JP4165779B2 - 電動式変速装置における変速軸のニュートラル位置決定方法 - Google Patents
電動式変速装置における変速軸のニュートラル位置決定方法 Download PDFInfo
- Publication number
- JP4165779B2 JP4165779B2 JP21194098A JP21194098A JP4165779B2 JP 4165779 B2 JP4165779 B2 JP 4165779B2 JP 21194098 A JP21194098 A JP 21194098A JP 21194098 A JP21194098 A JP 21194098A JP 4165779 B2 JP4165779 B2 JP 4165779B2
- Authority
- JP
- Japan
- Prior art keywords
- shift
- angle
- neutral position
- time
- transmission shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
























Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/68—Inputs being a function of gearing status
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/68—Inputs being a function of gearing status
- F16H2059/6823—Sensing neutral state of the transmission
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H61/32—Electric motors , actuators or related electrical control means therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/08—Multiple final output mechanisms being moved by a single common final actuating mechanism
- F16H63/16—Multiple final output mechanisms being moved by a single common final actuating mechanism the final output mechanisms being successively actuated by progressive movement of the final actuating mechanism
- F16H63/18—Multiple final output mechanisms being moved by a single common final actuating mechanism the final output mechanisms being successively actuated by progressive movement of the final actuating mechanism the final actuating mechanism comprising cams
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20012—Multiple controlled elements
- Y10T74/20018—Transmission control
- Y10T74/20177—Particular element [e.g., shift fork, template, etc.]
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Gear-Shifting Mechanisms (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Control Of Transmission Device (AREA)
Description
【発明の属する技術分野】
本発明は、ギアシフトおよびクラッチの断続を電気的に行なう電動式変速装置における変速軸のニュートラル位置決定方法に係り、特に、駆動モータによって揺動される変速軸の揺動方向および揺動角度に基づいて、所定の変速制御を実行する電動式変速装置における変速軸のニュートラル位置決定方法に関する。
【0002】
【従来の技術】
クラッチペダル(あるいはクラッチレバー)およびシフトチェンジレバーの双方を操作してギアシフトを行なう従来の変速装置に対して、ギアシフトをモータの動力を利用して行なう電動式変速装置が、特開平5−39865号公報に開示されている。これに対して、クラッチの断続もモータにより同時に行なうことが考えられる。
【0003】
この場合は、駆動モータによって変速軸を回動し、変速軸と連動してクラッチの断続を制御すると共に、変速軸と連動するシフトドラムおよびシフトフォークを介してスリーブをメーンシャフト上で駆動し、前記スリーブを予定のギアに係合させて変速段を確立する。
【0004】
【発明が解決しようとする課題】
クラッチの断続やシフトドラム等の回動を変速軸と連動させる場合、その動作タイミングは変速軸の回転角度に基づいて決定する必要があるので、変速軸の回転角度を正確に検知する必要がある。
【0005】
ここで、変速軸の回転位置を、変速軸の揺動中心位置すなわちニュートラル位置からの相対的な回転角度で代表させようとすると、変速軸がニュートラル位置にあるときの角度センサの出力電圧が所定値を示すように、角度センサの取付け、あるいは角度センサと変速軸との連結等を正確に行わなければならない。
【0006】
さらに、角度センサ等を正確に取り付けることができたとしても、経年劣化によって角度センサの感度が変化してしまうと、変速軸の回転位置を正確に検知することができなくなってしまう。
【0007】
本発明の目的は、上記した従来技術の課題を解決し、複雑な組立て作業を必要とせずに変速軸の回転位置を正確に検知することが可能な電動式変速装置における変速軸のニュートラル位置決定方法を提供することにある。
【0008】
【課題を解決するための手段】
上記した目的を達成するために、本発明では、駆動モータによって一方側または他方側に揺動される変速軸と、前記変速軸の回転角度を検知する角度センサとを具備し、前記変速軸のニュートラル位置からの揺動方向および揺動角度に基づいて所定の変速制御を実行する電動式変速装置における変速軸のニュートラル位置決定方法において、以下のような手段を講じた点に特徴がある。
(1) 一方側または他方側の回動限界まで揺動された変速軸の各回転角度をそれぞれ検知し、各回転角度の中間点を変速軸のニュートラル位置として更新登録する。
(2) 一方側または他方側の回動限界まで揺動された変速軸の各回転角度をそれぞれ検知し、前記検知された各回転角度が、それぞれ一方側または他方側許容範囲内にあるか否かを判定し、前記各回転角度がそれぞれ各許容範囲内にあれば、各回転角度を、それぞれ一方側または他方側最大角度として更新登録すると共に、前記一方側または他方側許容範囲を縮小し、前記各回転角度がそれぞれ前記一方側または他方側許容範囲内になければ、当該一方側または他方側許容範囲を拡大し、前記一方側および他方側最大角度の中間を変速軸のニュートラル位置として更新登録する。
【0009】
上記した構成(1) によれば、変速軸が一方側または他方側の回動限界まで揺動されれば、その際の変速軸の各回転角度に基づいて変速軸のニュートラル位置が求められるので、常に正確なニュートラル位置を求められる。
【0010】
上記した構成(2) によれば、変速軸のニュートラル位置検知が進ほど許容範囲が狭まるので、ノイズ等の影響を受けて狂った回転角度が入力されても、これを除去することができる。さらに、許容範囲を越える回転角度が検知されるごとに前記許容範囲が徐々に広げられるので、許容範囲を越える回転角度が真の回転角度である場合でも、これが除去され続けることはない。
【0011】
【発明の実施の形態】
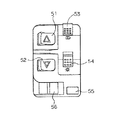
以下、図面を参照して本発明を詳細に説明する。図1は、本発明の電動式変速装置が搭載される車両の操作部の平面図である。
【0012】
操作部には、電動変速用のシフトアップスイッチ51およびシフトダウンスイッチ52と、前照灯の向きを切り換えるディマースイッチ53と、前照灯の点灯/非点灯を切り換えるライティングスイッチ54と、エンジンのスタートスイッチ55およびストップスイッチ56とが設けられている。本実施形態では、前記各シフトスイッチ51、52を押下してオン操作するごとに、シフトポジションがそれぞれ1段づつ上下にシフトする。
【0013】
図2は、本発明の一実施形態である電動式変速装置の駆動系の主要部の構成を示した部分断面図である。
【0014】
電気アクチュエータとしての駆動モータ1は、減速ギア機構2を介してシフトスピンドル3を正逆転方向へ回動させる。シフトスピンドル3(変速軸)の回転位置(角度)は、その一端に設けられたアングルセンサ28によって検知される。シフトスピンドル3から垂直に伸びたクラッチアーム6の一端には、シフトスピンドル3の回転運動を直進運動に変換する変換機構8が設けられている。変換機構8は、駆動モータ1によってシフトスピンドル3がニュートラル位置から回動されると、その回動方向とは無関係に、変速クラッチ5の接続を回動過程で解除し、再びニュートラル位置まで逆向きに回動される過程で接続状態に戻す。クラッチアーム6および変換機構8は、シフトスピンドル3が予定角度(例えば、±6度)まで回動された時点で変速クラッチ5の接続が解除されるように構成されている。
【0015】
シフトスピンドル3に固定されたマスターアーム7の一端は、シフトドラム軸8に設けられたクラッチ機構9と係合し、駆動モータ1によってシフトスピンドル3が回動されると、その回動方向に応じた方向へシフトドラム10を回動させる。マスターアーム7およびクラッチ機構9は、シフトスピンドル3がニュートラル位置からいずれかの方向へ回動されたときはシフトスピンドル3と係合してシフトドラム10を回動し、ニュートラル位置へ戻る方向へ回動されたときは、係合状態を解除してシフトドラム10を当該位置にとどめるようなクラッチ機構を構成する。
【0016】
各シフトフォーク11の先端は、図4に関して後述する各スリーブ30の外周溝31に係合し、シフトドラム10の回動に応じて各シフトフォーク11が軸方向に平行移動されると、シフトドラム10の回転方向および回転角度に応じて、いずれかのスリーブがメーンシャフト4上で平行移動する。
【0017】
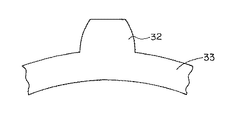
図4は、前記スリーブ30の斜視図であり、メーンシャフト(図示省略)に対して軸方向に摺動可能な状態で挿貫されている。スリーブ30の外周側面には、前記シフトフォーク11の先端が係合される溝31が円周方向に沿って形成されている。スリーブ30の軸穴の外周部には、図5に関して後述するギア40の凹側ダボ42と係合する複数の凸側ダボ32が、環状フランジ33と共に一体的に形成されている。
【0018】
図5は、前記ギア40の斜視図であり、メーンシャフト(図示省略)上の所定位置に回転自在に軸支されている。ギア40の軸穴の外周部には、前記スリーブ30の凸側ダボ32と係合する複数の凹側ダボ42が、環状フランジ43と一体的に形成されている。図3は、前記スリーブ30およびギア40が各ダボ32、42によって相互に係合した状態を示した概念図である。
【0019】
一方、図9、10は、それぞれ従来のスリーブ38およびギア48の斜視図であり、スリーブ38では、複数の凸側ダボ39が、ギアの軸穴と同軸状にそれぞれ独立して設けられている。しかしながら、各凸側ダボ39を独立的に構成しようとすると、十分な強度を確保するためには各凸側ダボ39の底面積を比較的大きくしなければならない。このため、従来技術では凸側ダボ39およびギア40のダボ穴49の回転方向に関する幅の占める割合が大きくなり、凸側ダボ39は、図示したように、4つ程度を設けていた。
【0020】
図12は、従来のスリーブ38の凸側ダボ39とギア48のダボ穴49との相対的な位置関係を模式的に表現した図であり、ダボ穴49の回転方向の幅D2は凸側ダボ39の幅D1の約2倍程度であった。このため、凸側ダボ39がダボ穴49内に係合(ダボイン)できない期間Taが、ダボインできる期間Tbに比べて長かった。
【0021】
これに対して、本実施形態では各凸側ダボ32が環状フランジ33によって一体的に形成されているので、図13に示したように、十分な強度を保ったまま凸側ダボ32の回転方向の幅D3およびギア40の凹側ダボ42の幅D4を十分に短くすることができる。このため、凸側ダボ32をダボ穴46にダボインできない期間Taを、ダボインできる期間Tbに比べて短くすることができ、ダボインできる確率を向上させることが可能になる。
【0022】
また、本実施形態では、ダボ穴46の回転方向の幅D5と凸側ダボ32の幅D3との差を狭くすることができるので、両者の係合後における遊びを小さくすることができ、変速ショックや変速ノイズの低減が可能になる。
【0023】
さらに、本実施形態では、図6に示したように、凸側ダボ32のテーパを凸状に湾曲させる一方で、図7に示したように、凹側ダボ42のテーパを直線状にしたので、図8に示したように、各ダボ32、42を軸方向に線接触させることができる。このため、応力の集中を防止することができ、ダボ強度を実質的に向上させると共に、耐久性や耐摩耗性の向上が可能になる。
【0024】
このような構成において、前記スリーブ30がシフトフォーク11によって予定位置まで平行移動され、スリーブ30の凸側ダボ32がギア40のダボ穴46にダボインすると、良く知られるように、メーンシャフト4に対して空転状態で支持されていたギアがスリーブによって当該メーンシャフト4に係合されて同期回転する。この結果、クラッチシャフトからカウンタシャフト(共に図示せず)に伝達された回転力が、当該ギアを介してメーンシャフト4に伝達される。
【0025】
なお、図示は省略するが、本発明の電動式変速装置が搭載される車両のエンジンは4サイクルであり、クランクシャフトからメインシャフトへの動力伝達系には、クランク軸上の遠心クラッチおよびメインシャフト上のクラッチを介してエンジンの動力が伝達される。したがって、エンジン回転数が所定値以下の場合は、遠心クラッチがメインシャフト上のクラッチへの動力伝達をカットしており、車両停止中であればギアを何速へもシフトすることが可能になる。
【0026】
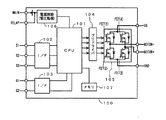
図14は、本発明の一実施形態である電動式変速装置の制御系の主要部の構成を示したブロック図であり、図15は、図14に示したECU100の構成例を示したブロック図である。
【0027】
図14において、ECU100のMOTOR(+)端子およびMOTOR(−)端子には前記駆動モータ1が接続され、センサ信号端子S1,S2,S3には、それぞれ車速を検知する車速センサ26、エンジン回転数を検知するNe センサ27および前記シフトスピンドル3の回転角度を検知する前記アングルセンサ28が接続されている。変速指令端子G1,G2には、前記シフトアップスイッチ51およびシフトダウンスイッチ52が接続されている。
【0028】
バッテリ21は、メインヒューズ22、メインスイッチ23およびヒューズボックス24を介してECU100のMAIN端子に接続されると共に、フェールセーフ(F/S)リレー25およびヒューズボックス24を介してVB端子にも接続されている。フェールセーフ(F/S)リレー25の励磁コイル25aはRELAY端子に接続されている。
【0029】
ECU100内では、図15に示したように、前記MAIN端子およびRELAY端子が電源回路106に接続され、電源回路106はCPU101に接続されている。前記センサ信号端子S1,S2,S3は、インターフェース回路102を介してCPU101の入力端子に接続されている。前記変速指令端子G1,G2は、インターフェース回路103を介してCPU101の入力端子に接続されている。
【0030】
スイッチング回路105は、それぞれ直列接続されたFET▲1▼,FET▲2▼およびFET▲3▼,FET▲4▼を相互に並列接続して構成され、並列接続の一端は前記VB端子に接続され、他端はGND端子に接続されている。FET▲1▼,FET▲2▼の接続点はMOTOR(−)端子に接続され、FET▲3▼,FET▲4▼の接続点はMOTOR(+)端子に接続されている。各FET▲1▼〜FET▲4▼は、CPU101によってプリドライバ104を介して選択的にPWM制御される。CPU101は、メモリ107に記憶された制御アルゴリズムに基づいて各FET▲1▼〜FET▲4▼を制御する。
【0031】
次いで、本発明の電動変速装置による変速制御方法を、図16〜22のフローチャートおよび図23の動作タイミングチャートを参照して説明する。
【0032】
ステップS10では、いずれかのシフトスイッチがオン操作されたか否かが判定され、オン操作されたと判定されると、ステップS11では、オン操作されたシフトスイッチが、シフトアップスイッチ51およびシフトダウンスイッチ52のいずれであるかが判定される。ここで、シフトアップスイッチ51がオン操作されたと判定されるとステップS13へ進み、シフトダウンスイッチ52がオン操作されたと判定されると、ステップS12において、エンジン回転数Ne を変数Ne1として記憶した後にステップS13へ進む。
【0033】
ステップS13では、オン操作されたシフトスイッチに応じて、ECU100内の前記スイッチング回路105を構成する各FETが、図23の時刻t1 から選択的にPWM制御される。すなわち、シフトアップスイッチ51がオン操作されていれば、FET▲1▼、▲3▼を遮断したまま、FET▲4▼が導通され、FET▲2▼が100%のデューティー比でPWM制御される。この結果、駆動モータ1はシフトアップ方向への回動を開始し、これに連動してシフトスピンドル3も、ニュートラル位置からシフトアップ方向への回動を開始する。
【0034】
一方、シフトダウンスイッチ52がオン操作されていれば、FET▲2▼、▲4▼を遮断したまま、FET▲1▼が導通され、FET▲3▼が100%のデューティー比でPWM制御される。この結果、駆動モータ1は、前記シフトアップ方向とは逆向きのシフトダウン方向へ回動を開始し、これに連動してシフトスピンドル3も、ニュートラル位置からシフトダウン方向への回動を開始する。
【0035】
このように、PWM制御のデューティー比を100%に設定すると、シフトスピードを速くすることができ、クラッチを素早く切り離すことができる。なお、本実施形態では、シフトスピンドル3がニュートラル位置から±5〜6度だけ回動するとクラッチが切れるように設計されている。
【0036】
ステップS14では、第1タイマ(図示せず)が計時を開始し、ステップS15では、前記シフトスピンドル3の回動角度θ0 が前記アングルセンサ28によって検知される。ステップS16では、検知された回動角度θ0 が第1基準角度θREF (本実施形態では、ニュートラル位置から±14度)を超えた(+14度以上または−14度以下;以後、単に±××度以上と表現する)か否かが判定される。
【0037】
ここで、回動角度θ0 が±14度以上と判定されると、シフトフォーク11によって平行移動されたスリーブが正規の挿嵌(ダボイン)位置まで達している可能性が高いのでステップS17へ進むが、±14度以上に達していないと、スリーブが正規の挿嵌位置まで達していないと判断できるので、後述するステップS30へ進む。
【0038】
スリーブが正規の挿嵌位置まで平行移動されことが、時刻t2 において、前記回動角度θ0 に基づいて検知されると、ステップS17では前記第1タイマがリセットされる。ステップS18では、回動中の駆動モータ1に制動をかけるために、前記スイッチング回路105の各FETが制御される。すなわち、FET▲2▼、▲3▼を遮断したまま、FET▲1▼、▲4▼が導通される。
【0039】
この結果、駆動モータ1が短絡されて回転負荷となるので、シフトスピンドル3のシフトアップ方向またはシフトダウン方向への駆動トルクに制動作用が働き、シフトスピンドル3がストッパに当接する際の衝撃を弱めることができ、強度的にもノイズ的にも有利になる。なお、ストッパに当接する際のシフトスピンドル3の回転角度は、ニュートラル位置から±18度である。
【0040】
図17のステップS19では、制動時間を規定するための第2タイマが計時を開始し、ステップS20では、第2タイマの計時時間が15msを超えたか否かが判定される。第2タイマの計時時間が15ms超えるまではステップS21へ進み、後に詳述するエンジン回転数(Ne )制御が実行される。その後、時刻t3 において、計時時間が15msを超えると、ステップS22へ進んで第2タイマがリセットされる。
【0041】
ステップS23では、オン操作されたシフトスイッチに応じて前記スイッチング回路105の各FETが選択的にPWM制御される。すなわち、シフトアップ中であれば、FET▲1▼、▲3▼を遮断したまま、FET▲4▼が導通され、FET▲2▼が70%のデューティー比でPWM制御される。一方、シフトダウン中であれば、FET▲2▼、▲4▼を遮断したまま、FET▲1▼が導通され、FET▲3▼が70%のデューティー比でPWM制御される。この結果、スリーブ30がギア40側へ比較的弱いトルクで押し付けられるので、ダボインまでに各ダボに加わる負荷が軽減されるうえ、ダボイン状態を確実に保持できるようになる。
【0042】
ステップS24では第3タイマが計時を開始し、ステップS25では、第3タイマの計時時間が70msを超えたか否かが判定される。計時時間が70msを超えていなければ、ステップS26へ進んでNe 制御が実行される。また、計時時間が70msを超えていると、ステップS27では前記第3タイマがリセットされ、ステップS28では、シフトスピンドル3のニュートラル位置(角度)θN を求めるためのニュートラル位置補正制御が実行される。ステップS29では、時刻t4 において、後述するクラッチON制御が開始される。
【0043】
なお、本実施形態における前記第3タイマのタイムアップ時間は、前記図13に関して説明した、ダボインできない期間Taに基づいて決定されている。すなわち、上記タイムアップ時間(70ms)は、少なくとも期間Taが経過する時間は押し付け制御が実行されるように設定されている。この間、スリーブ30の凸側ダボ32とギア40の凹側ダボ42とが当接されることになるが、デューティー比が70%まで減ぜられているので、各ダボに加わる負荷は小さく、強度的に有利になる。
【0044】
また、第3タイマのタイムアップ時間は固定値に限らず、例えばギアが1〜3速の範囲であれば70msでタイムアップし、4〜5速の範囲であれば90msでタイムアップするといったように、ギアの関数として可変的に設定されるようにしても良い。
【0045】
さらに、上記した実施形態ではPWM制御時のデューティー比が固定であり、スリーブ30がギア40側へ一定トルクで押し付けられるものとして説明したが、PWM制御時のデューティー比を可変制御しても良い。
【0046】
図24は、前記ステップS23において実行されるPWM制御のデューティー比の可変制御方法を示した図であり、本実施形態では、時刻t3 において押し付け制御が開始されると、初めの20mSは70%のデューティー比でPWM制御され、その後は10mSごとに50%のデューティー比および70%のデューティー比によるPWM制御が繰り返される。
【0047】
このように、スリーブ30をギア40側へ一定トルクで押し付けるのではなく、押し付けトルクを強めたり弱めたりして変動させれば、例えば70%のデューティー比に応じたトルクでスリーブ30がギア40側へ押し付けられた際に凸側ダボ32と凹側ダボ42とが当接してダボインできなかった場合でも、直ぐに押し付けトルクが50%のデューティー比に応じたトルクまで低減される。このため、各ダボに加わる負荷が小さくなって両者の相対的な回転が容易になり、良好なダボインが可能になる。
【0048】
一方、図16の前記ステップS16において、回転角度θ0 が第1基準値未満であると判定されると、当該処理は図18のステップS30へ進む。ステップS30では、前記第1タイマによる計時時間が200msを超えたか否かが判定され、初めは超えていないと判定されるので、ステップS31でNe 制御を実行した後に図16のステップS16へ戻る。
【0049】
その後、第1タイマの計時時間が200msを超え、今回のシフトチェンジが失敗に終ったと判断されると、ステップS32において第1タイマがリセットされる。ステップS33では、後述する再突入カウンタのカウント値が参照され、リセット状態(=0)であれば、再突入制御が未実行であると判断されてステップS34へ進み、後述する再突入制御が初めて実行される。これは、シフトチェンジに時間がかかると運転者に違和感を抱かせる場合があるからである。
【0050】
一方、再突入カウンタがセット状態(=1)であれば、再突入制御を実行したにもかかわらずシフトチェンジが成功しなかったものと判定され、シフトチェンジを行なうことなくクラッチを接続するためにステップS35へ進む。ステップS35では再突入カウンタがリセットされ、ステップS36では、後述するクラッチON制御が実行される。
【0051】
次いで、図19のフローチャートを参照して前記再突入制御の制御方法を説明する。再突入制御とは、シフトフォークによって軸方向へ平行移動されるスリーブ30が正規の嵌合位置まで移動できなかった場合に、移動トルクを一時的に減じた後で再び所定トルクを加えて再移動(突入)を試みる処理である。
【0052】
ステップS40では、PWM制御下にあるFET、すなわちシフトアップ中であればFET▲2▼のデューティー比が20%に減ぜられ、シフトダウン中であればFET▲3▼のデューティー比が20%に減ぜられる。この結果、シフトフォーク11によってスリーブ30に加えられる駆動トルクが弱まる。
【0053】
ステップS41では第4タイマが計時を開始し、ステップS42では、第4タイマの計時時間が20msを超えたか否かが判定される。計時時間が20msを超えていなければ、ステップS43へ進んでNe 制御が実行される。また、計時時間が20msを超えると、ステップS44では第4タイマがリセットされ、ステップS45では、前記再突入カウンタがセットされる。その後、当該処理は図16の前記ステップS13へ戻り、駆動モータ1が再び100%のデューティー比でPWM制御されるので、スリーブには当初の大きなトルクが加えられることになる。
【0054】
本実施形態では、上記したようにシフトチェンジが正常に行われないと、スリーブの押しつけトルクを一時的に弱めた後、再び強いトルクで押し付けるようにしたので、スリーブの再突入が容易に行えるようになる。
【0055】
次いで、前記ステップS28で実行されるニュートラル位置補正制御の動作を、図20のフローチャートを参照して説明する。
【0056】
ステップS60では、前記シフトスピンドル3の現在の回転角度θ0 が前記アングルセンサ28によって検知される。ステップS61では、シフトアップ中およびシフトダウン中のいずれであるかが判定され、シフトアップ中であればステップS62へ進む。
【0057】
ステップS62では、前記検知された回転角度θ0 が、ノイズ成分を含まない正規の値であるか否かを判定するために、予め登録されている許容角度下限値θUMI と許容角度上限値θUMS との間の許容角度範囲内にあるか否かが判定される。前記許容角度範囲の下限値θUMI および上限値θUMS の初期値は比較的広く設定されているので、初めは許容角度範囲内と判定されてステップS63へ進む。
【0058】
ステップS63では、前記検知された回転角度θ0 が、予め登録されているシフトアップ時の最大回転角度(アップ時最大角度)θUMと比較される。アップ時最大角度θUMの初期値は、予め前記許容角度下限値θUMI と同値に設定されているので、ここでは回転角度θ0 がアップ時最大角度θUMよりも大きいと判断されてステップS64へ進む。
【0059】
ステップS64では、前記アップ時最大角度θUMが前記回転角度θ0 に更新登録される。ステップS65では、前記下限値θUMI および上限値θUMS で定まる許容角度範囲を狭めるための補正値Wが、次式(1) に基づいて演算される。
W=
max([θ0 −下限値θUMI ],[θ0 −上限値θUMS ])/n…(1)
ここで、[a]は数値aの絶対値を求める関数を意味し、max(a,b)は数値a,数値bのうち大きい側を選択する関数を意味する。また、変数nの初期値は“2”に予め設定されている。
【0060】
ステップS66では、前記変数nが“1”だけインクリメントされる。ステップS67では、次式(2) 、(3) に基づいて前記下限値θUMI および上限値θUMS が更新登録される。
下限値θUMI =max(下限値θUMI ,θ0 −W) …(2)
上限値θUMS =min(上限値θUMS ,θ0 +W) …(3)
ここで、mim(a,b)は数値a,数値bのうち小さい側を選択する関数を意味する。上記した(1) 〜(3) 式によれば、前記検知された回転角度θ0 が、前記下限値θUMI および上限値θUMS で定まる許容角度範囲内に収まっている限り、前記許容角度範囲が徐々に狭まる。したがって、前記ステップS62において、ノイズ成分を含む回転角度θ0 を確実に除去できるようになる。
【0061】
なお、本実施形態では許容角度範囲から外れるような回転角度θ0 が検知されると、当該処理はステップS62からステップS69へ進み、前記変数nが“1”だけデクリメントされる。この結果、ステップS65で求められる補正値Wが大きくなって前記許容角度範囲が若干広がる。したがって、許容角度範囲を越える回転角度θ0 が連続的に検知されるようになると、やがて当該回転角度θ0 が許容角度範囲内となり、ステップS64においてアップ時最大角度θUMとして更新登録される。
【0062】
ステップS68では、前記ステップS64で求めたアップ時最大角度θUMと、前記ステップS61においてシフトダウン中と判定された際に上記と同様にして求められるシフトダウン時の最大回転角度(ダウン時最大角度)θDMとが次式(4) に代入されてニュートラル角度θN が求められる。
θN =(アップ時最大角度θUM+ダウン時最大角度θDM)/2 …(4)
以上のようにしてニュートラル角度θN が求められて更新登録されると、これ以後のシフトスピンドル3の回転角度制御は、前記ニュートラル角度θN を基準にして実行される。
【0063】
このように、本実施形態によればシフトスピンドル3の実際の回動範囲に基づいてニュートラル角度θN が検知されるので、組み付け誤差や経時劣化に左右されずに、常に正確なニュートラル位置を得られるようになる。
【0064】
また、本実施形態によれば、ニュートラル位置の補正が進むと、外乱によって回転角度θ0 の検出値が突発的に狂っても、当該検出値は無視されるので、外乱の有無にかかわらず正確なニュートラル位置を得られるようになる。
【0065】
さらに、許容範囲を越える回転角度が検知されるごとに許容角度範囲が徐々に広げられるので、例えば角度センサの劣化等が原因で回転角度として従来よりも大きな値が検知されるようになっても、これが狂った回転角度として除去され続けてしまうことがない。
【0066】
次いで、前記Ne 制御およびクラッチON制御の動作を詳細に説明する前に、各制御の趣旨および概略動作を、図25、26を参照して説明する。
【0067】
図23に示したように、本実施形態では、時刻t1 でシフトスピンドル3の回動を開始すると、時刻t11でクラッチの接続が解除され、時刻t3 でシフトスピンドルの回動が完了する。その後、時刻t4 まで押しつけ制御を実行した後、クラッチの接続制御へ移行する。
【0068】
このとき、変速ショックを和らげるためにはクラッチを低速で接続する、換言すればシフトスピンドル3の回転速度を遅くする必要がある。一方、変速速度はシフトスピンドル3の回転速度に依存するため、素早い変速を実現するためには、シフトスピンドル3の回転速度を早くする必要がある。
【0069】
そこで、本発明では上記した2つの条件を同時に満足すべく、図23に示したように、時刻t4 からt5 までの、クラッチ接続される角度範囲の近傍まではシフトスピンドル3を高速回転させ、時刻t5 以降の、クラッチが接続状態へ至る角度範囲ではシフトスピンドル3を低速回転させることにした。このような2段リターン制御により、本実施形態では変速ショックの低減と変速時間の短縮とを両立している。
【0070】
さらに、本実施形態では各ドライバのアクセル操作に応じて、クラッチの接続タイミングを最適なタイミングに制御している。図25、26は、それぞれシフトアップおよびシフトダウン時に実行されるクラッチON制御およびNe 制御によってシフトスピンドル位置θ0 およびエンジン回転数Ne が変化する様子を示した図である。
【0071】
図25に示したように、シフトアップ時は、アクセルを戻してシフトアップスイッチ51をオン操作し、その後、変速動作が実行されてクラッチが再接続された後でアクセルを開けることが一般的であり、その際のエンジン回転数Ne は実線aで示した通りに変化する。このとき、シフトスピンドルは実線A,Bで示した通りに制御される。
【0072】
しかしながら、ドライバによっては、アクセルを戻すことなくシフトアップスイッチ51を操作したり、クラッチが再接続される前にアクセルを開ける場合も考えられる。このような場合は、ドライバが速やかなシフトチェンジを望んでいるのでクラッチを素早く接続することが望ましい。
【0073】
そこで、本実施形態では、エンジン回転数Ne が実線bのように変化した場合には、ドライバがアクセルを戻すことなくシフトアップスイッチ51を操作したと判定し、また、エンジン回転数Ne が実線cのように変化した場合には、クラッチが接続されるタイミングよりも早くアクセルが開かれたと判定し、それぞれ、実線C,Dで示したように、クラッチを直ちに接続するクイックリターン制御を実行するようにした。
【0074】
一方、図26に示したように、シフトダウン時もアクセルを戻してシフトダウンスイッチ52をオン操作し、その後、変速動作が実行されてクラッチが再接続された後でアクセルを開けることが一般的であり、その際のエンジン回転数Ne は実線aで示した通りに変化する。このとき、シフトスピンドルは実線A,Bで示した通りに2段制御される。
【0075】
しかしながら、シフトダウン時にエンジンが空吹かしされる場合もあり、このような場合には、クラッチを素早く接続してもシフトショックが少ないので、素早くクラッチ接続することが望ましい。
【0076】
そこで、本実施形態では、エンジン回転数Ne が実線b,cのように変化した場合には、ドライバがエンジンが空吹かししたと判定し、それぞれ、実線C,Dで示したようなクイックリターン制御を実行するようにした。
【0077】
次いで、上記した2段リターン制御およびクイックリターン制御を実現するNe 制御およびクラッチON制御の動作を詳細に説明する。図21は、前記ステップS21、S26、S31、S43で実行されるNe 制御の制御方法を示したフローチャートである。
【0078】
ステップS50では、今回のエンジン回転数Ne が計測される。ステップS51では、これまでに計測されたエンジン回転数Ne のピークホールド値Nepおよびボトムホールド値Nebが、前記今回のエンジン回転数Ne に基づいて更新される。ステップS52では、シフトアップ中およびシフトダウン中のいずれであるかが判定され、シフトアップ中であればステップS56へ進み、シフトダウン中であればステップS53へ進む。
【0079】
ステップS56では、前記ステップS50で検知された今回のエンジン回転数Ne と前記ステップS51で更新されるボトムホールド値Nebとの差分(Ne −Neb)が50rpm 以上であるか否かが判定される。
【0080】
当該判定は、シフトアップ時にアクセルが閉じられているか否かの判定であり、前記差分が50rpm 以上であれば、ドライバがアクセルを戻すことなくシフトアップスイッチ51を操作したか、あるいはクラッチが接続されるタイミングよりも早くアクセルが開かれたものと判定される。この場合は、クラッチを直ちに接続すべくステップS55へ進み、クイックリターンフラグFをセットした後に当該処理を終了する。また、差分が50rpm 未満であれば、通常の制御を継続すべく、クイックリターンフラグFをセットすることなく、当該エンジン回転数制御を終了する。
【0081】
一方、前記ステップS52においてシフトダウン中と判定されると、ステップS53では、前記今回のエンジン回転数Ne と前記ステップS12で記憶されたエンジン回転数Ne1との差(Ne −Ne1)が300rpm 以上であるか否かが判定され、前記差分が300rpm 以上であれば、さらにステップS54において、前記ステップS51で更新されるピークホールド値Nepと今回のエンジン回転数Ne との差(Nep−Ne )が50rpm 以上であるか否かが判定される。
【0082】
当該判定は、シフトアップ時にドライバがエンジンを空吹かししたか否かの判定であり、前記ステップS53、54の判定がいずれの肯定であると、シフトアップ時にドライバが空吹かしをしたと判定されてステップS55へ進み、前記クイックリターンクフラグFをセットした後に当該処理を終了する。
【0083】
図22は、前記ステップS28、S36で実行されるクラッチON制御の制御方法を示したフローチャートである。
【0084】
ステップS70では、車速が略0であるか否かが判定される。本実施形態では、車速が3km/h以下であれば略0と判定してステップS72へ進み、シフトスピンドル3の目標角度θT にニュートラル位置をセットした後にステップS73へ進む。これは、車両が略停止した状態でのシフトであり、このような場合にはシフトショックが生じず、素早いシフトチェンジが望ましいためである。
【0085】
また、前記ステップS70において、車速が3km/h以上と判定されると、ステップS71において、シフトスピンドル3の回動がストッパによって制限される角度(本実施形態では、±18度)から6度だけ戻った第2基準角度(すなわち、±12度)を目標角度θT にセットした後にステップS73へ進む。ステップS73では、アングルセンサ28によって現在のシフトスピンドル3の回転角度θ0 が検知され、ステップS74では、前記Ne 制御が実行される。
【0086】
ステップS75では、比例積分微分(PID)制御用のPID加算値が求められる。すなわち、前記ステップS73で検知された現在の回転角度θ0 および目標角度θT の差分(θ0 −θT )として表される比例(P)項、P項の積分値である積分(I)項およびP項の微分値である微分(D)項が、それぞれ求められて加算される。ステップS76では、前記求められたPID加算値に基づいて、PWM制御のデューティー比が決定され、ステップS77において、PWM制御が実行される。
【0087】
図27は、前記PID加算値とデューティー比との関係を示した図であり、PID加算値の極性が正であれば、その値に応じて正のデューティー比が選択され、PID加算値の極性が負であれば、その値に応じて負のデューティー比が選択される。ここで、デューティー比の極性は、PWM制御されるFETの組み合わせを示し、例えば50%のデューティー比とは、FET▲4▼を導通させてFET▲2▼を50%のデューティー比でPWM制御することを意味し、−50%とデューティー比とは、FET▲1▼を導通させてFET▲3▼を50%のデューティー比でPWM制御することを意味する。
【0088】
ステップS78では、第6タイマの計時時間が100msを超えたか否かが判定され、最初は第6タイマが計時を開始していないのでステップS79へ進む。ステップS79では、第5タイマの計時が開始される。ステップS80では、第5タイマの計時時間が10msを超えたか否かが判定され、初めは超えていないのでステップS73へ戻り、前記ステップS73〜S80の各処理が繰り返される。
【0089】
その後、図23の時刻t5 において、第5タイマの計時時間が10msを超えると、ステップS81では第5タイマがリセットされ、ステップS82では、クイックリターンクフラグFがセット状態にあるか否かが判定される。ここで、クイックリターンクフラグFがセット状態にあると、ステップS83では、クイックリターン制御を実行すべく、現在の目標角度から2ないし4度だけ減じた角度が新たな目標角度として登録され、クイックリターンクフラグFがセット状態ではないと、ステップS84において、現在の目標角度から0.2度だけ減じた角度が新たな目標角度として登録される。
【0090】
ステップS85では、目標角度がニュートラル角度に近いか否かが判定され、目標角度がニュートラル角度に十分に近付くまで前記ステップS73〜S85の処理が繰り返される。その後、目標角度がニュートラル角度に十分に近付くと、ステップS86では、目標角度としてニュートラル角度が登録され、ステップS87では、第6タイマが計時を開始する。
【0091】
一方、前記ステップS78において、第6タイマの計時時間が100msを超えたと判定されると、ステップS90では、第6タイマがリセットされる。ステップS91では、クイックリターンクフラグFがリセットされ、ステップS92では、スイッチング回路105のPWM制御が終了される。
【0092】
なお、高速走行時または高エンジン回転時にギアがニュートラル状態からシフトされると、比較的大きなエンジンブレーキが作用してエンジンに過大な負荷が加わる。そこで、本実施形態では車速が10km/h以上またはエンジン回転数が3000rpm以上であると、シフトアップスイッチ51がオン操作されても前記図16の制御を阻止する変速禁止システムが設けられている。
【0093】
図11は、前記変速禁止システムの機能ブロック図である。ニュートラル検知部81は、ギアがニュートラル位置にあると“H”レベルの信号を出力する。車速判定部82は、車速が10km/h以上であると“H”レベルの信号を出力する。エンジン回転数判定部83は、エンジン回転数が3000rpm以上であると“H”レベルの信号を出力する。
【0094】
OR回路84は、車速判定部82またはエンジン回転数判定部83の出力が“H”レベルであると“H”レベルの信号を出力し、AND回路85は、OR回路84の出力およびニュートラル検知部81の出力が“H”レベルであると“H”レベルの信号を出力する。変速禁止部86は、AND回路85の出力が“H”レベルであると、シフトアップスイッチ51がオン操作されても前記図16の制御を阻止する。
【0095】
但し、1速からの加速中で、車速が10km/h以上あるいはエンジン回転数が3000rpm以上で誤ってニュートラルへシフトしてしまった場合は再加速に時間がかかってしまうので、上記した変速禁止システムを付加するのであれば、車速走行中(例えば、車速が3km/h以上)の場合にはニュートラルへのシフトを禁止するシステムを更に付加しても良い。
【0096】
【発明の効果】
本発明によれば、以下のような効果が達成される。
【0097】
(1) 変速軸が一方側または他方側の回動限界まで揺動されれば、その際の変速軸の各回転角度に基づいて変速軸の中点(ニュートラル位置)が求められるので、常に正確なニュートラル位置を求められる。
【0098】
(2) 変速軸のニュートラル位置検知が進むほど、検知された回転角度の正当性を判別するための許容範囲が狭まるので、ノイズ等の影響を受けて狂った回転角度が入力されても、これを除去することができるのみならず、その除去能力も徐々に向上する。
【0099】
さらに、許容範囲を越える回転角度が検知されるごとに前記許容範囲が徐々に広げられるので、例えば角度センサの劣化等が原因で回転角度として従来よりも大きな値が検知されるようになっても、これが狂った回転角度として除去され続けてしまうことがない。
【図面の簡単な説明】
【図1】本発明の電動式変速装置が搭載される車両の操作部の平面図である。
【図2】本発明の一実施形態である電動式変速装置の駆動系の主要部の構成を示した部分断面図である。
【図3】スリーブとギアとが係合した状態の概念図である。
【図4】本発明のスリーブの斜視図である。
【図5】本発明のギアの斜視図である。
【図6】スリーブの凸側ダボ32の部分拡大図である。
【図7】ギアの凹側ダボ42の部分拡大図である。
【図8】凸側ダボ32と凹側ダボ42との係合状態を示した図である。
【図9】従来のスリーブの斜視図である。
【図10】従来のギアの斜視図である。
【図11】変速禁止システムの機能ブロック図である。
【図12】従来のスリーブとギアとの係合タイミングを模式的に示した図である。
【図13】本発明のスリーブとギアとの係合タイミングを模式的に示した図である。
【図14】本発明の一実施形態である電動式変速装置の制御系の主要部の構成を示したブロック図である。
【図15】図14に示したECU100の構成例を示したブロック図である。
【図16】本発明の一実施形態のフローチャート(その1)である。
【図17】本発明の一実施形態のフローチャート(その2)である。
【図18】本発明の一実施形態のフローチャート(その3)である。
【図19】本発明の一実施形態のフローチャート(その4)である。
【図20】本発明の一実施形態のフローチャート(その5)である。
【図21】本発明の一実施形態のフローチャート(その6)である。
【図22】本発明の一実施形態のフローチャート(その7)である。
【図23】本発明のよるシフトスピンドルの動作タイミングチャートである。
【図24】押し付け制御におけるデューティー比の可変制御方法を示した図である。
【図25】本発明のよるシフトスピンドルおよびエンジン回転数の動作タイミングチャート(シフトアップ時)である。
【図26】本発明のよるシフトスピンドルおよびエンジン回転数の動作タイミングチャート(シフトダウン時)である。
【図27】PID加算値とデューティー比との関係を示した図である。
【符号の説明】
1…駆動モータ
2…減速ギア機構
3…シフトスピンドル
5…変速クラッチ
10…シフトドラム
11…シフトフォーク
28…アングルセンサ
30…スリーブ
40…ギア
51…シフトアップスイッチ
52…シフトダウンスイッチ
Claims (1)
- 駆動モータによって一方側または他方側に揺動される変速軸と、前記変速軸の回転角度を検知する角度センサとを具備し、前記変速軸のニュートラル位置からの揺動方向および揺動角度に基づいて所定の変速制御を実行する電動式変速装置における変速軸のニュートラル位置決定方法において、
一方側または他方側の回動限界まで揺動された変速軸の各回転角度をそれぞれ検知し、
前記検知された各回転角度が、それぞれ一方側または他方側許容範囲内にあるか否かを判定し、
前記各回転角度がそれぞれ前記各許容範囲内にあれば、各回転角度を、それぞれ一方側または他方側最大角度として更新登録すると共に、前記一方側または他方側許容範囲を縮小し、前記一方側および他方側最大角度の中間を変速軸のニュートラル位置として更新登録し、
前記各回転角度がそれぞれ前記一方側または他方側許容範囲内になければ、当該一方側または他方側許容範囲を拡大し、前記一方側または他方側最大角度を維持して、前記ニュートラル位置を更新登録しないことを特徴とする電動式変速装置における変速軸のニュートラル位置決定方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP21194098A JP4165779B2 (ja) | 1998-07-10 | 1998-07-10 | 電動式変速装置における変速軸のニュートラル位置決定方法 |
| CA002276935A CA2276935C (en) | 1998-07-10 | 1999-07-05 | Neutral position determination method for speed change gear shaft of electrically operated speed change gear |
| US09/350,151 US6249734B1 (en) | 1998-07-10 | 1999-07-09 | Neutral position determination method for speed change gear shaft of electrically operated speed change gear |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP21194098A JP4165779B2 (ja) | 1998-07-10 | 1998-07-10 | 電動式変速装置における変速軸のニュートラル位置決定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000027991A JP2000027991A (ja) | 2000-01-25 |
| JP4165779B2 true JP4165779B2 (ja) | 2008-10-15 |
Family
ID=16614218
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP21194098A Expired - Fee Related JP4165779B2 (ja) | 1998-07-10 | 1998-07-10 | 電動式変速装置における変速軸のニュートラル位置決定方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6249734B1 (ja) |
| JP (1) | JP4165779B2 (ja) |
| CA (1) | CA2276935C (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE60102311T2 (de) * | 2000-03-10 | 2004-08-05 | Honda Giken Kogyo K.K. | Verfahren und Vorrichtung zur Steuerung einer Gangschaltung mit elektrischer Schaltwalze |
| JP2002264685A (ja) * | 2001-03-07 | 2002-09-18 | Kawasaki Heavy Ind Ltd | 不整地走行車の二駆四駆切換制御方法 |
| JP4187574B2 (ja) * | 2003-04-09 | 2008-11-26 | 株式会社デンソー | シフト制御システムおよびシフト制御方法 |
| JP4849537B2 (ja) * | 2006-03-22 | 2012-01-11 | ヤマハ発動機株式会社 | 変速制御装置および鞍乗型車両 |
| JP4781228B2 (ja) * | 2006-10-27 | 2011-09-28 | ヤマハ発動機株式会社 | 変速制御装置および車両 |
| JP4963058B2 (ja) | 2006-10-27 | 2012-06-27 | ヤマハ発動機株式会社 | 変速制御装置および車両 |
| JP4895996B2 (ja) * | 2007-12-27 | 2012-03-14 | 本田技研工業株式会社 | ツインクラッチ式変速装置 |
| JP5011573B2 (ja) * | 2008-05-13 | 2012-08-29 | 本田技研工業株式会社 | クラッチ制御装置 |
| CN107923529B (zh) | 2015-08-10 | 2019-09-03 | 雅马哈发动机株式会社 | 变速装置和车辆 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3044498B2 (ja) | 1991-08-02 | 2000-05-22 | 本田技研工業株式会社 | 変速装置のシフトドラム駆動機構 |
| DE19610104C2 (de) * | 1996-03-15 | 1999-07-01 | Daimler Chrysler Ag | Schaltvorrichtung für ein Zahnräderwechselgetriebe sowie Verfahren zum Steuern dafür |
| JP3891630B2 (ja) * | 1997-02-10 | 2007-03-14 | 株式会社小松製作所 | 油圧駆動変速装置の緊急停止装置 |
-
1998
- 1998-07-10 JP JP21194098A patent/JP4165779B2/ja not_active Expired - Fee Related
-
1999
- 1999-07-05 CA CA002276935A patent/CA2276935C/en not_active Expired - Fee Related
- 1999-07-09 US US09/350,151 patent/US6249734B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| US6249734B1 (en) | 2001-06-19 |
| JP2000027991A (ja) | 2000-01-25 |
| CA2276935C (en) | 2005-04-12 |
| CA2276935A1 (en) | 2000-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3709955B2 (ja) | 電動式変速装置の変速制御方法 | |
| JP3906948B2 (ja) | 電動式変速装置の変速制御装置 | |
| JP4677070B2 (ja) | クラッチ接続制御装置 | |
| JP4404324B2 (ja) | クラッチ接続制御装置 | |
| JP4165779B2 (ja) | 電動式変速装置における変速軸のニュートラル位置決定方法 | |
| EP1132661B1 (en) | Method and apparatus for controlling gear-shift of motor-driven gear shifter | |
| US6095004A (en) | Shift control method for an electric-power-assist transmission | |
| CA2240229C (en) | Electric-power-assist-type transmission and its control method | |
| JP4280330B2 (ja) | 電動式変速装置の変速制御方法 | |
| US6117046A (en) | Electric-power-assist clutch and transmission and its control method | |
| US6341680B1 (en) | Electric-power-assist transmission and its control method | |
| JP4721243B2 (ja) | 電動変速機の変速制御方法および装置 | |
| JP3709954B2 (ja) | 電動式変速装置およびその変速制御方法 | |
| JP3709956B2 (ja) | 電動式変速装置の変速制御方法 | |
| CA2246884C (en) | Electric-power-assist-type transmission and its control method | |
| EP1925519A1 (en) | Automated manual transmission system for a vehicle | |
| JP3601225B2 (ja) | 自動変速機の変速装置 | |
| EP1288535B1 (en) | Automated vehicle transmission and method for controlling | |
| JP2002323068A (ja) | 同期噛合式自動変速機のクラッチ制御装置 | |
| JP2004190832A (ja) | 自動変速への切換え時作動を改善された車輌用変速装置 | |
| KR19990059942A (ko) | 자동 변속기의 킥 다운 2-- 〉1 변속 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041202 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070926 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080220 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080409 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080723 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080725 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110808 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110808 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120808 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120808 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130808 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140808 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |