JP3816619B2 - 光学顕微鏡 - Google Patents
光学顕微鏡 Download PDFInfo
- Publication number
- JP3816619B2 JP3816619B2 JP02895697A JP2895697A JP3816619B2 JP 3816619 B2 JP3816619 B2 JP 3816619B2 JP 02895697 A JP02895697 A JP 02895697A JP 2895697 A JP2895697 A JP 2895697A JP 3816619 B2 JP3816619 B2 JP 3816619B2
- Authority
- JP
- Japan
- Prior art keywords
- nomarski prism
- optical
- retardation adjustment
- retardation
- optical microscope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Microscoopes, Condenser (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
Description
【発明の属する技術分野】
本発明は、微分干渉観察機能を有する光学顕微鏡に関するものである。
【0002】
【従来の技術】
従来、半導体ウェハや液晶基板の製造工程での検査観察には、光の干渉を利用して位相の差を色のコントラストに変換するような微分干渉観察機能を有する光学顕微鏡が用いられている。
【0003】
ところで、このような光学顕微鏡は、微分干渉観察の他に、明視野観察や暗視野観察などの各種の検鏡法も利用できるようになっており、このうち微分干渉観察では、通常の観察光学系にポラライザ、ノマルスキープリズム、アナライザをなど付加して、微分干渉観察光学系を構成している。
【0004】
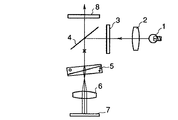
図11は、このようにして構成される微分干渉観察光学系を示すもので、照明用光源1からの照明光をコレクタレンズ2よりポラライザ3に与え、ここで直線偏光してハーフミラー4よりノマルスキープリズム5に入射させ、この直線偏光を振動方向が直角で、ある角度を持った2つの光線に分けて、対物レンズ6を通して標本7に与え、一方、標本7からの反射光を対物レンズ6を通してノマルスキープリズム5に入射し、ここで2つの光線を結合した後、アナライザ8により共通の振動成分を取り出し干渉させることで色のコントラストを得るようにしている。
【0005】
この場合、かかる微分干渉観察で重要となるリターディション調整(プリズムを通る光線のうち、偏光方向を異にする二つの光線間の位相差の調整)は、ノマルスキープリズム5を光軸に直角方向に移動させ光路差を変更させる方法と、ポラライザ3を回転させ光路差を変更させる方法が用いられている。また、従来の落射型顕微鏡では、対物レンズの種類により後側焦点が異なるため、対物レンズ毎にノマルスキープリズム5を用意しており、微分干渉観察を行う場合には、各対物レンズ6に対して用意されたノマルスキープリズム5を、ポラライザ3、アナライザ8とともに、光路上にセットするようにしている。
【0006】
このうち対物レンズ毎にノマルスキープリズム5を用意することは、後側焦点を揃えた対物レンズ6を使用することで解決しているが、現在でもノマルスキープリズム5、ポラライザ3、アナライザ8を、手作業により光路上にセットし、さらにノマルスキープリズム5の位置またはポラライザ3の回転位置でリターディションの調整を行うようにしている。
【0007】
【発明が解決しようとする課題】
ところが、これらポラライザ3、ノマルスキープリズム5、アナライザ8を手作業により光路上にセットすることは、観察標本7の上に手を出すなどしなければならないため、半導体ウェハや液晶基板の製造工程で最も嫌う人間から出るゴミ(パーティクル)が標本7に付着して、製品の品質低下を招くおそれがあり、また、このようなセット作業に加えて、さらにリターディション調整を行うのでは、さらに作業時間がかかってしまい、検査時間の短縮に大きな障害にもなっていた。このことは、特に、液晶基板の検査観察に用いられる大型の顕微鏡については、顕著な問題になっている。
【0008】
本発明は、上記事情に鑑みてなされたもので、微分干渉観察の際のポラライザおよびアナライザを始め、ノマルスキープリズムの光路に対する挿脱とリターディション調整を簡単に行うことができる微分干渉観察機能を有する光学顕微鏡を提供することを目的とする。
【0009】
【課題を解決するための手段】
本発明の光学顕微鏡は、微分干渉観察機能を有する光学顕微鏡において、微分干渉光学系を構成するポラライザおよびアナライザを前記光学顕微鏡の光路に対して挿脱する第1の駆動手段と、前記微分干渉光学系を構成するノマルスキープリズムを前記光学顕微鏡の前記光路に対して挿脱するとともに、該ノマルスキープリズムを前記光路の光軸に直角方向に移動させてリターディション調整を行う第2の駆動手段と、観察対象の種類ごとに前記リターディション調整の位置データを記憶する記憶手段と、前記記憶手段に記憶された前記位置データを元に前記第2の駆動手段を制御して前記ノマルスキープリズムを前記光路の光軸に直角方向に移動制御する制御手段とを具備したことを特徴とする。
【0015】
【発明の実施の形態】
以下、本発明の実施の形態を図面に従い説明する。
(第1の実施の形態)
図1は、本発明の第1の実施の形態が適用される微分干渉観察機能を有する光学顕微鏡の光学系の概略構成を示すもので、上述した図11と同一部分には、同符号を付している。
【0016】
この場合、ポラライザ3には、電磁ソレノイドまたはエアーシリンダなどのアクチュエータ11を接続し、このアクチュエータ11の動作によりポラライザ3を光軸上にセットできるようにしている。
【0017】
図2(a)は、アクチュエータ11としてエアーシリンダを用いた場合の概略構成を示すもので、この場合、シリンダ本体111に移動自在に設けられたシリンダ軸112先端にポラライザ3を取り付けていて、シリンダ軸112の移動にともないポラライザ3を光学系の光路に対して挿脱可能にしている。
【0018】
同様に、アナライザ8にも電磁ソレノイドまたはエアーシリンダなどのアクチュエータ12を接続し、このアクチュエータ12によりアナライザ8を光軸上にセットできるようにしている。
【0019】
図2(b)は、アクチュエータ12としてエアーシリンダを用いた場合の概略構成を示すもので、この場合もシリンダ本体121に移動自在に設けられたシリンダ軸122先端にポラライザ8を取り付け、このシリンダ軸122の移動にともないポラライザ8を光学系の光路に対して挿脱可能にしている。
【0020】
また、これらアクチュエータ11、12には、それぞれ駆動部13、14を接続していて、制御部15の制御指令にともなうこれら駆動部13、14の動作により、それぞれのアクチュエータ11、12を駆動するようにしている。
【0021】
一方、ノマルスキープリズム5には、電動モータ16と電磁ソレノイドまたはエアーシリンダなどのアクチュエータ17を接続し、アクチュエータ17によりノマルスキープリズム5を光軸に挿脱できるとともに、光軸上に挿入されたノマルスキープリズム5を電動モータ16により光軸に直角方向に微小移動することにより、リターディション調整を可能にしている。
【0022】
図3は、アクチュエータ17としてエアーシリンダを用い、電動モータ16としてステッピングモータを使用した場合のノマルスキープリズム5の支持構造を示すもので、この場合、シリンダ本体171に移動自在に設けられたシリンダ軸172先端にノマルスキープリズム5を保持したプリズム取付けブロック18を取り付け、シリンダ軸172の移動にともないプリズム取付けブロック18全体を移動させてノマルスキープリズム5を光学系の光路に対して挿脱可能にしている。
【0023】
また、プリズム取付けブロック18には、ノマルスキープリズム5を枠体51を介して直線方向に微小移動可能に設け、このノマルスキープリズム5の枠体51にステッピングモータ161の回転軸162をネジ部163を介して取付けて、ステッピングモータ161の回転軸162の回転によりネジ部163の枠体51への螺進量を調整することで、ノマルスキープリズム5の光軸と直角方向の微小移動を調整できるようにしている。
【0024】
そして、アクチュエータ17には、駆動部19を接続し、また、ステッピングモータ161には、モータ制御部20を接続して、制御部15の制御指令にともなう駆動部19およびモータ制御部20の動作により、アクチュエータ17およびパルスモータ161を駆動するようにしている。
【0025】
制御部15には、さらにメモリ21およびキー入力部22を接続している。ここで、制御部15は、キー入力部22より入力されるキー入力により予め用意されたプログラムにしたがって所定の制御指令を出力するものである。メモリ21は、リターディション調整された際のノマルスキープリズム5の位置データを記憶するものである。この場合の位置データは、ノマルスキープリズム5の移動量をエンコーダなどにより検出したものが用いられる。キー入力部22は、微分干渉観察の選択スイッチ221やリターディション調整スイッチ222などを有している。
【0026】
しかして、このような構成において、いま、半導体ウェハや液晶基板の製造工程での検査観察に微分干渉観察を行うため、キー入力部22より微分干渉観察の選択スイッチ221を操作すると、制御部15の制御指令により、それぞれの駆動部13、14、19を介してポラライザ3のアクチュエータ11、アナライザ8のアクチュエータ12およびノマルスキープリズム5のアクチュエータ17が同時に付勢される。
【0027】
これにより、まず、図2(a)に示すシリンダ本体111が付勢されると、シリンダ軸112先端に取付けられたポラライザ3がシリンダ軸112の移動にともない光軸上にセットされ、同時に、図2(b)に示すシリンダ本体121が付勢されると、シリンダ軸122先端に取付けられたポラライザ8がシリンダ軸122の移動にともない光軸上にセットされる。
【0028】
さらに、図3に示すシリンダ本体171が付勢されると、シリンダ軸172先端に取付けられたプリズム取付けブロック18全体の移動により、ノマルスキープリズム5が光軸上にセットされる。
【0029】
この状態から、さらにキー入力部22よりリターディション調整スイッチ222を操作すると、制御部15の制御指令により、モータ制御部20によりステッピングモータ161が駆動され、ステッピングモータ161の回転軸162の回転によりネジ部163の枠体51への螺進量が調整され、ノマルスキープリズム5の光軸と直角方向の微小移動によりリターディション調整が行われる。この場合、前回のリターディション調整の際のノマルスキープリズム5の位置データがメモリ21に記憶されていれば、この位置データを参照してノマルスキープリズム5の光軸と直角方向の微小移動を制御することにより、前回の微分干渉観察の際のリターディション調整値も再現できる。
【0030】
従って、このようにすれば、微分干渉観察光学系を構成するポラライザ3およびアナライザ8を、制御部15より同時に制御指令が与えられるアクチュエータ11、12により光路に対して挿脱でき、さらにノマルスキープリズム5についても、同時にアクチュエータ17により光路に対し挿脱できるとともに、電動モータ16の回転軸162の回転にともなうネジ部163の枠体51への螺進量を調整することで、ノマルスキープリズム50光軸と直角方向に微小移動させるリターディション調整をも行うことができるようにしている。これにより、従来の手作業によるパーティクルが原因する製品の品質低下を回避できるとともに、ポラライザ5、アナライザ8、ノマルスキープリズム5の光路へ挿入するための作業時間も、リターディション調整を含めても短縮できるようになり、製品の検査時間を大幅に縮めることができる。
【0031】
また、ノマルスキープリズム5のリターディション調整後の位置データがメモリ21に記憶され、この記憶データが、これ以降のリターディション調整に利用できるので、繰り返してリターディション調整位置を再現することができる。
(第2の実施の形態)
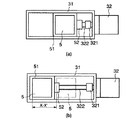
図4は、ノマルスキープリズム5の支持構造の他の例を示すもので、図3と同一部分には、同符号を付している。この場合、31はプリズム取付けブロックで、このプリズム取付けブロック31には、ノマルスキープリズム5を枠体51を介して直線方向に移動可能に設けるとともに、電動モータとしてステッピングモータ32を設けている。
【0032】
また、ステッピングモータ32の回転軸321の先端にネジ部322を取り付け、このネジ部322をノマルスキープリズム5の枠体51に設けたナット部52に螺装するようにして、ステッピングモータ32の回転軸321の回転によりネジ部322のナット部52への螺進量を可変することで、ノマルスキープリズム5の光路に対する出し入れを行い、同時にリターディション調整のための光軸と直角方向の微小移動をも可能にしている。
【0033】
しかして、このようにすれば、ノマルスキープリズム5を光軸上にセットするための動作と、光軸と直角方向の微小移動によるリターディション調整を共通のステッピングモータ32により実現していて、ステッピングモータ32の回転軸321を回転させ、回転軸321に取り付けられたネジ部322のナット部52への螺進量を調整することにより、図5(a)に示すようにノマルスキープリズム5をプリズム取付けブロック31の図示右側に移動させた状態で、光軸から外れるようになり、一方、同図(b)に示すようにノマルスキープリズム5をプリズム取付けブロック31の図示左側に移動させた状態で、光軸上にセットされるとともに、さらにx−x´の範囲での微小移動によりリターディション調整が行われるようになる。
【0034】
なお、このようなリターディション調整が行われた後のノマルスキープリズム5のx−x´の範囲での位置データは、第1の実施の形態で述べたメモリ21に書き込まれ、次回のリターディション調整には、この位置データを利用してリターディション調整位置の再現を図るようになる。
(第3の実施の形態)
上記各実施の形態の光学顕微鏡は、同じ種類の標本を観察する場合に、予めメモリに保存された位置データを用い、リターディション調整位置を自動で瞬時に再現するものである。
【0035】
しかし、かかる顕微鏡を実際に使用する場面では、毎回同じ種類の標本を観察するとは限らないこともある。また、半導体ウエハや液晶基板の製造時の検査では、製造過程によって同じ標本でも全然別の見え方になってしまうこともある。このような場合には、リターディション調整を再度行う必要がある。
【0036】
そこで、本実施の形態以下の各実施の形態では、上記微分干渉観察の自動化をさらに高め、標本種類や観察倍率の情報に基づきリターディション調整を不要にできる微分干渉顕微鏡について説明する。
【0037】
図6は、本発明の第3の実施の形態が適用される微分干渉観察機能を有する光学顕微鏡の光学系の概略構成を示すもので、上述した図1と同一部分には、同符号を付し、その説明を省略する。
【0038】
この光学顕微鏡においては、微分干渉観察光学系が第1又は第2の実施の形態の場合と同様に構成されている。すなわち、ポラライザ3、アナライザ8、ノマルスキープリズム5はアクチュエータ11,12,17の動作によって光軸上に挿脱され、さらにノマルスキープリズム5は電動モータ16による微少移動でリターディション調整が行なわれる。また、アクチュエータ11,12,17、電動モータ16は、それぞれアクチュエータ駆動部13,14,19、モータ制御部20に接続され、制御部15により制御されている。
【0039】
制御部15には、さらにメモリー21a及びスイッチの操作部22aが接続されている。
ここでメモリー21aは、ノマルスキープリズム5のリターディション調整位置を複数記憶できるように構成され、観察する標本の種類や対物レンズの観察倍率の種類に応じた複数種類のリターディション調整位置,すなわち観察位置が記憶されている。
【0040】
また、操作部22aは、メモリー21aに記憶された何れのリターディション調整位置を使用するかを制御部15に指定するようになっている。これにより、観察する標本の種類や観察倍率の種類に応じた観察位置を再現可能としている。
【0041】
図6に示すように、操作部22aには、微分干渉観察の選択とリターディション調整位置を再現するため機能を兼ねた複数の選択スイッチ221aと、リターディション調整を行うためのリターディション調整スイッチ222と、リターディション調整スイッチ222で調整した調整量をメモリー21aに保存させるよう指示する記憶スイッチ223と、さらに終了スイッチ224とが設けられている。なお、選択スイッチ221aは、複数種類の標本が選択でき、さらに、その標本についての倍率を選択して、スイッチを特定するようになっている。
【0042】
しかして、このような構成において、いま、半導体ウェハや液晶基板の製造工程での検査観察に微分干渉観察を行うため、観察を行う標本と倍率に応じた選択スイッチ221aの内の1つを操作すると、スイッチ操作による制御命令に基づき、制御部15により、まず、それぞれの駆動部13,14,19を介してポラライザ3、アナライザ8、及びノマルスキープリズム5が光路上にセットされる。さらに選択されたスイッチ221aに該当するメモリー21a内のメモリー番地に記憶されたリターディション調整位置を元にモータ制御部20が駆動され、目的の観察状態が再現される。
【0043】
以上により、選択スイッチ221aに選択された検査対象に対応した各部の調整が終了し、観察可能となる。
次に、今セットした標本と異なる種類の標本を観察すべく、顕微鏡にセットする標本の種類を変更した場合には、この新たな標本に対応する選択スイッチ221aを押すと、上記場合と同様な動作により新たな標本についてのリターディション調整が得られる。また、同一の種類の標本であっても拡大率を変更したい場合なども、対応する対物レンズ倍率の選択スイッチ221aを押すことにより必要なリターディション調整が得られる。
【0044】
また、このような自動的なリターディション調整後に、さらに手動でリターディション調整を変更する必要があるときには、リターディション調整スイッチ222が操作され、所定の調整が実行される。この変更されたリターディション調整位置は、記録スイッチ223の操作により、選択スイッチ221aの選択位置に該当するメモリー21a内メモリー番地に記録され、次回からリターディション調整に供される。
【0045】
微分干渉観察を終わりにするには、終了スイッチ224を操作することで、ポラライザ3、アナライザ8、ノマルスキープリズム5が光路上から排除される。このように、本実施の形態の光学顕微鏡では、第1の実施の形態の構成の他、観察する標本や観察する倍率等の条件によってノマルスキープリズムのリターディション調整位置を複数記憶できるメモリー21a及びそのメモリー番号を表す選択スイッチ221aを設けたので、上記実施の形態の効果を奏する他、微分干渉観察を行う場合に、観察する標本や倍率等の条件に応じた選択的なリターディション調整を実行でき、複数種類の標本を検査する場合でも各標本について短時間で常に同じリターディション状態が得られる。
【0046】
したがって、観察標本が変わる度にリターディション調整を行う必要がなくなり、作業時間の大幅な短縮ができる。さらに、作業者が変わっても同じ観察状態を得ることができ、半導体ウエハや液晶基板の製造工程での検査では、作業者に起因するばらつきを押さえることができ、品質の安定・向上につながる。
【0047】
なお、本実施の形態においては、観察する標本の種類や観察倍率の種類に応じて観察位置を再現可能な構成としたが、例えば対物レンズの種類が変更される場合に、レンズ種類にも応じて選択的なリターディション調整が実行できるように構成してもよい。
(第4の実施の形態)
図7は、本発明の第4の実施の形態が適用される微分干渉観察機能を有する光学顕微鏡の光学系の概略構成を示すもので、上述した図6と同一部分には、同符号を付し、その説明を省略する。
【0048】
この光学顕微鏡においては、制御部15に着脱可能なメモリーカード23が取り付けられる他、第3の実施の形態と同様に構成されている。メモリーカード23には第3の実施の形態のメモリ21aと同様に複数種類のリターディション調整位置が記録される。
【0049】
本実施の形態においては、リターディション調整位置の情報の供給形態が着脱可能なメモリーカード23に変更されただけで、その動作自体は第3の実施の形態の場合と同様であり、少なくとも同様な効果を奏する。
【0050】
しかし、本実施の形態では、リターディション調整位置の情報をメモリーカード23に記憶させるようにしたため、複数枚のカード23を使用することでより多数種類の調整位置の情報の保存できるようになるとともに、カード毎の情報分類が可能になり情報管理が容易となる。
【0051】
例えば、半導体ウエハや液晶基板の製造工程では、製造する品種毎にカード分類を行い、製造工程の分類を選択スイッチ221aで行うようにすることもできる。すなわち、製造している製品の品種に応じてカード23を制御装置15に差し込み、リターディション選択スイッチ221aではその検査対象となる製造工程の種類及び倍率を選択できるようにスイッチ種類を設定しておけば、効率的な検査工程を実現することができる。
【0052】
また、例えば作業者毎にメモリーカードを持たせるようにすると、自分の好みに応じたリターディション調整を記憶するといった使い方も可能になる。
したがって、検査工程がより一層自動化され、製造工程における検査時間の短縮、品質の安定・向上の改善を行うことができる。
(第5の実施の形態)
図8は、本発明の第5の実施の形態が適用される微分干渉観察機能を有する光学顕微鏡の光学系の概略構成を示すもので、上述した図1と同一部分には、同符号を付し、その説明を省略する。
【0053】
この光学顕微鏡においては、微分干渉観察光学系と、各アクチュエータ11,12,17,モータ16,各駆動部13,14,19及びモータ制御部20等の機構部分は、第1の実施の形態の場合と同様に構成されている。
【0054】
本実施の形態においては、制御部として制御コンピュータ24を使用している。リターディション調整位置の記録は、コンピュータ24に内蔵されたハードディスク等のメモリー241に対して行われる。
【0055】
ポラライザ3等のセットやリターディション調整等の操作手段としては、コンピュータ24の入力装置であるキーボード242をそのまま用いることができる他、第3の実施の形態の操作部22aと同様な操作部25が設けられコンピュータ24に接続されている。なお、操作部25には、選択スイッチ251と、リターディション調整スイッチ252と、記憶スイッチ253と、終了スイッチ254とが設けられ、それぞれ図6の操作部22aにおける選択スイッチ221aと、リターディション調整スイッチ222と、記憶スイッチ223と、終了スイッチ224とに対応している。
【0056】
また、コンピュータ24に内蔵している大容量のメモリー241を用いれば、第4実施の実施の形態と同様に記憶する種類を増やせたり、分類することが可能である。
【0057】
さらに、光学顕微鏡の光学系に対する制御情報(観察情報)を用いれば、選択スイッチ251のスイッチ数を減らすことが可能である。つまり、制御コンピュータ24は、顕微鏡本体に対する対物レンズの倍率変更、オートフォーカス(A/F)制御、ステージ移動、光路切り換え等の制御をも行っており、これらの情報は、操作部25からの操作入力でなく、制御コンピュータ24が保持する制御情報をそのまま使用する。
【0058】
このようにすれば、選択スイッチ251に倍率選択に関するスイッチが不要となる。したがって、本実施の形態では、操作部25の選択スイッチ251には標本選択あるいは工程選択に関するスイッチだけが設けられている。
【0059】
なお、キーボード242から検査対象を特定する場合には、ID番号等をキーボード242より入力することにより行う。
以上は、光学顕微鏡のシステムのみで使用する場合の構成であるが、本実施の形態の光学顕微鏡は、さらに上位の製造工程管理コンピュータ27に接続されている。
【0060】
すなわち、最近の半導体ウエハや液晶基板の製造工場では、CIMとよばれる自動化が進んでいるが、本実施の形態では、このCIMを実施し、製造工程を管理する製造工程管理コンピュータ27が制御コンピュータ24と通信回線で接続されている。
【0061】
これにより検査しようとしている標本の情報まですべて自動で制御コンピュータ24を入力できる。微分干渉観察時のリターディション調整位置は、操作部25の操作やキーボード242の入力を介することなくすべて自動でセットできることとなる。
【0062】
具体的には製造工程管理コンピュータ27に、作業者標本や検査レシピのテーブルが設けられ、これらのテーブル情報の選択により制御コンピュータ24への情報が入力される。
【0063】
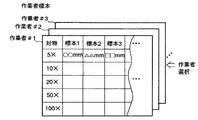
図9は本実施の形態の製造工程管理コンピュータに保存される作業者標本テーブルの例を示す図である。
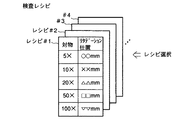
図10は本実施の形態の製造工程管理コンピュータに保存される検査レシピテーブルの例を示す図である。
【0064】
図9及び図10に示す情報はリターディション調整位置を示している。製造工程管理コンピュータ27は、製造計画等に基づき作業者標本テーブルもしくは検査レシピテーブルから、作業者もしくはレシピを自動選択し、その情報を制御コンピュータ24に送出する。
【0065】
制御コンピュータ24は、製造工程管理コンピュータ27からの情報に基づき、微分干渉観察時のリターディション調整位置等を行う。
しかして、このような構成により、第3又は第4の実施の形態と同様な作用効果が得られる他、制御にコンピュータ24を利用しまた製造工程管理コンピュータ27も用いることで、より一層の自動化と、製造工程における検査時間の短縮、品質の安定・向上の改善を行うことができる。
【0066】
なお、本発明は、上記各実施の形態に限定されるものでなく、その要旨を逸脱しない範囲で種々に変形することが可能である。
また、実施の形態に記載した手法は、計算機に実行させることができるプログラムとして、例えば磁気ディスク(フロッピーディスク、ハードディスク等)、光ディスク(CD−ROM、DVD等)、半導体メモリ等の記憶媒体に格納し、また通信媒体により伝送して頒布することもできる。本装置を実現する計算機は、記憶媒体に記録されたプログラムを読み込み、このプログラムによって動作が制御されることにより上述した処理を実行する。
【0067】
以上、本発明について実施の形態に基づいて説明してきたが、本発明は以下の発明も含む。
(1) 前記ノマルスキープリズムは、プリズム取付けブロックに直線方向に移動可能に設けられ、
前記第2の駆動手段は、前記プリズム取付けブロックに設けられた駆動モータと、この駆動モータに設けられたネジ部と、このネジ部が螺装され前記ノマルスキープリズム側に設けられたナット部を有し、
前記駆動モータの回転によるネジ部の前記ナット部への螺進量により前記ノマルスキープリズムの前記光路に対する挿脱とリターディション調整を行うことを特徴とする請求項1乃至3のうち何れか1項記載の光学顕微鏡。
【0068】
上記(1)の作用効果を説明する。
この発明によれば、ノマルスキープリズムを光軸上に挿入するための動作と、光軸と直角方向の微小移動によるリターディション調整を共通の駆動モータの動作により実現できるので、駆動手段の構成を簡単なものにできる。
【0069】
【発明の効果】
以上述べたように、本発明によれば、微分干渉観察光学系を構成するポラライザおよびアナライザを始め、ノマルスキープリズムを、制御手段により駆動制御される第1および第2の駆動手段により、光学系の光路に対して自動的に挿脱でき、さらにノマルスキープリズムについて、リターディション調整をも行うようにできるので、従来のパーティクルが原因する製品の品質低下を回避できるとともに、これらポラライザ、アナライザ、ノマルスキープリズムを光路に挿入する作業時間も、リターディション調整を含めても短縮でき、製品の検査時間を大幅に縮めることができる。
【0070】
また、ノマルスキープリズムのリターディション調整後の位置データを記憶していて、これ以降のリターディション調整の際に利用できるので、繰り返してリターディション調整位置を再現することができる。また、その位置データを複数種類記憶し、選択できるようにしたので、より効率的にリターディション調整位置を再現することができ、作業者に起因するばらつきを押さえることができる。
【0071】
さらに、ノマルスキープリズムを光軸上に挿入するための動作と、光軸と直角方向の微小移動によるリターディション調整を共通の駆動モータの動作により実現できるので、駆動手段の構成を簡単なものにできる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態が適用される微分干渉観察機能を有する光学顕微鏡の光学系の概略構成を示す図。
【図2】第1の実施の形態に用いられるアクチュエータの概略構成を示す図。
【図3】第1の実施の形態に用いられるノマルスキープリズムの支持構造の概略構成を示す図。
【図4】本発明の第2の実施の形態に用いられるノマルスキープリズムの支持構造の概略構成を示す図。
【図5】第2の実施の形態に用いられるノマルスキープリズムの支持構造の動作を説明するための図。
【図6】本発明の第3の実施の形態が適用される微分干渉観察機能を有する光学顕微鏡の光学系の概略構成を示す図。
【図7】本発明の第4の実施の形態が適用される微分干渉観察機能を有する光学顕微鏡の光学系の概略構成を示す図。
【図8】本発明の第5の実施の形態が適用される微分干渉観察機能を有する光学顕微鏡の光学系の概略構成を示す図。
【図9】同実施の形態の製造工程管理コンピュータに保存される作業者標本テーブルの例を示す図。
【図10】同実施の形態の製造工程管理コンピュータに保存される検査レシピテーブルの例を示す図。
【図11】一般の微分干渉観察光学系の概略構成を示す図。
【符号の説明】
1…照明用光源、
2…コレクタレンズ、
3…ポラライザ、
4…ハーフミラー、
5…ノマルスキープリズム、
51…枠体、
6…対物レンズ、
7…標本、
8…アナライザ、
11、12…アクチュエータ、
111、121…シリンダ本体、
112、122…シリンダ軸、
13、14…駆動部、
15…制御部、
16…電動モータ、
161…ステッピングモータ、
162…回転軸、
163…ネジ部、
17…アクチュエータ、
171…シリンダ本体、
172…シリンダ軸、
18…プリズム取付けブロック、
19…駆動部、
20…モータ制御部、
21…メモリ、
22…キー入力部、
22a…操作部、
221,221a…選択スイッチ、
222…リターディション調整スイッチ、
223…記憶スイッチ、
224…終了スイッチ、
23…メモリーカード、
24…制御コンピュータ、
241…メモリー、
242…キーボード、
25…操作部、
251…選択スイッチ、
252…リターディション調整スイッチ、
253…記憶スイッチ、
254…終了スイッチ、
27…製造工程管理コンピュータ、
31…プリズム取付けブロック、
32…ステッピングモータ、
321…回転軸、
322…ネジ部。
Claims (4)
- 微分干渉観察機能を有する光学顕微鏡において、
微分干渉光学系を構成するポラライザおよびアナライザを前記光学顕微鏡の光路に対して挿脱する第1の駆動手段と、
前記微分干渉光学系を構成するノマルスキープリズムを前記光学顕微鏡の前記光路に対して挿脱するとともに、該ノマルスキープリズムを前記光路の光軸に直角方向に移動させてリターディション調整を行う第2の駆動手段と、
観察対象の種類ごとに前記リターディション調整の位置データを記憶する記憶手段と、
前記記憶手段に記憶された前記位置データを元に前記第2の駆動手段を制御して前記ノマルスキープリズムを前記光路の光軸に直角方向に移動制御する制御手段と、
を具備したことを特徴とする光学顕微鏡。 - 前記第2の駆動手段は、前記ノマルスキープリズムを直線方向に移動可能に設けたブロックと、該ブロックに設けたナット部と、該ナット部に螺装されるネジ部を介して設けられた電動モータとを有し、
前記制御手段は、前記電動モータを駆動制御して前記ノマルスキープリズムを前記光路に対して挿脱するとともに、前記記憶手段に記憶された前記位置データを元に前記ノマルスキープリズムを微小移動させて前記リターディション調整を行うことを特徴とする請求項1記載の光学顕微鏡。 - 前記制御手段は、前記電動モータを回転させることにより前記ノマルスキープリズムの螺進量を調整して前記リターディション調整を行った後、該リターディション調整後の前記位置データを前記記憶手段に記憶することを特徴とする請求項2記載の光学顕微鏡。
- 前記制御手段は、前記観察対象の種類ごとに前記リターディション調整を行なわせるリターディション調整スイッチと、該リターディション調整スイッチで調整された前記ノマルスキープリズムの前記位置データを前記記憶手段に記憶させる記憶スイッチと、前記観察対象の種類を選択する選択スイッチとを有し、前記選択スイッチにより選択された前記観察対象に該当する前記記憶手段に記憶された前記位置データを元に前記第2の駆動手段を制御して前記ノマルスキープリズムの前記リターディション調整を行うことを特徴とする請求項1記載の光学顕微鏡。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP02895697A JP3816619B2 (ja) | 1996-04-03 | 1997-02-13 | 光学顕微鏡 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP8-81560 | 1996-04-03 | ||
| JP8156096 | 1996-04-03 | ||
| JP02895697A JP3816619B2 (ja) | 1996-04-03 | 1997-02-13 | 光学顕微鏡 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH09325281A JPH09325281A (ja) | 1997-12-16 |
| JP3816619B2 true JP3816619B2 (ja) | 2006-08-30 |
Family
ID=26367106
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP02895697A Expired - Fee Related JP3816619B2 (ja) | 1996-04-03 | 1997-02-13 | 光学顕微鏡 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3816619B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4493115B2 (ja) * | 1998-03-17 | 2010-06-30 | オリンパス株式会社 | 光学素子切り換え装置及びその装置を搭載する光学顕微鏡 |
| US20030161038A1 (en) * | 2000-06-14 | 2003-08-28 | Helmut Tobben | Microscope and method for measuring surface topography in a quantitative and optical manner |
| JP2002131653A (ja) * | 2000-10-26 | 2002-05-09 | Nikon Corp | 顕微鏡 |
| KR20030054591A (ko) * | 2001-12-26 | 2003-07-02 | 엘지이노텍 주식회사 | 디지털 신호 처리방법 |
| JP4636433B2 (ja) * | 2005-02-17 | 2011-02-23 | 株式会社島津製作所 | 顕微鏡 |
| JP4918405B2 (ja) * | 2007-05-15 | 2012-04-18 | オリンパス株式会社 | 光学顕微鏡 |
| JP5904737B2 (ja) * | 2011-09-27 | 2016-04-20 | オリンパス株式会社 | 顕微鏡システム |
| JP6141067B2 (ja) * | 2013-03-27 | 2017-06-07 | オリンパス株式会社 | 顕微鏡 |
| JP7118346B2 (ja) * | 2018-06-19 | 2022-08-16 | 株式会社エビデント | 拡大観察装置、拡大観察装置の制御方法、及び拡大観察装置の制御プログラム |
-
1997
- 1997-02-13 JP JP02895697A patent/JP3816619B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH09325281A (ja) | 1997-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3816619B2 (ja) | 光学顕微鏡 | |
| US5260825A (en) | Microscope | |
| US8106943B2 (en) | Microscope image pickup system, microscope image pickup method and recording medium | |
| US6323995B1 (en) | Optical element switching device and optical microscope loaded with the device | |
| EP3729163B1 (en) | Real time controller switching | |
| IL227473A (en) | System and method for compact microscopy | |
| EP0996863A1 (de) | Anordnung zur direkten steuerung der bewegung eines zoomsystems in einem stereomikroskop | |
| JP4076249B2 (ja) | 自動焦点顕微鏡 | |
| JPH1096848A (ja) | 自動焦点検出装置 | |
| JP4493115B2 (ja) | 光学素子切り換え装置及びその装置を搭載する光学顕微鏡 | |
| JPH1184253A (ja) | 電動顕微鏡 | |
| JPH1130753A (ja) | 光学顕微鏡 | |
| JP2891739B2 (ja) | 顕微鏡 | |
| WO2024015673A1 (en) | Autofocus system and method | |
| JP4918405B2 (ja) | 光学顕微鏡 | |
| JPH10227969A (ja) | 対物レンズの切換え装置 | |
| JP2001091835A (ja) | 光学顕微鏡装置 | |
| JP2919017B2 (ja) | 顕微鏡 | |
| JP2002277745A (ja) | 顕微鏡装置 | |
| JPH10221611A (ja) | 顕微鏡の焦準装置 | |
| JP5155673B2 (ja) | 顕微鏡システム | |
| JPH07333507A (ja) | 顕微鏡システム | |
| JPH05142121A (ja) | マーキング装置 | |
| Turner et al. | Light Microscopy Image Collection: Confocal, Widefield and Deconvolution | |
| JPH10161038A (ja) | 顕微鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040212 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060221 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060424 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060530 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060608 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090616 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100616 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110616 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120616 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120616 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130616 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |