JP4358440B2 - ナビゲーションシステムにおけるルート決定のためのソースデータに作用を与える方法 - Google Patents
ナビゲーションシステムにおけるルート決定のためのソースデータに作用を与える方法 Download PDFInfo
- Publication number
- JP4358440B2 JP4358440B2 JP2000558357A JP2000558357A JP4358440B2 JP 4358440 B2 JP4358440 B2 JP 4358440B2 JP 2000558357 A JP2000558357 A JP 2000558357A JP 2000558357 A JP2000558357 A JP 2000558357A JP 4358440 B2 JP4358440 B2 JP 4358440B2
- Authority
- JP
- Japan
- Prior art keywords
- route
- data
- weight
- database
- edge
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096805—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route
- G08G1/096827—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route where the route is computed onboard
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096833—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route
- G08G1/09685—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route where the complete route is computed only once and not updated
Description
発明の属する技術分野
本発明は、ディジタルデータベースに基づき移動手段たとえば車両、航空機または船舶のために、まえもって定められたスタートポイントからまえもって定められたターゲットポイントまでのルートを決定するためのソースデータに作用を与える請求項1の上位概念に記載の方法に関する。この場合、前記ディジタルデータベースは、まえもって定められた経路区間ki を、それら個々の経路区間ki を相互に結ぶ相応に割り当てられたノードポイントni とともに有しており、前記の経路区間ki および/またはノード区間ni に個々のウェイトgi が割り当てられている。
【0002】
たとえばGPS(Global Positioning System)をベースとするようなナビゲーションシステムは、まえもって定められた目的地までのナビゲーションにあたり、移動手段の運転者を支援する。この場合、ナビゲーションシステムは、少なくとも出発地座標と目的地座標ならびに実際の道路網のコピーである相応のディジタルデータベースに基づき、最適な経路もしくは最適なルートを決定する。しかしながら、自立的に求められたナビゲーションシステムのルートであると、これまでのナビゲーションシステムの場合には実際の交通事象たとえば特定の道路区間での渋滞などが考慮されず、または不十分にしか考慮されない。
【0003】
発明の開示、課題、解決手段、利点
本発明の課題は、冒頭で述べた形式の方法において、上述の欠点を解消し、実際の交通状況で生じたそのような交通事象の作用を、適切なやり方でディジタルマップベースに簡単に変換するよう改良することにある。
【0004】
この課題は、冒頭で述べた形式の方法において請求項1または請求項2記載の特徴により解決される。
【0005】
さらに本発明によれば、ウェイトgi を外部の事象に依存して変更してから、ルート探索アルゴリズムによりルートを決定するように構成されている。
【0006】
これにより得られる利点とは、たとえばルート探索アルゴリズムにより最適な経路を見つけ出す際、設けられているディジタルマップベースに作用が及ぼされた後に代案ルートが生じ、それは基礎を成す交通状況を非常に正確に考慮したものとなる。
【0007】
請求項2から9には本発明の有利な実施形態が示されている。
【0008】
この場合、ウェイトgi の合計が最小となるようルート探索アルゴリズムによってルートを決定することにより、最適なルートガイドが実現される。
【0009】
本発明による方法の有利な実施形態によれば、ウェイトgi は、個々の経路区間ki の経路長li、個々の経路区間ki の走行時間tki および/または個々のノードポイントni における個々の待ち時間tni である。その際、ノードポイントはたとえば国境通過地点または料金所であり、待ち時間は個々の手続完了時間に関係する。
【0010】
好適には、ウェイトgi を変更するためのデータをデータソースが供給し、そのデータをデータシンクにおいて処理する。その際、データソースは、交通メッセージ用の受信機、イベントデータバンクおよび/またはデータベースに交通メッセージをマッピングするデータバンクであり、データシンクは、たとえばナビゲーションシステムにおけるナビゲーションコンピュータ内で交通メッセージデータを処理するソフトウェアである。
【0011】
事象に即してウェイトを変更するため、データソースおよび/またはまえもって定められたウェイト変更のためのデータシンクにより外部の事象を分類する。
【0012】
1つの有利な実施形態によれば、ウェイトgi は経路区間ki の走行時間tkiであり、変更されたウェイトtki neuは式
【0013】
【数3】

に従って得られ、ここでV(ki)は経路区間ki での速度であり、ΔVc は外部の事象に基づく経路区間速度の変更である。
【0015】
別の有利な実施形態によれば、ウェイトgi は経路区間ki の走行時間であり、データベースは階層的に構成されていて、変更されるウェイトtki neuは式
【0016】
【数4】
に従い得られ、ここでV(ki)は経路区間ki での速度であり、ΔVc は外部の事象に基づく経路区間速度の変更であり、ΔlLevelj は全エッジ長のパーセントで表した長さ配分であり、この長さの配分によって、階層状のデータベースの縮尺単純化レベルjにおける配分に応じた作用が表される。
【0018】
図面の簡単な説明
次に、添付の図面を参照しながら本発明について詳しく説明する。
【0019】
図1は、実際の道路網をマッピングするディジタルデータベースを示す図である。
【0020】
図2は、経路区間もしくはエッジとディジタルデータベースの経路区間ウェイトもしくはエッジウェイトとの対応関係を示す図である。
【0021】
図3は、ディジタルデータベースに基づく自動車のためのルートの実例を示す図であって、この場合、個々の走行時間がエッジのウェイトとして割り当てられている。
【0022】
図4は、ディジタルデータベースの階層構造を示す図である。
【0023】
図5は、交通事象の分類を示す図である。
【0024】
図6は、図3によるディジタルデータベースに基づく自動車のためのルートの実例を示す図である。
【0025】
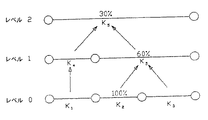
図7は、変更されたウェイトを階層データベースにおける1つの縮尺単純化レベルから次のレベルへ一貫して受け渡す様子を示す図である。
【0026】
本発明を実施するための最良のやり方
次に、本発明による方法の動作説明のため、図1〜図4を参照しながら、ディジタル形式のデータベースないしはマップベースによる実際の道路網のマッピング、ならびにルート探索アルゴリズムによるその方法について詳しく説明する。
【0027】
ディジタルマップベースによる実際の道路網のマッピングは、たとえば図1に示されている形態をもつ。このように道路網は、数学的に簡単に2分グラフによって表される。そこにおいて道路の通りは、方向づけられた経路区間またはネットエッジ(ki)によってシンボリックに表される。ネットノード(ni)によって、道路要素相互間の結合(交差点、高速道路ジャンクション等)が表される。これらの属性を用いることで、このようなネットに関して経路記述を生成することができる。エッジの名前やその方向(エッジベクトル)に関して1つの経路はエッジリストのかたちで、規定されたスタートエレメントから出発して設定されたターゲットエレメントまで、一義的に規定される。
【0028】
ネット内のエッジに特定の属性(エッジウェイト)を割り当てる場合にはそのようなネットに対し、目下の車両位置(スタートエッジ)から出発して所望の目的地(ターゲットエッジ)まで、最適なルートを決定するアルゴリズム手法を適用することができる。この場合、エッジに割り当てられたウェイトは、様々な種類のものである。アルゴリズムにとって重要であるのは、データベースのすべてのエッジからアルゴリズムによって使用されたウェイトを取り出せることである。この課題を解決する公知の手法は、たとえば Ford または Moore による最適化アルゴリズムである。最も簡単な事例では、たとえば個々のエッジのエッジウェイトとして、図2の表に示されているように、それらの固有の長さを割り当てることができる。
【0029】
ついでこのようなネットに固有のルートサーチアルゴリズムが適用される。この目的は、見つけ出された選択に対し、「関与しているすべてのエッジウェイトの合計が、スタートエッジからターゲットエッジに至る決定可能な他のどのようなエッジ選択よりも小さい」ことがあてはまるよう、エッジ選択を決めることである。したがってこの手法によって、スタートエッジとターゲットエッジとの間の可能な最短接続が求められ、これは図1の実例では以下のとおりとなる:
k1 -> -k5 -> k8 -> -k10
ここで極性符号は、所定のエッジベクトルに関する走行方向を表す(正の極性符号:ベクトル方向;負の極性符号:反ベクトル方向)。
【0030】
エッジの属性づけのため、ウェイトとして他の解釈も可能である。走行時間に関して最適な経路を求めるため、たとえばウェイトとしてマップに走行時間を割り当てることができる。それらの走行時間は、エッジ長と区間要素(図3)において車両のとっている速度とから得られる。上述の記載において用いられたルート探索アルゴリズムは図3の実例であれば、25秒の最小総走行時間をもつ最適なルート K1 -> -k5 -> k6 を見つけ出す。
【0031】
次に図4を参照しながら、ディジタル形式のマップベースもしくはデータベースの構造について説明する。ディジタル形式のデータベースの規模ならびに計算技術的に制限された自立的ナビゲーションシステムの性能ゆえに一般に、そのようなデータベース(たとえばドイツ)を全体的にルート探索アルゴリズムによって用いることはできず、好適には種々の領域に分割される。このため、様々な分解能によって道路網を記述する複数のレベルへの分割を行うことができる(図4)。そのような部分領域の重要な特性は、それらがグラフエレメントの個数においてまえもって定められたオーダを超えない、ということである。このため道路マップのいっそう高い分解能のレベルには、相応に多くの部分領域が含まれる。
【0032】
この場合、階層状のディジタルデータベースの構造ならびに使用法を、地図帳形式の構造と似たものとして思い浮かべることができる。データベースによってカバーされる領域は、最も高い分解能では個々のページにおいて複数の部分領域に分割される。隣り合うページへの参照は、各ページ間の関係によって形成される。しかしながら一般的にユーザやアルゴリズム手法にとっては、1つのページまたは制限された個数のページしか同時に処理できない。このため、かなり遠い距離に及ぶルートを求めるためには、概要マップの形式でさらに縮尺単純化された表示が必要とされる(ディジタルデータベースの縮尺単純化されたレベル)。
【0033】
本発明による方法によれば、前述のグラフ(データベースと呼ぶ)における個々のエレメントのウェイトを、交通事象に依存して適切に変更することができる。この場合、操作すべきウェイトがグラフ中でエッジウェイトとして表されるのか、および/またはノードウェイトとして表されるのかは、重要ではない。以下では実例としてエッジウェイトについて説明するが、本発明はそれに限定されるものではない。たとえば交通事象の処理によって、エッジウェイトが変更される。エッジウェイトにマッピングされる他のどのような作用であっても、本発明による方法によって処理することができる。
【0034】
一貫したウェイト変更のために必要とされるすべてのデータは、少なくとも1つのデータソースへ完全に供給される。データシンクは、データソースから供給されたデータをデータベース内のデータと結びつける。データソースはたとえば交通メッセージの受信機、イベントデータバンクおよび/またはデータベースへ交通メッセージをマッピングするデータバンクであり、その際、作用を与えるべきデータベースエレメントを求めるやり方は、本発明による方法とは無関係である。データシンクはたとえば、ナビゲーションシステムのナビゲーションコンピュータにおいて交通メッセージデータを処理するソフトウェアである。
【0035】
あるグラフエレメントのウェイトを変更するため、ウェイト変更のソースと処理を行うシンクとの間のウェイト変更のフォームに関する取り決めが設けられている。このような取り決めは、たとえば事象の分類である。この場合、受信機は、定められたルールに従い交通メッセージに識別子をつける。ナビゲーションにおいて識別子に、規定されたウェイト変更を割り当てる。しかし本発明による方法によれば、メッセージ自体によってウェイト変更を規定することも可能である。その場合には、交通メッセージの送信側によってウェイト変更が指定される。ナビゲーション内には、ウェイト変更のためのデータは記憶されていない。
【0036】
本発明による方法を適用するために、関連するすべての事象が様々な事象クラスに格付けされる。その際、ある事象クラスはたとえば、目下の速度に対する所定の作用に相当し、図5に実例として示されているように、その作用はディジタルマップベース内の各エッジエレメントに割り当てられている。
【0037】
次に特別な実施例として、走行時間属性をもつエッジを重みづけるための計算式について詳しく説明する。スタートエッジとターゲットエッジとの間の所要走行時間に関して最適な経路を求めるため、図2に示した対応づけと同様に、ウェイトとしてエッジに個々の走行時間が割り当てられる。この場合、あるエッジの走行時間tki は、エッジ長lki とその区間エレメントに対してとられている走行速度V(ki)から、
【0038】
【数5】
となる。
【0040】
ここで関数V(ki)は目下のエッジエレメントに対し、固有のエッジ属性(たとえば機能的な道路クラス、国の帰属等)に依存して速度が割り当てられる。
【0041】
この場合、エッジの重み付けに対し、速度によって以下のように作用が及ぼされる。分類された交通事象は、とられている速度V(ki)の直線的な変更によりエッジエレメントki に対し作用が及ぼされる:
【0042】
【数6】
この場合、ΔVc は、エッジもしくは経路区間ki における外部の事象に基づく速度変更である。このようにして目下のネット全体において、すべての他のエッジエレメントはルート探索アルゴリズムにとってその「魅力」に関して、作用を受けたエレメントよりも良好なかたちで現れる。作用を受けたネットにそれを適用した場合、エッジエレメントはそれらの新たなウェイトに基づき評価され、個々のエレメントに適切な強さで作用が及ぼされれば、従来のやり方で得られるようなものに対して代案となるエッジ列もしくは分岐ルートまたは代案ルートが得られる。
【0044】
図3の実例のネットにおいてルート探索アルゴリズムが、スタートエッジとターゲットエッジに関して時間的に最短の経路についての最適な結果として、25秒の全走行時間をもつエッジ列 k1 -> -k5 -> k6 を求めたものとする。エッジエレメントk5に対し渋滞など十分に強い作用が及ぼされると、そのエッジウェイトは図5に従って10秒〜50秒に変更される:
【0045】
【数7】
このようして時間的に最適な経路を新たに計算した後、図6に示されているように、30秒の総走行時間をもつ択一的なエッジ列 k1 -> -k2 -> -k3 -> k6 が生じる。
【0047】
次に、階層状のデータモデルにおける一貫したエッジウェイト変更について詳しく説明する。分類された交通事象に関する先に説明したエッジウェイトに作用を及ぼす方法は、はじめはもっぱら一定のネットレベル内でエッジウェイトの変更を行う。これにより、ネット全体においてただ1つの縮尺単純化レベルにおいてのみ行われる(ディジタルデータベースの階層構造の描かれた図4参照)。ルート計算のためのアルゴリズムにとって、任意の縮尺単純化レベルからのデータを使用できなければならないため、好適には外部からのネット制御により変更されたエッジウェイトコンフィグレーションが、異なる縮尺単純化の他のあらゆるレベルにおいても行われる。この場合、特定のレベルで行われた変更は、他のすべてのレベルにおいて等価もしくは首尾一貫している。
【0048】
図7には、種々の縮尺単純化レベルにおける特定のネット区間が示されている。この場合、縮尺単純化レベルの番号が大きくなるにつれて、ディジタルマップベースもしくはデータベースにおけるそのネットマッピングのネット分解能が粗くなる。その際、実例として示されている最低縮尺単純化レベルの3つのエッジエレメントk1,k2,k3 は、最高縮尺単純化レベルではただ1つのエッジエレメントk6 によって表されている。ここで、エッジエレメントk2 に対し(式(II)に従い)分類されたある事象のマッピングによって、この最低縮尺レベルにおいてエレメントがその長さについて100%に設定されるある特定のエッジウェイト変更が引き起こされると、そのような作用はそれよりも高いレベルでは、(縮尺単純化に基づき)設けられているマッピング規則にのみ応じて、長さの配分に影響を及ぼすことができる。次に高い縮尺単純化レベルにおけるエレメントk5 も、作用を受けていないレベル0のエレメントk3 を表しており、その結果、エッジウェイト変更のためにレベル1でも、エッジk2 について相応の長さの配分だけしか変更できない。
【0049】
このように、作用を及ぼすべきエッジエレメントについて付加的な属性が必要とされ、それは個々のエレメントの該当する長さの配分を設けられている縮尺単純化レベルに依存して記述するものである。したがって式(II)で記述したエッジウェイト変更のための規則は、好適には対応する係数について以下のように拡張される:
【0050】
【数8】
ここでΔlLevelj は全エッジ長のパーセントで表した長さの配分であり、これは縮尺単純化レベルjにおいて配分に応じた作用を表す。
【0052】
このように本発明による方法によれば、まえもって定められた固定的なディジタルマップベースにおいて、スタティックに設定されたエッジウェイトおよび/またはノードウェイトに汎用的な作用を及ぼすことができるようになる。考慮すべき事象は、データベースに左右されずに設定可能な影響(事象分類)を用いてそれらに作用を及ぼすので、種々の影響を想定することができる。たとえば渋滞やのろのろ運転などの交通事象によって、特定の区間が悪化する可能性がある。この場合、自立的ナビゲーションシステムは、悪化したウェイトに応じてそのような区間(たとえば高速道路における渋滞)を避け、たとえば一般国道区間を経由した迂回が可能ならば、時間的に好適な方の選択肢を指示する。
【0053】
さらに別の可能な構成として、ある特定の属性に対応する所定のネット内における特定の区間が完全に閉鎖される。たとえば重たい貨物搬送車などの車両に対し、そのようなダイナミックなナビゲーションシステムは、最大走行重量が小さすぎる区間を閉鎖することができる。それ相応に悪化させたノードウェイトによって、そのような区間はルート探索アルゴリズムにとって通行不能というようにはたらき、したがって生成された走行推奨に関してそれ相応に迂回が行われる。
【0054】
他方、たとえば特定のルートをまえもって作り出し、システムによって提案されたルートに対しそのようにして適切なやり方で影響を与える目的で、ネット内のエッジウェイトの改善を行うことも考えられる。
【0055】
本発明による方法によれば、階層状のデータモデルにおいて首尾一貫した作用を確実に与えることができる。たとえばルート探索や目的地ガイドのためのこれまで基礎としてきたアルゴリズムをそのために整合させる必要はない。それというのも、それらにとって外部からの影響はわからないからである。
【図面の簡単な説明】
【図1】 実際の道路網をマッピングするディジタルデータベースを示す図である。
【図2】 経路区間もしくはエッジとディジタルデータベースの経路区間ウェイトもしくはエッジウェイトとの対応関係を示す図である。
【図3】 ディジタルデータベースに基づく自動車のためのルートの実例を示す図であって、この場合、個々の走行時間がエッジのウェイトとして割り当てられている。
【図4】 ディジタルデータベースの階層構造を示す図である。
【図5】 交通事象の分類を示す図である。
【図6】 図3によるディジタルデータベースに基づく自動車のためのルートの実例を示す図である。
【図7】 変更されたウェイトを階層データベースにおける1つの縮尺単純化レベルから次のレベルへ一貫して受け渡す様子を示す図である。
Claims (7)
- ディジタルデータベースに基づき移動手段のために、まえもって定められたスタートポイントからまえもって定められたターゲットポイントまでのルートを決定するためのソースデータに作用を与える方法において、
前記ディジタルデータベースは、まえもって定められた経路区間kiを、それら個々の経路区間kiを相互に結ぶ相応に割り当てられたノードポイントniとともに有しており、前記の経路区間kiおよび/またはノード区間niに個々のウェイトgiが割り当てられていて、
該ウェイトgiを外部の事象に依存して変更してから、ルート探索アルゴリズムによってルートを決定し、
前記ウェイトgiは経路区間kiの走行時間tkiであり式
ルートを決定するためのソースデータに作用を与える方法。 - ディジタルデータベースに基づき移動手段のために、まえもって定められたスタートポイントからまえもって定められたターゲットポイントまでのルートを決定するためのソースデータに作用を与える方法において、
前記ディジタルデータベースは、まえもって定められた経路区間kiを、それら個々の経路区間kiを相互に結ぶ相応に割り当てられたノードポイントniとともに有しており、前記の経路区間kiおよび/またはノード区間niに個々のウェイトgiが割り当てられていて、
該ウェイトgiを外部の事象に依存して変更してから、ルート探索アルゴリズムによってルートを決定し、
前記ウェイトgiは経路区間kiの走行時間tkiであり、前記データベースは階層状に構成されていて、変更されたウェイトtki neuを式
ルートを決定するためのソースデータに作用を与える方法。 - 前記ルート探索アルゴリズムは、前記ウェイトgiの合計が最小となるようにルートを決定する、請求項1または2記載の方法。
- 前記ウェイトgiを変更するためのデータをデータソースが供給し、該データをデータシンクにおいて処理する、請求項1から3のいずれか1項記載の方法。
- 前記データソースは、交通メッセージ用の受信機、イベントデータバンクおよび/またはデータベースに交通メッセージをマッピングするデータバンクである、請求項4記載の方法。
- 前記データシンクは、ナビゲーションシステムにおけるナビゲーションコンピュータ内で交通メッセージデータを処理するソフトウェアである、請求項4または5記載の方法。
- 前記の外部の事象を、データソースおよび/または所定のウェイト変更のためのデータシンクによって分類する、請求項4から6のいずれか1項記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19829538.3 | 1998-07-02 | ||
| DE19829538A DE19829538A1 (de) | 1998-07-02 | 1998-07-02 | Verfahren zur Beeinflussung von Quelldaten zur Bestimmung einer Route bei einem Navigationssystem |
| PCT/DE1999/001221 WO2000002010A1 (de) | 1998-07-02 | 1999-04-23 | Verfahren zur beeinflussung von quelldaten zur bestimmung einer route bei einem navigationssystem |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002519683A JP2002519683A (ja) | 2002-07-02 |
| JP4358440B2 true JP4358440B2 (ja) | 2009-11-04 |
Family
ID=7872730
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000558357A Expired - Fee Related JP4358440B2 (ja) | 1998-07-02 | 1999-04-23 | ナビゲーションシステムにおけるルート決定のためのソースデータに作用を与える方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6633812B1 (ja) |
| EP (1) | EP1092127B2 (ja) |
| JP (1) | JP4358440B2 (ja) |
| DE (2) | DE19829538A1 (ja) |
| WO (1) | WO2000002010A1 (ja) |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10061044C2 (de) | 2000-12-08 | 2002-10-31 | Bosch Gmbh Robert | Verfahren zum automatischen Löschen einer Verkehrsmeldung |
| DE10061865C2 (de) * | 2000-12-12 | 2002-10-24 | Deutsch Zentr Luft & Raumfahrt | Verfahren zur Repräsentation eines örtlichen und zeitlichen Ablaufs der Bewegung eines Objekts oder Subjekts |
| DE10137632A1 (de) * | 2001-08-03 | 2003-02-27 | Daimler Chrysler Ag | Verfahren und System zum Auffinden eines Ortes in einer digitalen Karte |
| DE10311516A1 (de) * | 2003-03-17 | 2004-09-30 | Robert Bosch Gmbh | Verfahren zur Fahrtroutenberechnung in einem Navigationssystem |
| DE10340818A1 (de) * | 2003-09-04 | 2005-03-31 | Robert Bosch Gmbh | Navigationseinrichtung und Verfahren zur Ermittlung einer Route |
| ATE347089T1 (de) * | 2004-05-27 | 2006-12-15 | Delphi Tech Inc | Kraftfahrzeugnavigationsgerät |
| US7158876B2 (en) * | 2004-08-13 | 2007-01-02 | Hubert W. Crook Computer Consultants, Inc. | Automated vehicle routing based on physical vehicle criteria |
| US20060161335A1 (en) * | 2005-01-14 | 2006-07-20 | Ross Beinhaker | Routing system and method |
| US20060161337A1 (en) * | 2005-01-19 | 2006-07-20 | Ping-Chung Ng | Route planning process |
| US7809500B2 (en) * | 2005-02-07 | 2010-10-05 | Microsoft Corporation | Resolving discrepancies between location information and route data on a navigation device |
| US7698061B2 (en) * | 2005-09-23 | 2010-04-13 | Scenera Technologies, Llc | System and method for selecting and presenting a route to a user |
| US20070208498A1 (en) * | 2006-03-03 | 2007-09-06 | Inrix, Inc. | Displaying road traffic condition information and user controls |
| US7899611B2 (en) * | 2006-03-03 | 2011-03-01 | Inrix, Inc. | Detecting anomalous road traffic conditions |
| US8700296B2 (en) | 2006-03-03 | 2014-04-15 | Inrix, Inc. | Dynamic prediction of road traffic conditions |
| US7912628B2 (en) | 2006-03-03 | 2011-03-22 | Inrix, Inc. | Determining road traffic conditions using data from multiple data sources |
| US7702456B2 (en) | 2006-04-14 | 2010-04-20 | Scenera Technologies, Llc | System and method for presenting a computed route |
| DE102006035878A1 (de) * | 2006-08-01 | 2008-02-14 | Atlas Elektronik Gmbh | Verfahren zur Bestimmung eines Fahrwegs für ein Unterwasserfahrzeug |
| US7774734B2 (en) * | 2006-11-06 | 2010-08-10 | Microsoft Corporation | Enhanced reach-based graph processing using shortcuts |
| US7595815B2 (en) * | 2007-05-08 | 2009-09-29 | Kd Secure, Llc | Apparatus, methods, and systems for intelligent security and safety |
| FR2931231B1 (fr) * | 2008-05-19 | 2010-07-30 | Peugeot Citroen Automobiles Sa | Procede de guidage dynamique d'un vehicule automobile, en presence d'informations de types de trafics, et dispositif associe |
| US20090326799A1 (en) * | 2008-06-25 | 2009-12-31 | Expresspass Systems, Inc. | Distributed Route Segment Maintenance and Hierarchical Routing Based on Physical Vehicle Criteria |
| KR20110026433A (ko) * | 2008-06-25 | 2011-03-15 | 톰톰 인터내셔날 비.브이. | 주차시설 찾기를 탐지하는 내비게이션 장치 및 방법 |
| US20100057358A1 (en) * | 2008-08-28 | 2010-03-04 | TeleType Co., Inc. | Portable gps map device for commercial vehicle industry |
| US20120047087A1 (en) | 2009-03-25 | 2012-02-23 | Waldeck Technology Llc | Smart encounters |
| DE102010043315A1 (de) | 2010-11-03 | 2012-05-03 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Ermittlung von Durchfahrzeiten |
| DE102011077945A1 (de) | 2011-06-22 | 2012-12-27 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Aktualisierung einer in mehreren Generalisierungsebenen strukturierten digitalen Karte |
| US8706413B2 (en) | 2011-10-17 | 2014-04-22 | Qualcomm Incorporated | Determining a likelihood of a directional transition at a junction in an encoded routability graph description |
| DE102012200192A1 (de) * | 2012-01-09 | 2013-07-11 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Fahrzeugs |
| GB201305131D0 (en) * | 2013-03-20 | 2013-05-01 | Tomtom Dev Germany Gmbh | Methods and systems for detecting a closure of a navigable element |
| US20180366220A1 (en) * | 2017-04-27 | 2018-12-20 | General Emergency Medical Systems (GEMS) | Systems and Methods for Pre-Stationing and Regulating Access to Emergency Medical Supplies |
| US10563990B1 (en) | 2017-05-09 | 2020-02-18 | Palantir Technologies Inc. | Event-based route planning |
| FR3088716B1 (fr) * | 2018-11-16 | 2020-10-30 | Ifp Energies Now | Procede de determination d’un cumul d’intemperies sur un trajet |
| DE102019003233A1 (de) * | 2019-05-08 | 2020-11-12 | Daimler Ag | Verfahren zum Bewerten eines Frachtauftrags mittels eines Frachtauftragsbewertungssystems sowie Frachtauftragsbewertungssystem |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2637446B2 (ja) * | 1987-12-28 | 1997-08-06 | アイシン・エィ・ダブリュ株式会社 | ナビゲーション装置 |
| DE3810179C2 (de) † | 1988-03-25 | 1999-07-29 | Bosch Gmbh Robert | Rundfunkempfänger, insbesondere Fahrzeugempfänger |
| GB2237905A (en) † | 1989-10-13 | 1991-05-15 | Plessey Co Plc | Road network navigation systems |
| US5561790A (en) * | 1992-03-24 | 1996-10-01 | International Business Machines Corporation | Shortest path determination processes for use in modeling systems and communications networks |
| GB2271420A (en) † | 1992-10-07 | 1994-04-13 | Ford Motor Co | Vehicle navigation system |
| JP3045013B2 (ja) † | 1994-09-16 | 2000-05-22 | 住友電気工業株式会社 | ナビゲーション装置 |
| US5931888A (en) † | 1994-09-22 | 1999-08-03 | Aisin Aw Co., Ltd. | Navigation system for vehicles with alternative route searching capabilities |
| JP3173983B2 (ja) † | 1995-12-28 | 2001-06-04 | 松下電器産業株式会社 | 経路選出方法およびシステム |
| JP3223782B2 (ja) * | 1996-02-08 | 2001-10-29 | 三菱電機株式会社 | 車両経路算出装置 |
| DE19836485A1 (de) * | 1998-08-12 | 2000-02-17 | Bosch Gmbh Robert | Verfahren zum Bestimmen einer Route von einem Ausgangspunkt zu einem Zielpunkt auf einem Routennetz |
| US6192312B1 (en) * | 1999-03-25 | 2001-02-20 | Navigation Technologies Corp. | Position determining program and method |
| US6282486B1 (en) * | 2000-04-03 | 2001-08-28 | International Business Machines Corporation | Distributed system and method for detecting traffic patterns |
-
1998
- 1998-07-02 DE DE19829538A patent/DE19829538A1/de not_active Withdrawn
-
1999
- 1999-04-23 DE DE59911146T patent/DE59911146D1/de not_active Expired - Lifetime
- 1999-04-23 EP EP99927713A patent/EP1092127B2/de not_active Expired - Lifetime
- 1999-04-23 WO PCT/DE1999/001221 patent/WO2000002010A1/de active IP Right Grant
- 1999-04-23 US US09/720,370 patent/US6633812B1/en not_active Expired - Fee Related
- 1999-04-23 JP JP2000558357A patent/JP4358440B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE19829538A1 (de) | 2000-01-05 |
| DE59911146D1 (de) | 2004-12-30 |
| EP1092127B1 (de) | 2004-11-24 |
| US6633812B1 (en) | 2003-10-14 |
| EP1092127B2 (de) | 2010-09-15 |
| JP2002519683A (ja) | 2002-07-02 |
| EP1092127A1 (de) | 2001-04-18 |
| WO2000002010A1 (de) | 2000-01-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4358440B2 (ja) | ナビゲーションシステムにおけるルート決定のためのソースデータに作用を与える方法 | |
| EP1785696B1 (en) | Optimum route determination with tilings | |
| US6192314B1 (en) | Method and system for route calculation in a navigation application | |
| US10495463B2 (en) | Technology for sharing GPS navigation information | |
| JP3750400B2 (ja) | 交通ネットワーク経路探索方法および装置 | |
| Baum et al. | Dynamic time-dependent route planning in road networks with user preferences | |
| US6836781B2 (en) | Method for streamlined representation of roads in a geographic database | |
| CN114072870B (zh) | 生成复合路线规划地图的系统和方法 | |
| JP2014089202A (ja) | 道路網動的適応ヒエラルキーおよびルーティングのための方法およびシステム | |
| Kim et al. | Processing time-dependent shortest path queries without pre-computed speed information on road networks | |
| CN111831766A (zh) | 兴趣点搜索方法、可读存储介质和电子设备 | |
| JP2001521142A (ja) | 出発地点から目的地点までのルートを求める方法および装置 | |
| JP2001289658A (ja) | 制限運転操作を表す方法及びシステム | |
| Yang et al. | Adaptive routing considering delays due to signal operations | |
| EP3611470B1 (en) | Method and devices for determining routes for routing a vehicle | |
| US6636800B1 (en) | Method and device for computer assisted graph processing | |
| Falek et al. | Muse: Multimodal separators for efficient route planning in transportation networks | |
| KR102562381B1 (ko) | 차량 호라이즌에서 오브젝트를 컨텍스트화 하기 위한 시스템 및 방법 | |
| Li et al. | Hierarchical model of road network for route planning in vehicle navigation systems | |
| Varone et al. | Insertion heuristic for a dynamic dial-a-ride problem using geographical maps | |
| JP3237930B2 (ja) | ディジタル地図の経路シミュレーション装置 | |
| JP2004138477A (ja) | 巡回経路案内方法およびシステム | |
| US20210397192A1 (en) | Method and Device for Determining a Functional Road Class and a Most Probable Route for a Motor Vehicle | |
| JP4677767B2 (ja) | ナビゲーション装置及び情報提示方法 | |
| Blsius et al. | Memory-Restricted Routing with Tiled Map Data |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080507 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080805 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080812 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080908 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080916 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20081007 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20081015 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090213 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090708 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090806 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120814 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120814 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130814 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |