JP4052504B2 - 生体組織の弾力特性測定装置 - Google Patents
生体組織の弾力特性測定装置 Download PDFInfo
- Publication number
- JP4052504B2 JP4052504B2 JP2002020178A JP2002020178A JP4052504B2 JP 4052504 B2 JP4052504 B2 JP 4052504B2 JP 2002020178 A JP2002020178 A JP 2002020178A JP 2002020178 A JP2002020178 A JP 2002020178A JP 4052504 B2 JP4052504 B2 JP 4052504B2
- Authority
- JP
- Japan
- Prior art keywords
- probe
- hardness
- living tissue
- living
- tissue
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/22—Ergometry; Measuring muscular strength or the force of a muscular blow
- A61B5/224—Measuring muscular strength
- A61B5/227—Measuring muscular strength of constricting muscles, i.e. sphincters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1076—Measuring physical dimensions, e.g. size of the entire body or parts thereof for measuring dimensions inside body cavities, e.g. using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/20—Measuring for diagnostic purposes; Identification of persons for measuring urological functions restricted to the evaluation of the urinary system
- A61B5/202—Assessing bladder functions, e.g. incontinence assessment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6885—Monitoring or controlling sensor contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4519—Muscles
Description
【発明の属する技術分野】
本発明は、生体組織の弾力特性測定装置に関する。
【0002】
【従来の技術】
婦人の出産後、または加齢が進むにつれ、尿道を支えていた筋肉が伸びきって、その弾性が低下し、ちょっとした衝撃で失禁を起こしやすくなる。そのため、例えば骨盤に支え穴を設けて、その穴を利用し、尿道周辺の筋肉を吊り上げ、尿道を支える筋肉の弾性を回復させる手術が行われる。適切な手術のためには、尿道を取り囲む筋肉の弾力特性の評価が必要である。
【0003】
【発明が解決しようとする課題】
尿道は膣のごく近傍にあるので、膣の管部内部の生体組織につきその弾性を把握することで、尿道を取り囲む筋肉の弾力特性の評価を行える。しかし、尿道を取り囲む筋肉の機能の一つは、尿道を適度の弾力で拡張させ、また収縮させることであるので、応力とひずみの単純な比であらわされる生体組織の弾性係数ではその弾力特性、例えば粘弾性特性の十分な評価ができない。また、膣はその径が約15mm程度あるので、管部に探触子を挿通することは可能であるが、膣の管部を取り囲み、尿道を支える筋肉について、上述の弾力特性を測定できる適切な探触子および測定方法がない。したがって、尿道付近の筋肉についての弾性低下の程度や、弾性を回復させるための支え穴への筋肉の吊り上げ程度は、術者の手による触診等、経験に頼る診断により判断されているのが現状である。
【0004】
本発明の目的は、かかる従来技術の課題を解決し、生体の管部に挿通し、管部内側の生体組織の弾力特性を定量的に測定できる、生体組織の弾力特性測定装置を提供することである。
【0005】
【課題を解決するための手段】
上述の目的を達成するため、本発明に係る生体組織の弾力特性測定装置は、生体の管部に挿通し、管部内側の組織の弾力特性を測定する生体組織の弾力特性測定装置であって、探触子を保持し、生体の管部に挿通する探触子基部と、探触子基部の外側に配置される管状のスリーブと、探触子基部の外周にバネによって取付けられ、生体の管部内側の生体組織に近接配置され、生体組織に対し押付け戻し駆動される探触子と、探触子に設けられ、押付け戻し駆動されるときの生体組織からの反力から、生体組織に与える応力を検出する応力検出センサと、探触子基部に対する応力検出センサの変位量を検出する変位量検出センサと、を備え、探触子基部とスリーブとの間の相対運動によってバネが押付け戻されることによって、探触子の全体をスリーブの内部に収納し、また探触子をスリーブの内部から出して生体組織に押付け戻し、押付け戻されるときの応力−変位量特性から生体の弾力特性を測定することを特徴とする。
【0006】
また、本発明に係る生体組織の弾力特性測定装置は、生体の管部に挿通し、管部内側の組織の弾力特性を測定する生体組織の弾力特性測定装置であって、探触子を保持し、生体の管部に挿通する探触子基部と、探触子基部の外側に配置される管状のスリーブと、探触子基部の外周にバネによって取付けられ、生体の管部内側の生体組織に近接配置され、生体組織に対し押付け戻し駆動される探触子と、探触子に設けられ、生体の硬さに関する信号を出す硬さセンサ部と、硬さセンサ部からの信号に基づき生体の硬さを検出する硬さ検出手段と、探触子基部に対する硬さセンサ部の変位量を検出する変位量検出センサと、を備え、探触子基部とスリーブとの間の相対運動によってバネが押付け戻されることによって、探触子の全体をスリーブの内部に収納し、また探触子をスリーブの内部から出して生体組織に押付け戻し、押付け戻されるときの硬さ特性から生体の弾力特性を測定することを特徴とする。
【0008】
また、本発明に係る生体組織の弾力特性測定装置において、前記硬さセンサ部は、振動子と、振動検出センサとが設けられ、振動子に接続される入力端子と、振動検出センサに接続される出力端子を備え、前記硬さ検出手段は、前記硬さセンサ部の出力端子に入力端が接続される増幅器と、増幅器の出力端と前記硬さセンサ部の入力端子との間に設けられ、前記振動子への入力波形と振動検出センサからの出力波形に位相差が生じるときは、周波数を変化させて前記位相差をゼロにシフトする位相シフト回路と、を備え、硬さセンサ部と生体組織を含む閉ループの共振状態を維持しつつ、生体組織の硬さが変化することで生ずる前記周波数変化から、生体組織の硬さを検出することが好ましい。
【0009】
本発明に係る生体組織の弾力特性測定装置は、探触子を保持し、生体の管部に挿通する探触子基部と、探触子基部に取付けられ、生体の管部内側の生体組織に近接配置され、生体組織に対し押付け戻し駆動される探触子を備える。そして、生体組織に対し探触子を押付け戻すときの、生体組織への圧力である接触圧、すなわち応力について、そのヒステリシスを応力検出センサで検出し、また、変位量検出センサで、探触子基部に対する応力検出センサの変位量、すなわち生体組織の拡張、収縮の変位量のヒステリシスも検出する。これらのヒステリシスのデータから、生体組織の応力−変位量特性のヒステリシスを評価し、生体の弾力特性、例えば粘弾性特性を定量的に測定することができる。
【0010】
また、本発明に係る生体組織の弾力特性測定装置は、探触子を保持し、生体の管部に挿通する探触子基部と、探触子基部に取付けられ、生体の管部内側の生体組織に近接配置され、生体組織に対し押付け戻し駆動される探触子を備える。そして、生体組織に対し探触子を押付け戻すときの、生体組織の硬さのヒステリシスを、探触子に設けられた硬さセンサ部の信号に基づいて硬さ検出手段で検出し、また、変位量検出センサで、探触子基部に対する硬さセンサ部の変位量、すなわち生体組織の拡張、収縮の変位量のヒステリシスも検出する。これらのヒステリシスのデータから、生体組織の硬さ−変位量特性のヒステリシスを評価できる。硬さは、応力とひずみの比である弾性係数に密接に関係するので、そのヒステリシスの評価から、生体の弾力特性を定量的に測定することができる。
【0011】
探触子の押付け戻し駆動は、板ばねとモータ機構のほか、流体圧による膨張収縮自在のバルーンを用いて行うことができる。
【0012】
また、本発明に係る生体組織の弾力特性測定装置において、前記硬さセンサ部の出力端子に入力端が接続される増幅器と、増幅器の出力端と前記硬さセンサ部の入力端子との間に設けられ、前記振動子への入力波形と振動検出センサからの出力波形に位相差が生じるときは、周波数を変化させて前記位相差をゼロにシフトする位相シフト回路とを備える。このような構成で、硬さセンサ部と生体組織を含む閉ループの共振状態維持のもとで、生体組織の硬さが変化することで生ずる前記周波数変化から、生体組織の硬さを定量的に検出することができ、硬さのヒステリシスの定量的評価につき信頼性が高まる。
【0013】
【発明の実施の形態】
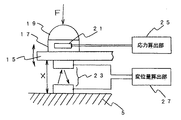
以下、図面を用いて、本発明に係る実施の形態について詳細に説明する。図1は、弾力特性測定装置1が、生体の管部3に挿通されている状態を示した図である。弾力特性測定装置1は、数mm角または直径数mmの長棒状の探触子基部5と、探触子基部5に取付けられ、管部3の内側の生体組織に先端が接触し、生体組織に対し押付け戻し駆動される探触子7を備える。探触子基部5の外側に、探触子基部5の外形より一回り大きな内径を有し、探触子基部5の長手軸方向に移動自在のスリーブ9が設けられる。
【0014】
探触子7は、探触子基部5の外周に取付けられた板ばね15の先端に、応力検出基台17を備えた略半球状のプラスチック製の接触ボール19が取付けられ、応力検出基台17に応力検出センサ21が貼り付けられる。また、板バネ15の応力検出基台17が取付けられる側と反対側と、それに対向する探触子基部5の表面とに、一対の変位量検出センサ23が配置される。応力検出センサ21、変位量検出センサ23は、それぞれ信号線で応力算出部25、変位量算出部27と接続され、応力算出部25、変位量算出部27の出力は、弾性特性算出部29に接続される。探触子7は、探触子基部5の外周に対称な配置で四個設けられる。
【0015】
図2は、探触子基部5と、その外側に配置されたスリーブ9とが、軸方向に相対的に移動するときの、探触子7の動きを説明する図である。スリーブ9が、探触子基部5に対し、例えば図2において左側に移動すると、スリーブ9のパイプ状の内側が、探触子7の板ばね15に押し当てられ、さらに左側に移動するにつれ、板ばね15を探触子基部5側に押付けるように働く。したがって、探触子7の先端の接触ボール19は、スリーブ9が左側に移動するにつれ下向きに動き、スリーブ9が右側に移動するときは上側に動く。このように、スリーブ9と探触子基部5との間の相対運動により、探触子7の先端の接触ボール19を、生体組織に対し、押付け戻し駆動をさせることができる。スリーブ9と探触子基部5との間の相対運動は、図示されていない小型モータにより行うことができる。また、簡単な測定においては、術者の手による操作によってスリーブ9と探触子基部5との相対的移動を行うこともできる。
【0016】
スリーブ9の左側の移動により、接触ボール19を含み探触子7全体をスリーブ9の内部に収納することもできる。この場合は、複雑な機構の探触子7をスリーブ9の内部に収納した状態で、生体の弾力特性測定装置1を生体の管部における所定の測定部位まで挿通でき、挿通がスムーズに行える。そして、所定の測定部位において、スリーブ9を移動させることにより、管部内部で四個の探触子7を傘状に開き、すぼめることができる。探触子の数は、四個の他に、例えば一個、二個、三個、六個等他の数でも良い。
【0017】
生体組織に対し押付け戻し駆動される探触子は、上述の板ばね構造のほかに、流体圧により膨脹伸縮自在のバルーンを用いることができる。図3にバルーン11を探触子基部5に取付けた場合を示す。バルーン11は、ポンプ13に接続され、ポンプ13の圧力を調整することで、生体組織に対し押付け戻し駆動されることができる。
【0018】
図4は、探触子7の先端部分につき詳細に示した図である。探触子7の先端部は、板ばね15の先端の、生体組織に対向する一方側の面上に、応力検出基台17を備えた略半球状のプラスチック製の接触ボール19が接着により取付けられ、応力検出基台17に、応力検出センサ21が配置される。応力検出センサ21は、ひずみゲージで、接着により、応力検出基台17にしっかり貼り付けられる。また、板バネ15の応力検出基台17が取付けられる側と反対側に受光素子が設けられ、またそれに対向して探触子基部5の表面に発光素子が設けられ、この一対の発光素子と受光素子とで、変位量検出センサ23を構成する。応力検出センサ21、変位量検出センサ23は、それぞれ信号線で応力算出部25、変位量算出部27と接続される。応力検出基台17と接触ボール19とは、同じ材料で構成するほか、別々の材料を用いこれらを積層構造で形成してもよい。変位量検出センサは、一対の発光素子と受光素子のほか、一対の磁石と磁気センサ等、他の小型の近接センサを用いることもできる。
【0019】
上記構成の作用について説明する。探触子基部5の外周に対称に配置された四個の探触子7を、傘状にすぼめた状態で、探触子基部5を生体の管部、例えば患者の膣に挿通する。そして、生体組織の弾力特性を測定したい箇所において、スリーブ9を探触子基部5に対し、図1において徐々に右側に移動し、探触子7を傘状に開く。そのことで、接触ボール19が、生体組織側に動き、管部内部の生体組織に押付けられる。その後、スリーブ9を探触子基部5に対し、徐々に左側に戻し、探触子7をすぼめる。その押付け戻し駆動の時々刻々の生体組織からの反力Fは、接触ボール19が設けられた応力検出基台17に設けられた応力検出センサ21により検出される。応力検出センサ21がひずみゲージの場合は、抵抗値変化の信号となって、信号線により、応力算出部25に送られ、そこで演算処理され、応力に換算される。
【0020】
一方、探触子基部5に対する接触ボールの距離の変化、すなわち接触ボールが生体組織に対し、押付け戻し駆動された相対的な変位量は、変位量検出センサ23で検出される。すなわち、探触子基部5に対する接触ボールの距離が変化すると、発光素子と受光素子との間の距離が変化し、その距離に応じて、受光量変化の信号となって、信号線により変位量算出部27に送られ、そこで演算処理され、変位量が求められる。
【0021】
このようにして、生体組織に探触子が押付け戻し駆動の状態下で、応力Fと、変位量Xが対応して得ることができる。そこで、生体組織の所定の測定箇所で、探触子基部5の位置は固定し、図1の場合では、スリーブ9を探触子基部5に対し徐々に右側に移動させ、つぎに再び左側に徐々に戻す。このことで、接触ボールは生体組織に対し最初押付けられ、次に戻される。すなわち、このときの応力Fと、変位量Xの変化を対応付けることで、生体組織の弾力特性のヒステリシスを評価できる。図5に、所定の測定箇所において、探触子7を押付け戻し駆動したときの、生体組織の応力Fと変位量Xの変化を、縦軸に応力F、横軸に変位量Xとして示した例を示す。このように、弾力特性のヒステリシス曲線が得られるので、この曲線を用いて、生体組織の弾力特性が定量的に測定、評価できる。例えば、ヒステリシス曲線で囲まれた面積の大きさ等から、生体組織の粘弾性特性が定量的に評価できる。
【0022】
図6は、生体の管部の異なる三点における弾力特性の測定例を示す図である。探触子基部5の管部に挿通する深さを変えた三点A,B,Cのそれぞれにおいて、探触子7を管部内側の生体組織に押付け戻し駆動し、そのときの応力F、変位量Xのヒステリシス特性を求め、縦軸に応力F、横軸に変位量Xをとり、比較したものである。例えば、点Aにおけるヒステリシス特性と、点B,Cにおけるヒステリシス曲線を比べると、点Aにおける曲線のほうがヒステリシス曲線で囲まれた面積が小さく、より弾力に富むことが定量的に評価できることがわかる。
【0023】
上述のように、生体組織の応力とひずみとをそれぞれ測定し、その結果から、応力−ひずみ特性のヒステリシスを評価することで、生体組織の弾力特性の測定、評価を行うことができる。一方、硬さは、応力とひずみの比である弾性係数に密接に関係するので、硬さのヒステリシスの評価からも、生体の弾力特性を定量的に測定することができる。
【0024】
図7は、本発明の生体組織の弾性特性測定装置に係る、別の実施の形態における、硬さ検出の部分のブロック図である。硬さセンサ部41は、探触子7の先端に、振動子43と、振動検出センサ45とが設けられ、振動子43に接続される入力端子47と、振動検出センサ45に接続される出力端子49を備える。また、硬さ検出手段51は、硬さセンサ部41の出力端子49に入力端が接続される増幅器53と、増幅器53の出力端と硬さセンサ部41の入力端子47との間に設けられ、振動子43への入力波形と振動検出センサ45からの出力波形に位相差が生じるときは、周波数を変化させて前記位相差をゼロにシフトする位相シフト回路55とを備える。かかる機能を持つ位相シフト回路の内容については、特開平9−145691号公報に詳しく述べられている。
【0025】
このような構成で、硬さセンサ部41と生体組織を含む閉ループの共振状態を維持しつつ、生体組織の硬さが変化することで生ずる周波数変化を、周波数偏差検出部57で検出し、硬さ変換器59により硬さに変換する。このようにして検出される生体の硬さを用い、探触子7を押付け戻し駆動することで、そのヒステリシス特性を定量的に得ることができる。
【0026】
【発明の効果】
本発明に係る生体組織の弾力特性測定装置は、生体の管部に挿通し、管部内側の生体組織の弾力特性を定量的に測定できる。
【図面の簡単な説明】
【図1】 本発明に係る実施の形態の、弾力特性測定装置が、生体の管部に挿通されている状態を示した図である。
【図2】 本発明に係る実施の形態の、弾力特性測定装置において、探触子基部と、その外側に配置されたスリーブとが、軸方向に相対的に移動するときの、探触子の動きを説明する図である。
【図3】 本発明に係る実施の形態の、弾力特性測定装置において、探触子としてバルーンを探触子基部に取付けたものを示す図である。
【図4】 本発明に係る実施の形態の、弾力特性測定装置において、探触子の先端部分につき詳細に示した図である。
【図5】 本発明に係る実施の形態の、弾力特性測定装置を用い、所定の測定箇所において、探触子を押付け戻し駆動したときの、生体組織の応力Fと変位量Xの変化を、縦軸に応力F、横軸に変位量Xとして示した図である。
【図6】 本発明に係る実施の形態の、弾力特性測定装置を用いた、生体の管部の異なる三点における弾力特性の測定例を示す図である。
【図7】 本発明に係る他の実施の形態の、弾力特性測定装置における、硬さ検出の部分のブロック図である。
【符号の説明】
1 弾力特性測定装置、3 生体の管部、5 探触子基部、7 探触子、9 スリーブ、11 バルーン、13 ポンプ、15 板バネ、17 応力検出基台、19 接触ボール、21 応力検出センサ、23 変位量検出センサ、25 応力算出部、27 変位量算出部、29 弾性特性算出部、41 硬さセンサ部、43 振動子、45 振動検出センサ、47 入力端子、49 出力端子、51 硬さ検出手段、53 増幅器、55 位相シフト回路、57 周波数偏差検出部、59 硬さ変換器。
Claims (3)
- 生体の管部に挿通し、管部内側の組織の弾力特性を測定する生体組織の弾力特性測定装置であって、
探触子を保持し、生体の管部に挿通する探触子基部と、
探触子基部の外側に配置される管状のスリーブと、
探触子基部の外周にバネによって取付けられ、生体の管部内側の生体組織に近接配置され、生体組織に対し押付け戻し駆動される探触子と、
探触子に設けられ、押付け戻し駆動されるときの生体組織からの反力から、生体組織に与える応力を検出する応力検出センサと、
探触子基部に対する応力検出センサの変位量を検出する変位量検出センサと、
を備え、
探触子基部とスリーブとの間の相対運動によってバネが押付け戻されることによって、探触子の全体をスリーブの内部に収納し、また探触子をスリーブの内部から出して生体組織に押付け戻し、押付け戻されるときの応力−変位量特性から生体の弾力特性を測定することを特徴とする生体組織の弾力特性測定装置。 - 生体の管部に挿通し、管部内側の組織の弾力特性を測定する生体組織の弾力特性測定装置であって、
探触子を保持し、生体の管部に挿通する探触子基部と、
探触子基部の外側に配置される管状のスリーブと、
探触子基部の外周にバネによって取付けられ、生体の管部内側の生体組織に近接配置され、生体組織に対し押付け戻し駆動される探触子と、
探触子に設けられ、生体の硬さに関する信号を出す硬さセンサ部と、
硬さセンサ部からの信号に基づき生体の硬さを検出する硬さ検出手段と、
探触子基部に対する硬さセンサ部の変位量を検出する変位量検出センサと、
を備え、
探触子基部とスリーブとの間の相対運動によってバネが押付け戻されることによって、探触子の全体をスリーブの内部に収納し、また探触子をスリーブの内部から出して生体組織に押付け戻し、押付け戻されるときの硬さ特性から生体の弾力特性を測定することを特徴とする生体組織の弾力特性測定装置。 - 請求項2に記載の生体組織の弾力特性測定装置において、
前記硬さセンサ部は、
振動子と、振動検出センサとが設けられ、振動子に接続される入力端子と、振動検出センサに接続される出力端子を備え、
前記硬さ検出手段は、
前記硬さセンサ部の出力端子に入力端が接続される増幅器と、
増幅器の出力端と前記硬さセンサ部の入力端子との間に設けられ、前記振動子への入力波形と振動検出センサからの出力波形に位相差が生じるときは、周波数を変化させて前記位相差をゼロにシフトする位相シフト回路と、を備え、硬さセンサ部と生体組織を含む閉ループの共振状態を維持しつつ、生体組織の硬さが変化することで生ずる前記周波数変化から、生体組織の硬さを検出することを特徴とする生体組織の弾力特性測定装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002020178A JP4052504B2 (ja) | 2002-01-29 | 2002-01-29 | 生体組織の弾力特性測定装置 |
| US10/502,240 US7648470B2 (en) | 2002-01-29 | 2002-08-20 | Elasticity measuring device for biological tissue |
| PCT/JP2002/008389 WO2003063698A1 (en) | 2002-01-29 | 2002-08-20 | Elasticity measuring device for biological tissue |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002020178A JP4052504B2 (ja) | 2002-01-29 | 2002-01-29 | 生体組織の弾力特性測定装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003220038A JP2003220038A (ja) | 2003-08-05 |
| JP2003220038A5 JP2003220038A5 (ja) | 2005-08-04 |
| JP4052504B2 true JP4052504B2 (ja) | 2008-02-27 |
Family
ID=27654333
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002020178A Expired - Fee Related JP4052504B2 (ja) | 2002-01-29 | 2002-01-29 | 生体組織の弾力特性測定装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7648470B2 (ja) |
| JP (1) | JP4052504B2 (ja) |
| WO (1) | WO2003063698A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB0228276D0 (en) * | 2002-12-04 | 2003-01-08 | Univ Heriot Watt | Apparatus for mapping biological tissue quality |
| JP3966468B2 (ja) * | 2003-02-12 | 2007-08-29 | 学校法人日本大学 | 生体組織の弾力特性測定装置 |
| JP4922056B2 (ja) * | 2007-05-01 | 2012-04-25 | 伊藤超短波株式会社 | 筋組織硬度計 |
| BRPI0702130A2 (pt) * | 2007-06-26 | 2009-02-17 | Zanetti Miriam Raquel Diniz | medidor da elasticidade perineal |
| JP2009198302A (ja) * | 2008-02-21 | 2009-09-03 | Nagoya Institute Of Technology | 流体を用いた触覚センシング方法および流体を用いた触覚センサ |
| EP2229884A1 (en) * | 2009-03-18 | 2010-09-22 | Contipi Ltd. | Device and method for fitting a pessary |
| CN104689459B (zh) * | 2009-10-13 | 2018-05-04 | 玛特纳医疗公司 | 用于预防在分娩期间阴道撕裂的方法和装置 |
| US20130085413A1 (en) * | 2010-06-13 | 2013-04-04 | Oded Tsamir | Anatomical-positioning apparatus and method with an expandable device |
| NO333208B1 (no) * | 2011-04-05 | 2013-04-08 | Pelvital As | Apparat og system for testing og trening av bekkenbunnsmuskulatur |
| KR20140008728A (ko) * | 2012-07-11 | 2014-01-22 | 삼성전자주식회사 | 로봇을 이용한 촉진 장치 및 방법 |
| WO2014190034A1 (en) * | 2013-05-23 | 2014-11-27 | The General Hospital Corporation | System and method for measuring solid stress in tissues |
| US10674917B2 (en) * | 2015-04-24 | 2020-06-09 | Board Of Regents, The University Of Texas System | Device for the mechanical detection of underlying tissues |
| WO2017011389A1 (en) | 2015-07-10 | 2017-01-19 | Materna Medical, Inc. | Systems and methods for the treatment and prevention of female pelvic dysfunction |
| US10631838B2 (en) * | 2016-05-03 | 2020-04-28 | Covidien Lp | Devices, systems, and methods for locating pressure sensitive critical structures |
| CN111447976B (zh) * | 2017-12-13 | 2023-03-31 | 沛尔维他美国股份有限公司 | 用于组织再生的设备、系统及方法 |
| CN110393898B (zh) * | 2019-08-31 | 2021-05-11 | 厦门臻万智能科技有限公司 | 便携式盆底肌训练装置、盆底肌训练装置的压力校正方法及系统 |
| CN110538432B (zh) * | 2019-08-31 | 2021-08-27 | 厦门臻万智能科技有限公司 | 一种便携式盆底肌训练装置的训练方法及系统 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4132224A (en) * | 1977-01-12 | 1979-01-02 | Randolph Robert G | Durometer for indentible tissue and the like |
| US4250894A (en) * | 1978-11-14 | 1981-02-17 | Yeda Research & Development Co., Ltd. | Instrument for viscoelastic measurement |
| US4432376A (en) * | 1980-01-30 | 1984-02-21 | Huszar Gabor B | Method for determining the extensibility of selected non-excised tissue of the uterine cervix, ear or skin |
| FR2543834B1 (fr) * | 1983-04-07 | 1985-08-23 | Descartes Universite Rene | Sonde a geometrie variable pour la mesure des contraintes radiales dans un sphincter d'un organisme vivant |
| US5010892A (en) * | 1988-05-04 | 1991-04-30 | Triangle Research And Development Corp. | Body lumen measuring instrument |
| DE3832690C1 (ja) * | 1988-09-26 | 1990-04-12 | Courage + Khazaka Electronic Gmbh, 5000 Koeln, De | |
| US5860934A (en) * | 1992-12-21 | 1999-01-19 | Artann Corporation | Method and device for mechanical imaging of breast |
| US5396887A (en) * | 1993-09-23 | 1995-03-14 | Cardiac Pathways Corporation | Apparatus and method for detecting contact pressure |
| US5701913A (en) * | 1995-02-03 | 1997-12-30 | University Technologies International Inc. | Tissue softness probe |
| JP3054575B2 (ja) * | 1995-03-31 | 2000-06-19 | 三洋電機株式会社 | 空気調和機 |
| US5776081A (en) * | 1995-06-06 | 1998-07-07 | University Of Iowa Research Foundation | Urethral pressure catheter |
| JP3151153B2 (ja) * | 1995-09-20 | 2001-04-03 | 定夫 尾股 | 周波数偏差検出回路及びそれを利用した測定器 |
| US6215961B1 (en) * | 1996-01-29 | 2001-04-10 | Minolta Co., Ltd. | Camera |
| EP0920614B1 (en) * | 1996-08-23 | 2005-05-11 | Osteobiologics, Inc. | Handheld materials tester |
| JP3951257B2 (ja) * | 1996-11-08 | 2007-08-01 | 株式会社井元製作所 | 筋硬度計 |
| US6093158A (en) * | 1997-05-15 | 2000-07-25 | Morris; Donald E. | Systems for modifying behavioral disorders |
| US6351549B1 (en) * | 1997-10-24 | 2002-02-26 | Ultratouch Corporation | Detection head for an apparatus for detecting very small breast anomalies |
| US6461332B1 (en) * | 1998-10-19 | 2002-10-08 | Surx, Inc. | Urinary incontinence diagnostic system |
| IL126723A0 (en) * | 1998-10-22 | 1999-08-17 | Medoc Ltd | Vaginal probe and method |
| JP4365929B2 (ja) * | 1999-03-19 | 2009-11-18 | キヤノン株式会社 | 露出演算装置及び撮像装置 |
| US6063044A (en) * | 1999-04-20 | 2000-05-16 | Leonard; Charles T. | Apparatus for measuring muscle tone |
| US6595933B2 (en) * | 2000-03-31 | 2003-07-22 | Artann Laboratories | Self-palpation device for examination of breast with 3-D positioning system |
| US6752770B2 (en) * | 2000-11-15 | 2004-06-22 | The Research Foundation Of State University Of New York | System and method for analyzing a region below one or more layers of tissue |
| US20020077568A1 (en) * | 2000-11-22 | 2002-06-20 | Haddock Thomas F. | Biological vessel volume measurement method and apparatus utilizing micro accelerometer |
| US6569108B2 (en) * | 2001-03-28 | 2003-05-27 | Profile, Llc | Real time mechanical imaging of the prostate |
| JP4748405B2 (ja) * | 2001-04-18 | 2011-08-17 | 学校法人日本大学 | 物質硬さ測定装置 |
| DE60230743D1 (de) * | 2001-05-17 | 2009-02-26 | Oticon As | Verfahren und vorrichtung zum erhalt von einen kanal betreffenden geometrischen daten |
| US6659967B1 (en) * | 2001-10-19 | 2003-12-09 | Ncse, Llc | System and method for noninvasively evaluating a limb suspected of compartment syndrome |
-
2002
- 2002-01-29 JP JP2002020178A patent/JP4052504B2/ja not_active Expired - Fee Related
- 2002-08-20 WO PCT/JP2002/008389 patent/WO2003063698A1/en active Application Filing
- 2002-08-20 US US10/502,240 patent/US7648470B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| WO2003063698A1 (en) | 2003-08-07 |
| JP2003220038A (ja) | 2003-08-05 |
| US7648470B2 (en) | 2010-01-19 |
| US20050256387A1 (en) | 2005-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4052504B2 (ja) | 生体組織の弾力特性測定装置 | |
| US7615014B2 (en) | Device for measuring elastic properties of tissue | |
| US20050065408A1 (en) | Systems and methods for determining pressure and spacing relating to anatomical structures | |
| Peng et al. | Novel MEMS stiffness sensor for force and elasticity measurements | |
| CN103654743B (zh) | 一种脉象测试仪 | |
| EP1967826A3 (en) | capacitive displacement sensor | |
| CN110139625A (zh) | 用于确定对象的结构特性的系统和方法 | |
| WO2017179425A1 (ja) | 圧脈波検出装置及び生体情報測定装置 | |
| US20080097236A1 (en) | Apparatus for detecting tactile sensitivity | |
| Murayama et al. | Development of tactile mapping system for the stiffness characterization of tissue slice using novel tactile sensing technology | |
| JP4154720B2 (ja) | 粘弾性体表面の力学特性測定装置 | |
| JPH06313752A (ja) | 軟質材用硬度計 | |
| WO2018094737A1 (zh) | 脉搏波采集装置和脉搏波采集标定方法 | |
| CN107238452A (zh) | 多动能触觉传感器及测量方法 | |
| JP3654134B2 (ja) | Oリングテスト装置 | |
| US4768521A (en) | Pressure algometer apparatus | |
| US20200205955A1 (en) | Smart surgical spacer for tissue-implant interface | |
| JP4974128B2 (ja) | 張力測定装置 | |
| KR102042628B1 (ko) | 안압을 정량적으로 측정하도록 변형률을 증폭시킨 스마트 콘택트 렌즈 | |
| CN111855032A (zh) | 一种基于柔性铰链对称结构的压电触觉传感器 | |
| Maeda et al. | A tactile sensor with the reference plane for detection abilities of frictional force and human body hardness aimed to medical applications | |
| El-Bab et al. | Tactile sensor for compliance detection | |
| RU2082312C1 (ru) | Устройство для определения вязкоупругих свойств мягких тканей | |
| WO2006002313A1 (en) | Device and methods for assessment of body cavity pressures | |
| KR20190047959A (ko) | 경도 측정장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050112 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050112 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20050112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070320 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070515 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070612 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070821 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071022 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071113 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071129 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101214 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101214 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111214 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121214 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |