JP4337638B2 - 対地速度計測装置 - Google Patents
対地速度計測装置 Download PDFInfo
- Publication number
- JP4337638B2 JP4337638B2 JP2004167900A JP2004167900A JP4337638B2 JP 4337638 B2 JP4337638 B2 JP 4337638B2 JP 2004167900 A JP2004167900 A JP 2004167900A JP 2004167900 A JP2004167900 A JP 2004167900A JP 4337638 B2 JP4337638 B2 JP 4337638B2
- Authority
- JP
- Japan
- Prior art keywords
- transmission
- vehicle
- reception
- ground speed
- measuring device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/87—Combinations of radar systems, e.g. primary radar and secondary radar
- G01S13/874—Combination of several systems for attitude determination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/60—Velocity or trajectory determination systems; Sense-of-movement determination systems wherein the transmitter and receiver are mounted on the moving object, e.g. for determining ground speed, drift angle, ground track
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/03—Details of HF subsystems specially adapted therefor, e.g. common to transmitter and receiver
- G01S7/032—Constructional details for solid-state radar subsystems
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
3以上備えた対地速度計測装置において、
前記送受信部のうち、少なくとも3つが、前記車両の床面の一点を通る直線を中心軸とする円筒領域の外側に位置し、
該3つの送受信部それぞれを通り、各送受信部の向きと直交する3本の直線が、前記円筒領域内で相互に交わり、若しくはねじれの関係をなし、
且つ、前記送受信手段の送信部が、前記車両の床面と所定の角度を為すように構成する。
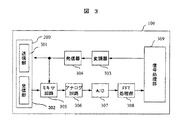
304によって発信された波が送信部301より放射される。送信部301から放射された波が路面に反射して返ってきた波は、受信部302で受信され、ミキサ回路305で周波数変換される。このミキサ回路305には、発信器304からの信号も供給されており、この2つの信号のミキシングによって発生する低周波信号がアナログ回路306へ入力される。低周波信号はアナログ回路306で増幅され、A/D変換器307によってディジタル信号に変換(A/D変換)され、FFT処理部308に供給される。A/D変換で得られたディジタルのサンプルデータをFFT処理部308で高速フーリエ変換(Fast
Fourier Transform )処理し、受信されたビート信号の全周波数帯域での周波数スペクトラムを得る。信号処理部309ではFFT処理結果に対してピーク検出処理を行い、得られたピークに対するドップラ周波数fdを用いて、次式(数1)により速度vを計測する。ここで、cは光速、ftは送信周波数を示す。
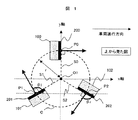
図1において、送受信手段101および102の送信方向を、送受信手段100を基準としてそれぞれθl,θrとし、各送受信手段100〜102で得られた信号に基づいて(数1)により演算した速度をそれぞれv1,v2,v3とする。ただし、各速度v1,v2,v3は、図2に示すように路面と平行な平面に対して俯角θ方向の速度成分であるため、S501で次式(数2)〜(数4)により、路面と平行な平面における速度成分に変換する。
V2=v2/cosθ (数3)
V3=v3/cosθ (数4)
次に、S502で速度V1,V2,V3を用いて、車体のz軸周りの回転角速度成分
(ヨーレイト)によって各送受信手段の出力のオフセット量(Vw)を次式(数5)により演算する。
−sinθr(V1cosθl−V3))/(sinθl(cosθr−1)
−sinθr(cosθl−1)) (数5)
ここで、角速度をwとすると、Vw=rwである。よって、(数5)より回転角速度
(ヨーレイト)wを求めることができる。
VL=V2−Vw (数7)
VR=V3−Vw (数8)
VF,VL,VRは、それぞれV1,V2,V3から回転速度分を差し引いた値である。
(Vx1)と呼ぶ)および車両の進行方向と逆方向の速度成分(第2のx方向速度(Vx2)と呼ぶ)を演算する。Vx1は図1において、VFと同一方向であるため、Vx1=VFとなる。
VRの前後方向の速度成分を合成したものとして次式(数9)のように表される。
そして、S506で上記Vx1およびVx2を用いて、x軸方向(車両の前後方向)速度Vxを次式(数10)により演算する。
S507では、第1のx方向速度および第2のx方向速度から、x方向速度比(Rx)を次式(数11)にしたがって演算する。
さらにS508で、車両の左右方向に相当するy方向速度(Vy)を演算する。y方向速度は、VLおよびVRのy方向速度成分の合成として(数12)により演算できるが、車両のピッチ変化(前後の傾斜)の影響を受けるため、補正する必要がある。
車両の前後の傾斜は、x方向速度比(Rx)に反映されており、Rx=1の時は前後の傾斜のない理想的な状態であり、Rx>1の場合は前方に傾斜した状態である。一方、
Rx<1の場合は、後方に傾斜した状態を意味する。したがって、次式(数13)により前記Vyを補正した値を新たにy方向速度(Vy)とする。
最後に、S509にてx方向速度(Vx)およびy方向速度(Vy)より横滑り角(β)を次式(数14)にしたがって演算する。
以上のように、車両の前後の傾斜を考慮して前後および左右方向の速度を演算することにより、車両の傾斜の影響を低減し、対地速度の精度が向上するという効果がある。
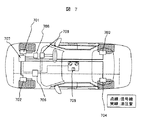
709は舵角センサであり、点線は信号線、実線は油圧管を示している。
862は信号及び/又は電力を伝送する伝送線である。
14においては送受信部902(図1における送受信部200,201,202,図3の送受信部200に相当)のみを記載して、一枚の平板のように記載しているが、実際には、送受信部ごとに当該送受信部から電波を送信するための回路等を含む送受信手段(図1の送受信手段100,101,102に相当)として構成されている。
100a,100bが形成されており、高周波回路基板1501を挿入した際に、当該基板の周辺部が当該突起100aに当接する。このとき、高周波回路基板1501に取り付けた送受信アンテナ及び一次レンズが鍔部100aの中央の開口部から突出する向きに取り付ける。また、構造体100cまたは突起100aまたは高周波回路基板1501に相互に嵌合する凸部と凹部を設けることにより、構造体100cと高周波回路基板1501との位置決めをすることができる。なお、図16の実施例においては、電源基板1601も突起100bに当節する構成とし、鍔状の突起100bの中央の開口部を通じて高周波回路基板1501を挿入したのち、電源基板1601を挿入する構成とする。電源基板
1601の挿入後、カバー1513により開口部を封止する。ここで信号線または電源線あるいはこれらの双方を外部と接続するコネクタ1505を当該カバー1513に設けることにより、比較的形状が単純な部位にコネクタを設けることが可能となるので、構造体100cの形状が複雑な場合には当該構造体100cにコネクタを設ける場合に比べて製造が容易である。
852…コントローラ、707…油圧ユニット、708…マスタシリンダ、709…舵角センサ、803,804,853,854…アクチュエータ、811,812,862…伝送線、901…筐体、902…送受信部、903…電波送信方向、904…切欠部、
905…処理部、906…接続部、1001,1101…カバー部材または底板、1102…透過部、1103…カバー部材。
Claims (13)
- 波を送信する送信部と、当該送信部から送信された波の反射波を受信する受信部とを有する送受信部を3以上備え、車両に搭載される対地速度計測装置であって、
前記送受信部のうち少なくとも3つを前記車両の床面と平行な平面に対して投影してなるそれぞれの投影部が、前記車両の床面と平行な平面に投影した投影面上の一点を中心とする円の円周と交わるように、前記送受信部が配置され、
前記3つの送受信部それぞれを通り、かつ該送信部から送信されるそれぞれの送信波を前記投影面に投影した際の方向と直交する3本の直線が、前記円の領域内で相互に交わる関係をなし、
且つ、前記送信波の方向が前記車両の床面と平行な平面に対して路面側方向に、0度より大きい角度を為すように、前記送信部が備えられることを特徴とする対地速度計測装置。 - 請求項1記載の対地速度計測装置であって、
前記3つの送受信部が、前記投影面上の一点を中心とする円上に、前記送信部のそれぞれが送出する波を前記投影面に投影した場合の当該波の進行方向が、前記円の接線方向となるように配置されることを特徴とする対地速度計測装置。 - 請求項2記載の対地速度計測装置であって、
前記3つの送受信手段を、同一の円上に配置することを特徴とする対地速度計測装置。 - 請求項3記載の対地速度計測装置であって、
前記3つの送受信部の取り付け位置が、正三角形の頂点を成すように配置することを特徴とする対地速度計測装置。 - 請求項1記載の対地速度計測装置であって、
前記3つの送受信部を、同一の筐体に設置したことを特徴とする対地速度計測装置。 - 請求項5記載の対地速度計測装置であって、
前記筐体は、前記車両に取り付けたときに路面に相対する面に切欠部を有し、該切欠部から前記送受信部が露出する構造であることを特徴とする対地速度計測装置。 - 請求項5記載の対地速度計測装置であって、
前記筐体内部に、前記送受信部が送信する波を発振する、及び/または、送受信信号を処理する処理部を備え、
前記筐体の外壁に前記処理部の信号線及び/または電力線を前記車両と接続する接続部を設けることを特徴とする対地速度計測装置。 - 波を送信する送信部と、前記送信部から送信された波の反射波を受信する受信部とを有する送受信部を、3つ以上備えた対地速度計測装置であって、
前記送信部は前記波が送信されるアンテナ面を有し、
上記送受信部のうち、少なくとも3つの取り付け位置が、正三角形の頂点を成し、
該3つの送信部のそれぞれのアンテナ面が前記正三角形に外接する円の接線方向に対してそれぞれ垂直となるように、前記送受信部が配置され、
且つ、該3つの送受信部のうちの少なくとも一つのアンテナ面が、車両の前方を向いており、
さらに、前記アンテナ面の法線方向が前記車両の床面と平行な平面に対して路面側方向に、0度より大きい角度を為すように、前記送信部が備えられることを特徴とする対地速度計測装置。 - 波を送信する送信部と、当該送信部から送信された波の反射波を受信する受信部とを有する送受信手段の、車両への取り付け方法であって、
3以上の前記送受信手段を、
前記送受信手段のうち少なくとも3つを前記車両の床面と平行な平面に対して投影してなるそれぞれの投影部が、前記車両の床面と平行な平面に投影した投影面の一点を中心とする円の円周と交わるように、前記送受信手段が配置され、
該3つの送受信手段それぞれを通り、かつ前記送信部から送信されるそれぞれの送信波を前記投影面に投影した際の方向と直交する3本の直線が、前記円の領域内で相互に交わる関係をなし、
且つ、前記送信波の進行方向が前記車両の床面と平行な平面に対して路面側方向に、0度以上の角度を為すように、前記送受信手段の送信部が、車両に取り付けられることを特徴とする送受信手段の取り付け方法。 - 請求項9記載の送受信手段の車両への取り付け方法であって、
前記3つの送受信部が、前記投影面上の一点を中心とする円上に、前記送信部のそれぞれが送出する波を前記投影面に投影した場合の当該波の進行方向が、前記円の接線方向となるように取り付けることを特徴とする送受信手段の車両への取り付け方法。 - 請求項10記載の送受信手段の車両への取り付け方法であって、
前記3つの送受信手段を、前記同一の円上に配置することを特徴とする送受信手段の車両への取り付け方法。 - 請求項11記載の送受信手段の車両への取り付け方法であって、
前記3つの送受信手段が、正三角形の頂点を成すように配置することを特徴とする送受信手段の車両への取り付け方法。 - 請求項9記載の送受信手段の車両への取り付け方法であって、
前記3つの送受信部を、同一の筐体に設置した後、該筐体を前記車両に取り付けることを特徴とする、送受信手段の車両への取り付け方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004167900A JP4337638B2 (ja) | 2003-06-30 | 2004-06-07 | 対地速度計測装置 |
| US10/872,457 US7372395B2 (en) | 2003-06-30 | 2004-06-22 | Ground-speed measuring apparatus |
| DE602004012025T DE602004012025T2 (de) | 2003-06-30 | 2004-06-29 | Anordnung zum Bestimmen der Grundgeschwindigkeit |
| EP04015213A EP1494045B1 (en) | 2003-06-30 | 2004-06-29 | Ground-speed measuring apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003186083 | 2003-06-30 | ||
| JP2004167900A JP4337638B2 (ja) | 2003-06-30 | 2004-06-07 | 対地速度計測装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005037374A JP2005037374A (ja) | 2005-02-10 |
| JP4337638B2 true JP4337638B2 (ja) | 2009-09-30 |
Family
ID=33436456
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004167900A Expired - Fee Related JP4337638B2 (ja) | 2003-06-30 | 2004-06-07 | 対地速度計測装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7372395B2 (ja) |
| EP (1) | EP1494045B1 (ja) |
| JP (1) | JP4337638B2 (ja) |
| DE (1) | DE602004012025T2 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4337638B2 (ja) * | 2003-06-30 | 2009-09-30 | 株式会社日立製作所 | 対地速度計測装置 |
| JP2006337025A (ja) * | 2005-05-31 | 2006-12-14 | Hitachi Ltd | 絶対速度計測装置 |
| DE102007031863A1 (de) * | 2007-07-04 | 2009-01-08 | Siemens Ag | Radareinrichtung |
| DE102008038615A1 (de) * | 2007-09-18 | 2009-03-19 | Continental Teves Ag & Co. Ohg | Sensoreinrichtung und Verfahren zum Erfassen der Bewegung eines Fahrzeugs |
| JP5694294B2 (ja) * | 2009-04-29 | 2015-04-01 | コーニンクレッカ フィリップス エヌ ヴェ | 車両用電子安定プログラムのための、レーザダイオードをベースにした自己混合センサ |
| KR101734354B1 (ko) * | 2009-04-29 | 2017-05-11 | 코닌클리케 필립스 엔.브이. | 차량 동역학의 특징화를 위한 레이저 다이오드 기반 다중 빔 레이저 스폿 이미징 시스템 |
| US20120162634A1 (en) * | 2009-07-22 | 2012-06-28 | Continental Teves Ag & Co. Ohg | Speed sensor |
| US9506944B2 (en) * | 2010-11-03 | 2016-11-29 | Koninklijke Philips N.V. | Velocity determination apparatus |
| JP2014029265A (ja) * | 2012-07-31 | 2014-02-13 | Hitachi Automotive Systems Ltd | 速度計測装置 |
| JP2014169949A (ja) * | 2013-03-05 | 2014-09-18 | Hitachi Automotive Systems Ltd | 速度計測装置 |
| JP6304257B2 (ja) * | 2013-09-12 | 2018-04-04 | パナソニック株式会社 | レーダ装置、車両及び移動体速度検出方法 |
| JP6421935B2 (ja) * | 2015-03-31 | 2018-11-14 | パナソニックIpマネジメント株式会社 | 車両移動推定装置および車両移動推定方法 |
| US10935670B2 (en) * | 2018-03-28 | 2021-03-02 | Psionic, Llc | Navigation system for GPS denied environments |
| CN111436040B (zh) * | 2019-10-29 | 2022-07-22 | 珠海市杰理科技股份有限公司 | 三角定位、寻回蓝牙设备的方法、蓝牙设备及定位系统 |
| CN111436020B (zh) * | 2019-10-29 | 2022-07-22 | 珠海市杰理科技股份有限公司 | 蓝牙定位、寻找蓝牙设备的方法、蓝牙设备及定位系统 |
| WO2024180582A1 (ja) * | 2023-02-27 | 2024-09-06 | 三菱電機株式会社 | 位置姿勢標定装置、位置姿勢標定方法、及び位置姿勢標定プログラム |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5322232B2 (ja) * | 1972-12-07 | 1978-07-07 | ||
| JPS6045377B2 (ja) * | 1976-08-03 | 1985-10-09 | 日産自動車株式会社 | 衝突防止装置 |
| US4517566A (en) * | 1982-09-07 | 1985-05-14 | John H. Bryant | True ground speed sensor |
| GB2245445A (en) | 1990-06-18 | 1992-01-02 | Philips Electronic Associated | Method of and apparatus for obtaining vehicle heading information |
| JP3237034B2 (ja) * | 1993-05-25 | 2001-12-10 | アイシン精機株式会社 | 車載用超音波計測装置 |
| JP2778619B2 (ja) | 1994-06-09 | 1998-07-23 | 東日本旅客鉄道株式会社 | 鉄道車両用非接触速度計測装置 |
| US6097671A (en) * | 1998-05-21 | 2000-08-01 | Rowe-Deines Instruments | Pinwheel transducer array |
| JPH11352225A (ja) | 1998-06-11 | 1999-12-24 | Furuno Electric Co Ltd | 速度測定装置 |
| DE19860633A1 (de) * | 1998-12-29 | 2000-07-06 | Valeo Schalter & Sensoren Gmbh | Verfahren zum Messen der Geschwindigkeit eines Fahrzeugs |
| GB9923718D0 (en) | 1999-10-08 | 1999-12-08 | Jaguar Cars | Radar-based own motor vehicle movement sensor system |
| JP2004216954A (ja) * | 2003-01-10 | 2004-08-05 | Hitachi Ltd | 車両の走行制御装置 |
| JP4337638B2 (ja) * | 2003-06-30 | 2009-09-30 | 株式会社日立製作所 | 対地速度計測装置 |
-
2004
- 2004-06-07 JP JP2004167900A patent/JP4337638B2/ja not_active Expired - Fee Related
- 2004-06-22 US US10/872,457 patent/US7372395B2/en not_active Expired - Fee Related
- 2004-06-29 DE DE602004012025T patent/DE602004012025T2/de not_active Expired - Lifetime
- 2004-06-29 EP EP04015213A patent/EP1494045B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP1494045A2 (en) | 2005-01-05 |
| US20070159381A1 (en) | 2007-07-12 |
| DE602004012025D1 (de) | 2008-04-10 |
| JP2005037374A (ja) | 2005-02-10 |
| US7372395B2 (en) | 2008-05-13 |
| EP1494045A3 (en) | 2005-01-19 |
| EP1494045B1 (en) | 2008-02-27 |
| DE602004012025T2 (de) | 2009-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4337638B2 (ja) | 対地速度計測装置 | |
| US7325454B2 (en) | Acceleration/angular velocity sensor unit | |
| US7373227B2 (en) | Integrated sensing system | |
| US6782315B2 (en) | Method and apparatus for compensating misalignments of a sensor system used in a vehicle dynamic control system | |
| US7136736B2 (en) | Vehicular travel control device | |
| KR101216446B1 (ko) | 차륜 차량 내의 측정 장치를 모니터링하는 방법 및 배열체 | |
| US8363211B2 (en) | Sensor device and method for detecting the motion of a vehicle | |
| US20050203705A1 (en) | Vehicle driving control device and vehicle control unit | |
| CN102414576B (zh) | 用于车辆电子稳定程序的基于激光二极管的自混合传感器 | |
| JP2006337025A (ja) | 絶対速度計測装置 | |
| JPH11316117A (ja) | 車両の軸距の測定方法及びその装置 | |
| JP2005505753A (ja) | 方向性車両速度を定める方法 | |
| WO2019065439A1 (ja) | レーダー装置及び物標検出方法 | |
| TWI690717B (zh) | 機車雷達偵測系統 | |
| JP2006131116A (ja) | 車両駆動制御システム及びセンサユニット並びにタイヤ | |
| JP2005035523A (ja) | 車両駆動制御システム及びそのセンサユニット | |
| JP2008209242A (ja) | 対地車速計測装置 | |
| JP3979931B2 (ja) | 物標速度算出装置及びこれを使用する車両制御装置 | |
| KR20040044034A (ko) | 차량용 통합 센서 시스템 | |
| JP2000035331A (ja) | 車両用標高計 | |
| JP2580862B2 (ja) | ドップラ型対地車体速度検出装置 | |
| WO2001027653A1 (en) | Radar-based own motor vehicle movement sensor system | |
| CN220290073U (zh) | 一种无人驾驶汽车用集成式传感控制器 | |
| JPH11183504A (ja) | 車載加速度計測装置 | |
| CN115135519A (zh) | 通过分布式布置的传感器确定车辆的动力学量 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20060427 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060726 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080912 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090609 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090622 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120710 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120710 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120710 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |