ここでは、例えば幅が20nm程度、厚さが20nm程度となる大きさで略矩形状に形成されている。
なお、SILのような半球レンズの場合、レンズ体2の入射面2bから入射された光ビームは、出射面2aに対して垂直に入射する。このとき、レンズ体2の出射面2bに集光される光ビームのスポットは、1.22×λ/NAで決まる。また、開口数NA=n・sinθ(n:屈折率)である。
また、このプローブ3は、レンズ体2の内部に埋めまれる基端部3b側がレンズ体2の出射面2aに臨む先端部3a側よりも大となる形状を有している。
これにより、光学顕微鏡を用いて、レンズ体2に埋め込まれたプローブ3の位置確認を容易に行うことができる。特に、プローブ3の大きさが光学顕微鏡の分解能の限界となる100〜200nm程度以下となった場合には、このプローブ3の先端部3aの位置を光学顕微鏡で確認することは困難であり、このプローブ3の先端部3aとレンズ体2の出射面2aに集光される光ビームのスポットとの位置合わせができなくなる。そこで、プローブ3の基端部3b側を光学顕微鏡の焦点深度の数倍程度の深さから光学顕微鏡の分解能の限界以上の大きさ(幅、厚さ)とすることで、このプローブ3の位置確認が可能となる。
なお、プローブ3の基端部3b側は、レンズ体2の入射面2bから入射する光ビームを邪魔しない形状、すなわちレンズ体2に埋め込まれたプローブ3によって光ビームが屈折したり、反射によってレンズ体2の内部で光ビームの軌跡が影響を受けない形状とする必要がある。これにより、レンズ体2の光軸中心から入射した光ビームは、レンズ体2の出射面2bに集光された際に、超解像のスポットを形成することになる。
また、プローブ3が形成された第1のレンズ素子4の接合面4a上には、図3に示すように、このプローブ3を保護するための保護層6aと、第1のレンズ素子4と第2のレンズ素子5とを接着するための接着層6bとが形成されている。すなわち、第1のレンズ素子4と第2のレンズ素子5との間には、保護層6a及び接着層6bからなる中間層6が形成されている。保護層6aは、レンズ体2と同一材料からなる光学ガラスや酸化アルミニウム(アルミナ)等からなり、真空成膜法等により数μm程度の厚みで形成されている。接着層6bは、屈折率が光学ガラスと同程度、例えば1.4〜1.5以上となる光学接着剤からなる。
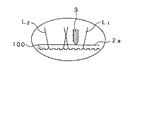
以上のように構成されるレンズ素子1は、レンズ体2に埋め込まれたプローブ3と、光記録媒体100に形成された導電体膜又は誘電体膜との電磁相互作用による光の微弱な位相変化を検出することを基本原理としている。
すなわち、この光学素子1を用いて、例えば光ディスク100の凹凸ピットを読み出す場合には、レンズ体2に埋め込まれたプローブ3と光ディスク100の表面にコートされた記録層(例えばCr)とが電磁相互作用を起こす。その作用は、プローブ3の先端部3aと記録層の表面との距離に依存する。このとき、プローブ3の先端部3aに検出光L1を集光すると、集光された検出光L1は、上記電磁相互作用により位相がずれる。これを参照光L2との位相差干渉効果を用いて検出することで、プローブ3の先端部3aの大きさに応じた解像度で信号の読み出しが可能となる。すなわち、集光された検出光L1のスポットS1よりも微少な凹凸ピットを再生することが可能となる。
具体的には、同一光源から出射されたレーザ光を検出光L1と参照光L2とに分岐して光学素子1に入射し、その出射面2aに2つのスポットS1,S2を形成する。そして、検出光L1のスポットS1に対応する位置にプローブ3を配置し、これら検出光L1と参照光L2との光ディスク100からの戻り光の干渉を利用して信号を再生する。
ここで、観測される位相差Δφは、数1で表される。すなわち、Siの電気感磁率χは、χ=14.0+14iであり、位相差Δφは、光ディスク100の表面にコートされたCrのχ(=−1.4+37.4i)との積に依存する。
したがって、プローブ3は、Cr,Si以外に、Au(χ=0.188+5.39i)やAl(χ=2.80+8.45i)のように、電気感磁率χの虚数部分の大きな導電材料を用いて形成することが好ましい。
次に、本発明を適用した光学素子1の製造方法について説明する。
上記光学素子1を作製する際は、先ず、図6に示すように、高屈折率を有する光学ガラスからなる第1のガラス基板20を用意する。そして、図7に示すように、この第1のガラス基板20上に、スパッタリング法や、イオンビームデポジション法等の真空成膜法によって、プローブ3となる薄膜21を成膜する。この薄膜21の材料としては、金属や、半金属、レンズ体2と異なる屈折率を有する透明導電材等の導体又は誘電体を用いることができる。ここでは、例えばCrからなる薄膜21を成膜した。また、プローブ3の厚さは、成膜時の膜厚によって決まるが、真空成膜法を用いた場合、膜厚をサブナノメータ精度で制御可能である。したがって、ナノメータ程度の極めて高精度な薄膜21が成膜されることになる。
次に、図8に示すように、この薄膜21が成膜された第1のガラス基板20上に、レジスト22を塗布する。
次に、図9に示すように、直接電子ビーム描画法(EB描画法)等の電子線リソグラフィ法によって、プローブ3に対応した複数のレジストマスク22aをパターン形成する。このレジストマスク22aは、EB描画法によって10〜20nm程度の幅で高精度にパターン形成することができる。
次に、図10に示すように、このレジストマスク22aを用いて、イオンミリングやリアクティブ・イオン・エッチング法(RIE法)等の真空エッチング法によって、レジストに覆われていない薄膜21を除去する。
次に、図11に示すように、第1のガラス基板20上からレジストマスク22aを剥離する。これにより、第1のガラス基板20上には、各光学素子1に対応した同一形状からなる複数のプローブ3がパターン形成されることになる。
なお、複数のプローブ3が形成された第1のガラス基板20上には、これらプローブ3を保護するための保護層6aが形成される。この保護層6aは、第1のガラス基板20と同一材料からなる光学ガラスや酸化アルミニウム(アルミナ)等からなり、真空成膜法等により数μm程度の厚みで形成される。
次に、図12及び図13に示すように、この第1のガラス基板20を複数のプローブ3が長手方向に並ぶ方向に沿って分割する。
次に、図14に示すように、分割された第1のガラス基板20のプローブ3が形成された面に、屈折率が光学ガラスと同程度、例えば1.4〜1.5以上となる光学接着剤を塗布することで接着層6bを形成する。そして、この第1のガラス基板20と、当該第1のガラス基板20と同一材料及び同一形状からなる第2のガラス基板23とを接着する。これにより、第1のガラス基板20と第2のガラス基板21とが互いに突き合わされて接合される接合面の間にプローブ3が位置するように接合一体化されたガラスブロック24が形成される。なお、第1のガラス基板20と第2のガラス基板23との接合方法としては、例えばオプティカルコンタクト法のように、表面粗度が良好な面を圧着し、熱を加えて接合面を溶着する方法を用いることができる。
次に、図15に示すように、このガラスブロック24に対して機械的研磨を施すことによって、円柱状のガラスブロック24を形成する。
次に、図16に示すように、各光学素子1に対応した略半球状の凹部25aが複数並んで形成された砥石25を円柱状のガラスブロック24の外周面に押し当てながら、このガラスブロックを図16中矢印X1方向に回転させる砥石研削加工を行う。これにより、各光学素子1に対応して分割された略球状のレンズ体26が形成される。
次に、図17に示すように、互いに平行に配置された2枚の研磨板27a,27bの間に、球状のレンズ体26を挟み込み、この研磨板27a,27bを図17中に示す矢印X2,X3方向、すなわち互いに逆向きに回転させることで、これら複数のレンズ体26に対して球面研磨加工を行う。
次に、図18に示すように、球状のレンズ体26を保持具28で保持し、この保持具29を研磨板29に対して図18中矢印X4方向に往復移動させながら、このレンズ体26に対して、接合面と直交する面をプローブ3の先端部が臨む位置まで平坦化する平面研磨加工を行う。これにより、平面研磨加工により平坦化された面を集光された光ビームの出射面2aとする半球状又は超半球状のレンズ体2が形成される。
ここで、各光学素子1に対応したプローブ3の基端部3b側には、位置決め基準となるマーカ3cが形成されている。球状のレンズ体26は、このマーカ3cによって内部に埋め込まれたプローブ3の位置確認を容易に行うことができ、このマーカ3cを基準にして平面研磨加工を行うことで、レンズ体2の光軸中心にプローブ3の中心を一致させると共に、プローブ3を出射面2aに対して垂直に配置することができる。
次に、図19に示すように、半球状のレンズ体2に対して仕上げ研磨加工を行う。具体的には、回転台30上に出射面(平面)2aを下面とした状態でレンズ体2を固定し、予め真球度を出したセラミック製の凹型31をレンズ体2の入射面(球面)2bに押し当てながら、レンズ体2を回転台30と一体に図19中矢印X5方向に回転させると共に、凹型31を図19中矢印X6方向に揺動させて研磨加工を行う。これにより、半球状のレンズ体2は、所定の真球度、表面粗度及び収差量を得ることができる。以上のようにして、上記光学素子1を一括して作製することができる。
次に、本発明を適用した光学素子1の別の構成例について説明する。
図20に示す光学素子1は、第1のレンズ素子4と第2のレンズ素子5との間に、複数のプローブ3を光軸と直交する方向に複数並べて配置した構成であり、これら複数のプローブ3は、上記プローブ形成工程において、レジストマスク22aを変更することにより容易にパターン形成することができる。
また、図21に示すように、互いに隣接するプローブ3の間隔Tは、レンズ体2の出射面2aに集光される光ビームのスポット径よりも大となることが望ましく、上記検出光L1と上記参照光L2との干渉を防ぐため、2つのスポットS1,S2間の距離よりも大となることが望ましい。
光学素子1では、これら複数のプローブ3を光軸と直交する方向に並べて配置することで、検出光L1のスポットS1に対するプローブ3の位置合わせを容易に行うことができる。すなわち、スポットS1とプローブ3の先端部3aとの相対位置は、レンズ加工誤差及びプローブ形成プロセス誤差により位置ずれが生じやすい。そこで、レンズ体2に対する光ビームの入射角を0゜(光軸方向)から僅かに傾けることにより、レンズ体2の出射面2aにおけるスポットの形成位置の調整を行う。また、入射角の調整量が増大すると、スポットの収差が増大したり、実効スポット径が増大し、検出感度の劣化を起こす可能性がある。そこで、プローブ3を光軸と直交する方向に複数並べて配置し、且つ互いに隣接するプローブ3の間隔TをスポットS1,S2間の距離よりも僅かに大きい程度に抑えれば、スポット位置調整量を最大プローブ間隔以内に抑えることが可能となる。
例えば、NAが1.3程度のSILのレンズ体2にプローブ3を埋め込み形成した場合には、スポット径は、およそ0.6μm程度となり、スポット間隔は、SILの直上のウォラストンプリズムの分離角を0.5゜とすると、5μm程度となる。この場合、プローブ間隔Tは、例えば6〜8μm程度とすることが望ましい。
また、複数のプローブ3は、図22及び図23に示すように、第1のレンズ素子4と第2のレンズ素子5との何れか一方の接合面4a,5にリソグラフィ技術によりパターン形成することで、同一面内に複数並べて配置することができる。
これに対して、複数のプローブ3は、図24及び図25に示すように、第1のレンズ素子4と第2のレンズ素子5との間に配置された中間層6を介して積層形成する、或いは第1のレンズ素子4の接合面4a及び第2のレンズ素子5の接合面5aにリソグラフィ技術によりパターン形成することで、異なる面内に複数並べて配置することができる。
また、複数のプローブ3は、形状、寸法、材質のうち少なくとも1つが異なる2種類以上のプローブから構成されたものであってもよい。
この場合、例えば、プローブ3の寸法が異なるものを並べて配置することで、再生時に高分解能モードと低分解能モードとを切り替えるといった使用が可能となる。
また、上記レンズ素子1では、図26及び図27に示すように、再生用プローブ32と記録用プローブ33とを並べて配置し、再生及び記録を行う構成としてもよい。
このうち、再生用プローブ32は、Si,Au,Ag等の導電体で形成されている。このプローブ32の先端部32aの寸法は、幅20nm程度であり、厚さ20nm程度である。また、プローブ32の幅及び厚さを10nm以下とすることで、更なる高分解能化が可能である。そして、この再生用プローブ32は、検出光L1のスポットS1内に配置されている。
一方、記録用プローブ33は、Rh等のエレクトロマイグレーションが生じにくい導電体で形成されている。このプローブ33の先端部33aの寸法は、再生用プローブ32と同様に、幅20nm程度であり、厚さ20nm程度である。
記録時には、光記録媒体100として誘電体薄膜が形成されたものを用い、記録用プローブ33の先端部33aにパルス電圧を加えることで、ナノ分極ドメインを形成することが可能である。或いは、検出光L1や参照光L2以外の光ビームのスポット内に記録用プローブ33を配置し、ドメイン内の温度を誘電体薄膜のキュリー温度まで上げることにより、抗電界を用いてよりドメインサイズの小さい記録を行うことが可能である。
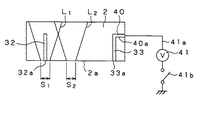
また、上記レンズ素子1は、図26及び図27に示すように、上述した単体又は複数のプローブ3に対して電流を流すための電極40を配置した構成であってもよい。
この電極40は、第1のレンズ素子4と第2のレンズ素子5との間に配置されるように、第1のレンズ素子4と第2のレンズ素子5との少なくとも一方の接合面(ここでは、接合面4a)にパターン形成された導体パターン40aからなる。この導体パターン40aは、一端部がプローブ3と電気的に接続されると共に、光軸と略直交する方向に延長された他端部が入射面2aの第1のレンズ素子4と第2のレンズ素子5との間から外部に臨む位置までパターン形成されている。
この電極40が形成された光学素子1では、導体パターン40aの他端部が外部配線41aを介して外部電源41と電気的に接続されている。したがって、この電極40からプローブ3に対して、外部電源41のスイッチ41bを切り替えることによって高周波電圧或いは電流変化を印加し、光記録媒体100に形成された導電体膜又は誘電体膜とプローブ3との相互作用を高周波と同期した信号として取り出すことができ、光記録媒体100に記録された信号を高感度に検出し再生することができる。
また、電極40は、図28に示すように、光軸と直交する方向に複数並んで設けられたプローブ3の各基端部3bと1本の導体パターン40aとが電気的に接続された構成であってもよい。この場合、各プローブ3は、全く等価なものとなり、電極40と同電位に接続される。
一方、電極40は、図29に示すように、光軸と直交する方向に複数並んで設けられた各プローブ3に対応して複数の導体パターン40aが設けられた構成であってもよい。この場合、各プローブ3は、別個独立に各導体パターン40と接続され、各外部電源41のスイッチ41のオン/オフを切り替えることで、高周波を重畳するプローブ3を選択することが可能である。すなわち、独立した複数のプローブ3が並ぶことで、いわゆるマルチチャンネル再生記録が可能となる。これにより、データレートの向上が可能である。
ところで、上記光学素子1を用いた信号再生方法では、プローブ3の先端部3aにおいて最小浮上量が得られることがスペーシング制御及び信頼性確保の上で重要となる。特に、ナノメータオーダの再生分解能を得るためには、レンズ体2の出射面2aと光記録媒体100との間の距離(スペーシング)を10〜50nm程度まで近接させる必要がある。しかしながら、レンズ体2が傾いた場合には、このレンズ体2の両側でスペーシングの差が生じてしまい、両者の最小隙間が低下してしまう。したがって、光記録媒体の表面粗さや外部振動の影響等を考慮すると、スペーシングの低下量は、10nm以下に抑える必要がある。
ここで、レンズ体2の出射面2aの直径を1mmとすると、レンズ体2の両側に発生するスペーシングの差を10nm程度に抑えるには、レンズ体2の傾き(チルト角θ)をθ=tan−1(10nm/1mm)=1×10−4度(゜)まで低減しなければならない。
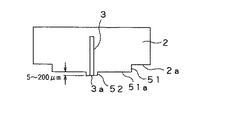
そこで、このような問題を解決するために、レンズ体2の出射面2aには、図30及び図31に示すように、プローブ3の周辺部がパット面51aとして突出された第1の突部51が設けられている。この第1の突部51は、レンズ体2の光軸を中心とした略円柱状の突部であり、パッド面51aの直径をφ10〜100μm程度とし、このパッド面51aの周囲をエッチングすることで、1〜20μm程度の高さで突出形成されている。
ここで、図32に示すように、パッド面51aの直径をDとしたとき、姿勢角θにより生じる浮上量の低下量Δhは、Δh=D×tanθとなる。このように、浮上量の低下量Δhは、パッド面51aの直径Dに比例するので、例えば出射面2aの直径が1mm程度のレンズ体2であっても、パッド面51aの直径Dをφ10μm程度とする第1の突部51を出射面2aに突出形成することによって、この浮上量の低下量Δhを1/100程度に低減することができる。
また、レンズ体2の出射面2aに第1の突部51を設けた場合には、パッド面51aの直径Dの低減に伴い、逆に許容チルト角θは大きくなる。例えば、パッド面51aの直径Dを50μm程度とすると、レンズ体2の両側でのスペーシングの差hを10nm程度に抑えるには、レンズ体2の傾き(許容チルト角θ)は、θ=tan−1(10nm/50μm)=1×10−2度(゜)となる。この角度θは、機械的なチルト角調整で実現できる範囲である。
さらに、パッド面51aのプローブ3の先端部が臨む中央部には、略円柱状の第2の突部52が突出形成されている。この第2の突部52は、直径がφ1〜10μm程度であり、高さが5〜20nm程度である。このように、プローブ3の近傍を僅かに突出させる第2の突部52を設けることで、プローブ3の先端部3aにおいて最小浮上量が得られることを確実とすることができる。
次に、上記光学素子1を搭載した光学ヘッドについて説明する。
図33に示すように、本発明を適用した光学ヘッド60は、光ビームLを集光させる対物レンズ61と、この対物レンズ61により集光される光ビームLの光路中に配置された上記光学素子1と、これら対物レンズ61及び光学素子1からなる集光レンズを支持する支持体62とを備えている。
支持体62には、厚み方向に貫通する貫通孔63が設けられており、この貫通孔63には、下面からレンズ体2の出射面2aが臨む上記光学素子1が保持されている。また、支持体62の上面部には、貫通孔62を閉塞するように対物レンズ61が上記光学素子1と光軸を一致させた状態で固定されている。
また、支持体62は、浮上スライダを構成しており、この浮上スライダ62が光記録媒体100上を浮上しながら、光記録媒体100に再生光を照射して信号再生を行う。なお、浮上スライダ62と光記録媒体100との間の距離は、10〜50nm程度であり、±1nmの精度で浮上スライダ62が光記録媒体100上を浮上することになる。
この光学ヘッド60を作製する際は、先ず、図34に示すように、浮上スライダとなる基板62aを用意し、この基板62aに貫通孔63を設け、この貫通孔63に上記光学素子1を固定する。なお、この基板62aの上下面には、予め所定の平行度を満足するように両面研磨が施されている。また、光学素子1の固定は、エポキシ系接着剤等による接着或いは低融点ガラスによる溶着で行う。
次に、光学的に設定された半球高さ又は超半球高さとなるまで、基板62aの下面を研磨する。また、この基板62aの上面に、対物レンズ61を光学的に位置決めした状態で接着する。なお、基板62aの板厚を対物レンズ61の作動距離(ワーキングディスタンス)と一致させるため、この基板61aの上面を研磨してもよい。以上のようして、上記光学ヘッド60を作製することができる。
次に、上記光学ヘッド60を用いて、近接場光を利用した光ディスク100に対する信号の再生を行うディスクドライブ装置について説明する。
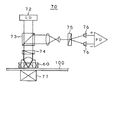
図35に示すように、本発明を適用したディスクドライブ装置70は、光ディスク100を回転駆動する回転駆動手段となるスピンドルモータ71と、このスピンドルモータ71により回転駆動される光ディスク100に対してレーザ光を出射する光源となるレーザダイオード(LD)72と、このレーザダイオード72から出射されたレーザ光の光路中に配されたビームスプリッタ73と、このビームスプリッタ73を透過したレーザ光を検出光L1と参照光L2とに分岐するウォラストンプリズム74と、これら検出光L1及び参照光L2を集光させて光ディスク100の信号記録面に照射する上記光学ヘッド60と、光ディスク100の信号記録面で反射された戻り光をビームスプリッタ73で反射した後に分岐させるウォラストンプリズム75と、このウォラストンプリズムで75分岐されたレーザ光を受光する光強度検出手段となる一対のフォトディテクタ(PD)76とを備えている。
このディスクドライブ装置70では、スピンドルモータ71により回転駆動される光ディスク100の信号記録面上を浮上スライダ62が浮上しながら、光ディスク100に対する信号の再生が行われる。
具体的に、レーザダイオード72から出射されたレーザ光は、図36に示すように、ビームスプリッタ73と光学ヘッド60の対物レンズ61との間に配置されたウォラストンプリズム74によって僅かな角度で分岐され、一方は検出光L1としてプローブ3の先端部3aに集光され、他方は参照光L2としてプローブ3の先端部3aから外れた位置に集光される。また、光ディスク100の凹凸ピットが形成された信号記録面からの戻り光は、ビームスプリッタ73により反射された後、ウォラストンプリズム5によって分岐されて一対のフォトディテクタ76へと導かれる。
そして、一対のフォトディテクタ76が受光した検出光L1と参照光L2との位相差を干渉測定することにより、光ディスク100からの再生信号が検出される。例えば、プローブ3の先端部3aが光ディスク100のピットの凸部と対向する位置にあるときと、凹部と対向する位置にあるときとで、プローブ3の先端部3aと光ディスク100の記録層との間の距離が変わる。その結果、電磁相互作用の強さが変わり、位相のずれが僅かに変わる。この位相のずれの変化を上記干渉測定により検出し、ピット(信号)を再生する。
また、上記光学ヘッド60は、図37に示すように、上記浮上スライダ62に代わって、支持体62にヘッド媒体間の距離を測定する測定手段となるセンサ(図示せず)と、このセンサからの測定結果に基づいて、ヘッド媒体間の距離を調整するヘッド駆動手段となるアクチュエータ64とが搭載された構成とすることも可能である。
センサとしては、ナノメータオーダで測定可能な静電容量センサ等を用いることができる。アクチュエータ64は、光学ヘッド60を光軸と平行な方向と光軸方向と直交する方向とに、それぞれナノメータオーダで変位駆動するものである。アクチュエータ64としては、例えば光学ピックアップに用いられるボイスコイルモータや、PZT(ピエゾ素子)アクチュエータ等を用いることができる。なお、この光学ヘッド60と光記録媒体100との間の距離は、10〜50nm程度であり、±1nmの精度で光学ヘッド60が光記録媒体100上を走査することになる。
また、記録及び/又は再生装置では、図38に示すように、このようなアクチュエータ64を搭載する光学ヘッド60を用いる場合、上記ディスクドライブ装置70のスピンドルモータ71に代わって、光記録媒体100が載置されるステージ77aを光記録媒体と平行な面内で互いに直交する2方向に移動させるアクチュエータ77を移動手段として備えた構成とする。なお、このアクチュエータ77には、PZTアクチュエータ、ボイスコイルモータ、ステッピングモータ等を用いることができる。
この場合、光記録媒体100が載置されたステージ77aがアクチュエータ77により面内方向に移動操作されることによって、この光記録媒体100上を光学ヘッド60が走査しながら、光記録媒体100に対する信号の再生が行われる(光学ヘッド60を用いた信号の再生方法については同様であることから、以下説明を省略する。)。
また、上記光学ヘッド60は、近接場光を利用した試料の観察を行う近接場光学顕微鏡装置に使用することも可能である。すなわち、この近接場光学顕微鏡装置は、上記ディスクドライブ装置70とほぼ同様の構成及び原理を用いて、試料の表面を光学ヘッド60が走査しながら、レンズ体2に埋め込まれたプローブ3と、試料表面との電磁相互作用による光の微弱な位相変化を検出することで試料の観察を行う。すなわち、同一光源から出射されたレーザ光を検出光L1と参照光L2とに分岐して光学素子1に入射し、その出射面2aに2つのスポットS1,S2を形成する。そして、検出光L1のスポットS1に対応する位置にプローブ3を配置し、これら検出光L1と参照光L2との試料表面からの戻り光の位相差干渉効果を用いて検出することで、プローブ3の先端部3aの大きさに応じた解像度で試料の観察が行われる。
以上のように、本発明を適用した光学素子1では、プローブ3のレンズ体2の出射面2aに臨む先端部3aが当該レンズ体2の出射面2aに集光される光ビームのスポットよりも小となることから、当該光ビームのスポットよりも微小なマークを検出することが可能である。具体的には、プローブ3先端部3aの微細化を進めることによって、数〜数10ナノメータオーダのマークを検出することが可能である。
また、プローブ3は、互いの接合面4a,5aを突き合わせて接合される第1のレンズ素子4と第2のレンズ素子5との何れか一方の接合面4a,5bにパターン形成されることで、この接合面4a,5aと直交する光ビームの出射面2aに臨む当該プローブ3の先端部3aを光軸方向に長尺且つ微細な形状とすることが可能である。
また、プローブ3の微細化は、薄膜形成技術や電子線リソグラフィ技術等を用いることによって、プローブ3の先端部3aの大きさ(幅、厚さ)を数〜数10ナノメータオーダで制御可能なことから、容易且つ再現性よく達成することができる。一方、プローブ3の先端部3aは、幅をナノメータオーダとしたまま、長さを数〜数100μm程度に極めて長く形成することが可能である。
したがって、この光学素子1では、プローブ3の先端部3aの摩耗による影響を受けることなく、高分解能での検出が可能となり、信頼性を大幅に向上させることが可能である。
また、本発明を適用した光学素子1の製造方法では、レンズ体2の出射面2aに集光される光ビームのスポットよりも微小なマークを検出し得ると共に、プローブ3の先端部3aの摩耗による影響を受けることなく、高分解能での検出が可能な信頼性の高い上記光学素子1を容易且つ再現性に優れた方法で一括作製することが可能である。
また、本発明を適用した光学ヘッド60では、そのような光学素子1を搭載することで、煩雑なサーボ機構が不要となり、近接場光を用いた検出を高感度且つ高速に行うことが可能である。
また、本発明を適用したディスクドライブ装置70等の記録及び/又は再生装置では、そのような光学ヘッド60を用いることで、光記録媒体に対する信号の記録及び/又は再生を高密度に行うことが可能である。
また、本発明を適用した光学顕微鏡装置では、そのような光学ヘッド60を用いることで、試料に対する観察を高分解能で行うことが可能である。
なお、本発明は、上述したSILのような光学素子1に限らず、例えば図39に示すようなSuper−SILと呼ばれる超半球のレンズからなる光学素子や、図40に示すようなSIMと呼ばれる半球レンズ又は超半球レンズに反射膜が形成された光学素子にも適用可能である。
また、本発明では、上述した光記録媒体100として、凹凸ピットにより情報が記録されている光ディスクだけでなく、相変化型の光ディスクにおいても、記録マークを検出することが可能である。相変化型の光ディスクでは、例えばGeSbTeなどの相変化材料により形成された信号記録層に対して、光熱記録により、反射率の異なる記録マークが形成される。相変化型の光ディスクにおける反射率の違いは、上記電気感磁率χの違いを意味している。したがって、本発明では、相変化型の光ディスクに形成された微小ピット長の記録マークを検出することが可能である。
同様に、導電体をパーマロイのような高透磁率の材料、または鉄のような強磁性体を用いることによって、光磁気あるいは磁気記録媒体の微少磁区を検出することが可能である。例えば、パーマロイをスライダの下面に配し、これに高周波電流を流し、発生した局部微少磁界が光ディスク上の上向き磁区と下向き磁区とにより、ごく僅か磁界分布に変化を生ずる。この磁界分布の変化は、光との相互作用により光の位相の変化となって検出される。
1 レンズ素子、2 レンズ体、2a 出射面、3 プローブ、3a 先端部、4 第1のレンズ素子、5 第2のレンズ素子、6 中間層、20 第1のガラス基板、23 第2のガラス基板、24 ガラスブロック、40 電極、60 光学ヘッド、70 ディスクドライブ装置、100 光記録媒体