JP3840407B2 - 軸受の軸垂測定方法 - Google Patents
軸受の軸垂測定方法 Download PDFInfo
- Publication number
- JP3840407B2 JP3840407B2 JP2001369237A JP2001369237A JP3840407B2 JP 3840407 B2 JP3840407 B2 JP 3840407B2 JP 2001369237 A JP2001369237 A JP 2001369237A JP 2001369237 A JP2001369237 A JP 2001369237A JP 3840407 B2 JP3840407 B2 JP 3840407B2
- Authority
- JP
- Japan
- Prior art keywords
- bearing
- axis
- shaft
- base
- rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000691 measurement method Methods 0.000 title claims description 4
- 230000005484 gravity Effects 0.000 claims description 34
- 238000005259 measurement Methods 0.000 claims description 31
- 239000000725 suspension Substances 0.000 claims description 28
- 238000000034 method Methods 0.000 claims description 18
- 230000001678 irradiating effect Effects 0.000 claims description 6
- 239000003570 air Substances 0.000 description 21
- 230000002093 peripheral effect Effects 0.000 description 13
- 238000007664 blowing Methods 0.000 description 10
- 238000006073 displacement reaction Methods 0.000 description 9
- 238000003780 insertion Methods 0.000 description 9
- 230000037431 insertion Effects 0.000 description 9
- 239000002184 metal Substances 0.000 description 8
- 238000002788 crimping Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 239000011347 resin Substances 0.000 description 4
- 229920005989 resin Polymers 0.000 description 4
- 238000001816 cooling Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000003860 storage Methods 0.000 description 3
- 229920000178 Acrylic resin Polymers 0.000 description 2
- KAKZBPTYRLMSJV-UHFFFAOYSA-N Butadiene Chemical compound C=CC=C KAKZBPTYRLMSJV-UHFFFAOYSA-N 0.000 description 2
- PPBRXRYQALVLMV-UHFFFAOYSA-N Styrene Chemical compound C=CC1=CC=CC=C1 PPBRXRYQALVLMV-UHFFFAOYSA-N 0.000 description 2
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 2
- 229920000122 acrylonitrile butadiene styrene Polymers 0.000 description 2
- 239000012080 ambient air Substances 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 239000010687 lubricating oil Substances 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- NLHHRLWOUZZQLW-UHFFFAOYSA-N Acrylonitrile Chemical compound C=CC#N NLHHRLWOUZZQLW-UHFFFAOYSA-N 0.000 description 1
- 238000012935 Averaging Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 239000011796 hollow space material Substances 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000005415 magnetization Effects 0.000 description 1
- 238000003756 stirring Methods 0.000 description 1
Images





Landscapes
- Testing Of Devices, Machine Parts, Or Other Structures Thereof (AREA)
Description
【発明の属する技術分野】
本発明は、軸受の軸垂を測定する軸垂測定方法に関する。
【0002】
【従来の技術】
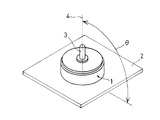
図24は、ベース2に立設するモータ1の主要部の概観を示す斜視図である。モータ1は、ベース2に対する回転軸3の角度θによって、その品質が影響し、回転軸3の角度θの傾き具合は、軸垂と呼ばれる。軸垂は、ベース2に垂直な垂直線に対するモータ1の回転軸線4の傾きである。ベース2に立設される軸受自体がベース2に対して傾いている場合は、軸受5に嵌め込まれる回転軸3もまたベース2に対して傾く。
【0003】
したがって、モータ1の組立工程において、モータ1の軸受5の軸垂を測定し、管理することが重要管理項目となっている。たとえばコンパクトディスクを回転するためのスピンドルモータでは、回転軸線4は、ベース2に垂直な垂直線に対して、±0.13度以内の範囲の傾きに抑えられる。
【0004】
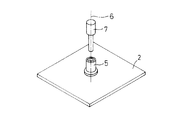
図25は、軸受5の軸垂を測定するための基準軸7を示す斜視図である。従来の技術の軸垂測定方法では、軸受軸線6を測定するために基準軸7が用いられる。従来の軸垂測定方法は、基準軸7を軸受5に嵌め込み、基準軸7とベース2とを固定した状態で、ベース2に対する基準軸7の傾きを測定して基準軸7の軸垂を求める。従来の技術の軸垂測定方法では、この求められた基準軸7の軸垂を、軸受5の軸垂として近似する。
【0005】
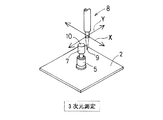
図26は、従来の技術の軸垂測定装置8の一部を示す斜視図である。従来の技術の軸垂測定装置8は、接触式変位センサ9を有する。接触式変位センサ9が、軸受5に嵌め込まれた基準軸7の端面10を、水平な2方向X、Yに走査する。これによって基準軸7の端面10のベース2に対する傾きを測定して、基準軸7の軸垂を求める。この基準軸7の軸垂を軸受5の軸垂として近似する。
【0006】
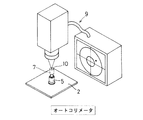
図27は、他の従来の技術の軸垂測定装置9の一部を示す斜視図である。他の従来の技術の軸受測定装置9は、非接触変位センサによって基準軸7の軸垂を測定する。軸受測定装置9は、基準軸一端面10に向けて光を照射し、一端面10から反射した光を受光することによって、基準軸一端面10のベース2に対する傾きを測定して、基準軸7の軸垂を求める。この基準軸7の軸垂を軸受5の軸垂として近似する。
【0007】
また軸受に嵌め込まれた軸の心振れを測定する装置が開示されている。たとえば、特開2000−205857号公報に開示される軸受製造装置は、軸受を測定用のロータ軸に嵌め込み、ロータ軸を回転させて、ロータ軸の外周面の変位を測定する。また特開平9−79872号公報に開示されるノズル検査装置は、ノズル端面上方に設けられるモニタが、軸受に嵌め込まれ回転するノズルの心振れを表示する。
【0008】
【発明が解決しようとする課題】
図26および図27に示す従来の技術の軸垂測定装置8,9では、基準軸7に寸法誤差がある場合は、基準軸7の軸垂と軸受5の軸垂とが等しくならず、基準軸の軸垂を軸受の軸垂として近似することができない。
【0009】
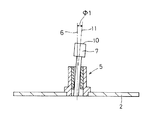
図28は、軸受5の軸線6に対して基準軸7の軸線がずれた場合を示す断面図である。基準軸7の寸法誤差によって、基準軸7の外径が、軸受5の内径よりも小さく形成された場合には、基準軸7は、軸受5の軸線6に対して基準軸7の軸線11がずれて、軸受5に嵌合されるおそれがある。また基準軸7の寸法公差によって、基準軸7と軸受5との間に隙間が形成されると、ガタついて確実に固定することができないことがある。
【0010】
軸受5の軸線6との間にずれΦ1が生じる場合には、軸受5の軸線6と基準軸7の軸線11が一致しない。したがって図26および図27に示す従来の軸垂測定装置8,9は、基準軸7の軸線11しか測定することができず、真の軸受5の軸線6を測定することができない。
【0011】
図29は、基準軸7の端面10が基準軸7の軸線11に垂直な仮想面12に対して傾斜して形成される場合を示す断面図である。図29に示すように、基準軸7の一端面10が仮想面12に対して傾斜する場合には、基準軸7の軸線に沿って一端面10に照射された光の反射光は、基準軸7の軸線11からずれて反射する。
【0012】
図27に示す従来の技術の軸垂測定装置9は、光の反射光によって、基準軸7の軸線を計測しているので、図29のように、反射光と基準軸の軸線11との間にずれΦ2がある場合には、基準軸7の軸線11を測定することができない。したがって軸受5の軸垂を求めることができない。
【0013】
同様に特開2000−205857号公報および特開平9−79872号公報に開示される軸受に嵌め込まれた軸の心振れを測定する装置であっても、軸受に嵌め込まれる軸に寸法誤差がある場合には、軸受の軸垂を測定することができない。
【0014】
したがって、本発明の目的は、基準軸の寸法精度にかかわらず、正確な軸受の軸垂を測定することができる軸受の軸垂測定方法を提供することである。
【0015】
【課題を解決するための手段】
本発明は、ベースに立設される軸受の軸垂を測定する方法であって、
軸受に嵌合可能に形成される基準軸を前記軸受内に回転可能に嵌め込み、
前記基準軸の一端面に光を照射して反射光を検出するとともに、前記基準軸を回転させ、ベースに平行な平面内における反射光の回転軌跡を調べ、
前記回転軌跡の重心を求め、前記重心に基づいて軸受の軸垂を求め、
軸垂測定対象を、ロータとステータとを含んで構成されるモータとして形成するときに、
前記基準軸と回転翼とが設けられるロータを前記軸受に嵌め込み、気体を回転翼に吹き付けてロータを回転させて軸受の軸垂を求めることを特徴とする軸受の軸垂測定方法である。
【0016】
本発明に従えば、ベースに垂直な垂直線に対する軸受軸線の傾きを測定することができる。基準軸の寸法に誤差がない場合には、基準軸の一端面に照射された光は、軸受軸線のベースに対する傾きに応じて反射する。ベースに垂直な垂直線に対して軸受軸線の傾きが大きくなるにつれて、基準軸の一端面は、ベースに対して傾き、光の反射角が大きくなる。すなわち照射光と反射光を2次元面内に投影した場合に、照射光点から反射光点までの距離が大きくなる。
【0017】
基準軸の寸法に誤差がない場合には、2次元面内に投影される反射光点は、基準軸の回転にかかわらず一箇所の位置に示され、軸受軸線の傾きと比例関係にある。したがって反射光点を求めることによって、軸受軸線の傾き、すなわち軸受の軸垂を算出することができる。
【0018】
また、図28および図29に示すように基準軸の寸法誤差によって、2次元面内に投影した反射光点と、軸受軸線を2次元面内に投影した点とが異なる場合がある。しかし本発明に従えば、基準軸を回転させて、ベースに平行な2次元面内に投影した反射光の回転軌跡の重心に基づいて、軸受の軸垂を算出することによって、基準軸の寸法誤差にかかわらず、正確な軸受の軸垂を得ることができる。
【0019】
たとえば図28に示すように、軸受軸線と基準軸の軸線とがずれた場合であっても、本発明に従って基準軸を回転させることによって、基準軸は軸受軸線まわりに回転し、基準軸の一端面もまた、軸受軸線まわりに回転する。たとえば2次元面内に投影した反射光は、閉ループ状の軌跡を描く。軸受軸線と基準軸の軸線とのずれが小さくなるにつれて、前記閉ループは、その重心に向かうように小さくなり、軸受軸線と基準軸の軸線とのずれがない場合には、軸受軸線によって決定される一点で表される。
【0020】
したがって反射光が2次元面内に投影される点が描く回転軌跡、たとえば閉ループ状の軌跡の重心は、軸受軸線と基準軸の軸線との軸線にかかわらず、軸受軸線によって決定される位置である。したがって回転軌跡の重心位置を求めることによって、基準軸の誤差の影響を除いた正確な軸受の軸線の傾きを調べることができる。
【0021】
またたとえば、図29に示すように、基準軸の一端面が基準軸軸線と垂直でない場合であっても、同様に、基準軸を回転させることによって、2次元面内に投影した反射光は、回転軌跡を描く。この回転軌跡の重心位置を求めることによって、基準軸の誤差の影響を除いた正確な軸受の軸線の傾きを調べることができる。
【0022】
このように基準軸の外周径の誤差および端面の形状誤差が形成される場合であっても、基準軸を回転させ、2次元面内たとえばベースに平行な面に投影される反射光点が描く回転軌跡の軌跡の重心を求めることによって、真の軸受軸線を得ることができ、正確な軸受の軸垂を求めることができる。
また、基準軸を回転させるために、回転翼を有し、基準軸が設けられるロータが用いられる。回転翼に向かって気体を吹き付けることによって、回転翼とともにロータを軸受軸線まわりに回転させて、軸受の軸垂を測定することができる。
またロータをモータの一部として構成した場合に、回転翼がロータ周囲の空気を攪拌する。これによってステータのコイルによって加熱された周囲の空気がモータ近辺に留まることを防止し、モータに冷却機能を持たせることができる。
【0040】
また本発明は、前記軸受に嵌め込まれたロータが回転することによって、前記回転翼は、前記軸受と反対方向に向かう気流を生じることを特徴とする。
【0041】
本発明に従えば、ロータが回転することによって回転翼から軸受と反対方向に向かう気流を生じるように形成される回転翼が用いられる。これによってロータに、軸受に向かって押さえつけられるスラストバイアス力を作用させることができる。スラストバイアス力が作用するロータは、回転軸線方向に変位することが防止され、モータの回転不良を防止することができる。
【0045】
また本発明は、基準軸回転時に、オートコリメータを用いて、前記基準軸の一端面に光を照射して反射光を検出することを特徴とする。
【0046】
本発明に従えば、オートコリメータを用いることによって、基準軸の一端面に光を照射して反射光を良好に検出することができる。
【0075】
【発明の実施の形態】
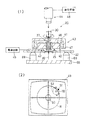
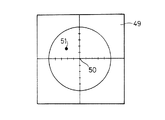
図1は、本発明の実施の一形態の軸受の軸垂測定装置20の一部を示し、図1(1)は、軸垂測定装置20の断面図であり、図1(2)は、軸垂測定時の表示画面を示す正面図である。軸垂測定装置20は、ベース22に立設された軸受25の軸垂を測定する装置である。軸受25の軸垂は、軸受25の軸線26がベース22に垂直な垂直線に対して傾く角度である。
【0076】
軸垂測定装置20は、基準軸27と、回転手段40と、変位検出手段であるオートコリメータ44とを含んで構成される。基準軸27は、軸受25に嵌合可能に形成される。基準軸27は、軸受25の内径とほぼ等しい外径を有し、軸線方向一端面30は、基準軸27の軸線31に垂直な平面に形成される。また、基準軸一端面30は、鏡面であり、たとえば一端面30にメッキ処理が行われて鏡面となる。またたとえば、一端面30に鏡が貼り付けられる。
【0077】
一端面30は、基準軸27の軸受挿入方向上流側の面である。基準軸27は、挿入方向下流側の端部に比べて挿入方向上流側端部の外径が大きく、2段の円筒状に形成される。基準軸27は、後述する軸受25に対する摩擦抵抗が小さく、かつ軸受のメタルよりも柔らかい樹脂が外周部に形成される。たとえばアクリルまたはABS樹脂(アクリロニトリル・ブタジエン・スチレン樹脂)が基準軸27の表面にコーティングされる。またたとえば、基準軸27自体がアクリルまたはABS樹脂から成ってもよい。
【0078】
回転手段40は、基準軸27を回転駆動する。回転手段40は、たとえば電磁力によって回転するモータによって実現され、ロータ治具43とコイル治具42とを含んで構成される。ロータ治具43は、計測用ロータ体41に基準軸27が嵌合される。計測用ロータ体41は、一方が開放される有底筒状に形成される。計測用ロータ体41の底部には、基準軸27が挿通する挿通孔が形成される。この挿通孔に基準軸27が圧入される。圧入された基準軸27は、その軸線が、計測用ロータ体41の軸線と同一線上に設けられる。
【0079】
コイル治具42は、略円筒状に形成され、軸受25の外周を囲んでベース22に固定される。コイル治具42は、コイル46が巻回されるコアを有する。またコイル治具42は、コイル46に電流を供給するための電源回路45が接続される。
【0080】
ロータ治具43は、基準軸27が軸受25に嵌め込まれた状態で、ベース22に固定されたコイル治具42を覆う。ロータ治具43は、コイル治具42に臨む部分にマグネット47が設けられる。このようなロータ治具43およびコイル治具42を含む回転手段40は、コイル治具42のコイル46が電通されることによって、ロータ治具43を軸受25まわりに回転させる。
【0081】
オートコリメータ44は、基準軸27の一端面30に光を照射し、一端面30から反射した反射光を検出する。オートコリメータ44は、ベース22に対して垂直な方向で、基準軸27の一端面30に向かって入射光を照射する。また、オートコリメータ44は、回転中に変化する基準軸27の一端面30のベース22に対する傾きを測定し、測定データを表示手段48に与える。
【0082】
表示手段48は、オートコリメータ44によって測定された反射光の測定データに基づいて、反射光がベース22に平行な2次元面内に投影された点51を表示する。たとえば表示手段は、CRT(Cathode Ray Tube:陰極線管)モニタを含んで実現される。
【0083】
基準軸一端面30がベース22に対して傾いている場合には、表示位置51は、図1(2)に黒点で示すように、原点位置50からずれて配置される。表示位置51は、基準軸一端面30がベース22に対して傾くにつれて、原点位置50から離れて表示される。
【0084】
たとえば図28で示したように基準軸27に寸法誤差があるとき、基準軸一端面30のベース22に対する傾きは、基準軸27の回転とともに変化する。具体的には、基準軸27が軸受25の軸線に対して傾いている場合、基準軸27を回転させることによって、軸受25の軸線に対する傾きは、同じ角度を保ち、その傾きの方向が回転に伴い巡回的に変化する。これによって基準軸一端面30の傾きの方向は、基準軸が一回転すると元の傾きの方向に戻る。したがって表示画面49に表示される表示点51も、基準軸27が一回転すると元の位置に戻る。このように表示画面49に表示される表示点51は、基準軸27が回転することによって、その軌跡52は、表示画面内に閉ループ状となる回転軌跡を描く。なお、閉ループ形状が得られない場合は、その回転軌跡の曲線を平均化して擬似閉ループを求めるようにしてもよい。
【0085】
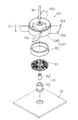
図2は、軸垂測定対象である軸受25が設けられるブラシレススピンドルモータ21を示す分解斜視図である。軸受25は、ベース22から立設する。軸受25は、たとえばコンパクトディスク(CD)またはデジタルバーサタイルディスク(DVD)等の円板状記憶媒体を回転させるモータ21の一部を構成する。モータ21は、円板状記録媒体を振れなく回転させる必要があり、モータ21の出力軸34は、ベース22に対して垂直に延びることが好ましい。出力軸34のベースに対して垂直に延びる垂直線に対する傾きの許容値は小さく、たとえば垂直線に対して、±0.13度以内の傾きαに製造される。この許容寸法を満たすモータ21を製造するために、特に軸受25の軸垂を正確に測定する必要がある。
【0086】
モータ21は、軸受25と、ステータを構成するコア57と、ロータ37とを含んで構成される。コア57は、所定の形状に形成されるコアシートが積層される突極にコイルが巻回される。またロータ37は、マグネット35と、マグネット35を収容するロータ体36とを含んで構成される。マグネット35は、ロータ体36の内周面に固定される。
【0087】
軸受25は、たとえば焼結含有軸受である。焼結含有軸受は、円筒形に形成され、潤滑油が含油されるメタル54とメタル54の外周面を覆うハウジング53とを含んで構成される。メタル54に嵌め込まれた出力軸34が回転すると、メタル54に含浸されていた潤滑油が、出力軸34とメタル54の内周面との間にしみだす。これによって出力軸34を円滑に回転させることができる。
【0088】
軸受25、コア57、ロータ37および出力軸34は、ともに同一線上に配置されるように形成される。コア57は、軸受25の外周部を覆ってベース22に固定される。ロータ体36は、厚み方向に挿通する挿通孔38が形成される。出力軸34は、前記挿通孔38に圧入される。モータは、コア57とマグネットとが隙間を開けて対向した位置に配置される。
【0089】
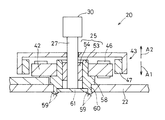
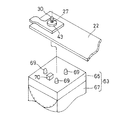
図3は、軸垂測定装置20のロータ治具43付近を拡大して示す断面図である。また図4は、軸垂測定装置20のロータ治具43付近を示す斜視図である。軸受25の軸垂は、ベース22に軸受25が固定された状態で測定される。したがって図2に示すコア57、ロータ37および出力軸34をモータ21として組み立てる前に軸受25の軸垂測定が行われる。モータ21として組み立てる前に軸受25の軸垂を測定することができるので、軸垂許容値を超えた軸受25を取り除いて、正常な軸受のみをモータ21として構成することができる。
【0090】
ハウジング53は、軸線方向一方側A1部分に設けられ、半径方向外方に突出するベース当接部58が形成される。またハウジング53は、ベース当接部58に連なり、ベース当接部58からさらに軸線方向一方側A1に突出し、ベース当接部58よりも半径方向内方に嵌入したカシメ片60とが形成される。またカシメ片60の内周面には、ハウジング25の軸線方向一方側A1を塞ぐ底板61が嵌め込まれる。カシメ片60の先端には、二股に分かれる二股部59が形成される。
【0091】
ベース当接部58がベース22にハウジング軸線方向一方側A1から当接し、カシメ片60がベース22を厚み方向に挿通した状態で、二股部分59が両側に開くように折り曲げられる。二股部分59の折り曲げられた一方の部分は、ベース22にハウジング53の軸線方向他方側A2から当接する。これによってベース当接部60の軸線方向一方側A1の面と、二股部59の軸線方向他方側の面A2とが協働して、ベース22を挟持する。これによって軸受25がベース22に締結される。
【0092】
上述のように、軸受25は、カシメ片59がカシメられてベース22に固定されるので、ベース22に対して、軸受軸線26が垂直に配置されないおそれがある。したがって軸受25の軸垂を正確に測定し、軸垂が許容範囲を超えた軸受25を取り除く必要がある。
【0093】
軸垂測定装置20は、モータ21として構成されるロータ37およびコア57に替えて、測定用の治具であるロータ治具43およびコイル治具42を有する。ロータ治具43およびコイル治具42は、ベース22および軸受25に着脱可能に形成される。これによって軸受25の軸垂測定後に、各治具42,43を取外し、軸垂許容範囲内に収まる軸受25を次工程に進めることができる。ロータ治具43およびコイル治具42を、図2に示すモータを構成するコア57およびロータ37と類似した構成にすることによって、各治具43,42を新たに形成する手間を省くことができる。
【0094】
図5は、軸受25に嵌め込まれた基準軸27の状態を示す軸受部分の拡大断面図と、そのとき表示される表示画面49を示す。なお、図5において、時計まわりの角度を負とし、時計と反対まわりの角度を正とする。
【0095】
図5(1)には、基準軸27が寸法誤差なく形成され、軸受軸線26がベース22に対して垂直に延びる状態を示す。また、図5(2)は、図5(1)の状態での表示画面を示す。基準軸27に寸法誤差がない場合には、軸受25に嵌め込まれた基準軸27は、その軸線31が軸受軸線26と同一線上に延びる。また、基準軸27の一端面30が、基準軸27の軸線31に垂直な平面に形成される。したがって軸受25に嵌めこまれた基準軸27の一端面30は、ベース22に対して平行に配置され、ベース22に垂直な垂直線74に対して垂直な面となる。
【0096】
このように一端面30が、ベース22に対して平行になる場合、オートコリメータ44によって照射された入射光75に対する反射光76、すなわちベース22に対して垂直に入射する入射光75に対する反射光76は、入射光75と同じ経路をたどる。
【0097】
また、基準軸27が回転したとしても、基準軸27の軸線31と軸受軸線26とが同一線上に形成されるので、一端面30がベース22に対して傾くことがない。したがって、反射光76は、基準軸27の回転にかかわらずその反射方向が一定となる。これによってベース22に平行な2次元面55に投影される反射光76の位置は、基準軸27の回転にかかわらず、一点の位置51に投影される。
【0098】
表示手段48によって表示される表示画面49は、2次元平面55に投影される入射光75の位置が原点位置50となり、2次元平面55に投影される反射光76の位置が表示点51となる。したがって、図5(1)に示すように、基準軸27および軸受25に誤差がなく、軸受軸線26がベース22に対して垂直な場合、表示画面49は、図5(2)に示すように、表示画面内の原点位置50と等しい位置に表示点51が表示される。
【0099】
これによって、基準軸27の回転にかかわらず、原点位置50の一点に表示点51が表示された場合には、軸受軸線26とベース22に垂直な垂直線74とが等しく、軸受軸線26がベース22に垂直であることを示す。
【0100】
図5(3)には、基準軸27の外径が軸受25の内径よりも小さく形成され、軸受軸線26がベース22に対して垂直に延びる状態を示す。また図5(4)は、図5(3)の状態での表示画面を示す。
【0101】
基準軸27の寸法誤差によって、その外径が軸受25の内径よりも小さく形成される場合には、軸受25に嵌め込まれた基準軸27は、その軸線31が軸受軸線26に対して傾き、これによって基準軸27の一端面30が、軸受軸線26に垂直な平面77に対して傾く。軸受軸線26がベース22に垂直に延びるので、たとえば軸受軸線26に対して、基準軸27の軸線31がβ度傾いた場合は、基準軸27の一端面30は、ベース22に対してβ度傾く。
【0102】
一端面30が、ベース22に対してβ度傾いた場合、入射光75に対する反射光76は、入射光75から2β度傾いて反射する。また、基準軸27が回転した場合には、基準軸27の軸線31は、軸受軸線26まわりに回転し、一端面30のベース22に対する傾斜方向が変化する。また反射光76は、基準軸27の回転にともなってその反射方向が変化する。たとえば図5(3)に実線で示す位置にある基準軸27が、軸受軸線26まわりに180度角変位した位置を、図5(3)に2点鎖線で示す。このときの反射光176も、軸受軸線26まわりに180度移動し、一端面30入射光に対して、2βの角度で反射する。また基準軸27が一回転すると、反射光の方向も一回転し、元の位置に戻る。したがって、図5(4)に示すように表示画面に表示される表示点51は、回転軌跡の一例示である閉ループに沿って移動する。このとき表示点51は、軸受軸線26が2次元面55に投影される点、すなわち原点位置50を内に含む閉ループに沿って移動する。
【0103】
反射光は、基準軸27の回転にともなって、軸受軸線26まわりに移動する。軸受軸線26に対する基準軸27の軸線31の傾斜角度βが小さくなると、図5(1)に示す状態に近づき、閉ループが小さくなる。このとき閉ループは、閉ループの重心位置に向かって小さくなる。したがって閉ループの重心位置は、傾斜角度βにかかわらず、軸受軸線26に応じて決定される。したがって軌跡52の重心を計算で求めることによって、軸受軸線26ひいては、軸受25の軸垂を求めることができる。これによって基準軸27が軸受軸線26に対してずれた状態で、軸受25に嵌め込まれた場合であっても、軸受25の軸垂を求めることができる。
【0104】
図5(5)には、基準軸27の一端面30が、基準軸の軸線31に垂直な面に対して傾いて形成され、軸受軸線26がベース22に対して垂直に延びる状態を示す。また図5(6)は、図5(5)の状態での表示画面を示す。
【0105】
基準軸27の一端面30が、基準軸27の軸線31に垂直な面73に対して傾いて形成される場合には、軸受25に嵌め込まれた基準軸27の一端面30は、軸受軸線26に垂直な平面に対して傾く。軸受軸線26がベース22に垂直に延び、たとえば基準軸27の一端面30が、基準軸27に垂直な面73に対してγ度傾いた場合は、基準軸27の一端面30は、ベース22に対してγ度傾く。
【0106】
一端面30が、ベース22に対してγ度傾いた場合、反射光76は、入射光75に対して2γ度傾いて反射する。また、基準軸27が回転した場合には、基準軸27の一端面30が軸受25の軸線まわりに傾いて回転する。したがって図5(3)と同様に、反射光76は、基準軸27の回転にともなってその反射方向が変化する。これによって、ベース22に平行な2次元面55に投影される反射光76の軌跡52は、閉ループに沿って移動する。このとき表示点51は、軸受軸線26が2次元面55に投影される点、すなわち原点位置50を内に含む閉ループに沿って移動する。
【0107】
基準軸27の回転にともなって、軸受軸線26まわりに移動する。基準軸27の軸線31に対する基準軸27一端面30の傾斜角度γが小さくなると、図5(1)に示す状態に近づき、閉ループが小さくなる。このとき閉ループは、閉ループの重心位置に向かって小さくなる。したがって閉ループの重心位置は、傾斜角度γにかかわらず、軸受軸線26に応じて決定される。したがって軌跡52の重心を計算で求めることによって、軸受軸線26ひいては、軸受25の軸垂を求めることができる。これによって基準軸27の軸線31に垂直な面に対して、基準軸27の一端面30が傾斜していた場合であっても、軸受25の軸垂を求めることができる。
【0108】
図6は、軸受25に嵌め込まれた基準軸27の状態を示す軸受部分の拡大断面図と、その状態で表示される表示画面49を示し、図6(1)には、基準軸27が寸法誤差なく形成され、軸受軸線26がベース22に対して垂直に延びる垂直線74に対して傾いている状態を示す。また、図6(2)は、図6(1)の状態での表示画面を示す。なお、図6において、時計まわりの角度を負とし、時計と反対まわりの角度を正とする。
【0109】
基準軸27の寸法誤差がない場合には、軸受25に嵌め込まれた基準軸27は、その軸線31が軸受軸線26と同一線上に延びる。また基準軸27の一端面30が、基準軸27の軸線31に垂直な平面に形成される。たとえば軸受軸線26が、ベース22に垂直な垂直線74に対してσ度傾いているとすると、軸受25に嵌めこまれた基準軸27の一端面30は、ベース22に平行な面77に対してσ度傾いた面となる。
【0110】
このように一端面30が、ベース22に対してσ度傾くので、ベース22に対して垂直な方向に照射された入射光75に対する反射光76は、入射光75から2σ度傾いて反射する。また、基準軸27が回転したとしても、基準軸27の軸線31と軸受軸線26とが同一線上に形成されるので、一端面30のベース22に対する傾きが変化することがない。したがって、反射光76は、基準軸27の回転にかかわらずその反射方向が一定となる。これによってベース22に平行な2次元面55に投影される反射光76の位置は、基準軸27の回転にかかわらず、一点の位置に投影される。
【0111】
したがって、図6(2)に示すように、基準軸27および軸受25に誤差がなく、軸受軸線26がベースに垂直な垂直線74に対して傾いている場合、表示画面49は、表示画面内の原点位置50からずれた一点に表示点51が表示される。このずれる量は、ベース22に垂直な垂直線74に対して、軸受軸線26が傾く角度σの2倍の角度となる。これによってこのずれ量を測定することによって、軸受軸線26の傾きを知ることができ、これによって軸受25の軸垂を求めることができる。
【0112】
図6(3)には、基準軸27の外径が軸受25の内径よりも小さく形成され、軸受軸線26がベース22に対して垂直に延びる垂直線74に対して傾いている状態を示す。また図6(4)は、図6(3)の状態での表示画面を示す。
【0113】
基準軸27の外径が軸受25の内径よりも小さく形成される場合には、軸受25に嵌め込まれた基準軸27は、その軸線31が軸受軸線26に対して傾き、たとえばβ度傾く。図6において、βは、時計まわりに傾き、負の値となる。また、たとえばベース22に垂直に延びる垂直線74に対して、軸受軸線26がσ度傾く。図6において、σは、反時計まわりに傾き、正の値である。このように、基準軸27の軸線31が軸受軸線26に対して傾き、かつ軸受軸線26が、ベース22に垂直な垂直線74に対して傾いた場合には、軸受25に嵌め込まれた基準軸27の一端面30は、ベース22に対して平行な面77に対して傾き、基準軸27の回転とともにその傾きが変化する。
【0114】
たとえば、図6(3)に、紙面に垂直な点において反時計まわりに最も角変位した状態の基準軸27を実線で示し、この状態の基準軸27の一端面30は、ベース22に対して(σ+β)度傾く。図6において、βが負の値であり、|β|>|σ|となるので、一端面30は、ベースに平行な面77に対して、反時計まわりに(|β|−σ)度傾く。
【0115】
したがってベース22に対して垂直な方向に照射された入射光75に対する反射光76は、入射光75から2(σ+β)度傾いて反射する。図6において、反射光は、入射光に対して、反時計まわりに2(|β|−σ)度傾いた方向に反射する。
【0116】
また、基準軸27が回転した場合には、基準軸27の軸線31は、軸受軸線26まわりに回転し、基準軸27の一端面30もまた軸受軸線26まわりに回転する。したがって、反射光76は、基準軸27の回転にともなってその反射方向が変化する。たとえば基準軸27が軸受軸線26まわりに180度角変位すると、基準軸27は、図5(3)において、2点鎖線で示す位置に移動し、ベース22に対して反時計まわりに最も傾いた状態となる。このとき基準軸27の一端面30は、ベース22に対して、(σ−β)度傾く。図6において、βが負の値であるので、一端面30は、ベースに平行な面77に対して、時計まわりに(σ+|β|)度傾く。このときの反射光176は、図6(3)に実線で示す方向から、軸受軸線26まわりに180度角変位するとともに、入射光75から2(σ−β)度傾いて反射する。図6において、反射光は、入射光に対して、反時計まわりに2(σ+|β|)度傾いた方向に反射する。
【0117】
反射光は、入射光に対して、2(σ+β)度から2(σ−β)度の間で回転する。したがって反射光は、ベース22に垂直な垂直線74に対して、軸受軸線26が傾く角度σの2倍である角度2σを必ず内に含んで、入射光まわりに回転する。すなわち入射光に対して、点から軸受軸線26が傾く角度σの2倍である角度2σに傾斜して延び、2次元平面55に投影される軸垂点78のまわりを反射光が移動する。
【0118】
軸受軸線26がベース22に垂直な垂直線74に対する角度σが大きくなるほど、閉ループは、真円から楕円形に変形する。しかし、軸垂測定対象となる軸受25は、その軸線26がベース22に垂直な垂直線74に対する傾斜角度σがすでに小さい値なので、閉ループは、真円に近い形状になる。また軸受軸線26に対する基準軸27の軸線31の傾斜角度βが、ゼロである場合には、図6(1)に示される状態となる。軸受軸線26に対する基準軸27の軸線31の角度βが大きくなるにつれて、軸垂点78を含む閉ループが大きくなる。
【0119】
これによって、図6(4)に示すように、表示画面49は、閉ループ状の軌跡52のほぼ重心位置に軸垂点78が形成される。したがって基準軸27を回転させることによって、反射光が2次元面55に投影された点が描く閉ループ状の軌跡52を測定し、その重心を求めることによって、軸垂点78を近似することができる。軸垂点78を求めることによって、軸受軸線26がベース22に垂直な垂直線74に対する角度σ、すなわち軸垂を求めることができる。また、軸受軸線26に対して基準軸27の軸線31がβ度傾いていても、閉ループの軌跡52の重心位置を求めることによって、正確な軸受25の軸垂を求めることができる。
【0120】
図6(5)には、基準軸27の一端面30が、基準軸の軸線31に垂直な面に対して傾いて形成され、軸受軸線26がベース22に対して垂直に延びる状態を示す。また図6(6)は、図6(5)の状態での表示画面を示す。
【0121】
基準軸27の一端面30が、基準軸27の軸線31に垂直な面73に対して傾いて形成される場合には、軸受25に嵌め込まれた基準軸27の一端面30は、軸受軸線26に垂直な平面73に対して傾き、たとえばγ度傾く。図6において、γは負の値である。また、たとえばベース22に垂直に延びる垂直線74に対して、軸受軸線26がσ度傾く。図6において、σは正の値である。このように、基準軸27の一端面30が基準軸27の軸線31に対して傾き、かつ軸受軸線26が、ベース22に垂直な垂直線74に対して傾いた場合には、軸受25に嵌め込まれた基準軸27の一端面30は、ベース22に対して傾き、基準軸27の回転とともにその傾きが変化する。
【0122】
たとえば、図6(5)の紙面に垂直な点において時計まわりに最も角変位した状態の基準軸27を実線で示し、この状態の基準軸27の一端面30は、ベース22に平行な面77に対して(σ+γ)度傾く。図6において、γが負の値であり、|γ|>|σ|となるので、一端面30は、ベースに平行な面77に対して、反時計まわりに(|γ|−σ)度傾く。
【0123】
したがって、ベース22に対して垂直な方向に照射された入射光75に対する反射光76は、入射光75から2(γ+σ)度傾いて反射する。図6において、反射光は、入射光に対して、反時計まわりに2(|γ|−σ)度傾いた方向に反射する。
【0124】
また、基準軸27が回転した場合には、基準軸27の軸線31は、軸受軸線26まわりに回転し、基準軸27の一端面30もまた軸受軸線26まわりに回転する。したがって、反射光76は、基準軸27の回転にともなってその反射方向が変化する。たとえば基準軸27が軸受軸線26まわりに180度角変位すると、基準軸27は、図6(5)において、2点鎖線で示す位置に移動し、ベース22に対して反時計まわりに最も傾いた状態となる。このとき基準軸27の一端面30は、ベース22に対して、(σ−γ)度傾く。図6において、γが負の値であるので、一端面30は、ベース22に平行な面77に対して、時計まわりに(σ+|γ|)度傾く。このときの反射光176は、図6(5)に実線で示す方向から、軸受軸線26まわりに180度角変位するとともに、入射光75から2(σ−γ)度傾いて反射する。図6において、反射光は、入射光に対して、反時計まわりに2(σ+|γ|)度傾いた方向に反射する。
【0125】
反射光は、入射光に対して、2(σ+β)度から2(σ−β)度の間で回転する。したがって反射光は、ベース22に垂直な垂直線74に対して、軸受軸線26が傾く角度σの2倍である角度2σを必ず内に含んで、入射光まわりに回転する。いいかえると、ベース22に平行な2次元面55に投影される反射光76の点は、軸受軸線26が2次元面55に投影された点を内に含む閉ループに沿って移動する。すなわち入射光に対して、点から軸受軸線26が傾く角度σの2倍である角度2σに傾斜して延び、2次元平面55に投影される軸垂点78のまわりを反射光が回転する。
【0126】
図6(4)、図6(5)の説明と同様に、表示画面49において、閉ループ状の軌跡52は、略円形に形成され、その重心位置に軸垂点78が形成される。したがって、上述のように基準軸27を回転させることによって、反射光が2次元面内に投影される点が描く閉ループ状の軌跡52を測定し、その重心を求めることによって、軸垂点78を求めることができる。
【0127】
これによって軸受軸線26がベース22に垂直な垂直線74に対する角度σ、すなわち軸垂を求めることができる。また、基準軸27の軸線31に垂直な面に対して基準軸27の一端面30がγ度傾いていても、閉ループの軌跡52の重心位置を求めることによって、正確な軸受25の軸垂を求めることができる。また反射光の軌跡は、必ずしも閉ループ状の軌跡を描かなくてもよい。たとえば反射光が回転するにつれて、回転軌跡がずれて、完全な閉ループを描かない場合であっても、オートコリメータ44または表示手段48に設けられる画像処理手段が、回転軌跡を閉ループ状の回転軌跡として近似することによってその近似した閉ループ状の軌跡に基づいて、軸受25の軸垂を求めることができる。
【0128】
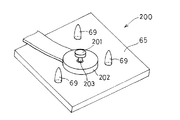
図7は、オートコリメータ44とベース22とを支持する支持台62を説明するための斜視図であり、図7(2)は乗載部65を示す斜視図であり、図7(3)は鏡面体64を示す斜視図である。軸垂測定装置20は、オートコリメータ44とベース22とを支持する支持台62を有する。
【0129】
支持台62は、ベース22を乗載する微動ステージ63と、微動ステージ63とオートコリメータ44との位置調整に用いられる鏡面体64と、オートコリメータ44を保持するオートコリメータ保持部68と、微動ステージ63およびオートコリメータ保持部68を支持する土台部72とを含んで構成される。
【0130】
微動ステージ63は、ベース22を乗載する乗載部65と、水平方向に沿って延びる第1方向Xまわりに乗載部65を角変位させる第1微動部66と、水平方向に沿って延び、かつ第1方向Xに直行する第2方向Yまわりに乗載部65を角変位させる第2微動部67とを有する。乗載部65は、上方に向かって突出する3つの支持片69と、マグネットベース70とが設けられる。ベース22は、3つの支持片69に当接して、ベース22が乗載部65上に乗載される。ベース22が乗載された状態で、マグネットベース70がベース22を磁力によって吸引することによって、ベース22が軸垂測定時にずれることを防止して、3つの支持片69上に確実に固定する。
【0131】
また微動ステージ63は、基準軸の回転軸線と垂直な面に沿う方向である第1方向Xおよび基準軸の回転軸線と垂直な面に沿う方向でありかつ第1方向に直交する第2方向Yに沿って、ベース22を移動させる移動手段を有する。たとえば、土台部72に形成される案内溝72a,72bに微動ステージ63が嵌り込む。案内溝72a,72bは、第1方向Xおよび第2方向Yに形成される。これによって微動ステージ63は、第1方向Xおよび第2方向Yに沿って平行に移動する。これによって、測定位置から微動ステージ63を移動させた状態で、ベース22および鏡面体64の取付けおよび取外しを行うことができる。オートコリメータ44などの測定装置がベース22の取付けおよび取外し作業を阻害せずに作業を容易に行うことができる。
【0132】
オートコリメータ44は、オートコリメータ保持部68によって保持される。オートコリメータ44は、微動ステージ63上に乗載されるベース22よりも上方に配置され、上方からベース22上に取付けられる基準軸27の一端面30に光を照射し、反射光を測定する。鏡面体64は、短円柱状に形成され、その厚さが均一に形成され、厚み方向両方の面が平坦に形成される。また鏡面体64の厚み方向一方側の面は、鏡面に形成される。
【0133】
図8は、微動ステージを調整する前の状態であって、鏡面体70に入射光を照射したときの表示画面49を示す図であり、図9は、軸受25が立設されたベース22を乗載部65に乗載する状態を示す斜視図であり、図10は、軸受25の軸垂測定の手順を示すフローチャートである。以下図7〜図10を参照して、軸受25の軸垂測定手順を説明する。
【0134】
軸受25の軸垂測定の手順として、まず図7(1)に示すように、ステップs1では、3つの支持片69上に鏡面体70の鏡面71を上方にして鏡面体64を乗載する鏡面体乗載動作が行われる。鏡面体乗載動作が完了するとステップs2に進む。ステップs2では、オートコリメータ44によって、鏡面体70の鏡面71に向けて光を照射し、反射した反射光を測定し、表示手段48に表示する表示点表示動作が行われる。鏡面体70の鏡面71に対して、入射光の進む方向が垂直でない場合には、図8に示すように表示点51は、原点位置50からずれて配置される。ステップs3では、ステップs2によって表示画面49に表示された表示点51が、原点位置50にあるか否かを判断し、表示点51が原点位置50にある場合はステップs5に進み、そうでない場合はステップs4に進む。
【0135】
ステップs4では、微動ステージ63の第1微動部66および第2微動部67によって、乗載部65を第1方向Xおよび第2方向Yまわりに角変位させて、表示画面49によって表示される表示点51を原点位置50に移動させる調整動作が行われる。表示点51を原点位置50に移動させることによって、入射光の進む方向に対して垂直な面に、鏡面体64を配置することができる。調整動作が完了すると、ステップs5に進む。
【0136】
ステップs5では、まず鏡面体64を乗載部65から取外し、次に軸受25が立設されたベース22にロータ治具43およびコイル治具42を設け、次に図9に示すように乗載部65にベース22を乗載するベース乗載動作が行われる。乗載部65に乗載されたベース22は、マグネットベース70によって乗載部65に固定され、固定が完了すると、ステップs6に進む。支持片69に乗載される厚みが一様なベース22は、入射光に対して垂直に配置される。
【0137】
ステップs6では、オートコリメータ44から軸受25に嵌め込まれる基準軸27を回転させるとともに、基準軸27の一端面30に光を入射させ、反射光を測定して、表示画面49に反射光が2次元面内に投影される点の軌跡52を表示させる測定動作が行われる。ベース22と基準軸27の一端面30が平行な場合は、表示画面49の表示位置51は、原点位置50に表示される。また、ベース22に対して、基準軸27の一端面30が傾いている場合は、表示画面49の表示位置51は、原点位置50からずれて表示される。表示位置51は、基準軸27の一端面30の傾きが大きいほど原点位置50から離れて表示される。ステップs5で閉ループ状の軌跡52が得られたら、ステップs7に進む。
【0138】
ステップs7では、前記閉ループ状の軌跡52の重心位置を求め、この重心位置を軸受軸線26と近似する計算動作を行い、計算動作が完了すると、ステップs8に進み、軸受の軸垂測定動作が完了する。
【0139】
以上のように、本実施の形態の軸垂測定装置に従えば、基準軸27を回転させ、基準軸一端面30のベースに対する傾きの変化を調べることによって、基準軸27の寸法精度にかかわらず、正確な軸受25の軸垂を求めることができる。具体的には、基準軸27にベース22に対して垂直な入射光を照射し、反射光がベース22に平行な2次元面55に投影される点の軌跡52を測定する。2次元面内に投影される点の軌跡52は回転軌跡となり、この回転軌跡の重心位置を求める。重心位置は、軸受の軸線の傾きσによって決定され、基準軸27の誤差とは無関係である。したがって重心位置を調べることによって、基準軸の誤差を取り除いた軸受自体の傾きσ、すなわち軸垂を求めることができる。また、光によって非接触に基準軸27の一端面30を測定するので、微小な基準軸27の一端面30の傾きを測定することができる。
【0140】
また、モータのステータ37およびロータ57の構成に類似したコイル治具42およびロータ治具43を用いることによって、ステータ37およびロータ57を改良することで、各治具42,43を形成することができる。
【0141】
また軸垂測定装置20は、2次元面内における閉ループ状の軌跡52を画像処理によって計測し、前記閉ループの重心を算出する画像処理手段を含んで構成されてもよい。これによって測定者は、軸受25の軸垂を容易に判断することができ、ベース22に立設される軸受25の良否を短時間で判定することができる。さらに画像処理手段が、閉ループの重心位置に基づいて、測定される軸受25の軸垂が予め定められる軸垂範囲内であるか否かを判定することによって、より短時間で、軸受25の良否を判定することができる。
【0142】
基準軸27の一端面30は、鏡面に形成されるので、反射光が散乱することがなく、一直線に反射させることができる。これによって正確な反射角度を求めることができる。また基準軸27が軸受と当接するであろう外周部には、メタル54よりも柔らかい樹脂が設けられるので、基準軸27がメタル54を傷つけることがない。また軸受25に対する摩擦抵抗が小さい樹脂が用いられることによって、基準軸27の嵌め込み、取り出し時の負荷を低減することができる。また、基準軸27は、一端面30の外径が他端面に比べて大きく形成されるので、照射される光が基準軸の軸線からずれた場合においても、確実に反射させることができる。
【0143】
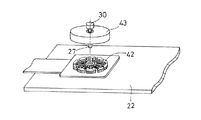
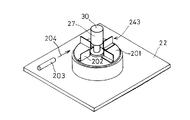
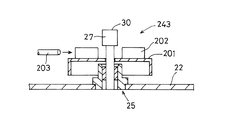
図11は、本発明の他の実施の形態のロータ治具243を示す斜視図であり、図12は、ロータ治具243を示す断面図である。ロータ治具243は、図3および図4に示すロータ治具43と類似しており、同様の構成ついては、説明を省略する。
【0144】
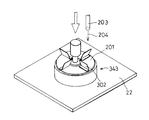
ロータ治具243は、軸線方向一端面201から突出する回転翼202が複数枚設けられる。回転翼202は、ロータ治具243の半径方向に延びる仮想半径線に対して対称に形成され、たとえば4枚形成される。各回転翼202は、軸線方向一端面201に対して、直角に屈曲し、半径方向に沿って延びる。
【0145】
ロータ治具243によって構成される軸垂測定装置は、図3および図4に示すコイル治具42を必要とせず、各回転翼202にエアー204を供給するノズル203が設けられる。ロータ治具243を軸受25に嵌め込んだ状態で、ノズル203から回転翼203に向けてエアーを供給することによって、ロータ治具243を回転させることができる。このようにロータ治具243と、ノズル203とによって、基準軸27を回転させる回転手段を軸垂測定装置が有してもよい。
【0146】
このような軸垂測定装置は、コイル治具42をベース22に固定する必要がないので、軸垂測定作業をより簡単に行うことができる。またノズル203を吹き付けてロータ治具243を回転させた状態で、ノズル203からエアーを供給することを停止し、慣性運動によって回転するロータ治具243において、軸垂測定を行うことが好ましい。これによって、ロータ治具243に負荷がかかることがなく安定した状態で、軸垂測定を行うことができ、より正確な軸垂測定を行うことができる。またノズル203から吹き付けられるエアーによって、ベース22上のロータ治具243まわりのゴミおよびほこりなどの付着物を取り除くことができる。
【0147】
また、慣性力によってロータ治具243が回転する状態で、軸受25の軸垂を求めるとともに、回転駆動力を停止した時からロータ治具243が停止するまでの時間を測定することによって、軸受25の損失トルクを調べることができる。これによって軸受25の軸垂を求めるとともに、損失トルクが大きい軸受を判別することができる。
【0148】
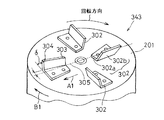
図13は、本発明のさらに他の実施の形態のロータ治具343を示す斜視図であり、図14は、ロータ治具343を示す斜視図である。ロータ治具343は、図11および図12に示すロータ治具243と類似しており、同様の構成については説明を省略し、同様の構成については、同様の符号をする。ロータ治具343は、軸線方向一端面201から突出する回転翼302が複数枚設けられる。
【0149】
回転翼302は、ロータ治具343の半径方向に延びる仮想半径線に対して、対称に形成され、たとえば4枚形成される。各回転翼302は、軸線方向一端面201に当接する当接部302aと、当接部302aから屈曲し、ロータ治具343の一端面201から突出する突出部302bとが形成される。
【0150】
突出部302bは、ロータ治具343の半径方向外方A1に進むにつれて、周方向一方B1に傾斜して立設される。周方向一方B1は、ロータ治具343回転方向と同方向であることが好ましい。さらに突出部302bは、軸線方向一端面201に対して90度より小さい所定の角度δを有して屈曲して形成される。また各回転翼302は、ロータ治具343の回転中心に対して、点対称に形成される。
【0151】
このように各回転翼302が形成されることによって、ロータ治具343の軸線方向他方側から軸線方向一端面201に向けて、たとえば上方からエアー204を吹き付けることによって、ロータ治具343を回転させることができる。突出部302bは、ロータ治具343の軸線方向一端面201から90度より小さい角度で立設しているので、回転翼302に吹き付けられたエアーは、突出部302bを回転方向に移動させる力を与え、これによってロータ治具343が回転する。また突出部302bは、ロータ治具343の半径方向外方A1に進むにつれて、周方向一方B1に傾斜して立設されるので、回転翼に吹き付けられたエアーを半径方向外方に移動しやすい。
【0152】
図13および図14に示すロータ治具343は、ノズル203によって、エアー204を供給することによって、ロータ治具343を回転させることができ、図11および図12に示すロータ治具243と同様の効果を得ることができる。さらに上方からエアー204を吹き付けることによって、ロータ治具343が軸受25に向かって押付けられ、ロータ治具343をより安定させて回転させることができる。
【0153】
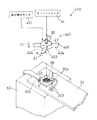
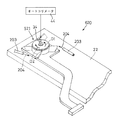
図15は、本発明のさらに他の実施の形態の軸垂測定装置420を示す斜視図である。図15に示す軸垂測定装置420は、図1に示す軸垂測定装置20と類似しており、同様の構成においては、説明を省略し同一の符号を付す。
【0154】
軸垂測定装置420は、ロータ治具443と、コイル治具42と、ノズル203と、高さ検出センサ401とを含んで構成される。高さ検出センサ401は、軸受25に嵌め込まれたロータ治具443の高さ位置を検出するセンサである。ロータ治具443は、半径方向外方に向かって突出する複数の回転翼403が設けられる。回転翼403は、ロータ治具軸線方向一方C1に進むにつれて、ロータ治具周方向一方D1に傾斜するエアー吹き付け面404が形成される。ロータ治具443は、軸受25に嵌め込まれ、ノズル203が下方から回転翼403に向けてエアー204を吹き付ける。エアー204はエアー吹き付け面404に当たり、ロータ治具443に回転力を与えることができる。
【0155】
軸垂測定装置420は、ベース22にコイル治具42が固定された状態で、ロータ治具443が軸受25に嵌め込まれる。エアー204が下方から吹き付けられることによって、ロータ治具443は、上方に向かって押し上げられる力をうける。このときロータ治具443が上方に変位する量を高さ検出センサ401によって測定することによって、ロータ治具443が上方に向かって押し上げられる力に抗する力を調べることができる。これによって軸垂測定対象となる軸受25がモータを構成した場合の、モータのロータのスラストバイアス力、すなわちモータ回転時にロータが浮き上がらないように軸受側に押さえつける力を推測することができる。また図15に示すロータ治具343は、ノズル203によって回転されるので、図11および図12に示すロータ治具243と同様の効果を得ることができる。
【0156】
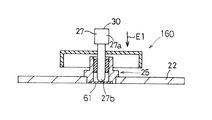
図16は、本発明の基準軸27が軸受25に嵌め込まれる部分の構造160を示す断面図である。ロータ治具は、基準軸27が圧入され、基準軸27が部分的にベース22に立設する軸受25に嵌め込まれる。基準軸27は、光が照射される一端部27aに対して反対側の他端部27b、すなわち軸受挿入方向E1下流側の端部27bが、先細に形成される。さらに具体的には、略半球状に形成され、軸受25の底板61と点接触する。これによって、基準軸27は、回転時に作用する摩擦力が少なくなり、回転時の負荷を低減することができ、基準軸27の回転を安定させることができる。このような基準軸27が圧入されたロータ治具は、回転手段によって回転される。回転手段は、電磁力によってロータを回転するステータを含んでもよく、またロータを回転させるための回転翼を含んでいてもよい。
【0157】
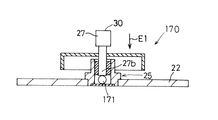
図17は、本発明の基準軸27が軸受25に嵌め込まれる部分の他の構造170を示す断面図である。図17に示す構造170は、図16に示す構造と類似しており、同様の構成については、説明を省略し、同一の符号を付す。軸受25のハウジング53内には、球体171が挿入される。軸受25に嵌め込まれた基準軸27は、その他端部27bが球体171に点接触する。これによって基準軸27は、回転時に作用する摩擦力が少なくなり、回転時の負荷を低減することができ、基準軸27の回転を安定させることができる。
【0158】
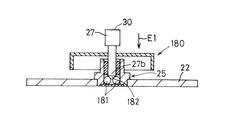
図18は、本発明の基準軸27が軸受25に嵌め込まれる部分のさらに他の構造180を示す断面図である。図18に示す構造180は、図16に示す構造と類似しており、同様の構成については、説明を省略し、同一の符号を付す。軸受25のハウジング53内には、複数の球体181が挿入される。複数の球体181は、軸受25の半径方向に並んで配置される。軸受25は、複数の球体181によって軸線26上を基準軸挿入方向E1に進むにつれて、窪む空間182が形成される。また基準軸27の他端部27bは、円錐状に形成される。軸受25に嵌め込まれた基準軸27は、各球体181と点接するピボットが形成される。これによって基準軸27は、回転時に作用する摩擦力が少なくなり、回転時の負荷を低減することができ、基準軸27の回転を安定させることができる。
【0159】
また、基準軸27の他端部27bに向かうにつれて、外径寸法が縮径するテーパが形成されてもよい。これによって、軸受の内周径と一致した部分で接触するので、軸受の内径に合わせてサイズの異なる基準軸27を用意する必要がない。
【0160】
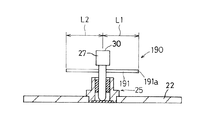
図19は、本発明のさらに他の回転手段を示す断面図である。ロータ治具に替えて、基準軸27に、基準軸27の回転軸線を挿通する棒状のピン部材191が設けられてもよい。ピン部材191は、基準軸27を貫通する。ピン部材191が基準軸27から一方側に突出する長さL1と他方側に突出する長さL2は、両側で等しい。ピン部材191の一端部191aを弾くことによって、基準軸27に回転力を与えて基準軸27を回転させる。このようにピン部材191を用いることによって、構造を簡略化することができる。また突出する長さが両側で等しいので、基準軸の回転を安定させることができる。本発明の軸垂測定装置は、このようなピン部材191を回転手段として用いることができ、他の回転手段以外の構成については、図1に示す軸垂測定装置と同様である。このような軸垂測定装置は、ピン部材191を弾く手段を有してもよい。または手動によってピン部材191を弾いてもよい。
【0161】
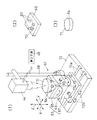
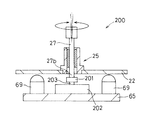
図20は、本発明のさらに他の回転手段200を示す断面図であり、図21は、回転手段200を示す斜視図である。ベース22に立設される軸受25が軸線方向両側に開放される筒状に形成される場合、基準軸27が軸受25を貫通する。回転手段200は、測定用モータ202を含んで構成される。測定用モータ202は、ベース22を乗載する乗載部65上に設けられる。測定用モータ202の出力軸203の遊端部には、マグネット201が設けられる。マグネット201は、軸受25を貫通する基準軸27の他端部27bに臨んで配置される。
【0162】
軸受25を貫通する基準軸27の他端部27bは、マグネット201に磁力によって吸着する。これによって基準軸27は、マグネット201を介して計測用モータ202の出力軸203に連結される。測定用モータ202を回転させることによって基準軸27を回転させることができる。これによって基準軸27と出力軸203とを一体的に固定する必要がなく、基準軸27と測定用モータの出力軸203との軸線が同一線上に配置させる必要がない。したがって基準軸27と出力軸203との軸合せを容易に行うことができる。本発明の軸垂測定装置は、このような測定用モータ202を回転手段として用いることができ、他の回転手段以外の構成については、図1に示す軸垂測定装置と同様である。
【0163】
図22は、本発明のさらに他のモータ521を示す分解斜視図である。モータ521は、図2に示すモータと類似しており同様の構成については、説明を省略し同一の符号を付す。モータ521は、ロータ537を有し、ロータ537は、マグネット35と、マグネット35を収容する円筒状のロータ体536を有する。ロータ537は、半径方向外方に向かって突出する複数の回転翼503が設けられる。回転翼503は、ロータ軸線方向一方C1に進むにつれて、ロータ周方向一方D1に向かうように傾斜するエアー吹き付け面504が形成される。エアー吹き付け面504にエアーが吹き付けられることによって、回転翼503は、ロータ周方向に回転する回転力が与えられる。
【0164】
図23は、本発明の他のモータ521の軸垂を測定する軸垂測定装置620を示す斜視図である。軸垂測定装置620は、モータ521の出力軸34の端面の傾きを測定するオートコリメータ44と、モータ521を回転させる回転手段とを含んで構成される。
【0165】
モータ521を回転する回転手段は、モータ521の回転翼503にエアー204を吹き付けてモータ521を回転するノズル203であってもよく、またステータのコイルを電通することによって、電磁的にモータ521を回転させる手段であってもよい。このようにモータ自体を回転させ、その出力軸34の傾きをオートコリメータ44によって測定することによって、出力軸34および軸受25の軸垂を測定することができる。
【0166】
また、ロータ537に回転翼503を設けることによって、モータ521回転時に、回転翼503がロータ周囲の空気を攪拌する。これによってステータ57のコイルによって加熱された周囲の空気がモータ近辺に留まることを防止し、モータ521に冷却機能を持たせることができる。回転翼503は、軸受25から遠ざかるにつれて、エアー吹き付け面504が周方向他方に向けて傾斜する。この周方向他方D2にロータ537を回転させることによって、回転翼503は、軸受25と反対方向に向かう気流を生じる。これによってロータ537に、軸受25に向かって押さえつけられるスラストバイアス力を与えることができる。スラストバイアス力が与えられたロータ537は、モータ軸線方向に変位することが防止され、回転不良を防止することができる。
【0167】
またノズル203によって、ロータ537を回転させて軸受25の軸垂を測定した場合、ロータ537に設けられるマグネット35によって発生する磁束が、ステータ57のコイルを通過することによって、コイルに誘起電圧が発生する。マグネット35に着磁不良がある場合には、マグネット35の着磁が正常に行われる場合に比べて誘起電圧が変動する。したがって、この誘起電圧を測定することによって、マグネット35の着磁不良を同時に調べることができる。
【0168】
上述の各構成は本発明の例示に過ぎず、発明の範囲内において構成を変更することができる。たとえば、基準軸27の一端面30の傾きを求めるために検出手段として、オートコリメータを用いたが、レーザ変位計を用いて基準軸の一端面30の傾きを求めてもよい。たとえばレーザ変位計を用いて、基準軸一端面30の3箇所を測定する。これによって、3箇所を結ぶ面を求めることができ、面の傾きを調べることができる。ベースに対して平行な2次元面内に投影される基準面に垂直な直線が描く閉ループの軌跡の重心を求めることによって、上述のように軸受25の軸垂を求めることができる。
【0169】
また、基準軸27またはロータ治具の重心が半径方向に偏って形成されてもよい。これによって、回転する基準軸7は遠心力が働き、重心に近い外周部分が、軸受25の内周面に当接するように力が働く。これによって基準軸27の少なくとも重心に近い外周部分を、軸受25の内周面に確実に当接させることができ、軸受内で基準軸27ががたつくことを防止し、内周面を確実にトレースすることができる。また、本発明の回転手段は、上述の記載に限定されず基準軸27を回転させる手段であればどのような構成であってもよい。また基準軸27を手動で回転させてもよい。
【0170】
【発明の効果】
以上のように本発明によれば、基準軸の軸径および基準軸の一端面の平面度に誤差があり、基準軸の形状がばらつくことがあっても、この基準軸の形状にかかわらず、正確な軸受の軸垂を測定することができる。したがって軸受の品質測定を確実に行うことができる。これによって、ベースに立設される軸受の良否を正確に判断することができ、品質の高い軸受を出荷することができる。
【0171】
また基準軸の誤差に軸垂測定値が影響しないので、精度の高い基準軸を製造する必要がなく、基準軸製造作業を容易にすることができる。さらに基準軸を軸受に嵌め込むときに基準軸の軸線が軸受軸線と同一線上に配置されるように精度よく配置する必要がなく、基準軸を軸受に嵌め込む作業を容易にすることができる。これによって短時間で基準軸を軸受に嵌め込むことができ、軸垂の測定に費やす時間を短縮することができる。
また、ロータに回転翼が設けられるので、回転翼に向かって気体を吹き付けることによって、回転翼とともにロータを軸受軸線まわりに回転させて、基準軸を回転させ軸受の軸垂を測定することができるとともにモータに冷却機能を持たせることができる。
【0180】
また本発明によれば、ロータに設けられる回転翼によって、スラストバイアス力を作用させることができるので、ロータが回転軸線方向に変位することが防止され、モータの回転不良を防止することができる。たとえば、軸垂測定対象をコンパクトディスク(CD)またはデジタルバーサタイルディスク(DVD)等の円板状記憶媒体を回転させるモータとして用いた場合に、回転軸線方向への変位を防止することによって、円盤状記憶媒体の浮き上がりを防止することができ、データの読み取り不良を防止することができる。
【図面の簡単な説明】
【図1】図1は、本発明の実施の一形態の軸受の軸垂測定装置20の一部を示し、図1(1)は、軸垂測定装置20の断面図であり、図1(2)は、軸垂測定時の表示画面を示す正面図である。
【図2】軸垂測定対象である軸受25が設けられるブラシレススピンドルモータ21を示す分解斜視図である。
【図3】軸垂測定装置20のロータ治具43付近を拡大して示す断面図である。
【図4】図4は、軸垂測定装置20のロータ治具43付近を示す斜視図である。
【図5】軸受25に嵌め込まれた基準軸27の状態を示す軸受部分の拡大断面図と、そのとき表示される表示画面49を示す正面図である。
【図6】軸受25に嵌め込まれた基準軸27の状態を示す軸受部分の拡大断面図と、その状態で表示される表示画面49を示す正面図である。
【図7】オートコリメータ44とベース22とを支持する支持台62を説明するための斜視図であり、図7(2)は乗載部65を示す斜視図であり、図7(3)は鏡面体64を示す斜視図である。
【図8】微動ステージを調整する前の状態であって、鏡面体70に入射光を照射したときの表示画面49を示す図である。
【図9】軸受25が立設されたベース22を乗載部65に乗載する状態を示す斜視図である。
【図10】軸受25の軸垂測定の手順を示すフローチャートである。
【図11】本発明の他の実施の形態のロータ治具243を示す斜視図である。
【図12】ロータ治具243を示す断面図である。
【図13】本発明のさらに他の実施の形態のロータ治具343を示す斜視図である。
【図14】ロータ治具343を示す斜視図である。
【図15】本発明のさらに他の実施の形態の軸垂測定装置420を示す斜視図である。
【図16】本発明の基準軸27が軸受25に嵌め込まれる部分の構造160を示す断面図である。
【図17】本発明の基準軸27が軸受25に嵌め込まれる部分の他の構造170を示す断面図である。
【図18】本発明の基準軸27が軸受25に嵌め込まれる部分のさらに他の構造180を示す断面図である。
【図19】本発明のさらに他の回転手段を示す断面図である。
【図20】本発明のさらに他の回転手段200を示す断面図である。
【図21】回転手段200を示す斜視図である。
【図22】本発明のさらに他のモータ521を示す分解斜視図である。
【図23】本発明の他のモータ521の軸垂を測定する軸垂測定装置620を示す斜視図である。
【図24】ベース2に立設するモータ1の主要部の概観を示す斜視図である。
【図25】軸受5の軸垂を測定するための基準軸7を示す斜視図である。
【図26】従来の技術の軸垂測定装置8の一部を示す斜視図である。
【図27】他の従来の技術の軸垂測定装置9の一部を示す斜視図である。
【図28】軸受5の軸線6に対して基準軸7の軸線がずれた場合を示す断面図である。
【図29】基準軸7の端面10が基準軸7の軸線11に垂直な仮想面12に対して傾斜して形成される場合を示す断面図である。
【符号の説明】
20 軸垂測定装置
21 スピンドルモータ
22 ベース
25 軸受
27 基準軸
30 基準軸の一端面
42 コイル治具
43 ロータ治具
44 オートコリメータ
49 表示画面
51 表示点
52 軌跡
Claims (3)
- ベースに立設される軸受の軸垂を測定する方法であって、
軸受に嵌合可能に形成される基準軸を前記軸受内に回転可能に嵌め込み、
前記基準軸の一端面に光を照射して反射光を検出するとともに、前記基準軸を回転させ、ベースに平行な平面内における反射光の回転軌跡を調べ、
前記回転軌跡の重心を求め、前記重心に基づいて軸受の軸垂を求め、
軸垂測定対象を、ロータとステータとを含んで構成されるモータとして形成するときに、
前記基準軸と回転翼とが設けられるロータを前記軸受に嵌め込み、気体を回転翼に吹き付けてロータを回転させて軸受の軸垂を求めることを特徴とする軸受の軸垂測定方法。 - 前記軸受に嵌め込まれたロータが回転することによって、前記回転翼は、前記軸受と反対方向に向かう気流を生じることを特徴とする請求項1記載の軸受の軸垂計測方法。
- 基準軸回転時に、オートコリメータを用いて、前記基準軸の一端面に光を照射して反射光を検出することを特徴とする請求項1または2記載の軸受の軸垂計測方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001369237A JP3840407B2 (ja) | 2001-12-03 | 2001-12-03 | 軸受の軸垂測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001369237A JP3840407B2 (ja) | 2001-12-03 | 2001-12-03 | 軸受の軸垂測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003166906A JP2003166906A (ja) | 2003-06-13 |
| JP3840407B2 true JP3840407B2 (ja) | 2006-11-01 |
Family
ID=19178667
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001369237A Expired - Fee Related JP3840407B2 (ja) | 2001-12-03 | 2001-12-03 | 軸受の軸垂測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3840407B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103884498A (zh) * | 2014-03-07 | 2014-06-25 | 奇瑞汽车股份有限公司 | 一种电动汽车充电器接口的插拔循环测试台架 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4529539B2 (ja) * | 2004-05-13 | 2010-08-25 | 日本電産株式会社 | 回転駆動装置 |
| JP2008275363A (ja) | 2007-04-26 | 2008-11-13 | Nippon Densan Corp | 流体動圧軸受の検査方法及びこの流体動圧軸受を備えたスピンドルモータ |
| CN101852604A (zh) * | 2010-06-07 | 2010-10-06 | 无锡市第二轴承有限公司 | 轴承套圈测量工装 |
| JP5903767B2 (ja) * | 2011-03-22 | 2016-04-13 | 株式会社ニコン | レンズ鏡筒 |
| CN103884932A (zh) * | 2014-03-07 | 2014-06-25 | 奇瑞汽车股份有限公司 | 一种电动汽车充电器接口的分断能力测试台架 |
| CN118002507A (zh) * | 2024-03-26 | 2024-05-10 | 宁波慈兴轴承有限公司 | 轴承端面轮廓度的检测机 |
| CN118837091B (zh) * | 2024-09-13 | 2024-12-06 | 常州市苏南环保设备有限公司 | 用于洒水喷淋设备配件的测试系统及其工作方法 |
| CN119354013A (zh) * | 2024-12-24 | 2025-01-24 | 浙江荣科翔元机械科技有限公司 | 一种轴体同轴度的检测工装及检测方法 |
-
2001
- 2001-12-03 JP JP2001369237A patent/JP3840407B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103884498A (zh) * | 2014-03-07 | 2014-06-25 | 奇瑞汽车股份有限公司 | 一种电动汽车充电器接口的插拔循环测试台架 |
| CN103884498B (zh) * | 2014-03-07 | 2017-02-22 | 奇瑞新能源汽车技术有限公司 | 一种电动汽车充电器接口的插拔循环测试台架 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003166906A (ja) | 2003-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3840407B2 (ja) | 軸受の軸垂測定方法 | |
| US20100207470A1 (en) | Spindle motor | |
| JP2000205854A (ja) | 機械部品の寸法計測方法 | |
| US6414409B1 (en) | Motor device wherein accurate sizing is possible | |
| JPH0713095A (ja) | 回転体、この回転体を駆動する駆動モータ及び回転多面鏡を備えた回転多面鏡装置、並びに回転体の回転バランス修正方法 | |
| JP2001004725A (ja) | 磁場測定装置および方法 | |
| JP4072265B2 (ja) | 回転軸の傾き測定方法 | |
| JP2005164364A (ja) | 位置検出センサの検査方法および検査装置 | |
| JP2004320990A (ja) | モータの測定方法及び測定装置 | |
| CN223258905U (zh) | 一种测量轴承摆度的传感器 | |
| JPH06208070A (ja) | 2軸駆動装置及び回転駆動装置 | |
| JP4651864B2 (ja) | スピンドルモータの製造方法 | |
| JP3413649B2 (ja) | 極小径ピンの端面測定方法及び測定装置 | |
| JP4210789B2 (ja) | ボビン検査装置及びこれを用いた検査方法 | |
| US7178393B2 (en) | Measuring apparatus and method for thin board | |
| JP7798816B2 (ja) | 計測球保持治具 | |
| JP2002213937A (ja) | 玉軸受のラジアル振れ測定方法 | |
| CN116296071B (zh) | 基于探测器数据的ct系统动平衡检测分析方法 | |
| JPH1131369A (ja) | Hddヘッド用ジンバル及びヘッド搭載方法 | |
| JP2001101777A (ja) | 光ディスク装置およびそのスピンドルモータ取付方法 | |
| CN217560538U (zh) | 电机气隙均匀度检测装置 | |
| JP2896576B2 (ja) | 回転バランス調整装置 | |
| JPH08145652A (ja) | 回転振れ検査装置 | |
| JPH0518739A (ja) | 回転体の偏心測定装置 | |
| JP2008275363A (ja) | 流体動圧軸受の検査方法及びこの流体動圧軸受を備えたスピンドルモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040930 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060509 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060710 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060801 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060807 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100811 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100811 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110811 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110811 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120811 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130811 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140811 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |