JP4149657B2 - 自動化送出装置 - Google Patents
自動化送出装置 Download PDFInfo
- Publication number
- JP4149657B2 JP4149657B2 JP2000507010A JP2000507010A JP4149657B2 JP 4149657 B2 JP4149657 B2 JP 4149657B2 JP 2000507010 A JP2000507010 A JP 2000507010A JP 2000507010 A JP2000507010 A JP 2000507010A JP 4149657 B2 JP4149657 B2 JP 4149657B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- needle
- container
- signal
- injection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M15/00—Inhalators
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/20—Automatic syringes, e.g. with automatically actuated piston rod, with automatic needle injection, filling automatically
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/46—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests having means for controlling depth of insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/20—Automatic syringes, e.g. with automatically actuated piston rod, with automatic needle injection, filling automatically
- A61M2005/2006—Having specific accessories
- A61M2005/2013—Having specific accessories triggering of discharging means by contact of injector with patient body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31565—Administration mechanisms, i.e. constructional features, modes of administering a dose
- A61M5/31576—Constructional features or modes of drive mechanisms for piston rods
- A61M2005/31588—Constructional features or modes of drive mechanisms for piston rods electrically driven
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/13—General characteristics of the apparatus with means for the detection of operative contact with patient, e.g. lip sensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/14—Detection of the presence or absence of a tube, a connector or a container in an apparatus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/58—Means for facilitating use, e.g. by people with impaired vision
- A61M2205/581—Means for facilitating use, e.g. by people with impaired vision by audible feedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/58—Means for facilitating use, e.g. by people with impaired vision
- A61M2205/582—Means for facilitating use, e.g. by people with impaired vision by tactile feedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/58—Means for facilitating use, e.g. by people with impaired vision
- A61M2205/583—Means for facilitating use, e.g. by people with impaired vision by visual feedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/20—Automatic syringes, e.g. with automatically actuated piston rod, with automatic needle injection, filling automatically
- A61M5/2066—Automatic syringes, e.g. with automatically actuated piston rod, with automatic needle injection, filling automatically comprising means for injection of two or more media, e.g. by mixing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31525—Dosing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31533—Dosing mechanisms, i.e. setting a dose
- A61M5/31545—Setting modes for dosing
- A61M5/31546—Electrically operated dose setting, e.g. input via touch screen or plus/minus buttons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31565—Administration mechanisms, i.e. constructional features, modes of administering a dose
- A61M5/3159—Dose expelling manners
- A61M5/31593—Multi-dose, i.e. individually set dose repeatedly administered from the same medicament reservoir
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31565—Administration mechanisms, i.e. constructional features, modes of administering a dose
- A61M5/3159—Dose expelling manners
- A61M5/31593—Multi-dose, i.e. individually set dose repeatedly administered from the same medicament reservoir
- A61M5/31595—Pre-defined multi-dose administration by repeated overcoming of means blocking the free advancing movement of piston rod, e.g. by tearing or de-blocking
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/32—Needles; Details of needles pertaining to their connection with syringe or hub; Accessories for bringing the needle into, or holding the needle on, the body; Devices for protection of needles
- A61M5/3205—Apparatus for removing or disposing of used needles or syringes, e.g. containers; Means for protection against accidental injuries from used needles
- A61M5/321—Means for protection against accidental injuries by used needles
- A61M5/3243—Means for protection against accidental injuries by used needles being axially-extensible, e.g. protective sleeves coaxially slidable on the syringe barrel
- A61M5/326—Fully automatic sleeve extension, i.e. in which triggering of the sleeve does not require a deliberate action by the user
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A90/00—Technologies having an indirect contribution to adaptation to climate change
- Y02A90/10—Information and communication technologies [ICT] supporting adaptation to climate change, e.g. for weather forecasting or climate simulation
Description
(技術分野)
本発明は、
a)ハウジングと、
b)ハウジングに配置され、開口部を有する流体用容器と、
c)開口部と流体連通して接続される送出管路であって、容器から遠位のフロー点における前方端部と、容器への近位のフロー点における後方端部とを有し、前方端部および後方端部が、それらの間に軸と、前方方向および後方方向とを画定する管路と、d)管路を通って容器から少なくとも一方向に流体を送り出すように配置されるポンプとを備える送出装置に関する。本発明は、さらに、このような装置の操作方法に関する。
【0002】
(背景技術)
送出装置は、広範囲にわたる種々の用途に使用されることが既知であるが、本発明は、主として、注射剤受容対象が中実または半中実であり、注射剤受容対象に対する注射装置の向きが、注射の本来の結果に重要であるような用途の注射装置に関する。代表的な用途は、向きが種々の理由により臨界的である人または動物への医薬調合剤の投与である。調合剤の性質および処理の意図とにより、標的組織は、正確な生化学的な活性度、効用、および吸収期間にとって極めて重大である。意図される注射位置は、例えば、皮下、筋肉内、静脈内などである。送り出される投与量は、臨界的な場合が多く、例えば不注意による針の抜去または誤った組織内への部分配置による調合剤の喪失から誤った処置となる場合がある。これとは逆に、特に多い容量が、針穿入中、故意に、かなりの深度に、あるいは一部は緩速解放組織に、また他の一部は急速解放組織に分配される場合がある。
【0003】
事故および故障の場合には医学的な関連矯正処置を施すこともできる熟練したオペレーターの手によるときは、普通の皮下用注射器などの最も簡単な注射装置を使用するときにも、これらの要求は満たされ得る。限られた訓練しか受けていない素人が危篤または緊急の状態の場合、かなり安全に注射を行うことができるような、多少なりとも、自動化した装置がかなり前から存在している。こうした装置は、一回の注射量用のみに設計されることが多い。長期投薬における一般的傾向は、小児または身体障害者の場合にも、患者自身に投薬責任を負わせる。ここでは要求がいっそう高まっている。連続投薬は、恐らく投与量設定の変化を伴う繰り返しの投与、またペンタイプ注射器の場合のように空になったカートリッジを新しいカートリッジと適宜取り換えることなどに対処するよう患者に要求する。高レベルの自動化および制御により、単に注射段階だけでなく、臨界的な初期段階と調製段階においても誤りを避けるのが望ましい。毎日の投薬に依存している患者はまた、便利さと共に日常生活で持ち運びできるだけ十分に独立した装置を必要としているが、それは当然である。
【0004】
機械的な自動化は、普通の自己注射器に供給されている。一般にユーザーは、皮膚に対して適当な注射位置に装置を配置し、トリガボタンを操作することが期待される。例えば、スプリングシステムなどに蓄積された機械エネルギーは、組織への自動穿入、薬の自己注射、さらに場合によっては自動針引き込みをも行う。もう少し簡単なシステムでは、自動穿入は行わず、ユーザーに針挿入をさせる。したがって、こうした装置では、身体に対して装置を方向づけ、かつ配置する上でオペレーターを支援することはほとんどない。注射器をトリガするために、注射位置に対して装置を押し付けるようにオペレーターに要求する自己注射器も既知である。典型的な例は、AU563,551、US4,717,384、EP518,416、WO93/23110などに開示されている。このような構造によって供給される補助は限られ、柔軟性がなく、様々の予知可能な操作上の、または危険な状態には適応できない。位置よりも圧力をベースにしたトリガリングが、望ましい適応をさらに難しくしている。一般に、トリガリングが発生すると、故意にであれ、または偶然にであれ、操作シーケンスが非可逆的に進行する。さらに、位置の狂いの危険性は、関連するリバウンド効果と強制移動とにより、機械装置において一般に高い。
【0005】
電子または電気機械原理に基づく自動化した装置も提案されている。一般に、装置の向きが臨界的でない、主として病院で使用される、または永久使用される注入ポンプや同様の注射装置をここでは無視して、例えば、EP143.895、EP293,958、DE2,710,433、WO93/02720、WO95/24233、WO97/14459およびわれわれの同時係属中の出願SE9602610−9(US60/021,397)とSE9602611−7(US60/021,293)などに述べられているように、いくつかの先行特許の明細書は、身体に対して直接作用するハンドヘルド装置に関する。既知の装置は、電動機で可能な正確かつ再生可能な注射、電動機援用自動穿入および混合、または組成再配分、カートリッジ同定、サンプル分析、注射データの収集と操作、投与量設定、適当な混合または脱気のための重力に対する注射器の相対的方向づけなどのいくつかの点で自動制御原理を利用している。この多様性にもかかわらず、この種類の自動化した装置は、注射剤受容体に対する装置の向きに対処しないし、それらに関するいかなる問題をも解決していない。
【0006】
よって、装置の方向づけ関連処理段階においてユーザーを支援し、誤りおよびそれらから生じる誤用の結果を防止または改善する注射装置、特に自己投薬中の患者に有用である注射装置に対する絶えざる要求がある。本発明は、より一般的な効用を有するが、この背景に対して主に記述されている。
【0007】
(発明の概要)
本発明の主目的は、記述されているような既知の注射装置の短所及び欠点を回避することである。更なる特別の目的は、注射位置に対して装置を適切に方向づける点においてユーザーを支援する注射器を提供することである。別の目的は、様々の処理と操作状態に柔軟性および適応性のある装置を提供することである。さらに別の目的は、意図していない動作または誤用の結果を防止し、または改善することである。別の目的は、正確な標的組織への調合剤の投与を容易にすることである。さらに、別の目的は、非可逆的な注射手順を回避することである。更なる目的は、単に機械的な方向づけ手段への依存を回避することである。さらに、別の目的は、電子または電気機械自動化手段と完全に両立可能な方向づけ支援手段を提供することである。さらに、別の目的は、処理が極めて簡単で、患者の自己投薬に適し、またそうでない場合、限られた技術と訓練とを必要とする装置を提供することである。
【0008】
これらの目的は、添付の請求項に示されている特徴を有する装置および方法によって達成される。
【0009】
近接センサと、センサから電磁信号を導出するコンバータとを有する注射装置を提供することによって、上述のいくつかの目的は達成される。信号は、注射器のあらゆる他の電子または電気機械自動化手段に、直ちに使用可能かつ両立可能であり、そして機械的な方向づけ手段のみへの依存は回避される。信号は、圧力または大きい力を必要とすることなく回収可能である。変換されたセンサ出力を使用することは、柔軟性に富み、多数の操作状態に適応可能である。このセンサ出力が装置のトリガリングシーケンスに使用される場合、持続または繰り返し信号などの所定の特徴を有するように要求すること、または、狭いシーケンスウインド内でのみ信号を操作可能にすることによって偶然の始動を回避することができる。同様に、非可逆的な操作手順は、例えば装置が不適当な位置に移動される場合、注射を中止するなど、装置を使用不能にする目的のためにセンサ出力を使用することによって回避可能である。同様の理由で、装置は、所定の穿入深度にのみ注射可能にすることによって標的組織に対して選択的とすることが可能である。所与の変位許容範囲を超える前に、信号を、ユーザーに警報を鳴らしたり警告したりするために使用すると、操作の誤りは防止可能である。利用可能な、全面的な取扱い補助手段は、患者の自己処置の多くの場合のように、単純さが極めて重要である用途に装置を良好に適応させる。使用される原理は、手動または自動の注射開始、操作、および終了の各段階と適合可能であり、また場合によっては、例えば、自動穿入、注射、針の引き込みなどに適する。装置自体は、特に、検知する目的のための針カバーなどの既存の部分を使用しない場合は、他の考察によって必要とされる以上に複雑にする必要はない。
【0010】
本発明による更なる目的および有利な点は、下記の詳細な説明から明らかになるであろう。
【0011】
(詳細な説明)
導入部に示されているように、ここに記述されている注射器は、医療分野内外の種々の目的に、また、あらゆる容器内に入れられたあらゆる送出目的の化学薬品、組成物または混合物などのあらゆるタイプの調合剤に使用される。略述された理由のため、システムは、設計制約が多くの他の用途におけるよりもさらに厳しい医薬送出装置と関連して、ある特定の価値を有している。便宜上、本発明は、この用途に関して記述される。
【0012】
本発明の原理は、広い意味で、送出装置またはシステムに使用可能である。装置からの送出管路は、注入チャンネル、チューブまたはカテーテルなどのあらゆる導通手段、針またはカニューレ、あるいは液体ジェットまたはガス推進剤を使用する粒子ガンに基づく針無しシステムなどである。容器の内蔵物質は、ここではポンプと呼んでいる送出機構を使用して送り出されるが、この要件を満たすあらゆる物質を対象とすることが可能である。通常、物質は流体であるが、液体や、エマルジョンまたは懸濁液など液体として挙動する物質が好ましい。他の成分、特に固体が最終調製の前に存在することがあるが、これらの所見は最終調製に関する。また容器内蔵物の種類は、広い意味で薬を含み、さらに最も一般的に薬は工場で調製されるが、例えば、事前に充填され、また容器に注入される天然成分と体液も包含されるものと理解すべきである。本発明は、高せん断力などの機械応力によって分解または変形を受けやすい感受性化合物と関連する特定の問題の解決を支援する。高分子化合物はこのタイプのものであり、高分子ホルモン、例えば、成長ホルモンやプロスタグランジンなどである。本発明はさらに、典型的には、ホルモンやプロスタグランジンなどの凍結乾燥粉末を溶媒中に溶解するときなど、すべてが流体であるか固体を含んでもよい2つ以上の成分の混合のように注入直前の調製段階を必要とする薬と関連する特定の問題の解決を支援する。
【0013】
投薬方法はさらに、広い制限範囲内で変更可能であり、完全連続注入、変更フローを有する連続注入、間欠注入、あるいは同量投与か、変更量投与のいずれかを繰り返す注射などを含む。特に、好ましい方法で自動化手段と組み合わせる場合、投薬方法は、ソフトウェアの適応または同様の制御によって容易に変更可能である。携帯用装置においては、間欠投与が一般的である。同様に、送出装置は一回投与量操作用としても考慮されてはいるが、一般に、間欠投与のための2回以上の複数の個人用投与量のために設計されている。
【0014】
送出目的の基本機能に加えて、好ましくは、送出システムは、容器とその内蔵物とを始動するなどの他の重要な特徴を備え、かつ容器およびポンプ部分の電子回路的部分と機械的部分の両方の様々なチェックおよび制御をも行う。
【0015】
本発明は、定置、または常置された送出装置に適用される。以下説明する理由により、本発明は、移動目的の送出装置、特に搭載式エネルギー貯蔵、電動機、プロセッサなどの手段を備えた自律式装置、特に、真に携帯用の小型ハンドヘルド装置に特別な利点を与える。
【0016】
導入部で述べたように、好ましい送出装置は、少なくとも、a)ハウジングと、b)容器と、c)容器と流体連通して接続される送出管路と、d)管路を通って、少なくとも容器から流体を送り出すように配置されるポンプとを、一般に備えていると言える。
【0017】
ハウジング
装置のハウジングは、一般的な意味で理解されるべきであり、特記しない限り主に、移動用の基準点、およびこの前記移動を行う始動手段によってハウジングと移動または掴み部分との間に加えられる力の基準点を表わす。可動部分は、ポンプ装置に、例えば、混合、自動穿入、針による射出および針の引き込みなどを行う部分に存在する。最小機能要件は、ハウジングが、サポートまたは可動部分用プラットフォームと、移動及び力を供給する始動手段とを提供することである。しかし、一般的慣習におけるようにハウジングが、少なくとも部分的に部品を包囲する容器を形成することが好ましく、さらに、オペレーターによって制御、または監視されるように設計されている主要部分のみが、外部に露出される程度に形成されることが好ましい。
【0018】
容器
容器部分は広い意味に理解されるべきであり、あらゆる種類のチューブ、器、柔軟性のあるバッグ、ガラス瓶、アンプル、カートリッジ、カルプル(carpoule)、注射器本体などの様々な形を取ってもよい。少なくとも開口部または機構への取着け部において剛性を有する容器を使用する際にかなり利点があるが、さらにガラス瓶、アンプル、注射器本体など全体的に剛性を有する容器の方が好ましい。ガラスまたはプラスチックなどの一般的な容器材料が、好ましくは使用されうる。容器は、アウターケーシングまたはキャップ、取り付け品、保護物などのその他の複数の部分構造を含むような一体構造または合成構造であってよく、ここに「容器」と用いられるときは、あらゆる補助部分を含むと解釈されるべきである。容器が詰め替え可能な場合、あるいは容器が各注射行程前に外部供給源またはチャンネルから注入される調合剤を繰り返して引き出すポンピングシステムの一部分である場合、例えば、使い捨ての注射器に使用する場合、容器はハウジングと一体化されることもある。また容器は、例えば、使い捨ての事前充填容器の場合の取り換えのため、あるいは含有物のタイプまたは患者を変更する場合、簡単な滅菌またはきさげ仕上げのために、分離されていることもある。既知のように、例えば注入前に混合し、各容器から一部容量を引き出す際、注入中に混合することが望ましい場合、または異なる成分の連続注入の場合には、本質的に、2つ以上の容器があってよい。
【0019】
容器は少なくとも1つの開口部を有しており、その開口部を通って例えば、体液の吸引の場合、または容器に充填し、混合し、その中で溶解するなど開口部が必要となる調製段階で、患者または容器への薬の投与などのために容器内部から周囲へ、投薬が装置の主な送出操作中に通過する。流体連通が確立される前に、始動などのいくつかの装置の操作を行うことが可能であるし、かつそうすることは多くの状態において好ましい。そして、アンプルまたはバッグの場合のように容器自体への着脱自在のキャップ、あるいは刺し通し可能あるいは破断可能な部分の存在、あるいは貫通可能な膜または隔膜の場合のように特別に設計された部分の存在など流体連通を形成する調製手段によって開口部要件が満たされると考えるべきである。すべての流体連通は、例えば剛性を有する容器内における薬の通過および圧力均等化用などの1つの開口部を通して、または柔軟性のある、あるいは移動可能な、または変形可能な部分を有する容器からの送出によって起こる。しかし、少なくとも1つの開口部と同一であるが、全く異って、例えば、可動壁またはピストンを有する注入または注射器タイプのように別の目的に適する別の開口部が設けられることを妨げるものではない。
【0020】
送出装置が、画定された送出のために測定された量を連続的にまたは断続的に容器から引き出するように構成される場合には、容器は、簡単なボトル、ガラス瓶、バッグなどでよい。特に自己投薬に関連して多くの場合、容器のタイプはさらに精巧であり、一般にカートリッジ形態であり、そのカートリッジ部分が複数室のカートリッジの場合には、送出システムの注射器タイプのさらに精巧な容器部分となっている。本目的のカートリッジは、通常のカートリッジの軸を画定する前方部分および後方部分を有する器と、前方部分に配置される調合剤用出口と、後方部分に配置される少なくとも1つの稼動壁とを含み、この壁の変位により調合剤を出口の方に移動させ、または出口を通して放出させると一般的に言われている。器の形状と可動壁は互いに適合し合う必要がある。器は、略チューブタイプの器を形成する前方部分と後方部分との間に一定の器の軸を有する実質的に一定の内部横断面を有し、最も好ましくは、この断面は、ほぼ円筒形の器を形成する一般的な円形のものである。可動壁は、弾力性を有することもあるが、器の内面に密着して適合する、実質的に形状不変な本体であることが好ましく、好ましくはピストンタイプである。
【0021】
2つまたは複数室のカートリッジタイプは、例えば、投与前に2つ以上の成分または前駆物質の混合を要求する調合用として既知である。成分は、異なる既知のデザインの1つ以上の中間壁によって分離保存されており、その壁は、器をいくつかの室に分割する。それらの室は時にはカートリッジ軸に沿って平行に配置されるが、最も一般的には軸に沿って積み上げられた状態である。成分の単一化は、中間壁のバルブ構造を壊し、貫通しまたは開放することによって行われる。この操作は、例えば、カートリッジ前方か、後方可動壁を通じて、または後方可動壁にピンまたは針を導入するか、あるいはカートリッジ外部の手段によって、行われる(例えば、引用のWO93/02720と比較)。別の既知のデザインにおいて、中間壁または壁はプランジャタイプであり、室間の流体連通は、内部壁が、1つまたはいくつかの拡大部分あるいは繰り返し周辺溝を有するバイパス部分にプランジャを移動することによって達成され、かつ後方可動壁の変位で後方室内蔵物質のバイフローを前方室に与える方法で取り込む(例えば、US4,968,299またはWO93/20868、およびWO95/11051と比較)。室はガス、液体、固体を内蔵してもよい。一般に、少なくとも1つの液体が存在する。薬学的応用においては最も一般的に、2つの室のみが存在し、典型的に、1つの液体と1つの固体とを内蔵し、固体は溶解されて、混合操作の間に再組成される。
【0022】
管路
一般的な意味において、送出管路は容器の開口部と流体連通して接続され、容器から遠位のフロー点における前方短部と、容器に近位のフロー点における後方端部とを有する。最も基本的な形状の場合、管路は、容器開口部の延長として考えることが可能である。この点で前方端部は、例えば上述の一般的なあらゆる注入チャンネルのような別の管路への接続を含むいかなる性質のものであってもよい。しかし前方端部は、標的位置、例えば、患者の表皮または患者の体内への調合剤の送出に適する注射チャンネルの末端であることが好ましく、その目的のために、少なくとも管路の最後である最前部分は、その位置への送出に適するべきである。使用される送出機構によっては、前方端部は、液体ジェット、粉末ガン、スプレーなどの場合のように標的位置と直接接触するように設計されないことがある。このような場合前方端部は、標的から少し距離をおいた位置、または真の標的は表皮下にあるにもかかわらず、標的の表面に位置決めするオリフィスまたはノズルである。他の例において、前方端部は、カニューレまたは一般的な針の場合のように、標的に貫通するように設計されている。多くの用途において、管路は、注射器の針用として実質的に直線状であることが望ましいが、前方端部と後方端部との間のチャンネルは、柔軟性のある注入チューブ用、または搭載式固定接続用として曲線状または、カーブしている。一般に、少なくとも管路の最後である最前部分は、フローの方向に出口軸と、前方方向及び後方方向を画定する。位置または方向の状態は、特記しない限り、この関係で示される。
【0023】
ポンプ機構
容器開口部を通る薬の送出の機構は、基本的には、特定の種類または使用される容器および薬に対して選択される少なくとも1つのタイプのポンプを含む。ポンプは、容器内に機械的または電解蓄圧式などの何れかの種類の圧力供給源と、制御用の適当なバルブ手段とを含む。WO94/24263によって例示されるような粉末の移動可能な送出、またWO94/2188によって例示されるような液体ジェットによる同様の送出、またはWO88/09187によって例示されるような規則的なチューブ注入などのように、上記の方法は、実質的には、あらゆる種類の容器とあらゆる種類の製品とともに使用可能である。一般使用としては正の排水量制御に基づくポンプ、特に、液体ジェットについてはUS5,480,381、手動で操作される針利用装置についてはUS4,564,360などに例示されるような分離シリンダまたはピストンに基づくこのようなポンプが好ましいが、いかなる種類の容器でも、蠕動作用または遠心力作用に基づくポンプとともに使用可能である。一般的な注射器タイプの容器は、特化したポンプシステムを必要とする。機構は、多くの異なるタイプまたサイズの注射器を収容することが望ましい場合に好まれる初めに引用したUS4,978,335によって例示されるようなピストンロッドを有し、前記ロッドと噛合い、かつ前記ロッドを軸方向に変位する完全注射器に基づいて作動するのに適するか、あるいは容器がより小型化でき、また携帯用装置により適応できる、WO95/26211、EP143,895、EP293,958などによって例示されるようなカートリッジタイプ容器のピストンに略直接に作用するピストンロッドを有するかのいずれかである。さらに、2つまたは複数の室のカートリッジは、初めに述べられているWO93/02720によって例示されるような種々の形状の様々な装置を使用可能である。論じられた様々なポンプ機構は、薬に影響を与える機械的手段、すなわちピストンロッドなどのピストン手段を含み、これはガス圧力、真空、水圧、スプリング、手動操作などのあらゆる既知の手段によって始動される。特に全自動化した装置に容易に適応できるため、間接に、または好ましくは直接に、電動機などの電気装置によってポンプ機構を始動することが好ましい。
【0024】
この機構は、別の構成要素を含むことが好ましい。例えば、既知の方法で軸方向変位またはピストンロッド軸の回転を監視することによって、ポンプを送出された投与量の確保のために直接的または間接的に利用することが一般に好ましいとはいえ、この機構は、送出された薬を例えば直接計器で測定することにより、送出された投与量を確保するための特定の手段を含むことがある。特に、機構は、上述の管理パターン、容器またはカートリッジの始動、自己制御または監視、および処理された操作段階の可能な記録の少くともある部分を実行する制御システムを含む。このようなシステムは、US4,529,401によって例示されるような技術で既知であり、多数の方法で設計される。本発明の目的のために、制御システムが少なくともセンサシステムのある部分を駆動かつ管理し、それから得たデータを処理することが好ましい。
【0025】
近接センサ
概要
本発明の原理は、注射器の何れかの部分と対象との間の間隔または方向づけを確立することが望ましい場合には常に、いかなる注射器にも利用される。対象はオペレーターであり、例えばオペレーターの存在が明確に確認されない場合、装置を不能にする。対象は、例えばデータ交換の場合、適当な送信を確保するための通信リンク部分でもよい。
【0026】
適当な位置を確保するという主たる目的によれば、対象は注射標的、例えば送り出される、または注射される調合剤を受容する患者または動物である。この行為を行うために、管路前方端部に対する位置が与えられるようにセンサが配置されることが好ましい。柔軟性のあるチューブ管路を使用するときのように、管路前方端部が、ハウジングに対して与えられていない場合、この端部を配置する際にユーザーを支援するために、センサを前方端部に対して固定して配置することが必要となる。この配置はさらに、信号がハウジング内の自動化手段によって使用されるか、または処理される場合、ハウジングまでワイヤ、または別の連絡リンクを必要とする。管路前方端部とハウジングとの間に所与の空間関係を有する注射装置に関連して本発明を使用する場合利点がある。例えば自己注射器において一般的である、または単に針やそのカバーにアクセスし、あるいは穿入深度を調節するために針の露出と引き込みを伴いながら、管路はさらにハウジングに対して移動可能であるが、その後は通常、予め定められ、かつ予測可能な進路に導かれる。こうしてハウジングに管路前方端部を配置する場合、センサは前記管路前方端部に配置可能である。センサは、ハウジングに対して固定されることが好ましい。本発明は、導入部で論じられている理由のため、位置選定が重要である注射器に基づく針に首尾良く利用されている。ここに与えられたセンサの位置は、センサ自体がスイッチの場合のように可動部分を備えることを除外しない。
【0027】
注射標的に対する検知方向は、装置の位置決めの目的により異なるが、検知方向は、注射の送出または注射方向とは全く無関係である。さらに、例えば、本体キャビティに作用するか、または取り付け品に関連するときのように、注射標的よりほかに基準面がある場合でかつ、所望の装置の方向づけが注射方向に関連する場合でかつ、検知方向は、注射方向に直角または反対になるなど注射方向と異なる。さほど複雑でない状態において、検知方向は、少なくとも注射方向に、または画定された前方端部の管路軸に平行な構成要素を有することが好ましい。注射方向に対してある角度、特に、鋭角の検知方向が使用されることがある。これは例えば、限られた深度にであるが、ある一定の安全な距離だけ針またはカニューレを導入するとき、または歯科用のように本体アクセスがさらに垂直なアプローチを許容しない場合に、針を横方向に挿入するか、または標的表面の方に傾斜するのが普通であるとき、適当な開始位置を確立するためである。ほとんどの用途において、検知方向を注射方向と実質的に平行とすることが好ましい。
【0028】
センサタイプ
センサタイプの選択は、検知の目的、対象の性質と標的のタイプ、さらに、信号処理、スペース的考慮、利用可能エネルギーなど多数の情況によって決定される。一般に、適当な検知原理および構成要素は既知であり、そのまま、あるいは本目的のためのデザイン変更を加え使用可能である。
【0029】
例えば、他の装置および制約に関して自由な位置決めをさせるためや、限られたスペースにおいて操作アクセスを維持するためや、センサの汚染を防止するためや、壊れやすいセンサを損傷しないためや、液体ジェットまたは粉末ガンタイプなどの別の無接触注射タイプへの検知に適用するために、対象から少し距離をおいたセンサと共に対象の存在、または対象への近接を検知可能である無接触センサを使用することが望ましい。この目的のためのセンサタイプは、例えば熱、IR、無線検知などに基づいている。これらには限られないが、サーミスタ、サーモ抵抗器、IR受信機などのような一般的な構成要素を使用することが可能である。そしてこれらの構成要素自体、またはそれらに接続される電子回路は、体表面温度などの一定の標的温度に調整される。無線、IR、超音波などの発信機を含む場合、受信機は、標的によって定まる振幅、周波数、位相、シールドなどに基づく一定の距離で信号を供給するように設定可能である。好ましい方法は、簡単で、信頼でき、標的タイプと距離とに適応可能な容量性または誘導性検知である。標的によって影響を及ぼされる場合、容量または電磁界が変化することから所望の信号が導出される。上述のすべての方法は、対応するパラメータの変化によって対象の存在を検知することと、さらに、既存の市販されている構成要素を使用するとき必要な所望の電磁信号を供給することとが可能である。装置がさらに、対象と接触する部分を組み込むことは除外されない。その例としては、注射中に装置を安定させるのを補助するためのスリーブや他のスペーサ構造などであり、この場合、この構造は、近接信号を供給するように構成される必要はない。望ましい場合、追加の構造の必要性を回避するか、追加の接触補助を供給するかのいずれかのため、上述のセンサタイプも、対象に直接に接触した状態で使用可能である。
【0030】
調合剤が、針、カニューレ、注入チューブなどのチャンネルを通して対象に導入される場合に、注射器と対象との接触が必要である。多くの状況において示されているように、例えば、注入中に装置を安定するため、対象の上に装置を置くか、または対象に装置を取り付けることによってオペレーターの負担を軽減するため、注射位置で患者の皮膚を圧縮したり伸ばしたりするため、あるいは患者を穿入の痛みからそらすために、注射器と対象との間に追加の接触を有することが望ましい。ある間隔をおいて操作する、あらゆる上述の近接センサもまた記述された突出部材を有するか、または有することなく、対象と接触した状態で使用可能である。しかし接触する場合、センサは、好ましくは接触センサの形態に製作されるのがよい。部分が所望の所定の相対位置を有するとき、機械的接触は、センサと対象との間に持続的に行使される、例えば圧力として検知可能であり、この方法はまた、例えば適当な注射のため、あるいは反跳力に対する保護として、一定の所定の接触圧力があるときのみに応答するように調整される。センサは、真の圧力変換器と、圧電装置または、スプリング力や柔軟なスナップタイプロックなどの機械的手段で付勢されるスイッチとを備える。圧力検知は、あらゆるセンサ構成要素に大幅な移動をもたらす必要はない。接触は別法として、可動部分と対象の間の相対移動で対象によって生ずる可動部分の変位として検知される。変位検知は簡単に行え、小さな力しか必要としない。変位は、移動によってコイルに誘導され、さらに速度信号をも供給する電流などとして示される。変位は、可動部分が臨界位置にあるとき、記述されたあらゆる圧力検知器でも起こりうる可動部分の位置としても示されるが、スイッチタイプ検知器で十分である。例えば光電要素またはIR送信機および受信機などによる光学検知に基づく、あらゆるスイッチタイプを臨界位置にある可動部分に使用することが可能である。標準マイクロスイッチ、または可動部分により開閉される接触手段を有するアプリケーション別特定設計のものなど可動接触面を有する従来の機械スイッチを使用することが可能である。信頼性の理由から例えば、磁石によって影響を及ぼされるホール素子またはトング素子、あるいは移動による誘導電流によって影響を及ぼされる特に密閉形のリレー素子など、間接にスイッチ位置に影響を及ぼされるスイッチ素子を使用することが好ましい。変位は、多くの目的に十分である所望の端部位置にのみ信号を供給するが、例えば装置の適当な使用を監視するため、または調整可能な近接検知を供給する場合、連続的に、または複数の個別の位置に通路に沿って信号を供給してもよい。可動部分の変位は、一般的に圧力検知におけるよりも大きく、少なくとも1mm、好ましくは、少なくとも2mm、最も好ましくは少なくとも4mmである。
【0031】
使用されるセンサタイプと無関係に、他の目的のために必要とされるものへの追加構成要素として、センサが送出装置に、具備されている。しかし、接触センサで最も簡単に行える追加の検知能力のために他の目的のための構造を適応させることが好ましい。装置管路と関連する部分を有するセンサを配置することが好ましいことがよくある。液体ジェット、粉末ガン、スプレー、吸入器などのような無接触送出の場合、このような装置は、より一般的に使用されるスリーブまたはオリフィスタイプ開口部、あるいはマウスピース、洗眼器などの特定標的器官に適応される部分などの、対象との接触のためのガイドまたは位置づけ部分を備えることが多く、またセンサをこのような部分と関連させることが望ましい。同様な部分は存在し、対象との接触のための管路を有する送出装置を使用するときに利用されてもよいが、ここでは好ましくは、センサはチューブ、針、カニューレなどを組み込むこれらの管路構成要素と関連している。可動カバーは、対象への挿入のための先細り管路に使用されることが多く、そのカバーは、管路挿入に関連して後方に押される。カバーは損傷または雑菌による汚染に対して管路を保護し、ユーザーが偶然にこじあけないようにし、また不安を減少するために患者から針が見えないようにするために存在する。有利な点として、センサはこのようなカバーと関連しているので、何らかの方法で、センサがカバーの移動に応答して信号を供給し、また好ましくは、識別可能信号が管路の適当な穿入で受信される。この原理は、カバーが存在する場合、柔軟性のある注入チューブと関連して採用可能であり、装置を支持する必要なしに、注入チューブが、熟練の開業医によって挿入されるような場合だけであるとは限らない。むしろ、ハウジングを掴んで、管路穿入を行う場合に利点が最も強調される。こうした方法は一般に、患者の自己投薬の場合に行われ、その場合通常管路が、軸方向を除く少なくともあらゆる方向においてハウジングに対して固定配置されることが要求される。軸方向においては、例えば、自動穿入または針プロテクター除去のために移動性は保持されるが、多くの場合、管路は軸方向に固定される。本発明は、注射器用可動針カバーと関連するセンサに対して有利に利用される。
【0032】
記述されたすべてのセンサ配置において、基準点を形成する臨界装置部分が標的対象に対して所望の位置を有するとき、検知可能信号が得られるようにセンサが配置される。管路と対象との間に接触がない場合、この基準点が、液体ジェット用としての集中送出か、あるいはスプレー用としての分散送出かのいずれかの調合剤の送出に適する間隔である。センサは、適当な位置の対象に対して部分的に配置される圧力センサ、あるいはオリフィスを除いておおっているカバー上の変位センサ、または簡単な前方スイッチである。管路を貫通するためにセンサは、針またはカニューレのベースにおいて所定の穿入深度で、対象によって連動されるように配置される圧力センサか、あるいは例えば、所望の点にあるスイッチによって、カバーの所定の変位で信号変化を有する記述されたようなカバーのための変位センサとなる。
【0033】
初めに示したように、センサ測定方向は、通常は、管路に対して前方方向ではあるが、どの角度であってもよい。例えば、所与の平面に方向づけを決定するための2つのセンサ、または例えば装置をキャビティ内で操作する場合、三次元のすべての方向づけを決定するための3つのセンサなどの多くのセンサが、その他の次元で位置に固定するように使用されることがあるが、単一のセンサ方向でも多くの用途に対して十分である。
【0034】
信号の使用
センサから受け取られる信号は、記述されたように近接データを表わす電磁信号の形態であるか、またはそのような形態に変換されなくてはならない。電磁信号は、光信号などの電磁波に基づいているが、電気信号であることが好ましい。センサとして使用される多くの適当な構成要素が、このような信号出力を供給するように設計されているが、そうでない場合は、このような出力を確保する回路に挿入される。この種類の固有の一体化された、または独立した構成は、センサ出力を電磁信号へ変換するコンバータとして見なされることが可能である。そのように受け取られ、または変換された電磁信号は、一般的にいえば、制御信号を送出するためにプロセッサで処理される。制御信号は、装置の機能または操作上の構成要素を制御するのに使用される。操作上の構成要素についていくつかの典型例が下記に示されてはいるが、いかなる種類のものでも可能である。制御信号は、その後の使用法に依存し、機械的な、あるいは、光学的な性質のものなどが可能であるが、電気信号であることが好ましい。
【0035】
制御信号は例えば、装置が送出のために始動される前に、不適当な位置をユーザーに警告し、または警報を出すなど、ユーザーにメッセージを発するのに使用される。メッセージは、音声、振動のような便宜的に検知可能な信号、警報ランプの形態の視覚信号、またはディスプレイなどのさらに複雑なメッセージ、あるいはこのようなメッセージの何れかの組み合わせなどであってよい。
【0036】
制御信号は、オペレーターによって行われる動作に基づいてその上に基本装置の機能を制御するのに使用されることが好ましい。制御信号は、適当な近接状態に依存して、それぞれに装置を作動可能、または不能にするのに使用される。この作動可能/不能は、ピストンロッドまたはポンプ機構などの機械的機能をブロックするリレー装置などの電気機械リンクによって起こされる。制御信号によってその作動が決定される電動機など、装置を駆動する少なくともいくつかの自動化手段を有する装置に関連してこの機能を使用するのがよりよい。例えば、適当なカートリッジ制御、始動、作動の順序づけ、投与、管理データのフィードバックなどを確保するために、装置がさらに、電動機手段の制御用プロセッサ手段を備えることはよりよいことである。この場合、例えば、近接状態が満たされるときのみ、または上述の始動段階が適当に完了され、または適当な状態が自己制御プログラムによって明確に立証されたときのみ、プロセッサに電動機始動制御信号を出させるなどの更なる柔軟性を持たせるために、電磁信号がプロセッサに送り込まれる。既存のプロセッサユニットは、ここでは、電気機械信号と制御信号との間のプロセッサとして機能を果たす。
【0037】
制御信号は、さらに、装置を実際にトリガするのに使用される。すなわち、センサが所定の近接状態を信号で合図するとすぐに、自動機能がスタートする。上述した作動可能/不能に関して、このトリガ機能は、電磁解放機構を介して単に機械駆動手段のために使用可能であるが、電動機手段と共に使用されるのがよりよく、さらには装置のプロセッサによる制御自動化と共に使用されることが最も好ましい。
【0038】
実際に可能にされる、またはトリガされる操作は様々な性質のものである。送り出される投与量の機械制御、好ましくは電気制御を備える複数の投与量装置において、少なくとも注射に影響を及ぼすことは好ましい。自己注射タイプ装置においては自動穿入段階にもさらに影響を及ぼされ、好ましくは自動穿入および自動注射の順番が、可能ならば最終の針撤回とともに制御される。穿入段階で調合剤を送出したり、または穿入が完了した段階で、先ず注射を可能にする自己注射器は既知であり、本発明は両操作モードに適合する。既知であるオーバーフローまたはバイパス装置を有する複数室カートリッジの場合、注射手順は、麻酔薬、ついで活性材料または活性成分、さらにすすぎ成分など種々の調合剤の注射を順番どおりに行うことから成る。
【0039】
例えば、不連続、または連続の出力から種々の電磁信号を選択することによってプロセッサにおいて電子的に、あるいは、例えばセンサをハウジングに対して移動可能にさせることによって機械的に、臨界近接値が調整可能にされる場合、柔軟性はさらに増大する。装置は、針の長さ、カップリング、構造などの異なる管路の特徴と、皮下、静脈、脂肪、筋肉のような組織のタイプなどの異なる注射深度とに適応可能である。装置はさらに、標的組織のタイプにとって必要な局部穿入深度などの局部対象標的位置条件に適応可能である。尚、この適応可能にする操作は、本質的に既知の方法で装置が穿入力または注射圧力フィードバックなどに基づく、種々の標的タイプを識別する手段を備える場合、熟練したオペレータによって手動で、または自動的に行われることが可能である。
【0040】
センサが、無接触センサからの、あるいは通路に沿って連続のまたは複数の不連続の電磁信号を供給する変位可能な部材を有する接触センサからの連続信号のように異なる近接値のための異なる識別可能な電磁信号を送り出すことは好ましい。プリプログラム量の送出や、複数室の装置の場合で異なる深度での各成分の送出、さらには穿入深度の範囲にわたって連続的に大量の送出を行うなど、より進歩した投与パターンがセンサによって補助可能である。
【0041】
センサの電磁信号は、好ましくは、追加の貴重な情報を供給するために、絶対間隔値に関してだけでなく、前記間隔値の時間に対する変化に関してプロセッサによって分析されるとよい。所与の穿入力または注射背圧力とを組み合わせる場合、データは、組織のタイプなど対象の性質、適当な穿入以外のストロークまたはヒットなどの誤用、所定の適当な挿入速度にユーザーをガイドする方法などを表示する。
【0042】
センサ信号のすべての上記適用は、下記にさらに記述される装置の少なくともいくつかの電気機械手段の存在によって容易となる。
【0043】
信号処理
一般に、完全な有用性のために、装置は、センサの作動要素を駆動するため、またセンサから電磁信号を抽出するために、適当な電子回路と組み合わされるべきである。プロセッサの電子回路は、連続または不連続データの抽出のため少なくともセンサ出力を検知し、かつ例えば、例示されているあらゆる方法で、制御信号を介してセンサ出力を使用可能であるべきで、この目的のために、プロセッサは、操作構成要素に電磁信号を少なくとも適応させるか/または送出する。好ましい信号処理は、下記に例示される。
【0044】
センサからの電磁信号は、スイッチタイプのセンサ構成要素から受け取られるような簡単な信号オン/オフ信号であるが、単純なトリガリングまたはコマンドを可能にするなど多くの目的には十分である。擬連続信号は、例えば、変位通路に沿ってまたは機械的圧力による抵抗のレベルに従って、複数のオン/オフスイッチなどから受け取られる。真の連続信号は、上述した非接触タイプなどの多数のセンサ、圧力変換器、圧電装置すなわちドロッセル(drossel)、またはモーションセンサに基づく磁石から受け取られる。これら応答の使用例は、前述の項に示されている。
【0045】
簡単なオン/オフ信号は、電動機の簡単な起動回路用またはアナログ回路用のスイッチとして使用可能であるが、自動化または制御のために、より精巧な処理用のデジタル入力信号が好ましい。擬連続信号も同様に使用され、スイッチが並列に配置される場合、複数のスイッチの各スイッチは互いの間の区別を可能にし、またはオン/オフパルスが反復する連続信号として独立回路構成を有する。真の連続信号は、さらに、多くの情報を含み、オン/オフ信号に比べて別の方法で処理可能である。
【0046】
すべてのタイプの信号は、簡単な方法で使用されるが、いっそう精巧な方法で信号を使用すると、いくつかの利点がある。第1に、より多くのユーザー情報が信号から抽出される。第2に信号情報は、より確かな処理された信号を抽出するため、装置の応答のランダムファクタを補償するのに使用される。第三に、前述のハードウェアの特徴は、例えば、小型のまたは簡単な装置でも使用可能にするソフトウェアに置きかえられる。
【0047】
よって、センサ出力は、信号、例えば振幅対可変関数に関して直接的または間接的に監視され、作動前に処理される関数はセンサ出力に基く。変数は、例えば移動が監視されるとき、信号対距離の関数を形成する距離であるが、その変数は、時間対信号の関数を形成する時間であることが好ましい。得られる関数は連続関数として処理されるが、その値は、装置出力からサンプルされることが好ましい。この場合サンプリングは不規則であってもよいが、特定の周波数の規則的な時間間隔でサンプリングすることが好ましい。サンプリングは、既知のどの方法でもよい。サンプリングは、振幅が基準レベルと比較され、振幅が、固定でもよいが、可変の方が好ましい基準レベル以上か、または以下であるかにより、バイナリ1か、バイナリ0かのいずれかに設定されるという意味においてデジタルである。。とりわけ生のデータからさらに情報を抽出するためには、関数の絶対振幅値が繰り返して記録されるアナログサンプリング方法が一般に好ましい。アナログ値は、アナログプロセッサで処理可能であるが、多くの場合、その値をデジタルフォームに変換して、デジタルプロセッサで処理することが好ましい。信号は、本質的に既知の方法で、特定の周波数範囲または雑音を除去するためにフィルタに掛けられる。
【0048】
関数値は、いつでも、またいかなるレートででも記憶、処理されるが、一般にはリアルタイム処理が、ある所与時間で同時に処理されるべき値の記憶をさらに必要とするほとんどの適用において好ましい。処理は、同時に少なくとも2つ、好ましくは3つ、さらに複数の関数値を含むことが好ましい。処理は、あらゆる既知の種類のアナログまたはデジタルプロセッサで行われてよいが、標準のマイクロプロセッサのようなマイクロプロセッサまたはアプリケーション専用集積回路などを備えることが好ましい。
【0049】
処理は、記録のため、または例示されている何にかの目的のために即時アクションを行うべくあらゆる種類の時間に対する位置情報を抽出するように作動する。しかし、処理が、そのうえ、意図された目的のために装置の生の信号をより確実にするように、その信号を変更させることが好ましく、こうした変更のいくつかが例示されている。
【0050】
処理は、装置の物理的減衰またはセンサの移動に対するアナログを実行する。このことは連続休止位置において、例えば特定の周波数をフィルタに掛け、均衡点周囲の移動を平均すること、または回帰曲線を外挿することによって達成される。不連続休止位置においても同様の結果が、安定休止位置に対応する位置に対応する振幅の遅延または繰り返しチェックに基づいて得られる。
【0051】
処理は、例えば、不連続位置のため静的に、あるいは連続移動のため動的に、定めらた条件下での装置の実際の出力を記録するか、および/または駆動状態、周囲状態の変化など様々な妨害に対する装置の応答を記録することによって装置の較正を行う。
【0052】
処理は、例えば均衡点周囲の頻繁な跳躍を抑制すべく、1つの位置からもう1つの位置への変化に対応する信号を送るためにある程度の振幅の交番を要求することによって、装置の移動のための物理的ヒステリシスの供給に対するアナログを実行する。
【0053】
どの信号処理原理が適応されるかに関係なく、本文には特別に価値のあるいくつかの可能性が記載されている。機械的解決法とは異なって、信号処理は、操作のある種類または可逆性を供給することが好ましい。すなわち、恐らくはセンサ状態に基づいて操作シーケンスをトリガした後、シーケンスは、センサからの指図された信号状態により影響を及ぼされる。例えば位置が、穿入または注射などの現在の操作状態に対して適当な長さでないことをセンサが信号表示すると、装置は、ユーザーに警告し、ユーザーが修正処置をできるように、少なくとも制御信号を発することができなくてはならない。この場合、完全修正のため操作状態を停止し、また、恐らく次に続く注射の時間遅延により、補足的投与量または追加投与量を送り出すためプロセッサの再計算または再プログラミングすることが好ましい。
【0054】
可逆性という能力を便利に使用すると、さらに、上述のヒステリシスの特徴から利点が得られる。すなわち装置は、使用可能と使用不能、または操作と逆戻りとの間にかなりの許容範囲を与える。この特徴は、上記に例示された信号処理手段によって提供されるが、さらにセンサデザインによって、例えば、スイッチタイプセンサに所望の長さの接触表面を、または双安定スイッチに特定の非作動圧力範囲を有する機械的バイアスを与えることによっても提供される。
【0055】
装置は、さらに例えば、適当なカートリッジ識別、混合、脱気、遅延、投与量設定などの後に、操作シーケンスの所定のウインドウでのみセンサ出力に応答する自動化またはプロセッサ手段を備えることが好ましい。この手段は、適当な条件と不適当な条件の識別や、偶然か不慮かの確認をするために、さらに例えば、速度の変化、安定的変化の維持または変化のくり返しなどの特定の特徴的な判定基準を満たすセンサ出力にも応答する。
【0056】
ハードウェア
本発明のセンサシステムは、例えば、手動上反りスプリングシステムを有し、センサ信号が、警報、表示、信号目的のために使用されるときなど、全く手動で操作される送出装置、または機械的に駆動される装置にも利点を供給している。前述したように、センサ信号は自動化した装置に使用され、この目的のために、装置は、駆動用バッテリーなどのエネルギー蓄積手段を有する少なくとも1つの電気機械装置を備える始動手段を含むことが好ましい。センサと電気機械装置との接続には、種々の種類のものがある。センサ信号は、電気機械装置を直接に作動させる簡単なスイッチであってよい。記述されている追加の機能を可能にするためには、不連続構成要素を有するハードワイヤード回路か、好ましくは、汎用マイクロプロセッサ、またはアプリケーション専用集積回路などの汎用プロセッサ手段のいずれかによるさらに複雑な接続が必要となる。
【0057】
電気機械装置は、機械力を供給するために電気手段によって作動されうるものであればいかなる装置であってもよい。電気機械装置は、リレーまたは、ソレノイドタイプの装置、または好ましくは電動機がよい。少なくともポンプ機構は、電気機械手段によって制御されるか、あるいは作動されることが好ましい。好ましくは、別の機能も、電気手段によって制御可能であり、穿入手段はリターン可能な手段を有する。簡略化する場合は、これらの追加の能力は、それら自体の電気機械駆動手段を必要とせず、手動上反りスプリングなどの機械的手段、もしくは簡単な電気機械的手段により駆動される。しかし最高の柔軟性を得るために、例えば、ソレノイド、あるいは可能であれば別の電動機手段などの少なくとも電気機械解放手段が、このような追加機能のために必要である。
【0058】
(詳細な説明)
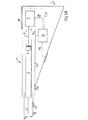
図1Aおよび図1Bは、移動可能なニードルカバーを組み込んでいるセンサを有する好ましい装置を概略的に示している。装置は、全体として1で示され、ハウジング2と、注射針4を有する前方端部および挿入ピストン5を有する開口部を有する注射器タイプ容器3とを備えている。ピストンは、電動機7で駆動されるプランジャ6によって作動される。針4のまわりには、針4がカバー前部の穴9から露出可能なように針と同軸にかつ針に沿って軸方向に移動可能なカバー8が配置されている。ハウジング2のスイッチ式要素11を作動するのに適している構造体10は、カバーに取り付けられるか、あるいはカバーと一体化している。図1Aにおいて、カバー8は、最前部位置にあり、針4全体を保護し、カバー構造体10は、スイッチ11とずらして配置されている。図1Bにおいて、装置1の前部を対象12と接触させて、針が対象に穿入した後方位置にカバーを引き込み、構造体10がスイッチ11と整列配置された場合の装置1の前部が示されている。カバーを、例えばスプリング(図示せず)によって図1Aに示されている最前部の位置に付勢されることが可能であれば好都合である。構造体10は、好ましくは、プラスチック材料のカバーに融着し取り付けられた小さなマグネットであり、スイッチ11は、回路にオン/オフ信号を与えるトングスイッチ素子のように磁界に応答して開閉するコンポーネントがよい。記述されている構成は、スイッチ11が構造体10によって作動される後方位置に、カバーが対象12によって変位されたとき、状態の変化が得られる近接センサを形成することは明確である。スイッチ11は、ハウジング2と針4とに関して固定して配置され、それによって、検知される近接もこれらの部分に対して所定の関係を持ち、ここでは、針に所与の穿入深度を持たせる。さらに、状態の変化は固有の電磁信号、ここではライン13を介して伝送されるオン/オフ信号の形に変換されることは明確である。信号は、点線14で表示されているように、例えば直接に電動機7を作動するために使用してよいが、特定のプロセッサ15に導く実線によって表示されるようにさらに精巧な方法で信号を処理することが好ましい。プロセッサ15は、例示されているタスクの何れをも実行する明細書の初めに例示されているプロセッサの何れでもよい。装置は、例えば、容器制御ルーチンや容器始動ルーチン、投与量設定および監視ルーチン、セルフコントロールルーチン、メッセージ発信ルーチンなどで少なくとも部分的に自動化されることが好ましい。また同一プロセッサが、上述のあらゆる自動機能の偶然のトリガリングの防止および/または積極的な確認を防止するために行う持続信号の簡単な検査など、少なくともこのようなルーチンのため、また本目的のために使用されることが好まれる。電動機7を作動する第1出力制御信号16およびディスプレイ18のメッセージを制御する第2制御信号が示されている。プロセッサ15は、適当な電磁信号13を受け取る時に制御信号を直接にトリガするように配置されてもよいが、また、手動トリガを掛ける前のエネーブル信号として、手動制御ボタン操作信号19を待ち、それによって適当な電磁信号13を処理するのが好ましい。2つの例において、プロセッサ15は、位置の顕著な変動を検知するためにライン13を監視し続け、それによって、例えば、ライン17に警告メッセージを発信し、おそらくは電動機のための作動信号16の中断するなどの制御信号の変化を発信することが好ましい。
【0059】
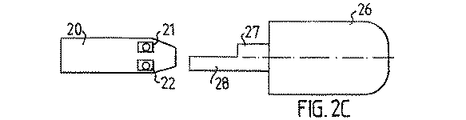
図2Aおよび図2B、図2Cは、2つの異なる針ガードと協働するスイッチを有する回路ボードを概略的に示している。回路ボード20は、図1に記述されている一般タイプの送出装置に使用されるよう意図され、ここに記述されているあらゆる目的のための回路構成また構成要素を備えている(図示せず)。回路ボードが、図2Bと図2Cとにそれぞれに示されている2つの異なる針カバー23と26とともにセンサシステムの部分を形成する第1と第2スイッチ21と22を有することがここでは重要である。図2Bに示されている針カバー23は、第1スイッチ21と協働するための上部が長いアーム24と、第2スイッチ22と協働するための下部が短いアーム25とを有する。針カバー23が、送出装置に適当に組み立てられると、長いアーム24は、カバーの前方および後方の移動に関係なく、常に第1スイッチ21を閉鎖するように構成され、それによって、電子回路がカバーの存在と適当な取り付けと、取り付けられるカバーのタイプとを確認できるようにする。短いアーム25は、針カバーが後方位置に移動されたときのみ第2スイッチ22を閉鎖するように構成されているが、針カバーが前方位置にあるとき、このスイッチは作動されない。図2Bにおいて、第1スイッチ21が、制御としての機能を果たし、第2スイッチ22が、検知システムの一部としての機能を果たすことは明確である。図2Cに示されるような針カバー26は、第1スイッチ21と協働するための上部アーム27が短いアームであり、また第2スイッチ22と協働するための下部アーム28が長いアームであることを除けば、図2Bのものと同一である。図2Cの状態において、第2スイッチ22が制御としての機能を果たし、第1スイッチ21が検知システムの一部としての機能を果たすことは明確である。さらに図2に記述されている構成は、どの針カバーが使用されているかに依存して、装置が異なった作動をするように針カバー23または26のどちらのタイプが取り付けられているかを区別できることも明確である。この能力の好ましい使用は、針カバータイプ23と26の1つがそれぞれに取り付けられるとき、さらなる作動をすることなく針カバータイプが後方位置に移動された場合、装置に自動的に流体を送り出させることである。しかし、その他の針カバータイプが取り付けられる場合、実際に送出をトリガするのに、さらなる作動が、好ましくは手動ボタンの作動が必要とされるので、針カバーが後方位置に移動されるときに、装置が可能にされるのみである。針カバー23と26は、別々の部品として記述されてはいるが、例えば、単一の針カバーの正反対の側に図2Bおよび図2Cそれぞれのアーム構造を配置し、かつ両側の間に針カバーの180度回転した変形を作成することによって、選択可能にスイッチと整列配置されることができる2つの異なるアームセットを有する単一の針カバーを備えることも等しく可能である。
【0060】
図3Aおよび図3Bは、図2と関連して記述された原理を利用する針カバーの好ましいデザインを2つの図で示している.図3Bに最も良く示されるように、針カバー30は、針カバーが後方に移動されるとき針露出用の前部穴32を有する本体31を備えている。脚部33と34が、後方端部の針カバーの取り付けのために送出装置の細長いスリット(図示せず)に配置され、この取り付けは、脚部と締め付けフリップ35との弾性によって容易となる。スリットによってガイドされ、針カバー30は、前方と後方位置の間で移動可能である。図3Aに最も良く示されるように、接触構造体36は針カバー30の本体31に配置される。接触構造体36には、長いアーム37と短いアーム38とが設けられている。アーム37と38は、図2に関連して記述されているアームと同一の機能を有する。すなわち長いアーム37は、1つのスイッチを装置に対して常に押され、また短いアーム38は、針の適当な長さが針カバーの外側に穴32を通って露出する後方位置に針カバー30が導かれるときにのみ、別のスイッチを装置に対して押される。
【0061】
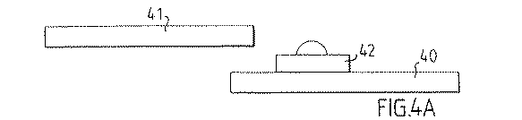
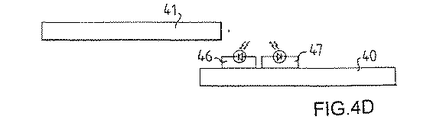
図4Aから図4Dは、センサに使用される代替スイッチ要素を概略的に示している。全図において、スイッチ要素の主要部分は、送出装置ハウジングに関して固定されたサポート40に取り付けられるのに対して、部分41は、逆のことも考えられるが、サポート40に対して移動可能である。可動部分41は、針カバーまたは記述されているその他の検知部分でよい。可動部分41は、図面の左側から右側に移動可能であると仮定される。図4Aにおいて、スイッチ要素42は、可動部分41によって下方に押されるとき、1つの状態から別の状態にフリップする双安定の接触プレートを収容する。図4Bにおいて、弾力性導電マットがサポート40と導電性パターンのギャプに押されるとき、スイッチ要素43は、同様に導通する。図4Cにおいて、スイッチ要素44は、ホール要素または舌状要素などのように磁界に感じる部分を備え、また可動部分41は、スイッチ44の状態の変化をひき起こすことが可能な磁気要素を備えている。図4Dにおいてスイッチは、放射、例えばIR発信機46と、可動部分41が受信機上に存在するか否かによって引き起こされる受信放射の変化を検知可能な放射受信機47とを備えている。
【図面の簡単な説明】
【図1A】 移動可能な針カバーを組み込んでいるセンサを有する好ましい装置を概略的に示し、延長位置と引込み位置のそれぞれにカバーを示している。
【図1B】 移動可能な針カバーを組み込んでいるセンサを有する好ましい装置を概略的に示し、延長位置と引込み位置のそれぞれにカバーを示している。
【図2A】 2つの異なる針ガードと協働するスイッチを有する回路ボードを概略的に示している。
【図2B】 2つの異なる針ガードと協働するスイッチを有する回路ボードを概略的に示している。
【図2C】 2つの異なる針ガードと協働するスイッチを有する回路ボードを概略的に示している。
【図3A】 図2と関連して記述されている原理を利用する針カバーの好ましいデザインを示している。
【図3B】 図2と関連して記述されている原理を利用する針カバーの好ましいデザインを示している。
【図4A】 代替スイッチ要素を概略的に示している。
【図4B】 代替スイッチ要素を概略的に示している。
【図4C】 代替スイッチ要素を概略的に示している。
【図4D】 代替スイッチ要素を概略的に示している。
Claims (14)
- a)ハウジング(2)と、b)前記ハウジングに配置され、開口部を有する注射器タイプの流体用容器(3)と、c)前記開口部と流体連通して接続される針(4)であって、前記容器から遠位のフロー点における前方端部と、前記容器への近位のフロー点における後方端部とを有し、前記前方端部および前記後方端部が、それらの間に軸と、前方方向および後方方向とを画定する針(4)と、d)針(4)を通って容器から少なくとも一方向に流体を送り出すように構成されるポンプ(5、6)とを備える注射装置であって、
センサ状態を電磁信号に変換しうるスイッチタイプのセンサ(10、11)と、電磁信号を受けとり、かつ前記注射装置の作動構成要素に制御信号(16)を送リ出すプロセッサ(15)と、を備え、作動構成要素は、使用者にメッセージを発するように構成されたメッセージ装置(18)若しくは電気機械装置(7)を含み、センサ(10、11)は、前方方向における対象(12)のセンサに対する所定の近接に応答して少なくとも1つの点で状態が変化し、前記注射装置が、針(4)を覆うように構成され、かつ実質的に針の軸方向の経路に沿って移動可能な針カバー(8)を備え、センサ(10、11)が、針カバーが前記経路に沿った所定の引き込み位置にあることに応答して状態を変化させることができる、注射装置。 - 前記注射器タイプの流体用容器(3)が、細長いバレルと、該バレル内に配置された可動壁(5)とを備え、容器開口部と該可動壁(5)との間で室が形成されることを特徴とする請求項1に記載の装置。
- 前記注射器タイプの流体用容器(3)が、少なくとも1つの中間壁によって少なくとも2つの室に分割されることを特徴とする請求項2に記載の装置。
- 前記ポンプ(5、6)が、シリンダとピストン(5)とを備えることを特徴とする請求項1に記載の装置。
- 前記ポンプ(5、6)が、電気的に作動されることを特徴とする請求項1に記載の装置。
- 前記プロセッサが、時間対信号の関数を処理するように構成された信号処理回路を備えることを特徴とする請求項1に記載の装置。
- 前記装置が手動キーを備え、前記プロセッサ(15)が、前記手動キーが操作されるか、または操作されている場合のみ制御信号(16)を送り出すように構成されることを特徴とする請求項1に記載の装置。
- 前記制御信号が電気機械装置を使用可能、または使用不能にするように接続されることを特徴とする請求項1に記載の装置。
- 前記電気機械装置(7)が、リレー、ソレノイド、電動機またはそれらの組み合わせの1つを備えることを特徴とする請求項8に記載の装置。
- 前記電気機械装置が、少なくともポンプ(5、6)を作動、または停止するように構成されることを特徴とする請求項8に記載の装置。
- 少なくとも前記針前方端部が前記ハウジング(2)に対して移動可能に配置され、前記電気機械装置(7)がその移動を開始するか、または停止するように構成されることを特徴とする請求項10に記載の装置。
- 前記開始、または停止される移動が、前方および/または後方方向であることを特徴とする請求項11に記載の装置。
- 針が前記対象(12)に穿入することなく、センサの状態変化が起こることを特徴とする請求項1に記載の装置。
- 前記センサ( 10、11)が、前記ハウジング(2)に対して固定された、前記所定の近接位置に配置されることを特徴とする請求項1から13のいずれか一項に記載の装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE9702872A SE9702872D0 (sv) | 1997-08-06 | 1997-08-06 | Automated delivery device and method for its operation |
| SE9702872-4 | 1997-08-06 | ||
| PCT/SE1998/001440 WO1999007425A1 (en) | 1997-08-06 | 1998-08-06 | Automated delivery device and method for its operation |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001513371A JP2001513371A (ja) | 2001-09-04 |
| JP4149657B2 true JP4149657B2 (ja) | 2008-09-10 |
Family
ID=20407881
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000507010A Expired - Lifetime JP4149657B2 (ja) | 1997-08-06 | 1998-08-06 | 自動化送出装置 |
Country Status (22)
| Country | Link |
|---|---|
| EP (1) | EP1001821B1 (ja) |
| JP (1) | JP4149657B2 (ja) |
| KR (1) | KR100551504B1 (ja) |
| CN (1) | CN1177625C (ja) |
| AT (1) | ATE340598T1 (ja) |
| AU (1) | AU738918B2 (ja) |
| BR (1) | BR9811133A (ja) |
| CA (1) | CA2298739C (ja) |
| CY (1) | CY1106192T1 (ja) |
| DE (1) | DE69836026T2 (ja) |
| DK (1) | DK1001821T3 (ja) |
| ES (1) | ES2272006T3 (ja) |
| HU (1) | HU224991B1 (ja) |
| IL (1) | IL134379A (ja) |
| NO (1) | NO323144B1 (ja) |
| PL (1) | PL190811B1 (ja) |
| PT (1) | PT1001821E (ja) |
| RU (1) | RU2192894C2 (ja) |
| SE (1) | SE9702872D0 (ja) |
| TW (1) | TW396041B (ja) |
| WO (1) | WO1999007425A1 (ja) |
| ZA (1) | ZA986966B (ja) |
Families Citing this family (73)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10009815B4 (de) * | 2000-03-01 | 2009-07-16 | Tecpharma Licensing Ag | Injektionsgerät mit einer Nadelabdeckung |
| US6663602B2 (en) | 2000-06-16 | 2003-12-16 | Novo Nordisk A/S | Injection device |
| AU2001289589A1 (en) | 2000-09-22 | 2002-04-02 | Novo-Nordisk A/S | A medication delivery device |
| IL156245A0 (en) | 2000-12-22 | 2004-01-04 | Dca Design Int Ltd | Drive mechanism for an injection device |
| ZA200200808B (en) * | 2001-03-22 | 2002-08-12 | Roche Diagnostics Gmbh | Needleless hypodermic injection system, application device and medication cartridge therefor. |
| WO2003057286A1 (fr) | 2001-12-13 | 2003-07-17 | Matsushita Electric Industrial Co., Ltd. | Instrument d'administration a usage medical |
| JP4688853B2 (ja) * | 2001-12-13 | 2011-05-25 | パナソニック株式会社 | 医療用投与器具 |
| EP2286857A1 (en) | 2002-07-02 | 2011-02-23 | Panasonic Corporation | Automatic administration instrument for medical use |
| JP4339260B2 (ja) * | 2002-11-25 | 2009-10-07 | テクファーマ・ライセンシング・アクチェンゲゼルシャフト | 針保護装置を有する注射装置 |
| DE10330984B4 (de) * | 2003-07-09 | 2009-12-10 | Tecpharma Licensing Ag | Injektionsgerät mit Positionssensor |
| JP4722849B2 (ja) * | 2003-09-12 | 2011-07-13 | マイルストーン サイアンティフィック インク | 圧力検知を使用した組織を同定した薬剤注入装置 |
| GB2406283B (en) | 2003-09-24 | 2006-04-05 | Altana Pharma Ag | Compliance monitor and method |
| WO2005077441A2 (en) * | 2004-02-18 | 2005-08-25 | Ares Trading S.A. | Hand-held electronically controlled injection device for injecting liquid medications |
| JP4507671B2 (ja) * | 2004-03-31 | 2010-07-21 | パナソニック株式会社 | 医療用投与器具 |
| ATE444090T1 (de) | 2004-10-21 | 2009-10-15 | Novo Nordisk As | Wählmechanismus für einen drehstift |
| EP2532378B1 (en) | 2004-12-01 | 2016-04-27 | AcuShot, Inc. | Needle-free injector |
| US8361026B2 (en) | 2005-02-01 | 2013-01-29 | Intelliject, Inc. | Apparatus and methods for self-administration of vaccines and other medicaments |
| US8231573B2 (en) | 2005-02-01 | 2012-07-31 | Intelliject, Inc. | Medicament delivery device having an electronic circuit system |
| US9022980B2 (en) | 2005-02-01 | 2015-05-05 | Kaleo, Inc. | Medical injector simulation device |
| US8206360B2 (en) | 2005-02-01 | 2012-06-26 | Intelliject, Inc. | Devices, systems and methods for medicament delivery |
| PL2058020T3 (pl) * | 2005-02-01 | 2013-03-29 | Kaleo Inc | Urządzenie do podawania leków |
| CN101116077A (zh) * | 2005-02-11 | 2008-01-30 | 卡迪纳尔健康303公司 | 用于药物管理的识别系统和方法 |
| DE102005025639B4 (de) * | 2005-06-03 | 2011-04-07 | Innovacell Biotechnologie Gmbh | Injektionsvorrichtung |
| US7988660B2 (en) * | 2005-12-20 | 2011-08-02 | Eli Lilly And Company | Needle-free injection device |
| CN101400391B (zh) * | 2006-02-09 | 2014-02-12 | 德卡产品有限公司 | 流体输送系统和方法 |
| US9008764B2 (en) | 2006-03-20 | 2015-04-14 | Novo Nordisk A/S | Determination of position of injection needle |
| AU2011218649B8 (en) * | 2006-03-29 | 2015-11-19 | Kaleo, Inc. | Devices, systems and methods for medicament delivery |
| DE602007004972D1 (de) | 2006-05-16 | 2010-04-08 | Novo Nordisk As | Getriebemechanismus für ein injektionsgerät |
| AU2007253481B2 (en) | 2006-05-18 | 2013-01-17 | Novo Nordisk A/S | An injection device with mode locking means |
| BRPI0717260A2 (pt) | 2006-09-29 | 2013-10-15 | Novo Nordisk As | Dispositivos de injeção com meio de detecção eletrônica |
| EP2125075A2 (en) | 2007-01-22 | 2009-12-02 | Intelliject, Inc. | Medical injector with compliance tracking and monitoring |
| EP2164544A1 (en) * | 2007-07-06 | 2010-03-24 | Novo Nordisk A/S | Automatic injection device |
| WO2009024562A1 (en) | 2007-08-17 | 2009-02-26 | Novo Nordisk A/S | Medical device with value sensor |
| EP2113268A1 (en) | 2008-04-30 | 2009-11-04 | F. Hoffmann-Roche AG | Administering device with safety features |
| USD994111S1 (en) | 2008-05-12 | 2023-08-01 | Kaleo, Inc. | Medicament delivery device cover |
| US7959598B2 (en) | 2008-08-20 | 2011-06-14 | Asante Solutions, Inc. | Infusion pump systems and methods |
| EP2437808A2 (en) * | 2009-06-03 | 2012-04-11 | Novo Nordisk A/S | Injection device having electronic dosis monitor |
| EP3578215B1 (en) * | 2010-11-12 | 2024-04-24 | Sanofi-Aventis Deutschland GmbH | Drug delivery device and method for a drug delivery device |
| EP2468339A1 (en) * | 2010-12-21 | 2012-06-27 | Sanofi-Aventis Deutschland GmbH | Auto-injector |
| EP2468340A1 (en) | 2010-12-21 | 2012-06-27 | Sanofi-Aventis Deutschland GmbH | Auto injector with an interlock switch detecting the position of the needle shroud |
| US8627816B2 (en) | 2011-02-28 | 2014-01-14 | Intelliject, Inc. | Medicament delivery device for administration of opioid antagonists including formulations for naloxone |
| US8939943B2 (en) | 2011-01-26 | 2015-01-27 | Kaleo, Inc. | Medicament delivery device for administration of opioid antagonists including formulations for naloxone |
| US9173999B2 (en) | 2011-01-26 | 2015-11-03 | Kaleo, Inc. | Devices and methods for delivering medicaments from a multi-chamber container |
| BR112014001088A8 (pt) * | 2011-07-18 | 2018-02-06 | Liebel Flarsheim Co Llc | Sistema de injeção e método de operar um sistema de injeção |
| US9408972B2 (en) * | 2011-08-02 | 2016-08-09 | Pharmajet, Inc. | Needle-free injection device |
| EP3922288A1 (en) | 2011-11-22 | 2021-12-15 | Sanofi-Aventis Deutschland GmbH | Drive mechanism for a drug delivery device |
| JP6069351B2 (ja) | 2011-12-29 | 2017-02-01 | ノボ・ノルデイスク・エー/エス | ダイアルアップ/ダイアルダウン投与機構を有するねじりバネ式ねじ巻き自動注射器 |
| US10525201B2 (en) * | 2012-05-31 | 2020-01-07 | Shl Medical Ag | Medicament delivery device |
| CN104602736B (zh) | 2012-09-05 | 2018-04-20 | E3D农业合作协会有限公司 | 电子自动注射设备 |
| CA2896708A1 (en) | 2012-12-27 | 2014-07-03 | Kaleo, Inc. | Devices, systems and methods for locating and interacting with medicament delivery systems |
| US9561324B2 (en) | 2013-07-19 | 2017-02-07 | Bigfoot Biomedical, Inc. | Infusion pump system and method |
| SG10201903244UA (en) * | 2013-11-14 | 2019-05-30 | Ares Trading Sa | Medicine injection device with a pain-reduction member |
| JP6242175B2 (ja) * | 2013-11-14 | 2017-12-06 | 学校法人近畿大学 | 魚体注射装置 |
| US10729852B2 (en) | 2014-02-17 | 2020-08-04 | Noble International, Inc. | Wet injection detection and prevention system and method |
| CN103768679B (zh) | 2014-02-20 | 2016-08-24 | 江苏多维科技有限公司 | 精密注射器泵及其制造方法 |
| WO2015158230A1 (zh) | 2014-04-14 | 2015-10-22 | 江苏多维科技有限公司 | 一种使用磁电阻传感器的微型导螺杆泵及其制造方法 |
| WO2015187802A1 (en) * | 2014-06-03 | 2015-12-10 | Amgen Inc. | Devices and methods for assisting a user of a drug delivery device |
| US9517307B2 (en) | 2014-07-18 | 2016-12-13 | Kaleo, Inc. | Devices and methods for delivering opioid antagonists including formulations for naloxone |
| US9872633B2 (en) * | 2014-09-29 | 2018-01-23 | Becton, Dickinson And Company | Cannula insertion detection |
| KR101675476B1 (ko) * | 2014-11-28 | 2016-11-22 | 김근식 | 니들장치 및 이를 포함하는 주사기기 |
| US9878097B2 (en) | 2015-04-29 | 2018-01-30 | Bigfoot Biomedical, Inc. | Operating an infusion pump system |
| MX2017016657A (es) | 2015-06-19 | 2018-11-09 | Janssen Pharmaceutica Nv | Dispositivos y metodos para administracion y mezcla de farmaco, y entrenamiento de tecnicas apropiadas para ello. |
| US10918796B2 (en) * | 2015-07-03 | 2021-02-16 | Ferrosan Medical Devices A/S | Syringe for mixing two components and for retaining a vacuum in a storage condition |
| WO2017029703A1 (ja) * | 2015-08-18 | 2017-02-23 | 株式会社ダイセル | 無針注射器 |
| AU2016385454B2 (en) | 2016-01-05 | 2021-12-16 | Bigfoot Biomedical, Inc. | Operating multi-modal medicine delivery systems |
| US10646374B2 (en) * | 2016-06-17 | 2020-05-12 | Orbit Biomedical Limited | Apparatus and method to form entry bleb for subretinal delivery of therapeutic agent |
| WO2018136413A2 (en) | 2017-01-17 | 2018-07-26 | Kaleo, Inc. | Medicament delivery devices with wireless connectivity and event detection |
| RU2762331C2 (ru) | 2017-06-29 | 2021-12-17 | Ассендис Фарма А/С | Автоматический инъектор с поддержкой манипуляций по восстановлению препарата |
| CN111032123B (zh) * | 2017-08-11 | 2022-08-05 | 豪夫迈·罗氏有限公司 | 用于医疗设备的透镜状标签 |
| US11929160B2 (en) | 2018-07-16 | 2024-03-12 | Kaleo, Inc. | Medicament delivery devices with wireless connectivity and compliance detection |
| WO2022032024A1 (en) * | 2020-08-07 | 2022-02-10 | West Pharmaceutical Services, Inc. | Injection device and method of indicating an injection status for an injection device |
| IT202100026348A1 (it) * | 2021-10-14 | 2023-04-14 | Univ Campus Bio Medico Di Roma | Dispositivo per somministrazione sottocutanea |
| USD1007676S1 (en) | 2021-11-16 | 2023-12-12 | Regeneron Pharmaceuticals, Inc. | Wearable autoinjector |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4142795C1 (ja) * | 1991-12-23 | 1993-04-22 | Steinweg, Friedhelm, Dr.Med., 4750 Unna, De | |
| DE4420232A1 (de) * | 1994-06-07 | 1995-12-14 | Robert Waltereit | Vorrichtung zur Prüfung der Eindringtiefe einer Kanüle oder Sonde in den Körper eines Patienten |
-
1997
- 1997-08-06 SE SE9702872A patent/SE9702872D0/xx unknown
-
1998
- 1998-07-29 TW TW087112480A patent/TW396041B/zh not_active IP Right Cessation
- 1998-08-04 ZA ZA986966A patent/ZA986966B/xx unknown
- 1998-08-06 DE DE69836026T patent/DE69836026T2/de not_active Expired - Lifetime
- 1998-08-06 CN CNB988080060A patent/CN1177625C/zh not_active Expired - Fee Related
- 1998-08-06 BR BR9811133-7A patent/BR9811133A/pt not_active IP Right Cessation
- 1998-08-06 AU AU85655/98A patent/AU738918B2/en not_active Ceased
- 1998-08-06 EP EP98936780A patent/EP1001821B1/en not_active Expired - Lifetime
- 1998-08-06 PT PT98936780T patent/PT1001821E/pt unknown
- 1998-08-06 RU RU2000105339/14A patent/RU2192894C2/ru not_active IP Right Cessation
- 1998-08-06 DK DK98936780T patent/DK1001821T3/da active
- 1998-08-06 HU HU0004832A patent/HU224991B1/hu not_active IP Right Cessation
- 1998-08-06 IL IL13437998A patent/IL134379A/xx not_active IP Right Cessation
- 1998-08-06 PL PL338447A patent/PL190811B1/pl not_active IP Right Cessation
- 1998-08-06 WO PCT/SE1998/001440 patent/WO1999007425A1/en active IP Right Grant
- 1998-08-06 AT AT98936780T patent/ATE340598T1/de not_active IP Right Cessation
- 1998-08-06 CA CA002298739A patent/CA2298739C/en not_active Expired - Lifetime
- 1998-08-06 JP JP2000507010A patent/JP4149657B2/ja not_active Expired - Lifetime
- 1998-08-06 KR KR1020007001273A patent/KR100551504B1/ko not_active IP Right Cessation
- 1998-08-06 ES ES98936780T patent/ES2272006T3/es not_active Expired - Lifetime
-
2000
- 2000-02-04 NO NO20000580A patent/NO323144B1/no not_active IP Right Cessation
-
2006
- 2006-10-10 CY CY20061101444T patent/CY1106192T1/el unknown
Also Published As
| Publication number | Publication date |
|---|---|
| KR20010022678A (ko) | 2001-03-26 |
| PL338447A1 (en) | 2000-11-06 |
| NO20000580L (no) | 2000-04-06 |
| DK1001821T3 (da) | 2007-01-08 |
| CA2298739A1 (en) | 1999-02-18 |
| CY1106192T1 (el) | 2011-06-08 |
| TW396041B (en) | 2000-07-01 |
| HUP0004832A3 (en) | 2004-03-01 |
| IL134379A0 (en) | 2001-04-30 |
| EP1001821A1 (en) | 2000-05-24 |
| DE69836026D1 (de) | 2006-11-09 |
| CN1177625C (zh) | 2004-12-01 |
| HUP0004832A2 (hu) | 2001-05-28 |
| PT1001821E (pt) | 2007-01-31 |
| ATE340598T1 (de) | 2006-10-15 |
| CA2298739C (en) | 2007-10-16 |
| BR9811133A (pt) | 2000-07-18 |
| ZA986966B (en) | 1999-02-08 |
| AU8565598A (en) | 1999-03-01 |
| HU224991B1 (en) | 2006-05-29 |
| PL190811B1 (pl) | 2006-02-28 |
| JP2001513371A (ja) | 2001-09-04 |
| NO323144B1 (no) | 2007-01-08 |
| CN1266373A (zh) | 2000-09-13 |
| ES2272006T3 (es) | 2007-04-16 |
| RU2192894C2 (ru) | 2002-11-20 |
| IL134379A (en) | 2005-07-25 |
| AU738918B2 (en) | 2001-09-27 |
| NO20000580D0 (no) | 2000-02-04 |
| DE69836026T2 (de) | 2007-03-15 |
| EP1001821B1 (en) | 2006-09-27 |
| KR100551504B1 (ko) | 2006-02-13 |
| SE9702872D0 (sv) | 1997-08-06 |
| WO1999007425A1 (en) | 1999-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4149657B2 (ja) | 自動化送出装置 | |
| US6547755B1 (en) | Automated delivery device and method for its operation | |
| CA2693913C (en) | Modular drug delivery device for administering discrete doses of a medicament | |
| US5354287A (en) | Injector for delivering fluid to internal target tissue | |
| JP5093822B2 (ja) | 医療用の自動小型注入およびサンプル採取デバイス | |
| CZ20003736A3 (cs) | Zařízení na podávání léčiv s počítačem řízeným tlakem a silou | |
| JP6553216B2 (ja) | 回転ポンプ機構を有する輸液装置用閉塞検出技術 | |
| EP1696983A2 (en) | Nozzle device with skin stretching means | |
| WO2012004298A1 (en) | System for indicating lifetime status for medical component | |
| US20170319790A1 (en) | Drug Delivery Device with Air-in-Cartridge Safety Feature | |
| US11433185B2 (en) | Injection device | |
| CN115209930A (zh) | 具有用于控制输送速率的经改进机构的药物输送装置 | |
| EP4122511A1 (en) | Monitoring a dispensing process with a drug delivery device | |
| CZ2000405A3 (cs) | Automatizované dávkovači zařízení a způsob jeho použití | |
| WO2024010937A1 (en) | System and method for detecting priming of a fluid path of a drug delivery device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050712 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070814 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20071108 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20071126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080610 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080626 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110704 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110704 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120704 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130704 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |