JP3972064B2 - センサ装置及び安全装置 - Google Patents
センサ装置及び安全装置 Download PDFInfo
- Publication number
- JP3972064B2 JP3972064B2 JP2000087631A JP2000087631A JP3972064B2 JP 3972064 B2 JP3972064 B2 JP 3972064B2 JP 2000087631 A JP2000087631 A JP 2000087631A JP 2000087631 A JP2000087631 A JP 2000087631A JP 3972064 B2 JP3972064 B2 JP 3972064B2
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- capacitance
- plates
- human body
- detection circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images













Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/12—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine
- F16P3/14—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact
- F16P3/148—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact using capacitive technology
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/945—Proximity switches
- H03K17/955—Proximity switches using a capacitive detector
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K2217/00—Indexing scheme related to electronic switching or gating, i.e. not by contact-making or -breaking covered by H03K17/00
- H03K2217/94—Indexing scheme related to electronic switching or gating, i.e. not by contact-making or -breaking covered by H03K17/00 characterised by the way in which the control signal is generated
- H03K2217/96—Touch switches
- H03K2217/9607—Capacitive touch switches
- H03K2217/960735—Capacitive touch switches characterised by circuit details
- H03K2217/96075—Capacitive touch switches characterised by circuit details involving bridge circuit
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Geophysics And Detection Of Objects (AREA)
- Emergency Alarm Devices (AREA)
- Measurement Of Resistance Or Impedance (AREA)
Description
【発明の属する技術分野】
本発明は、所定の領域内に人体等の一部または全体が入ったことを検知するセンサ装置及び安全装置に関するものである。
【0002】
【従来の技術】
工作機械や加工装置、検査装置、搬送装置等の駆動機構を有する装置においては、駆動部が外部に露出しているものや、外部から容易に駆動部に接近することができるものがある。例えば、プラスチックチップから検査用の薄い試料片を作るための圧延装置では、一対の圧延ローラー間にチップを手で投げ入れる構成となっており、そのため、圧延ローラー間にチップを投げ入れる際に手が圧延ローラーに触れるおそれがある。
【0003】
そこで、通常この種の機械装置には、作業員の安全を確保するために安全装置が設けられており、人体の一部が駆動部に近付いたことをセンサ装置により検知し、駆動部を停止するなどの措置を採っている。
安全装置のセンサ装置としては、例えば特開昭63−216692号公報や特開平1−317987号公報に記載のものが挙げられる。これらの公報に記載されているセンサ装置は、対向して配設された一対の電極板から構成された静電容量型センサである。
【0004】
そして、これらの電極板間の静電容量の変化を検出することで、電極板間を人体の一部が横切ったか否かを検知するものである。
この静電容量型センサは、人体が空気に比して相当に高い誘電率を有しているため、電極板間に人体の一部が置かれた場合に静電容量が大きく変化するという原理に基づいて構成されたものである。
【0005】
【発明が解決しようとする課題】
上述の静電容量型センサを用いた安全装置は、作業員の安全を確保するために欠くべからざるものである。しかし、断線、電極の破損や脱落、電源断等の故障が起こったり、あるいは電磁環境の変化や異常な温度上昇等の周辺環境の影響によりセンサが誤作動して、安全装置が正常に動作しない場合には、不測の事故を防止するために駆動部を停止させるなどの適切な措置をとる必要がある。しかも、このような故障や誤作動はいつ発生するか予測できないので、常時監視する必要がある。
【0006】
従って、本発明は、センサが正常に動作しているか否かを常時監視し、安全性をより向上させたセンサ装置及び安全装置を提供することを目的とする。
【0007】
【課題を解決するための手段】
上記課題を解決するための本発明のセンサ装置は、接地された機器と所定の間隙をおいて配置された少なくとも1つの電極板と、この電極板の一部に対向して配置された補助電極と、前記間隙内に特定の誘電体が存在するか否かを電極板と機器との間の静電容量変化により検知する静電容量検出回路と、前記補助電極を定期的に前記静電容量検出回路側に接続して誘電体検知の正常性の有無を監視する監視手段とを備えている。
【0008】
本発明の安全装置は、接地された機器の所定の領域に人体の少なくとも一部が入ったことを検知して安全手段を作動させるものであって、前記接地された機器と前記領域をはさんで配置された電極板と、この電極板の一部に対向して配置された補助電極と、前記領域内に人体の少なくとも一部が存在するか否かを電極板と機器との間の静電容量変化により検知する静電容量検出回路と、前記補助電極を定期的に前記静電容量検出回路側に接続して人体検知の正常性の有無を監視する監視手段とを備えている。
【0009】
このように、本発明では、補助電極を用いて人体等の誘電体検知が正常に作動しているか否かを常時監視しているので、故障が生じても直ちに機器の停止等の措置をとることができ、安全性がより一層向上する。特に、本発明は、静電容量の変化によってセンサの正常性を監視する方式であるので、電磁環境変化や温度等の周辺環境の影響によりセンサが誤作動した場合にも、当該誤作動を静電容量の変化により直ちに認識し、必要な措置をとることができる。
また、本発明では、前記電極板の裏面側に配置されたガード板と、このガード板の裏面側に配置されて接地されたシールド板とを備えているのが好ましい。これにより、電極板の裏面側には電磁界が形成されないため、検知領域は電極板の間隙側の領域に限られることになり、その結果、誤検知が無くなり、安全装置においては必要領域においてのみ確実に作動させることができる。
【0010】
本発明の他のセンサ装置は、所定の間隙をおいて互いに対向して配置された一対の電極板と、これらの電極板のいずれか一方の電極板の一部に対向して配置された補助電極と、前記間隙内に特定の誘電体が存在するか否かを電極板間の静電容量変化により検知する静電容量検出回路と、前記補助電極を定期的に前記静電容量検出回路側に接続して誘電体検知の正常性の有無を監視する監視手段とを備えている。
【0011】
また、本発明の他の安全装置は、所定の領域に人体の少なくとも一部が入ったことを検知して安全手段を作動させるものであって、前記領域をはさんで互いに対向して配置された一対の電極板と、これらの電極板のいずれか一方の電極板の一部に対向配置された補助電極と、前記領域内に人体の少なくとも一部が存在するか否かを電極板間の静電容量変化により検知する静電容量検出回路と、前記補助電極を定期的に前記静電容量検出回路側に接続して人体検知の正常性の有無を監視する監視手段とを備えている。
【0012】
これらのセンサ装置及び安全装置においても、前記と同様に、補助電極により人体の検知の正常性の有無を定期的に監視しているので、故障の有無を直ちに認識することができ、より安全性を向上させることができる。
前記一対の電極板の非対向面側にはそれぞれ、接地されたシールド板を対向して配置させるのが望ましい。これにより、電極板のシールド板の存在により電極板の裏面側には電磁界が形成されなくなって、誤検知が無くなる。
【0013】
【発明の実施の形態】
以下、本発明の実施の形態を図面を参照して説明する。以下の説明で同じ参照符号は同じまたは均等の要素を指すものとする。以下、圧延機への適用と関連して説明するが、これは単なる例に過ぎず、限定されない。なお、本発明の静電容量型センサのセンサ装置には、対地間型、電極間型と電極・対地間型の3種類があるので、先ずこれらの対地間型、電極間型と電極・対地間型のセンサ装置について説明する。また、これらのセンサ装置における制御動作の理解を容易にするために、センサ装置が正常に動作しているか否かの監視手段については後述し、この監視手段を省いたセンサ装置の制御動作について説明する。
【0014】
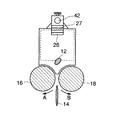
図1及び図2は、本発明が適用される圧延装置10を示している。この圧延装置10は、合成ゴム等のプラスチック材料のチップ12を圧延して検査用の試料片14を製造するためのものであり、一対の圧延ローラー16、18を備えている。
圧延ローラー16、18は、図2の矢印A、Bで示すように、駆動系20により互いに相反する方向に回転駆動される。したがって、圧延ローラー16、18間にチップ12を投入すると、チップ12は圧延ローラー16、18間で押し潰され、試料片14となって下方に落下する。
【0015】
ここで、図2に示すように、チップ12の投入は人手によるため、手を圧延ローラー16、18に過度に近づけることは好ましくない。このため、この圧延装置10には、本発明によるセンサ装置22を用いた安全装置24が設けられている。
【0016】
このセンサ装置22は、所定の間隔をおいて圧延ローラー16、18に対して平行に配設された1枚の電極板26を備えている。この1枚の電極板26は、圧延ローラー16、18の上方の位置に配置されている。電極板26と圧延ローラー16、18間の空間は、人体の一部が存在するか否かを検知するための検知領域となるものであり、したがって、図示の実施形態では、圧延ローラー16、18間の真上のほぼ全ての領域が検知領域となっている。
【0017】
また、電極板26の裏面側、すなわち検知領域とは反対の面の側にはガード板27及びシールド板28が配置されている。このガード板27とシールド板28は、比較的小さな間隙をもって電極板26に対して平行に配置されている。
また、ガード板27とシールド板28は、ステンレス鋼、銅、アルミニウム等の良導体からなり、電極板26の全面を完全に覆うことができる寸法形状としている。
【0018】
電極板26、ガード板27及びシールド板28は、圧延装置10のフレーム34に取り付けられた支持具42によって支持されている。すなわち、支持具42にシールド板28が直接固定され、シールド板28に絶縁材からなるスペーサ31を介してガード板27が絶縁材からなるボルト等により固定されている。また、電極板26は絶縁材からなるスペーサ33を介してガード板27に絶縁材からなるボルト等により固定されている。言うまでもなく、圧延ロ−ラ−16、18は接地されている
【0019】
このようにして構成することにより、電極板26と接地された圧延ローラー16、18との間で静電容量結合を生じ、この電極板26と圧延ローラー16、18との間に人体の一部が入ることにより、この静電容量が変化することになる。
【0020】
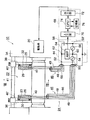
このように構成されたセンサ装置22は、電極板26と圧延ローラー16、18間に人体の一部が入ったことを静電容量の変化として検知するため、静電容量検出回路44にその検知信号としての容量変化が入力されるようになっている。すなわち、電極板26は二重同軸ケーブル46の中心導体48により静電容量検出回路44の入力端子50に接続されている。さらに、ガード板27は二重同軸ケーブル46の内側シールド線49により静電容量検出回路44の入力端子51に接続され、シールド板28は、二重同軸ケーブル46の外側シールド線66により静電容量検出回路44の入力端子52に接続されている。
【0021】
静電容量検出回路44は、いわゆるインピーダンスブリッジを用いたものであり、ブリッジの4辺のうち2辺に測定用電源54、56が介装されている。また、ブリッジの1辺は電極板26と圧延ローラー16、18とで形成されるキャパシタとなっており、残る1辺には平衡キャパシタ58が介装されている。
上記測定用電源54、56間の端子60と、平衡キャパシタ58の一端側が接続され、接地されている端子62との間に、出力アンプ64が設けてある。また、シールド板28は二重同軸ケーブル46の外側シールド線66を介して接地されている。
【0022】
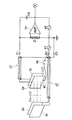
図3に示す回路は、図1に示す静電容量検出回路44を、電極板26と圧延ローラー16、18により形成されるキャパシタやその他の部分でのキャパシタを含めた形で示した等価回路である。
ここで、図3において、符号C0は、電極板26と圧延ローラー16、18により形成される静電容量を示し、C1は、ガード板27及び内側シールド線49とシールド板28及び外側シールド線66により形成される静電容量である。また、CBは、平衡キャパシタ58の静電容量を示すものである。さらに、Ze1、Ze2はそれぞれ測定用電源54、56の内部インピーダンスを示し、Ziは出力アンプ64の内部インピーダンスを示している。
【0023】
ここで、図3に示す回路の動作について説明する。電極板26と圧延ローラー16、18間に空気のみが存在している状態で測定用電源54、56を投入すると、電源54から容量C1を通って流れる電流は、電源54の電圧e1が、Ze1i1よりも十分に大きい場合、インピーダンスZiに流れる。
このとき、1/(ωC0)がZiよりも十分に大きい場合、電流i1のほとんどがインピーダンスZiに流れる。電源56から、電圧e1と同一電圧e2で容量CBを通って流れる電流i2は、電流i1に等しく位相差が180°とした場合、インピーダンスZiの電流はゼロとなる。
今、電極板26と圧延ローラー16、18間に、接地された誘電体(例えば、作業員の手)が入り込むと、誘電体の比誘電率に応じた容量C0が増加する。この増加分を△Cとすると、電流i1はe1ω△Cだけ増加し、インピーダンスZiに電流が流れ、信号として出力される。また、誘電体が接地されておらず、いわゆるフローティングの状態でも容量C0が増加し、インピーダンスZiに同様に電流が流れて信号として出力され、人体の検知を行なうことができる。
【0024】
このように、図3に示す回路では、電極板26とガード板27、シールド板28との間で構成されるキャパシタや二重同軸ケーブル46のキャパシタ、その他の外乱の影響を受け難く、電極板26と圧延ローラー16、18間の静電容量の変化を正確に検出することができるものである。
【0025】
また、静電容量検出回路44の出力アンプ64から出力される信号は制御装置68に入力されており、この制御装置68は、入力された信号に応じて制御信号を圧延装置10の駆動系20に出力し、圧延装置10の緊急停止を適時行なうように構成されている。
図1に示すように制御装置68は、入力部70、出力部72、CPUからなる中央演算処理部74及びRAMやROMからなる記憶部76で構成されている。静電容量検出回路44から入力部70に入力された信号は、デジタル信号に変換されて中央演算処理部74に送られる。
【0026】
中央演算処理部74では、入力信号から電極板26と圧延ローラー16、18間の静電容量の変化量△Cを認識する。誘電体としての人体の一部が電極板26と圧延ローラー16、18間に入った際の静電容量変化量の最低値Cminは、予め記憶部76にデータとして格納されており、中央演算処理部74では、このデータCminと入力信号から認識した静電容量変化量△Cとを比較する。そして、△CがCminを越えていると判断した場合、電極板26と圧延ローラー16、18間に人体が存在していると検知し、緊急停止のための制御信号を出力部72から圧延装置10の駆動系20に出力するようになっている。
【0027】
このように、プラスチックチップ12を圧延ローラー16、18間に投げ入れる際に、手が電極板26と圧延ローラー16、18間の外側に位置している場合には、電極板26と圧延ローラー16、18間の静電容量は大きく変化せず、よって圧延装置10は駆動を続ける。もちろん、チップ12が電極板26と圧延ローラー16、18間を横切った際にも静電容量の変化は生じるが、その変化量は微小であり、制御装置68の記憶部76に記憶した最低値Cminを越えることはない。
そして、手が電極板26と圧延ローラー16、18間に挿入されると、静電容量の変化が生じ、安全装置24は圧延装置10を緊急停止するように動作することになる。この際、手の挿入量が極めて小さい場合には、記憶部76の最低値Cminを適宜設定しておくことで、危険状態でないと判断することもできる。また、手を挿入した後、すぐに引っ込めた場合も、静電容量の変化時間を考慮することで、緊急停止信号を発しないようにすることもできる。
【0028】
また、対地間型のセンサ装置22において、ガード板27と接地されたシールド板28が電極板26の裏面側に離隔配置されているため、電極板26の裏面側から圧延ローラー16、18以外の方向に延びる電気力線は形成されない。したがって、危険領域ではない電極板26の裏面側に手やその他の人体の一部が位置していたとしても、電極板26と圧延ローラー16、18間の静電容量に変化は生じず、圧延装置10が不要な停止状態になることはない。
【0029】
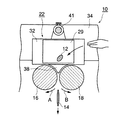
次に、電極間型のセンサ装置22の構成について図4〜図6により説明する。図4、図5に見られるようにこの電極間型のセンサ装置22は、所定の間隔をおいて互いに平行に対向配置された一対の電極板26、29を備えている。一方の電極板26は、圧延装置10の一側であって圧延ローラー16、18間の真上の位置に配置され、他方の電極板29は、圧延装置10の他側であって圧延ローラー16、18間の真上の位置に配置されている。
これらの電極板26、29間の空間は、人体の一部が存在するか否かを検知するための検知領域となるものであり、よって、図示の実施形態では、圧延ローラー16、18間の真上のほぼ全ての領域が検知領域となっている。
【0030】
また、各電極板26、29の裏面側、すなわち、検知領域とは反対の面の側にはシールド板30、32が配置されている。このシールド板30、32は、比較的小さな間隙をもって、対応の電極板26、29に対して平行に対向して配置されている。
また、シールド板30、32は、ステンレス鋼、銅、アルミニウム等の良導体からなり、電極板26、29の全面を完全に覆うことができる寸法形状としている。
【0031】
各側の電極板26、29及びシールド板30、32は、圧延装置10のフレーム34に設けられた支持板36、38によって支持されている。すなわち、支持板36、38にシールド板30、32が直接固定され、電極板26、29は絶縁材からなるスペーサ40を介してシールド板30、32に絶縁材からなるボルト等により固定されている。
なお、図示の支持板36、38は、装置フレーム34に設けられた支持シャフト41に摺動可能に取り付けられており、その位置を任意に調整できるようになっている。
【0032】
このように構成されたセンサ装置22は、電極板26、29間に人体の一部が入ったことを静電容量の変化として検知するため、対地間型の場合と同様な静電容量検出回路44に接続されている。なお、静電容量検出回路44及び制御装置68の構成は基本的には対地間型の場合と同様であるが、電極間型の場合、対地間型と比較して細かい部分で異なるところがあるので、電極間型のセンサ装置22についても詳細に説明する。なお、同一の機能を発揮する要素には、同一の番号を付している。
【0033】
すなわち、各電極板26、29は、同軸ケーブル47の中心導体48を介して静電容量検出回路44の入力端子50、52に接続されている。静電容量検出回路44は、いわゆるインピーダンスブリッジを用いたものであり、ブリッジの4辺のうち2辺に測定用電源54、56が介装されている。
また、ブリッジの1辺は電極板26、29により構成されるキャパシタとなっており、残る1辺には平衡キャパシタ58が介装されている。測定用電源54、56間の接地されている端子60と、入力端子52側の端子62との間に出力アンプ64が設けてある。また、各シールド板30、32は同軸ケーブル47の外側シールド線66を介して接地されている。
【0034】
図6に示す回路は、図4に示す静電容量検出回路44を、電極板26、29により構成されるキャパシタやその他の部分でのキャパシタを含めた形で示した等価回路である。図6において、C0は、電極板26、29により規定される静電容量を示し、C1、C2はそれぞれ各側の電極板26、29とシールド板30、32との間、及び同軸ケーブル47により規定される静電容量である。
さらに、CB は平衡キャパシタ58の静電容量を示し、さらに、Ze1、Ze2はそれぞれ測定用電源54、56の内部インピーダンスを示し、Ziは出力アンプ64の内部インピーダンスを示している。
【0035】
ここで、図6に示す回路の動作について説明する。電極板26、29間に空気のみが存在している状態で、測定用電源54、56を投入すると、電源54から容量C2を通って流れる電流は、電源54の電圧e1がZe1i1よりも十分に大きい場合、インピーダンスZiにはほとんど流れず、無視できる。
また、容量C0を通って流れる電流は容量C1とインピーダンスZiに分かれる。このとき、1/(ωC1)がZiよりも十分に大きい場合、電流i1の殆どがインピーダンスZiに流れる。電源56から電圧e1と同一電圧e2で容量CBを通って流れる電流i2は、電流i1に等しく位相差が180°とした場合、インピーダンスZiの電流はゼロとなる。
【0036】
今、電極板26、29間に接地された誘電体が入り込むと、容量C1とC2の一部となり、誘電体の比誘電率に応じた量だけ容量C0が減少する。この減少分を△Cとすると、電流i1はe1ω△Cだけ減少し、インピーダンスZiに電流が流れ、信号として出力される。
また、誘電体が接地されておらず、いわゆるフローティングの状態では、容量C0が増加し、インピーダンスZiに逆方向に電流が流れる。
【0037】
このように、図6に示す電極間型の回路では、電極板26、29とシールド板30、32との間で構成されるキャパシタや同軸ケーブル47のキャパシタ、その他の外乱の影響を受け難く、電極板26、29間の静電容量の変化を正確に検出することができるものである。
【0038】
なお、静電容量検出回路44からの検知信号を受けて緊急停止信号を出力する制御装置68の構成は、図1に示す対地間型の場合と同様である。
制御装置68の中央演算処理部74では、入力信号から電極板26、29間の静電容量の変化量△Cを認識する。誘電体として人体の一部が電極板26、29間に入った際の静電容量変化量の最低値Cminは、予め記憶部76にデータとして記憶されている、中央演算処理部74では、このデータCminと入力信号から認識した静電容量変化量△Cとを比較し、△CがCminを越えていると判断した場合、電極板26、29間に人体が存在するとして検知し、緊急停止のための制御信号を出力部72から圧延装置10の駆動系20に出力するようになっている。
【0039】
このように電極間型のセンサ装置22を備えた安全装置24においても、プラスチックチップ12を圧延ローラー16、18間に投げ入れる際に、手が電極板26、29間の外側に位置している場合には、電極板26、29間の静電容量は大きく変化せず、よって圧延装置10は駆動を続ける。
もちろん、チップ12が電極板26、29を横切った際にも容量変化は生じるが、その変化量は微小であり、制御装置68の記憶部76に記憶した最低値Cminを越えることはない。
【0040】
そして、手が電極板26、29間に挿入されると、静電容量の変化が生じ、安全装置24は圧延装置10を緊急停止するように動作することとなる。この際、手の挿入量が極めて小さい場合には、記憶部76の最低値Cminを適宜設定しておくことで、危険状態でないと判断するようにすることもできる。また、手を挿入した後、すぐに引っ込めた場合でも、静電容量の変化時間を考慮することで、緊急停止信号を発しないようにすることもできる。
【0041】
なお、電極間型のセンサ装置22においても、接地されたシールド板30、32が各電極板26、29の裏面側に離隔配置されているため、一方の電極板26の裏面から他方の電極板29に裏面側に延びる電気力線は形成されない。したがって、危険領域ではない電極板26、29の裏面側に手やその他の人体の一部が位置していたとしても、電極板26、29間の静電容量に変化は生じず、圧延装置10が不要な停止状態となることはない。
【0042】
図7及び図8は本発明の第3の実施形態として適用される接地/電極間型センサを備えた圧延装置10を示している。この圧延装置10は、合成ゴム等のプラスチック材料のチップ12を圧延して検査用の試料片14を作るためのものであり、一対の圧延ローラー16、18を有している。圧延ローラー16、18は、図8の矢印A,Bで示すように、駆動系20により互いに相反する方向に回転される。したがって、圧延ローラー16、18間にチップ12を投入すると、チップ12は圧延ローラー16、18間で押し潰され、試料片14となって下方に落下する。
【0043】
図8から理解されるように、チップ12の投入は人手によるため、手を圧延ローラー16、18に過渡に近づけることは好ましくない。このため、この圧延装置10には、本発明によるセンサ装置22を用いた安全装置24を設けている。
【0044】
図示のセンサ装置22は、所望の間隙をおいて互いに平行に対向配置された一対の電極板26、29を備えている。一方の電極板26は、圧延装置10の一側であって圧延ローラー16、18間の真上位置に配置され、他方の電極板29は、圧延装置10の他側であって圧延ローラー16、18間の真上位置に配置されている。これらの電極板26、29間の空間は、人体の一部が存在するか否かを検知するための検知領域となるものであり、よって、図示の実施形態では、圧延ローラー16、18間の真上のほぼ全ての領域が検知領域となっている。
【0045】
各電極板26、29の裏面側、すなわち、検知領域とは反対の面の側にはガード板23、25と接地されたシールド板30、32が配置されている。ガード板23、25とシールド板30、32は、比較的小さな間隙をもって、対応の電極板26、29に対して平行に対向配置されている。また、ガード板23、25とシールド板30、32はステンレス綱、銅、アルミニウム等の良導体から成り、電極板26、29の全面を完全に覆うことができる寸法形状を有している。
【0046】
各側の電極板26、29及びガード板23、25、シールド板30、32は、圧延装置10のフレーム34に設けられた支持板36、38によって支持されている。より詳細には、支持板36、38にシールド板30、32が直接固定され、シールド板30、32に絶縁性のスペーサ40’を介してガード板23、25が絶縁性のボルト等により固定され、電極板26、29はスペーサ40を介してガード板23、25に絶縁性のボルト等により固定されている。なお、図示の支持板36、38は、装置フレーム34に設けられた支持シャフト41に摺動可能に取り付けられており、その位置を調整できるようになっている。
【0047】
このように構成されたセンサ装置22は、電極板26、29間に人体の一部が入ったことを静電容量の変化として検知するため、静電容量検出回路44に接続されている。すなわち、各電極板26、29は、二重同軸ケーブル46の中心導体48により静電容量検出回路44の入力端子50、52に接続されている。静電容量検出回路44は、いわゆるインピーダンスブリッジを用いたもので、4辺ブリッジのうち2辺に測定用電源54、56が接続されている。また、4辺ブリッジの1辺は電極板26、29により構成されるキャパシタとなっており、残る1辺には平衡キャパシタ58が設けられている。測定用電源54、56間の端子60と電極板26、29間のキャパシタと平衡キャパシタ58間の端子62との間には出力アンプ64があり、測定用電源56の端子50’は接地されている。また、各ガード板23、25と各シールド板30、32は二重同軸ケーブル46の内側シールド線49と外側シールド線66を介して接地されている。
【0048】
図9の回路は、図7に示す静電容量検出回路44を、電極板26、29により構成されるキャパシタやその他の部分でのキャパシタを含めた形で示した等価回路である。この図において、符号C0は、電極板26、29により規定される静電容量を示し、符号C1、C2はそれぞれ、各電極板26、29と圧延ローラー16、18により規定される静電容量を示し、C7はガード板23、25との間、及び二重同軸ケーブル46により規定される静電容量、更に符号CB は平衡キャパシタ58の静電容量を示すものである。また、符号Ze1,Ze2はそれぞれ測定用電源54、56の内部インピーダンスであり、符号Ziは、出力アンプ64の内部インピーダンスである。
【0049】
ここで、図9のみ示す回路の動作について説明する。電極板29とシールド板32間にガード板25を、電極板26とシールド板30間にガード板23を配置した時に生ずる静電容量をそれぞれC5、C6とし、ブリッジの平衡を得易くするため、電極板26、29間にC3を、電極板29とシールド板30間にCB をそれぞれ付加する。電極板26、29間に空気のみが存在している状態で、電源e1,e2を投入すると、電源e1からC0、C3の合成容量C03とインピーダンスZiを流れる電流をi1とした時、電源e2からインピーダンスZiとC2,CBの合成容量C2Bを流れる電流i2がi1に等しく、位相差が180度の場合にインピーダンスZiの電流はゼロとなる。いま、電極板26、29間に誘電体が入り込むと、誘電体の比誘電率に応じた量だけ容量C0が減少する。この減少分を△Cとすると、電流i1は、e1ω△Cだけ減少し、インピーダンスZiに電流が流れ、信号として出力される。
【0050】
このように、図7及び図9に示す回路では、電極板26、29とガード板23、25、シールド板30、32との間で構成されるキャパシタや二重同軸ケーブル46のキャパシタ、その他の外乱の影響を受け難く、電極板26、29間の静電容量の変化を正確に検出することが可能である。
【0051】
静電容量検出回路44の出力アンプ64から出力される信号は制御装置68に入力される。この制御装置68は、入力された信号に応じて制御信号を圧延装置10の駆動系20に発し、圧延装置10の緊急停止を適時行なうよう構成されている。
【0052】
より詳細に述べるならば、制御装置68は、入力部70、出力部72、中央演算処理部(CPU)74及び記憶部76から構成されている。静電容量検出回路44から入力部70に入力された信号はデジタル信号に変換されて中央演算処理部74に送られる。中央演算処理部74では、入力信号から電極板26、29間に静電容量の変化量△Cを認識する。誘電体として人体の一部が電極板26、29間に入った際の静電容量変化量の最低値Cminは予め記憶部76にデータとして記憶されており、中央演算処理部74ではこのデータCminと入力信号から認識した静電容量変化量△Cとを比較する。そして、△CがCminを超えていると判断した場合、電極板26、29間に人体が有ると検知し、緊急停止のための制御信号を出力部72から圧延装置10の駆動系20に発するようになっている。
【0053】
以上から安全装置24の動作については理解されるであろうが、簡単に述べるならば、プラスチックチップ12を圧延ローラー16、18間に投げ入れる際、手が電極板26、29間の外側に位置している場合には、電極板26、29間の静電容量は大きく変化せず、よって圧延装置10は駆動を続ける。勿論、チップ12が電極板26、29間を横切った際にも容量変化は生じるが、その変化量は微少であり、制御装置68の記憶部76に記憶した最低値Cminを超えることはない。そして、手が電極板26、29間に挿入されると、静電容量の変化が生じ、安全装置24は圧延装置10を緊急停止するように動作することとなる。この際、手の挿入量が極めて小さい場合には、記憶部76の最低値Cminを適宜設定しておくことで、危険状態でないと判断することもできる。また、手を挿入した後、すぐに引っ込めた場合も、静電容量の変化時間を考慮することで、緊急停止信号を発しないようにすることもできる。
【0054】
更に、本発明の構成では、ガード板23、25と接地されるシールド板30、32が各電極板26、29の裏面側に離隔配置されているため、一方の電極板26の裏面側から他方の電極板29の裏面側に延びる電気力線は形成されない。したがって、危険領域ではない電極板26、29の裏面側に手やその他の人体の一部が位置していたとしても、電極板26、29間の静電容量に変化は生じず、圧延装置10が不要な停止状態となることはない。
【0055】
なお、上記の実施の形態(対地間型、電極間型と、電極・対地間型ともに)では、安全装置24の制御装置68からの信号により圧延装置10の駆動を停止するようにしているが、警報のみを発し、あるいは、警報と共に駆動を停止して安全を図るようにしても良い。もちろん、その他の安全手段を動作させることも可能である。
【0056】
以上が対地間型、電極間型と電極・対地間型のセンサ装置22が人体を検出する場合の動作説明であり、このセンサ装置22に該センサ装置22が常時正常に動作しているか否かを監視する手段を備えた構成について説明する。
【0057】
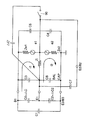
次に本発明の第1の実施形態による対地間型のセンサ装置22の監視手段について説明する。図10及び図11に示すように、対地間型のセンサ装置22の電極板26に近接して小さな面積の補助電極80を該電極板26に対して平行に対向配設し、この補助電極80を接地することで、容量を増加させて人体を検知したのと同様の出力を行なうものである。電極板26側の補助電極80の一面には絶縁材82を配設して、補助電極80が電極板26に短絡するのを防止するようにしている。
【0058】
制御装置68の中央演算処理部74と出力部72との間には、制御部84が設けられる。この制御部84は、同期回路86とスイッチング回路88とで構成されている。そして、スイッチング回路88の中のスイッチング素子90(図10参照)をオンオフすることで補助電極80を接地したり、フローティング状態としている。
上記スイッチング素子90は、例えば、1秒間の間にミリセコンドオーダーでオンし、そのオン後はオフとし、これを常時繰り返すようにしている。したがって、1秒毎に補助電極80を強制的に接地させて、センサ装置22が正常に動作しているか否かを監視するものである。
【0059】
具体的な回路構成としては、補助電極80の一端にスイッチング素子90が接続され、このスイッチング回路88のスイッチング素子90を介して図11に示すように、同軸ケーブル92の中心導体94が接続され、この中心導体94の端末が静電容量検出回路44内で接地されている。
また、絶縁材82は同軸ケーブル92の外部導体であるシールド線96に接続され、静電容量検出回路44内で接地されている。
【0060】
また、制御部84の同期回路86が中央演算処理部74と出力部72との間に設けられ、スイッチング素子90がオンの時には、それに同期して中央演算処理部74からの検知信号が出力部72に出力されるのを防止して、監視時での駆動系20が緊急停止となるのを防止している。
【0061】
図12はかかる場合の等価回路を示し、図3の等価回路に対して、補助電極80によるフローティング状態の容量△C’とスイッチング素子90との直列回路が、容量C0に並列に接続された状態となっている。
スイッチング素子90が中央演算処理部74によりオン駆動されると、補助電極80が接地され、この接地による補助電極80と電極板26との間の容量△Cが容量C0に並列に接続されることになり、C0に対して△C分が増加する。これにより、この静電容量の増加により人体を検知したのと同様の静電容量の変化量となり、人体を検知したのと同じ検知信号を出力する。
【0062】
なお、図12において、スイッチング素子90がオフの時の補助電極80と電極板26との間の容量△C’は、人体を検知する場合の最低値Cmin以下であり、この場合は、人体が存在しないのと同等の信号が生成されるようになっている。
また、スイッチング素子90がオンして容量C0に△C分が増加することで、人体を検知したのと同等の検知信号を出力するようになっている。
【0063】
スイッチング素子90がオンして検知信号を出力する場合には、この信号を受けてセンサ装置22が正常である旨の表示を行なうことで、作業員は容易に視認することができる。また、センサ装置22が正常でない場合には、その旨の表示や報知の手段により周りの作業員に知らせることができる。これにより、センサ装置22の正常性の有無を常時監視することができ、センサ装置22が正常に動作していることを容易に確認することができる。
【0064】
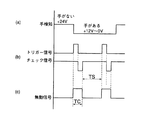
図19は上記制御動作のタイミングチャートを示し、図19(a)は図10に示す出力アンプ64の出力電圧を示している。手などの人体の一部を検知しない場合は、例えば+24Vが出力され、手を検知した場合には、安全情報(例えば0V〜+12V)の電圧が出力される。
そして、図19(b)に示すように、トリガー信号を中央演算処理部74が出力し、その後チェック信号によりスイッチング回路88のスイッチング素子90をオンせしめ、補助電極80を接地する。その後、スイッチング素子90をオフとして、通常のセンシング状態に移行する。
【0065】
トリガー信号の前縁からチェック信号の終わりまでの期間(TC)は、図19(c)に示すように、無動信号が出力され、監視期間での出力部72への検知信号の出力を遮断して、駆動系20が不用意に緊急停止制御されるのを防止している。
ここで、図19に示す監視期間TCを例えば、30mSとし、また、通常のセンシング期間TSを例えば、1秒としている。しかし、これらの時間は任意に設定できるものであり、適宜変更できることは言うまでもない。
【0066】
次に、本発明の第2の実施形態による電極間型のセンサ装置22の場合の監視手段について説明する。図13及び図14に示すように、一方の電極板(この実施形態では電極板29)に近接して、対地間型の場合と同様に、小さな面積の補助電極80を平行に対向配設している。
この補助電極80に同軸ケーブル92の中心導体94の一端側を接続し、中心導体94の他端側はスイッチング回路88のスイッチング素子90を介して測定用電源54側の入力端子50に接続してある。また、電極板29との短絡防止用の絶縁材82は同軸ケーブル92のシールド線96と接続され、静電容量検出回路44内で接地されている。
【0067】
図15はかかる場合の等価回路を示し、電極間型の等価回路を示す図6の容量C0に、フローティング状態の補助電極80の容量△C’とスイッチング素子90との直列回路を並列に接続した回路である。
スイッチング素子90をオンすることで、補助電極80と電極板29との間の容量△CがC0に並列に接続され、C0に対して△C分だけ容量が増加する。この△Cの増加により人体を検知したのと同等の検知信号を出力する。また、スイッチング素子90がオフの場合は、容量C0の状態のままであり、人体を検知していないのと同等の信号を出力することになる。
【0068】
なお、この電極間型のセンサ装置22においても対地間型の場合と同様に、図19に示す監視期間TCの間は無動信号により中央演算処理部74は出力部72に検知信号を出力しないようにして緊急停止制御を行なわないようにしてある。この電極間型のセンサ装置22においても、静電容量の変化から人体の少なくとも一部が存在するか否かを検知するセンサの正常性の有無を常に定期的に監視することができる。
【0069】
次に、電極・対地間型のセンサ装置22の場合の監視手段について説明する。図16及び図17に示すように、電極板29に近接して小さな面積の補助電極80を該電極板29に対して平行に対向配設し、この補助電極80をガード板23、25と接続し、容量を増加させて人体を検知したのと同様の出力を行なうものである。電極板29側の補助電極80の一面には絶縁材82を配設して、補助電極80が電極板29に短絡するのを防止するようにしている。
【0070】
制御装置68の中央演算処理部74と出力部72との間には、制御部84が設けられており、この制御部84は同期回路86とスイッチング回路88とで構成されている。そして、スイッチング回路88の中のスイッチング素子90(図16参照)をオンオフすることで補助電極80をガード板23、25と接続したり、フローティング状態としている。
上記スイッチング素子90は、例えば、1秒間の間にミリセコンドオーダーでオンし、そのオン後はオフとし、これを常時繰り返すようにしている。したがって、1秒毎に補助電極80を強制的にガード板23、25に接続して、センサ装置22が正常に動作しているか否かを監視するものである。
【0071】
具体的な回路構成としては、補助電極80に同軸ケーブル92の中心導体94の一端側を接続し、中心導体94の他端側はスイッチング回路88のスイッチング素子90を介して静電容量検出回路44内で接地されている。
また、絶縁材82は同軸ケーブル92の外部導体であるシールド線96に接続され、静電容量検出回路44内で接地されている。
【0072】
また、制御部84の同期回路86が中央演算処理部74と出力部72との間に設けられ、スイッチング素子90がオンの時には、それに同期して中央演算処理部74からの検知信号が出力部72に出力されるのを防止して、監視時での駆動系20が緊急停止用となるのを防止している。
【0073】
図18はかかる場合の等価回路を示し、図9の等価回路に対して、補助電極80によるフローティング状態の容量△C’とスイッチング素子90との直列回路が容量C7に並列に接続された状態となっている。
スイッチング素子90が中央演算処理部74によりオフの時、補助電極80がフローティング状態となり、これによる補助電極80とガード板25との間の容量△C’が容量C7に並列に接続されなくなり、C0に対して△C分及びC2に対して△C2分が増加する。これにより、この静電容量の増加により人体を検知したのと同様の静電容量の変化量となり、人体を検知したのと同じ検知信号を出力する。
【0074】
なお、図18において、スイッチング素子90がオン駆動されると、補助電極80とガード板25との間の容量△C’は、容量C7に並列に接続されるため、この場合は、人体が存在しないのと同等の信号が生成されるようになっている。
【0075】
スイッチング素子90がオフして検知信号を出力する場合には、この信号を受けてセンサ装置22が正常である旨の表示を行なうことで、作業員は容易に視認することができる。また、センサ装置22が正常でない場合には、その旨の表示や報知の手段により周りの作業員に知らせることができる。これにより、センサ装置22の正常性の有無を常時確認することができ、センサ装置22が正常に動作していることを容易に視認することができる。
【0076】
図19は上記制御動作のタイミングチャートを示し、図19(a)は図16に示す出力アンプ64の出力電圧を示している。手などの人体の一部を検知しない場合は、例えば+24が出力され、手を検知した場合には、安全情報(例えば、0V〜+12V)の電圧が出力される。
そして、図19(b)に示すように、トリガー信号を中央演算処理部74が出力し、その後チェック信号によりスイッチング回路88のスイッチング素子90をオフせしめ、補助電極80をフローティング状態とする。その後、スイッチング素子90をオンとして、通常のセンシング状態に移行する。
【0077】
トリガー信号からチェック信号の終わりまでの期間(TC)は、図19(c)に示すように、無動信号が出力され、監視期間での出力部72への検知信号の出力を遮断して、駆動系20が不用意に緊急停止制御されるのを防止している。
ここで、図19に示す監視期間TCを例えば、30mSとし、また、通常のセンシング期間TSを例えば、1秒としている。しかし、これらの期間は任意に設定できるものであり、適宜変更できることは言うまでもない。
【0078】
ところで、図10及び図13に示す出力アンプ64からの電圧信号の処理として、図19に示すように、手などの人体を検知した場合には安全情報(例えば0〜12V)の電圧が出力されるので、この可変する電圧の範囲に対応させて、例えば、ウインドウコンパレーターを用いて信号処理を行なうのが好適例である。
これにより可変する出力電圧に対しても正確に人体の検知を行なうことができ、また低コスト化をも図ることができる。
もちろん、出力アンプ64の信号出力の処理手段としては、ウインドウコンパレーターの他に、ANDゲート、自己保持回路、オンディレー、整流回路、アナログアンプ、出力アンプなどの、故障時に出力がオフとなる制御用のフェールセールICを用いたり、また強制ガイド式安全リレーを用いるようにしても良い。
【0079】
また、対地間型、電極間型及び電極・対地間型のセンサ装置22において、補助電極80を設けてセンサの正常性の有無を定期的に常時監視していることで、回路自体の故障、断線、電極の壊れと脱落、電源断といったセンサ自体の故障の有無を容易に検出できるものである。
また、静電容量型であるので、センサ装置22の周囲の電磁波、異常な温度などの周辺環境の影響による誤作動の有無も検知することができる。すなわち、いわゆるフェールセーフ回路を有したセンサ装置は、該装置の故障だけを監視しているが、本発明では、センサ装置22の故障と周辺環境の影響によるセンサの誤動作も監視することができる。
なお、監視によりセンサ装置22の異常を検知した場合には、制御装置68により駆動系20を停止するようにしている。
【0080】
本発明を適用できる装置は、圧延装置に限らず、駆動部等の危険領域に人体が近付くことが可能な装置ならばほとんど全てに適用が可能である。例えば、対地間型のセンサ装置22の場合は、押出機から吐出された樹脂等の板やフィルムを3本のローラーで圧延するようなシート圧延装置や、押出機から吐出された樹脂等のフィルムを引き取り、フィルムカッターでフィルムの耳をカットするようなシート引取装置や、また、金属、樹脂、木材等を回転帯鋸で切断する帯鋸装置や、更には、混練ローラーの上部へ手に掴んだゴム片等を投げ込むローラー混練機等に適用することができる。
【0081】
また、電極間型のセンサ装置22の場合は、押出機から吐出された樹脂等の板やフィルムを引き取るシート取引装置や、粉体、ペレット等を攪拌翼の回転で移送する重量フィーダーや、異種の樹脂、ゴム等をミキサーで練り、下部ダンパーより排出するバンバリミキサーや、ロボット等の可動式機械で、防護柵がある場合でも、部品、材料供給・加工品搬出及び機械の点検修理のために防護柵の一部が開くような可動式機械にも適用することができる。
【0082】
したがって、本明細書の特許請求の範囲で用いられた術語「機器」は、上述のように人体の一部の接近が危険な領域を有する種々な装置、機械、設備、機器等を包摂するように解釈されるべきである。
また、適用装置の検知領域に応じて、対地間型及び電極間型におけるセンサ装置22において、電極板と圧延ローラー、ガード板及びシールド板等の各部材の形状、寸法等は適宜変更し得ることは言うまでもない。
【0083】
【発明の効果】
本発明によれば、電極板の一部に対向配置した補助電極を定期的に静電容量検出回路に接続して、静電容量の変化からセンサの正常性の有無を常に監視しているので、作業員の安全を確保する安全装置において、より安全性を向上させることができるという効果がある。
また、本発明では、センサ装置の故障だけでなく、周辺の電磁波や温度などの影響によるセンサ装置の誤動作も監視することができる。
【0084】
また、本発明においては、電極板の裏面側にシールド板を配置することで、電極板の裏面側には電界が形成されず、そのため、電極板と機器との間や、電極板間の領域のみで人体の一部の有無を判断でき、誤検知を大幅に低減することができる。
【0085】
【図面の簡単な説明】
【図1】対地間型における補助電極を設けていない場合の機構部分とブロック回路図である。
【図2】図1のII−II線断面図である。
【図3】対地間型における補助電極を設けていない場合のセンサ装置と静電容量検出回路の等価回路を示す図である。
【図4】電極間型における補助電極を設けていない場合の機構部分とブロック回路図である。
【図5】図4のV−V線断面図である。
【図6】電極間型における補助電極を設けていない場合のセンサ装置と静電容量検出回路の等価回路を示す図である。
【図7】電極・対地間型における補助電極を設けていない場合の機構部分とブロック回路図である。
【図8】図7のVIII −VIII 線断面図である。
【図9】電極・対地間型における補助電極を設けていない場合のセンサ装置と静電容量検出回路の等価回路を示す図である。
【図10】本発明の一実施形態である対地間型のセンサ装置と静電容量検出回路との構成図である。
【図11】本発明の一実施形態である対地間型の機構部分とブロック回路図である。
【図12】対地間型の等価回路を示す図である。
【図13】本発明の他の実施形態である電極間型のセンサ装置と静電容量検出回路との構成図である。
【図14】本発明の他の実施形態である電極間型の機構部分とブロック回路図である。
【図15】電極間型の等価回路を示す図である。
【図16】本発明の他の実施形態である電極・対地間型のセンサ装置と静電容量検出回路との構成図である。
【図17】本発明の他の実施形態である電極・対地間型の機構部分とブロック回路図である。
【図18】電極・対地間型の等価回路を示す図である。
【図19】本発明の実施形態のタイミングチャートを示す図である。
【符号の説明】
22 センサ装置
26 電極板
27 ガード板
28 シールド板
29 電極板
30 シールド板
32 シールド板
44 静電容量検出回路
80 補助電極
Claims (6)
- 接地された機器と所定の間隙をおいて配置された少なくとも1つの電極板と、この電極板の一部に対向して配置された補助電極と、前記間隙内に特定の誘電体が存在するか否かを電極板と機器との間の静電容量変化により検知する静電容量検出回路と、前記補助電極を定期的に前記静電容量検出回路側に接続して誘電体検知の正常性の有無を監視する監視手段とを備えた前記接地された機器のためのセンサ装置。
- 前記電極板の裏面側に配置されたガード板と、このガード板の裏面側に配置されて接地されたシールド板とを備えた請求項1記載のセンサ装置。
- 接地された機器の所定の領域に人体の少なくとも一部が入ったことを検知して安全手段を作動させる安全装置において、前記接地された機器と前記領域をはさんで配置された電極板と、この電極板の一部に対向して配置された補助電極と、前記領域内に人体の少なくとも一部が存在するか否かを電極板と機器との間の静電容量変化により検知する静電容量検出回路と、前記補助電極を定期的に前記静電容量検出回路側に接続して人体検知の正常性の有無を監視する監視手段とを備えた安全装置。
- 所定の間隙をおいて互いに対向して配置された一対の電極板と、これらの電極板のいずれか一方の電極板の一部に対向して配置された補助電極と、前記間隙内に特定の誘電体が存在するか否かを電極板間の静電容量変化により検知する静電容量検出回路と、前記補助電極を定期的に前記静電容量検出回路側に接続して誘電体検知の正常性の有無を監視する監視手段とを備えたセンサ装置。
- 前記一対の電極板の非対向面側にそれぞれ、接地されたシールド板を対向して配置した請求項4記載のセンサ装置。
- 所定の領域に人体の少なくとも一部が入ったことを検知して安全手段を作動させる安全装置において、前記領域をはさんで互いに対向して配置された一対の電極板と、これらの電極板のいずれか一方の電極板の一部に対向して配置された補助電極と、前記領域内に人体の少なくとも一部が存在するか否かを電極板間の静電容量変化により検知する静電容量検出回路と、前記補助電極を定期的に前記静電容量検出回路側に接続して人体検知の正常性の有無を監視する監視手段とを備えていることを特徴とする安全装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000087631A JP3972064B2 (ja) | 1999-04-02 | 2000-03-27 | センサ装置及び安全装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP11-96550 | 1999-04-02 | ||
| JP9655099 | 1999-04-02 | ||
| JP2000087631A JP3972064B2 (ja) | 1999-04-02 | 2000-03-27 | センサ装置及び安全装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000346288A JP2000346288A (ja) | 2000-12-15 |
| JP3972064B2 true JP3972064B2 (ja) | 2007-09-05 |
Family
ID=14168202
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000087631A Expired - Lifetime JP3972064B2 (ja) | 1999-04-02 | 2000-03-27 | センサ装置及び安全装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6376939B1 (ja) |
| EP (1) | EP1041336A3 (ja) |
| JP (1) | JP3972064B2 (ja) |
| KR (1) | KR100655672B1 (ja) |
| SG (1) | SG77281A1 (ja) |
Families Citing this family (80)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7225712B2 (en) | 2000-08-14 | 2007-06-05 | Sd3, Llc | Motion detecting system for use in a safety system for power equipment |
| US7836804B2 (en) | 2003-08-20 | 2010-11-23 | Sd3, Llc | Woodworking machines with overmolded arbors |
| US8065943B2 (en) | 2000-09-18 | 2011-11-29 | Sd3, Llc | Translation stop for use in power equipment |
| US7712403B2 (en) | 2001-07-03 | 2010-05-11 | Sd3, Llc | Actuators for use in fast-acting safety systems |
| US8061245B2 (en) | 2000-09-29 | 2011-11-22 | Sd3, Llc | Safety methods for use in power equipment |
| US7077039B2 (en) | 2001-11-13 | 2006-07-18 | Sd3, Llc | Detection system for power equipment |
| US7707920B2 (en) | 2003-12-31 | 2010-05-04 | Sd3, Llc | Table saws with safety systems |
| US7827890B2 (en) | 2004-01-29 | 2010-11-09 | Sd3, Llc | Table saws with safety systems and systems to mount and index attachments |
| US7284467B2 (en) | 2000-08-14 | 2007-10-23 | Sd3, Llc | Apparatus and method for detecting dangerous conditions in power equipment |
| US7098800B2 (en) * | 2003-03-05 | 2006-08-29 | Sd3, Llc | Retraction system and motor position for use with safety systems for power equipment |
| US7210383B2 (en) | 2000-08-14 | 2007-05-01 | Sd3, Llc | Detection system for power equipment |
| US7024975B2 (en) | 2000-08-14 | 2006-04-11 | Sd3, Llc | Brake mechanism for power equipment |
| US20030056853A1 (en) | 2001-09-21 | 2003-03-27 | Gass Stephen F. | Router with improved safety system |
| US7197969B2 (en) * | 2001-09-24 | 2007-04-03 | Sd3, Llc | Logic control with test mode for fast-acting safety system |
| US20020017179A1 (en) * | 2000-08-14 | 2002-02-14 | Gass Stephen F. | Miter saw with improved safety system |
| US6857345B2 (en) | 2000-08-14 | 2005-02-22 | Sd3, Llc | Brake positioning system |
| US9724840B2 (en) | 1999-10-01 | 2017-08-08 | Sd3, Llc | Safety systems for power equipment |
| US8459157B2 (en) | 2003-12-31 | 2013-06-11 | Sd3, Llc | Brake cartridges and mounting systems for brake cartridges |
| US7640835B2 (en) * | 2000-08-14 | 2010-01-05 | Sd3, Llc | Apparatus and method for detecting dangerous conditions in power equipment |
| US7536238B2 (en) | 2003-12-31 | 2009-05-19 | Sd3, Llc | Detection systems for power equipment |
| US7377199B2 (en) * | 2000-09-29 | 2008-05-27 | Sd3, Llc | Contact detection system for power equipment |
| US7600455B2 (en) * | 2000-08-14 | 2009-10-13 | Sd3, Llc | Logic control for fast-acting safety system |
| US9927796B2 (en) | 2001-05-17 | 2018-03-27 | Sawstop Holding Llc | Band saw with improved safety system |
| US7350444B2 (en) * | 2000-08-14 | 2008-04-01 | Sd3, Llc | Table saw with improved safety system |
| EP1210771B1 (en) * | 2000-04-12 | 2008-06-11 | Manfreda, Andrej | Compact non-contact electrical switch |
| GB0018914D0 (en) * | 2000-08-03 | 2000-09-20 | Rees John C | Electronic safety control |
| EP1205331B1 (en) | 2000-11-14 | 2005-09-07 | Nissan Motor Company, Limited | Driving force control apparatus |
| CA2448479C (en) * | 2002-11-12 | 2009-05-05 | Makita Corporation | Power tools |
| US20040194594A1 (en) * | 2003-01-31 | 2004-10-07 | Dils Jeffrey M. | Machine safety protection system |
| US20060101960A1 (en) * | 2003-03-10 | 2006-05-18 | Smith Matthew A | Optical proximity device for power tools |
| US6922153B2 (en) | 2003-05-13 | 2005-07-26 | Credo Technology Corporation | Safety detection and protection system for power tools |
| US7769520B2 (en) * | 2003-10-27 | 2010-08-03 | Ford Global Technologies, Llc | Tractive force map |
| US7631822B2 (en) | 2004-09-10 | 2009-12-15 | Fellowes Inc. | Shredder with thickness detector |
| US7661614B2 (en) | 2004-09-10 | 2010-02-16 | Fellowes Inc. | Shredder throat safety system |
| US8870106B2 (en) | 2004-09-10 | 2014-10-28 | Fellowes, Inc. | Shredder with thickness detector |
| US7311276B2 (en) | 2004-09-10 | 2007-12-25 | Fellowes Inc. | Shredder with proximity sensing system |
| US7954737B2 (en) | 2007-10-04 | 2011-06-07 | Fellowes, Inc. | Shredder thickness with anti-jitter feature |
| JP4556584B2 (ja) * | 2004-09-16 | 2010-10-06 | 株式会社島津製作所 | 医用診断装置 |
| CN100556623C (zh) * | 2004-10-19 | 2009-11-04 | 松下电器产业株式会社 | 自动机械装置 |
| US20060141804A1 (en) * | 2004-12-28 | 2006-06-29 | Goodman Cathryn E | Method and apparatus to facilitate electrostatic discharge resiliency |
| US8672247B2 (en) | 2005-07-11 | 2014-03-18 | Fellowes, Inc. | Shredder with thickness detector |
| US7525222B2 (en) * | 2005-12-05 | 2009-04-28 | Federal - Mogul World Wide, Inc. | Sensor assembly and sensing system for sensing human tissue in a protected area of a machine |
| GB2437594B (en) * | 2006-04-24 | 2010-08-11 | Acco Uk Ltd | A shredding machine |
| US8008812B2 (en) | 2006-07-14 | 2011-08-30 | Aurora Office Equipment Co., Ltd. | Paper shredder control system responsive to touch-sensitive element |
| CN2915259Y (zh) | 2006-07-14 | 2007-06-27 | 上海震旦办公设备有限公司 | 碎纸机触碰安全装置 |
| US8754552B2 (en) * | 2006-07-14 | 2014-06-17 | Aurora Office Equipment Co., Ltd. | Permittivity-based paper shredder control system |
| DE102006032955A1 (de) * | 2006-07-17 | 2008-02-07 | Siemens Ag | Industrieanlage mit einem sicherheitsrelevanten Bereich |
| CN200951266Y (zh) * | 2006-08-03 | 2007-09-26 | 邱炎雄 | 一种防护装置 |
| US20080053994A1 (en) * | 2006-08-30 | 2008-03-06 | Aurora Office Equipment Co., Ltd. Shanghai | Paper-Breaker Wastebin Structure |
| US7757982B2 (en) | 2006-09-28 | 2010-07-20 | Fellowes, Inc. | Shredder with intelligent activation switch |
| JP2008132407A (ja) * | 2006-11-27 | 2008-06-12 | Honda Elesys Co Ltd | シュレッダー装置 |
| US7999562B2 (en) * | 2007-07-31 | 2011-08-16 | Vermeer Manufacturing Company | Apparatus and method of capacitively sensing operator presence for a stump cutter |
| GB2451513B (en) * | 2007-08-02 | 2012-04-18 | Acco Uk Ltd | A shredding machine |
| DE102008000038A1 (de) * | 2008-01-11 | 2009-07-16 | Robert Bosch Gmbh | Vorrichtung |
| US20110012584A1 (en) * | 2008-03-05 | 2011-01-20 | Artem Ivanov | Safety device, particularly for household appliances |
| DE102008002503A1 (de) * | 2008-06-18 | 2009-12-24 | Robert Bosch Gmbh | Werkzeugmaschinenüberwachungsvorrichtung |
| CN201239643Y (zh) | 2008-08-06 | 2009-05-20 | 上海震旦办公设备有限公司 | 不择纸的全自动碎纸机 |
| CN201244502Y (zh) | 2008-08-19 | 2009-05-27 | 上海震旦办公设备有限公司 | 自动碎纸机可剃钉结构 |
| US8430347B2 (en) | 2009-01-05 | 2013-04-30 | Fellowes, Inc. | Thickness adjusted motor controller |
| US8201761B2 (en) | 2009-01-05 | 2012-06-19 | Fellowes, Inc. | Thickness sensor based motor controller |
| US8091809B2 (en) | 2009-03-24 | 2012-01-10 | Fellowes, Inc. | Shredder with jam proof system |
| CN101543799B (zh) * | 2009-04-28 | 2012-10-10 | 上海震旦办公设备有限公司 | 碎纸机用保护装置 |
| CN101543800A (zh) * | 2009-05-07 | 2009-09-30 | 上海震旦办公设备有限公司 | 碎纸机防卡纸保护装置 |
| US8205815B2 (en) | 2009-05-15 | 2012-06-26 | Fellowes, Inc. | Paper alignment sensor arrangement |
| US8550387B2 (en) | 2009-06-18 | 2013-10-08 | Tai Hoon K. Matlin | Restrictive throat mechanism for paper shredders |
| US8678305B2 (en) | 2009-06-18 | 2014-03-25 | Fellowes, Inc. | Restrictive throat mechanism for paper shredders |
| US20110121656A1 (en) | 2009-11-20 | 2011-05-26 | Freescale Semiconductor, Inc. | Systems and methods for delivering power in response to a connection event |
| US8382019B2 (en) | 2010-05-03 | 2013-02-26 | Fellowes, Inc. | In-rush current jam proof sensor control |
| US8511593B2 (en) | 2010-05-28 | 2013-08-20 | Fellowes, Inc. | Differential jam proof sensor for a shredder |
| US9044760B2 (en) * | 2010-12-17 | 2015-06-02 | Jeff Buchanan | Wearable safety device for cutting machine |
| JP5722681B2 (ja) * | 2011-03-30 | 2015-05-27 | 株式会社ダイヘン | 模擬負荷装置 |
| US8723468B2 (en) | 2011-04-28 | 2014-05-13 | Aurora Office Equipment Co., Ltd. | Cooled motor |
| US8708260B2 (en) | 2011-08-08 | 2014-04-29 | Aurora Office Equipment Co., Ltd. | Depowered standby paper shredder and method |
| JP2013057616A (ja) * | 2011-09-09 | 2013-03-28 | Azbil Corp | 環境センサ |
| US9337833B2 (en) * | 2011-11-14 | 2016-05-10 | Atmel Corporation | Driven shield for shaping an electric field of a touch sensor |
| CN103378524B (zh) | 2012-04-26 | 2018-11-30 | 恩智浦美国有限公司 | 电源适配器和电源适配器的电连接器 |
| JP6325438B2 (ja) * | 2014-12-26 | 2018-05-16 | 株式会社東海理化電機製作所 | ドア錠制御システム |
| JP7128764B2 (ja) * | 2019-03-22 | 2022-08-31 | 日本航空電子工業株式会社 | 尾数算出方法、尾数算出装置、尾数計測方法、尾数計測システム、尾数算出プログラム |
| JP7336707B2 (ja) * | 2020-01-24 | 2023-09-01 | パナソニックIpマネジメント株式会社 | 安全スイッチ及びスイッチシステム |
| JP2023523348A (ja) * | 2020-07-01 | 2023-06-02 | フェスツール ゲーエムベーハー | 電動工具および電動工具の動作方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3829850A (en) * | 1971-12-17 | 1974-08-13 | Tyco Laboratories Inc | Proximity detector |
| US3886413A (en) * | 1973-01-29 | 1975-05-27 | Xenex Corp | Presence sensing and self-checking control system |
| US4518958A (en) | 1982-02-02 | 1985-05-21 | E. I. Du Pont De Nemours And Company | Capacitively coupled machine tool safety having a self-test network |
| JPS63216692A (ja) | 1987-03-06 | 1988-09-08 | アイシン精機株式会社 | 危険防止装置 |
| DE3815698A1 (de) | 1988-05-07 | 1989-11-16 | Balluff Gebhard Feinmech | Selbstpruefender, kapazitiver naeherungsschalter |
| JPH01317987A (ja) | 1988-06-15 | 1989-12-22 | Mitsubishi Electric Corp | マンコンベアの乗客検出装置 |
| US5166679A (en) * | 1991-06-06 | 1992-11-24 | The United States Of America As Represented By The Administrator Of The National Aeronautics & Space Administration | Driven shielding capacitive proximity sensor |
| DE4133426A1 (de) * | 1991-10-09 | 1993-04-15 | Bosch Gmbh Robert | Schaltungsanordnung zur auswertung und zum test eines kapazitiven sensors |
| US5587518A (en) * | 1994-12-23 | 1996-12-24 | Ford Motor Company | Accelerometer with a combined self-test and ground electrode |
| US5921367A (en) * | 1996-03-01 | 1999-07-13 | Mitsubishi Cable Industries, Ltd. | Safety device for a kneading machine using rolls |
-
2000
- 2000-03-27 JP JP2000087631A patent/JP3972064B2/ja not_active Expired - Lifetime
- 2000-03-30 KR KR1020000016394A patent/KR100655672B1/ko not_active IP Right Cessation
- 2000-03-30 SG SG200001786A patent/SG77281A1/en unknown
- 2000-03-31 EP EP20000107027 patent/EP1041336A3/en not_active Withdrawn
- 2000-04-03 US US09/541,600 patent/US6376939B1/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US6376939B1 (en) | 2002-04-23 |
| SG77281A1 (en) | 2000-12-19 |
| KR100655672B1 (ko) | 2006-12-08 |
| EP1041336A3 (en) | 2006-04-26 |
| JP2000346288A (ja) | 2000-12-15 |
| KR20010020698A (ko) | 2001-03-15 |
| EP1041336A2 (en) | 2000-10-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3972064B2 (ja) | センサ装置及び安全装置 | |
| CN104246629B (zh) | 冗余运算处理系统 | |
| JP3839254B2 (ja) | 施設の欠陥のない状態を監視し、および/または不完全状態を検出する回路装置 | |
| KR20160004199A (ko) | 전류식 직류 차단기 및 그 감시 방법 | |
| EP2752951B1 (en) | Device and Method for Preventing Arc Flashes | |
| EP2637068A1 (en) | Conveyor safety management system and method thereof | |
| CN106523412B (zh) | 框架断路器的风扇监控方法和监控装置 | |
| CN208452985U (zh) | Agv安全控制系统及安全型agv | |
| JPH1048344A (ja) | センサ及び安全装置 | |
| JP4395829B2 (ja) | 自動機械の動作許可装置 | |
| EP1549816B1 (en) | Capacitive squeeze protecting device | |
| JP2001065789A (ja) | センサ及び安全装置 | |
| JPH11132396A (ja) | センサ及び安全装置 | |
| CN210571032U (zh) | 一种用于受限空间的热灾害检测装置 | |
| CN108134371A (zh) | 电子仪器检验过程中的过温过流保护装置 | |
| KR101956192B1 (ko) | 전력 제어 설비의 아크 검출 장치 및 방법 | |
| JPH08186923A (ja) | 負荷駆動回路の接点保護装置および接点異常診断装置 | |
| KR20150121804A (ko) | 전동식 조향장치의 전자제어장치 및 그 전원제어방법 | |
| JP2018078663A (ja) | 保護継電器装置のリセット回路 | |
| US9617107B2 (en) | Web-guiding or sheet-guiding machine, and method of operating the same | |
| JP3815432B2 (ja) | コンデンサのショート故障早期検出方式および方法 | |
| CN102716795B (zh) | 基于介电常数式碎纸机控制系统 | |
| CN209312678U (zh) | 一种接触器触点监测装置及设置该装置的接触器 | |
| CN208986584U (zh) | 弧光保护装置 | |
| JP2006247439A (ja) | 原料破砕システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20031216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070417 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20070515 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20070515 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 3972064 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100622 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100622 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110622 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120622 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120622 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130622 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |