JP4051040B2 - 座標軸上を移動可能なスライドの三次元位置検出装置 - Google Patents
座標軸上を移動可能なスライドの三次元位置検出装置 Download PDFInfo
- Publication number
- JP4051040B2 JP4051040B2 JP2004083303A JP2004083303A JP4051040B2 JP 4051040 B2 JP4051040 B2 JP 4051040B2 JP 2004083303 A JP2004083303 A JP 2004083303A JP 2004083303 A JP2004083303 A JP 2004083303A JP 4051040 B2 JP4051040 B2 JP 4051040B2
- Authority
- JP
- Japan
- Prior art keywords
- read head
- support body
- slide
- linear scale
- dimensional
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/0002—Arrangements for supporting, fixing or guiding the measuring instrument or the object to be measured
- G01B5/0009—Guiding surfaces; Arrangements compensating for non-linearity there-of
Description
また本発明の他の装置は、第1および第2の面28、32が、基準24の側面28と、該側面に対して直角に折曲された端面32である。
さらに本発明の他の装置は、距離センサ40が読取りヘッドを基準にして支持本体22;23の規定された位置に設けられている。
さらにまた本発明の他の装置は、基準24が温度に対して不変な材質によって構成されている。
さらにまた本発明の他の装置は、支持本体22;23が温度に対して不変な材質によって構成されている。
さらにまた本発明の他の装置は、スライド14のガイド12を形成している2つの離間した長手ガイド12’、12’’の間に配置するために、基準24が形成されている。
さらにまた本発明の他の装置は、基準24が延長された矩形状プレートである。
さらにまた本発明の他の装置は、支持本体22が断面においてU字型であり、さらにその両方のU字型脚部22’、22’’で第1と第2、または第3の読取りヘッド34、36;38を支持している。
さらにまた本発明の他の装置は、支持本体23が折曲部であり、さらにその両方の折曲部脚部23’、23’’で第1と第2、または第3の読取りヘッド34、36;38を支持している。
さらにまた本発明の他の装置は、該読取りヘッドが基準24の長手延伸を基準にして、第1または第2の読取りヘッド34、36と同じ高さで該読取りヘッドと対向するように、第3の読取りヘッド38が支持本体22;23に設けられている。
本発明に係る装置の一の実施形態において、第1の面と第2の面が、基準の互いに対向する互いに平行な2つの側面である場合、基準は、断面において矩形状の延長されたスケール状物体とすることができる。これによって基準に基づいた支持本体およびこれと結合されたスライドの位置と三次元位置を、極めて簡単な方法で検出することができる。
本発明に係る装置の別の実施形態において、第1の面と第2の面が、基準の側面および、該側面に対して直角に折曲された端面である場合、支持本体は、本発明に係る装置の上記実施形態と同様に、リニアスケールが対向する互いに平行な2つの側面上に配置されているような用途においてよりも特定の用途においてより合理的であり得るような構成とできる。
本発明に係る装置の別の実施形態において、距離センサが、支持本体で読取りヘッドを基準にして規定された位置に設けられている場合、該距離センサは、座標軸に直角な方向においてリニアスケールを支持している面に対するその距離を決定できる。読取りヘッドおよび距離センサを正確に規定された位置で支持本体に配置することによって、支持本体の、およびこれと結合されたスライドの位置と三次元位置を再現できるように決定することができる。
本発明に係る装置の別の実施形態において、前記基準と支持本体が温度に対して不変な材質によって構成されている場合、位置測定システムの測定精度に及ぼす温度の影響を排除することができる。
本発明に係る装置の別の実施形態において、スライドのガイドを形成している2つの離間された長手ガイド間に配置するために基準が形成されている場合、該基準は、コラムの、およびそれによってコラムのガイドの寸法、あるいは位置の変化がここで適用された測定値記録方法に基づいて検出されるように、工作機械や測定機の座標軸に沿って配置されたホルダに取り付けることができる。本発明に係る装置の少なくともこの実施形態を適用するのに好適な既知の測定機としては、クリンゲルンベルク社の歯形計測センタP65/P100があり、該歯形計測センタは2002年カタログ番号1353/D/IOにおいて開示され説明されている。
本発明に係る装置の別の実施形態において、基準が、長く引き伸ばされた矩形状プレートである場合は、該プレートはこれがスライドの離間された長手ガイドの間で長手ガイドと同じ高さに、あるいは長手ガイドに対して手前にずらして配置できるような寸法とすることができる。
本発明に係る装置の別の実施形態において、支持本体はその断面がU字型である。その2つのU字型脚部で第1の読取りヘッドと第2の読取りヘッド、または第3の読取りヘッドを支持している場合、支持本体は、特に次のようにスライドに固定するのに適している。すなわち、これらの読取りヘッドが基準の対向する互いに平行な2つの面上で二次元リニアスケールを検出することができる。
本発明に係る装置の別の実施形態において、支持本体は折曲部であり、さらにその両方の脚部で第1の読取りヘッドと第2の読取りヘッド、または第3の読取りヘッドを支持している場合は、位置測定システムは、特にリニアスケールを検出するのに適しており、該リニアスケールは、2つの互いに直角に折曲された面上で基準を支持している。
本発明に係る装置の別の実施形態において、第3の読取りヘッドが基準の縦方向延伸をもとにして該読取りヘッドと同じ高さで第1の読取りヘッド、あるいは第2の読取りヘッドと対向するように第3の読取りヘッドが支持本体に設けられている場合、両方の読取りヘッドは、その位置を座標軸の方向において、およびこれに直角な方向において基準のそれぞれ対向して取り付けられた十字格子構造物に対して相対的に検出することができる。これら3つの読取りヘッドは共同で、座標軸を中心にして、および該座標軸に対して直角な別の2つの座標軸を中心にして支持本体の傾倒を検出することができる。
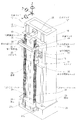
12…ガイド
12’、12”…長手ガイド
14…スライド
16…Zコラム
19…折曲部材
20…位置測定システム
21…位置測定システム
22…支持本体
22’、22”…U字型脚部
23…支持本体
23’、23”…折曲部脚部
24…基準
25…折曲部材
26…ベースプレート
27a、27b…折曲片
28…側面
29…二次元リニアスケール
30…側面
31…二次元リニアスケール
32…端面
34…第1の読取りヘッド
36…第2の読取りヘッド
38…第3の読取りヘッド
40…距離センサ
Claims (9)
- スライド(14)のガイドに対して平行に延伸しており、角柱状基準(24)に基づいて一の座標軸内でガイドに沿って移動可能なスライド(14)の三次元位置を検出するための工作機械または測定機向け装置において、
前記スライド(14)と固定結合可能な、あるいはスライドに組み込まれた支持本体(22;23)の三次元位置を決定するために位置測定システム(20)が設けられており、
前記基準(24)の第1および第2の面(28、30;28、32)は、各々二次元リニアスケール(29、31)を支持しており、
前記基準(24)のリニアスケール(29、31)を検出するための位置測定システム(20)は、
第1の読取りヘッド(34)と、これと離間している第2の読取りヘッド(36)であって、前記読取りヘッドは共に、前記支持本体(22;23)に設けられており、かつ二次元リニアスケール(29;31)のうちの第1のリニアスケール(29)に対応する第1の読取りヘッド(34)および第2の読取りヘッド(36)と、
前記支持本体(22;23)に設けられた第3の読取りヘッド(38)であって、前記読取りヘッドは二次元リニアスケール(29、31)のうちの第2のリニアスケール(31)に対応する第3の読取りヘッド(38)と、
前記支持本体(22;23)と、一の二次元リニアスケール(29、31)を備えた面(28、30;28、32)の1つ(28)またはこれに平行な何れかの面との間の距離を検出するための距離センサ(40)と、
を有しており、
前記スライド(14)での支持本体(22;23)の配置は、該支持本体(22;23)が検出過程の際に前記基準(24)と接触し得ないように行われることを特徴とする装置。 - 前記第1および第2の面(28、30)は、前記基準(24)の対向する互いに平行な2つの側面(28、30)であることを特徴とする請求項1記載の装置。
- 前記第1および第2の面(28、32)は、前記基準(24)の側面(28)と、該側面に対して直角に折曲された端面(32)であることを特徴とする請求項1記載の装置。
- 前記距離センサ(40)は、読取りヘッドを基準にして支持本体(22;23)の規定された位置に設けられていることを特徴とする請求項1から請求項3のいずれかに記載の装置。
- 前記基準(24)は、スライド(14)のガイド(12)を形成している2つの離間した長手ガイド(12'、12'')の間に配置されていることを特徴とする請求項1から請求項4のいずれかに記載の装置。
- 前記基準(24)は、延長された矩形状プレートであることを特徴とする請求項1から請求項5のいずれかに記載の装置。
- 前記支持本体(22)は、断面においてU字型であり、さらにその両方のU字型脚部(22'、22'')で第1と第2、または第3の読取りヘッド(34、36;38)を支持していることを特徴とする請求項2に記載の装置。
- 前記支持本体(23)は、折曲部であり、さらにその両方の折曲部脚部(23'、23'')で第1と第2、または第3の読取りヘッド(34、36;38)を支持していることを特徴とする請求項3に記載の装置。
- 前記第3の読取りヘッド(38)は、該読取りヘッドが前記基準(24)の長手延伸を基準にして、第1または第2の読取りヘッド(34、36)と同じ高さで該読取りヘッドと対向するように支持本体(22;23)に設けられていることを特徴とする請求項2に記載の装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10313036A DE10313036B3 (de) | 2003-03-24 | 2003-03-24 | Vorrichtung zum Erfassen der räumlichen Lage eines in einer Koordinatenachse verfahrbaren Schlittens |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004286750A JP2004286750A (ja) | 2004-10-14 |
| JP4051040B2 true JP4051040B2 (ja) | 2008-02-20 |
Family
ID=32731154
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004083303A Expired - Fee Related JP4051040B2 (ja) | 2003-03-24 | 2004-03-22 | 座標軸上を移動可能なスライドの三次元位置検出装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7127824B2 (ja) |
| EP (1) | EP1462757B1 (ja) |
| JP (1) | JP4051040B2 (ja) |
| CN (1) | CN100549614C (ja) |
| AT (1) | ATE453097T1 (ja) |
| DE (2) | DE10313036B3 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10313038B4 (de) * | 2003-03-24 | 2005-02-17 | Klingelnberg Gmbh | Vorrichtung zur Erfassung der Lage eines Tastelements in einem Mehrkoordinatenmessgerät |
| GB0411837D0 (en) * | 2004-05-27 | 2004-06-30 | Leuven K U Res & Dev | A measurement configuration based on linear scales able to measure to a target also moving perpendicular to the measurement axis |
| CN2765139Y (zh) * | 2004-12-27 | 2006-03-15 | 杨忠义 | 双柱式数显高度规 |
| EP1852674B1 (de) * | 2006-05-05 | 2015-09-09 | Dr. Johannes Heidenhain GmbH | Messvorrichtung zur Bestimmung des relativen Versatzes zwischen zwei Bauteilen |
| EP2037227B1 (de) * | 2007-09-12 | 2015-11-04 | Pepperl + Fuchs GmbH | Verfahren und Vorrichtung zum Bestimmen der Position eines Fahrzeugs, Computerprogramm und Computerprogrammprodukt |
| US8511380B2 (en) * | 2007-10-10 | 2013-08-20 | Schlumberger Technology Corporation | Multi-zone gravel pack system with pipe coupling and integrated valve |
| EP2138806A1 (de) * | 2008-06-27 | 2009-12-30 | SICK STEGMANN GmbH | Positionsmessvorrichtung |
| JP6479309B2 (ja) * | 2012-08-20 | 2019-03-06 | Dmg森精機株式会社 | スケール装置、位置情報生成方法及び多軸ステージ装置 |
| DE102013102475B4 (de) * | 2013-03-12 | 2015-12-31 | Carl Mahr Holding Gmbh | Führungsvorrichtung |
| CN104716070B (zh) * | 2015-04-03 | 2017-12-26 | 合肥京东方光电科技有限公司 | 尺寸检测装置及基板装载装置 |
| KR101920121B1 (ko) | 2016-11-18 | 2018-11-19 | 한국항공우주연구원 | 길이 안정성 측정 장치 |
| CN106595817A (zh) * | 2016-12-07 | 2017-04-26 | 深圳华夏恒泰电子有限公司 | 尿素液位传感器测试系统 |
| CN108286941A (zh) * | 2017-01-09 | 2018-07-17 | 台湾动力检测科技股份有限公司 | 长度量测装置 |
| CN108489354B (zh) * | 2018-03-19 | 2024-04-12 | 南京星乔威泰克汽车零部件有限公司 | 一种位置度检测装置 |
| CN110207568A (zh) * | 2019-06-28 | 2019-09-06 | 庆铃汽车(集团)有限公司 | 用于检测连杆侧面及盖座面的位置精度的检测装置及方法 |
| CN112461170A (zh) * | 2019-09-09 | 2021-03-09 | 廊坊精雕数控机床制造有限公司 | 一种机床几何精度的数字化检测方法及装置 |
| DE102021200417B3 (de) * | 2021-01-18 | 2022-04-28 | Dr. Johannes Heidenhain Gmbh | Längenmesseinrichtung |
| CN113701643B (zh) * | 2021-08-27 | 2024-02-02 | 大连船用柴油机有限公司 | 非平行面尺寸精确测量和圆周角度孔定位的测量方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4166323A (en) * | 1973-09-14 | 1979-09-04 | Maag Gear-Wheel & Machine Co. Ltd. | Gear tester for profile and lead testing |
| GB2034880B (en) * | 1978-11-11 | 1983-03-09 | Ferranti Ltd | Twodimensional measuring apparatus |
| DE3150977A1 (de) * | 1981-12-23 | 1983-06-30 | Fa. Carl Zeiss, 7920 Heidenheim | Verfahren und einrichtung zur ermittlung und korrektur von fuehrungsfehlern |
| DE3526919A1 (de) * | 1985-07-25 | 1986-01-02 | Ulrich Dipl.-Ing. 4950 Minden Griebel | Messeinrichtung zur bestimmung der positioniergenauigkeit von frei programmierbaren handhabungsgeraeten |
| DE216041T1 (de) * | 1985-08-01 | 1987-10-15 | Brown & Sharpe Mfg. Co., 02852 North Kingston, Ri., Us | Verfahren und vorrichtung zum dreidimensionalen messen eines objektes. |
| DE3717459A1 (de) * | 1987-05-23 | 1988-12-01 | Zeiss Carl Fa | Handgefuehrtes koordinatenmessgeraet |
| DE3834676A1 (de) * | 1988-10-12 | 1990-04-19 | Heidenhain Gmbh Dr Johannes | Photoelektrische positionsmesseinrichtung |
| DE4040794A1 (de) * | 1990-12-17 | 1992-06-25 | Ems Technik Gmbh | Verfahren und lagegeber zur lagebestimmung eines positionierkoerpers relativ zu einem bezugskoerper |
| DE4308456C2 (de) * | 1993-03-17 | 1996-03-28 | Ems Technik Gmbh | Vorrichtung zur Lagebestimmung eines Positionierkörpers relativ zu einem Bezugskörper |
| DE4345094C2 (de) * | 1993-12-31 | 1995-12-14 | Perthen Feinpruef Gmbh | Formmeßmaschine |
| DE19501178C2 (de) * | 1995-01-17 | 1996-05-02 | Klingelnberg Soehne | Schwenkbarer Zwei-Koordinaten-Tastkopf mit horizontaler Hauptachse |
| KR0141161B1 (ko) * | 1995-03-20 | 1998-07-01 | 이대원 | 회전 테이블을 구비한 스테이지 장치 및 스테이지 장치의 구동 방법 |
| US6351313B1 (en) * | 1997-09-29 | 2002-02-26 | Dr. Johannes Heidenhain Gmbh | Device for detecting the position of two bodies |
| EP1019669B1 (de) * | 1997-09-29 | 2002-07-24 | Dr. Johannes Heidenhain GmbH | Vorrichtung zur erfassung der position von zwei körpern |
| US6543149B1 (en) * | 1999-12-02 | 2003-04-08 | The Regents Of The University Of California | Coordinate measuring system |
| US6389702B1 (en) * | 2000-05-12 | 2002-05-21 | Electroglas, Inc. | Method and apparatus for motion control |
| JP4444469B2 (ja) * | 2000-08-07 | 2010-03-31 | 株式会社ミツトヨ | 光学式変位測定装置 |
| US6949733B2 (en) * | 2003-03-10 | 2005-09-27 | Asm Technology Singapore Pte Ltd | Determination of a movable gantry position including a dual measurement module |
| DE10313038B4 (de) * | 2003-03-24 | 2005-02-17 | Klingelnberg Gmbh | Vorrichtung zur Erfassung der Lage eines Tastelements in einem Mehrkoordinatenmessgerät |
-
2003
- 2003-03-24 DE DE10313036A patent/DE10313036B3/de not_active Expired - Fee Related
-
2004
- 2004-03-02 AT AT04004879T patent/ATE453097T1/de active
- 2004-03-02 EP EP04004879A patent/EP1462757B1/de not_active Expired - Lifetime
- 2004-03-02 DE DE502004010535T patent/DE502004010535D1/de not_active Expired - Fee Related
- 2004-03-17 US US10/802,208 patent/US7127824B2/en active Active
- 2004-03-22 JP JP2004083303A patent/JP4051040B2/ja not_active Expired - Fee Related
- 2004-03-24 CN CNB2004100317130A patent/CN100549614C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE10313036B3 (de) | 2004-08-19 |
| EP1462757A1 (de) | 2004-09-29 |
| US7127824B2 (en) | 2006-10-31 |
| US20040246499A1 (en) | 2004-12-09 |
| ATE453097T1 (de) | 2010-01-15 |
| EP1462757B1 (de) | 2009-12-23 |
| CN100549614C (zh) | 2009-10-14 |
| JP2004286750A (ja) | 2004-10-14 |
| CN1532515A (zh) | 2004-09-29 |
| DE502004010535D1 (de) | 2010-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4203439B2 (ja) | 多座標測定機におけるプローブ要素の位置を検出するプローブ位置検出装置 | |
| JP4051040B2 (ja) | 座標軸上を移動可能なスライドの三次元位置検出装置 | |
| EP2449341B1 (en) | Coordinate measuring machine (cmm) and method of compensating errors in a cmm | |
| CN102997843A (zh) | 用于位置确定设备的表面检测装置 | |
| JP2000258153A (ja) | 平面平坦度測定装置 | |
| TWI248850B (en) | Determination of a movable gantry position | |
| US7869970B2 (en) | Probe straightness measuring method | |
| JP2001518606A (ja) | 2つの対象物の位置を検出するための装置 | |
| JP5158791B2 (ja) | 測定装置 | |
| CN107525457B (zh) | 工业机械 | |
| US20190277615A1 (en) | Measurement apparatus | |
| JP4494189B2 (ja) | 非接触画像測定機の精度測定方法及び校正方法 | |
| JP6052953B2 (ja) | 三次元測定機、てこ式プローブの位置情報および姿勢情報を取得する方法 | |
| EP2754992A1 (en) | Optical profilometer | |
| JP2005181023A (ja) | 平面間の高低差と傾斜角度の測定装置及び方法 | |
| JP2586633Y2 (ja) | 平面度測定機 | |
| JP2020159795A (ja) | 三次元座標測定装置 | |
| KR20220027747A (ko) | 위치 측정 장치 | |
| JP2022047558A (ja) | 寸法測定器 | |
| KR20230122236A (ko) | 2개 이상의 프로브를 사용하는 3차원 측정기 | |
| JPH09113254A (ja) | 中心位置検出方法及びその装置 | |
| JP2010169634A (ja) | 作業装置 | |
| JP2018072201A (ja) | 形状測定方法及び形状測定装置 | |
| JPH02253112A (ja) | 形状測定装置 | |
| JPH05231830A (ja) | 水平距離測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070605 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20070904 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20070907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071113 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071130 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4051040 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101207 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101207 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111207 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111207 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121207 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121207 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131207 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |