JP3789730B2 - ミラー信号検出方法 - Google Patents
ミラー信号検出方法 Download PDFInfo
- Publication number
- JP3789730B2 JP3789730B2 JP2000169406A JP2000169406A JP3789730B2 JP 3789730 B2 JP3789730 B2 JP 3789730B2 JP 2000169406 A JP2000169406 A JP 2000169406A JP 2000169406 A JP2000169406 A JP 2000169406A JP 3789730 B2 JP3789730 B2 JP 3789730B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- control
- tracking
- tracks
- mirror
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Landscapes
- Optical Recording Or Reproduction (AREA)
- Moving Of Head For Track Selection And Changing (AREA)
- Moving Of The Head For Recording And Reproducing By Optical Means (AREA)
Description
【発明の属する技術分野】
本発明は、光学式ピックアップから照射される光ビームがディスクに設けられているピット上にない場合に得られるミラー信号を検出する方法に関する。
【0002】
【従来の技術】
デジタル信号により音楽等の情報データが記録されているとともに線速度一定にて回転駆動されるディスクに記録されている信号を光学式ピックアップを用いて読み出すことによって再生動作を行うディスクプレーヤーが普及しているが、斯かるディスクプレーヤーの代表的なものとして、CDプレーヤーが知られている。
【0003】
光学式ピックアップを用いてディスクに記録されている信号の再生動作を行うように構成されたディスクプレーヤーにおいては、周知のように光学式ピックアップより投射される光ビームをディスクの信号トラックに追従させてトレースさせるトラッキング制御動作を行うために、該光ビームのトレース位置と信号トラックとの誤差量を検出し、その誤差量を示す信号であるトラッキングエラー信号に応じて光学式ピックアップの対物レンズをディスクの径方向に駆動させるトラッキングサーボ回路が設けられている。
【0004】
ディスクプレーヤーに使用されているトラッキングサーボ回路としては、3ビーム法と呼ばれる方式が主流になっている。斯かる3ビーム法は、周知のように信号の読み取り動作を行うメインビームの前後に形成された2つのサブビームの反射光をそれぞれ受光する2つの光検出器の各受光領域からそれぞれ得られる受光出力の差を検出することによりトラッキングエラー信号を得るように構成されている。
【0005】
ディスクプレーヤーにおいては、ディスクに記録されている位置情報データを利用して所望の情報が記録されている位置を探し出して再生動作を開始するサーチと呼ばれる機能を備えている。斯かるサーチ動作を急速に行う技術が種々開発されているが、光学式ピックアップの移動時に光ビームが横切るトラック数をカウントする方式が多く採用されている。
【0006】
【発明が解決しようとする課題】
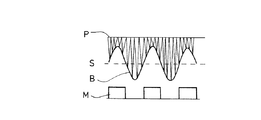
サーチ動作時に光ビームが横切るトラック数のカウント動作は、トラック間、即ちピットがない部分より得られる信号であるミラー信号を検出することによって行うようにしたものがある。図3は、従来一般に行われているミラー信号の検出方法を説明するための図であり、光学式ピックアップをディスクの径方向へ移動させた場合に光学式ピックアップより得られるRF信号のレベル変化を示している。
【0007】
同図において、Pはピークホールド信号、Bはボトムホールド信号を示しており、ボトムホールド信号は、図示したように変化する。また、同図において、Sは、ミラー信号を検出するために設定されている検出レベルであり、通常は、前記ピークホールド信号のレベルに0.3〜0.5の定数を掛けた値に設定されている。このようにミラー信号を検出するたの検出レベルSが設定される結果、そのレベルSを越えた期間、H(高い)レベルのミラー信号Mが出力されることになる。
【0008】
しかしながら、ピークホールド信号Pとボトムホールド信号Bとの間のレベル差は、ディスクの種類や光学式ピックアップの特性によって大きく変化するため、検出レベルSを正確に設定しなければ正確にミラー信号を検出することが出来ないという問題がある。
【0009】
本発明は、斯かる問題を解決したミラー信号の検出方法を提供しようとするものである。
【0010】
【課題を解決するための手段】
本発明は、光学式ピックアップより得られるRF信号のボトムレベルを検出するとともに該ボトムレベルが基準値VSより高いことによってミラー信号を検出する方法であり、ボトムレベルの最大値をVH、ボトムレベルの最小値をVLとしたとき、VS={(VH−VL)×定数K}+VLにて基準値VSを設定するようにしたものである。
【0011】
【実施例】
図1は、本発明のミラー信号検出方法を説明するための回路図、図2は本発明のミラー信号検出方法を説明するための信号波形図である。
【0012】
図1において、1は光ビームを用いてディスクに記録されている信号の再生動作を行う光学式ピックアップを構成する光検出部であり、周知の3ビーム法によってトラッキング制御動作が行われるように構成されている。2及び3は前記光検出部1内に組み込まれている第1光検出器及び第2光検出器であり、ディスクより反射される2つのサブビームの中の一方を各々受け、その光量に応じた電気信号を出力するように構成されている。
【0013】
4は前記第1光検出器2より得られる検出信号を増幅する第1増幅回路、5は前記第2光検出器3より得られる検出信号を増幅する第2増幅回路、6は前記第1増幅回路4より増幅されて出力される検出信号が+側入力端子に入力されるとともに前記第2増幅回路5より増幅されて出力される検出信号が−側入力端子に入力される比較回路であり、前記第1光検出器2より得られる検出信号と第2光検出器3より得られる検出信号との差をトラッキングエラー信号として出力するように構成されている。
【0014】
7は前記比較回路6より出力されるトラッキングエラー信号の位相を反転させるインバータ、8は制御端子8cに印加される信号によって切換動作が制御される制御スイッチであり、前記比較回路6の出力端子に接続されている第1固定端子8a、前記インバータ7の出力端子に接続されている第2固定端子8b及び可動端子8dを備えている。9は光学式ピックアップのフォーカス制御動作及びトラッキング制御動作を行うピックアップ制御回路であり、前記制御スイッチ8を介して入力されるトラッキングエラー信号に基づいてトラッキング制御動作を行うトラッキングサーボ回路が組み込まれている。
【0015】
10は前記ピックアップ制御回路9等の動作を制御する制御回路であり、前記制御スイッチ8の制御端子8cに接続されている制御信号出力端子10a及び前記制御スイッチ8の可動端子8dに接続されているトラッキングエラー信号入力端子10b等が設けられている。11はディスクを回転駆動するスピンドルモーターの回転制御動作を行うスピンドルモーター制御回路であり、前記制御回路10によって制御されるように構成されている。
【0016】
斯かる回路構成において、通常の再生動作を行っている場合には、制御回路10に設けられている制御信号出力端子10aには、L(低い)レベルの信号が出力されており、制御スイッチ8は図示した状態にある。従って、ピックアップ制御回路9に組み込まれているトラッキングサーボ回路には、前記比較回路6より出力されるトラッキングエラー信号が入力される状態にあり、ディスクに設けられている信号トラックを追従する制御動作を行う状態にある。また、通常の再生動作を行う状態にあるとき、スピンドルモーター制御回路11によるスピンドルモーターの制御動作は、ディスクより再生される同期信号を利用して線速度が一定になるように行うように構成されている。
【0017】
そして、ミラー信号の検出動作を行うための基準レベルを設定するための動作を行う場合には、制御回路10に設けられている制御信号出力端子10aにHレベルの信号が出力され、制御スイッチ8が図示した状態の反対側に切り換えられるように構成されている。前記制御スイッチ8が図示した状態の反対側に切り換えられると、ピックアップ制御回路9に組み込まれているトラッキングサーボ回路には、前記比較回路6より出力されるトラッキングエラー信号の位相を反転させた信号が入力される状態になる。斯かる位相が反転されたトラッキングエラー信号がトラッキングサーボ回路のトラッキングサーボ動作を行うために使用されると、斯かるトラッキングサーボ動作はディスクに設けられている信号トラックと信号トラックとの間、即ち信号が記録されていないトラック間を追従する制御動作を行う状態になる。そして、斯かる動作を行う状態にあるときは、ディスクの信号トラックに記録されている同期信号の検出動作を行うことが出来ないので、ディスクを線速度一定になるように制御することは出来ない。従って、本発明では、スピンドルモーター制御回路11によるスピンドルモーターの制御動作は、ディスクの回転速度を角速度が一定になるように制御するように構成されている。
【0018】
以上の如く、本発明に係る装置は構成されており、次に斯かる装置の動作について説明する。通常の再生動作を行う状態にあるときには、制御スイッチ8は図示した状態にあり、ピックアップ制御回路9に組み込まれているトラッキングサーボ回路には、前記比較回路6より出力されるトラッキングエラー信号が入力される状態にあり、ディスクに設けられている信号トラックを追従する制御動作を行う状態にある。
【0019】
図2の(A)は、比較回路6より出力されるトラッキングエラー信号であり、ディスクに記録されている信号のトラックを追従する状態にある。図2の(B)は、信号トラックより読み出されるピットの信号であり、トラッキングエラー信号の右下がり部分のゼロクロス点が中心になるように制御される。また、斯かる制御動作が行われることによって、信号トラックより信号の再生動作が行われるため、ディスクに記録されている同期信号の検出動作が行われることになり、その結果、検出される同期信号を利用することによってディスクの回転を線速度一定になるように制御することが出来る。
【0020】
前述したように通常の再生動作時の制御動作は行われるが、次にミラー信号を検出するための基準値VSを設定するための動作について説明する。図2の(D)は、光学式ピックアップをディスクの径方向へ移動させた場合に該ピックアップより得られるRF信号のレベル変化を示すものであり、VHはボトムレベルの最大値、VLはボトムレベルの最小値である。
【0021】
まず、ボトムレベルの最小値であるVLの検出動作について説明する。斯かる最小値VLは、通常の再生動作状態、即ちディスクに記録されている信号のトラックの追従動作を行っている場合に得られるRF信号の最小値を検出することによって検出することが出来る。斯かる値の検出動作は、RF信号の最小信号のレベルを保持することによって得られる信号、即ちボトムホールド信号のレベルを検出することによって行うことが出来るが、検出するための回路は周知の回路を使用すれば良い。
【0022】
以上に説明したようにボトムレベルの最小値VLの検出動作行われるが、次にボトムレベルの最大値VHの検出動作について説明する。斯かる最大値VHの検出動作は、ディスクに設けられている信号トラックと信号トラックとの間、即ちトラック間より得られる信号に基づいて行われる。斯かる動作は、制御回路10に設けられている制御信号出力端子10aにHレベルの制御信号を出力し、制御スイッチ8を図示した状態の反対側に切り換えるとともにスピンドルモーター制御回路11によるスピンドルモーターの制御動作を線速度一定制御動作から角速度一定制御動作を行う状態へ切換えることによって行われる。
【0023】
前記制御スイッチ8が図示した状態の反対側に切り換えられると、ピックアップ制御回路9に組み込まれているトラッキングサーボ回路には、前記比較回路6より出力されるトラッキングエラー信号の位相を反転させた信号が入力される状態になる。図2の(C)は、前記比較回路6より出力されるトラッキングエラー信号の位相を反転させた信号を示すものであり、斯かる信号に基づいてトラッキング制御動作が行われる結果、光学式ピックアップより照射されるメインビームのトレース位置をトラック間に保持するための制御動作が行われる。また、スピンドルモーター制御回路11によるスピンドルモーターの角速度一定制御動作が行われた状態になる。
【0024】
斯かる状態において、ディスクより得られるRF信号は、トラック間、即ちピットが形成されていない部分より得られる信号になるため、ボトムホールド信号のレベルは大きく変化することはない。従って、この状態におけるボトムホールド信号のレベルはほぼ一定となり、このレベルを検出することによってボトムレベルの最大値VHを検出することが出来る。
【0025】
以上に説明したようにボトムレベルの最大値VH及びボトムレベルの最小値VLの検出動作は行われるが、次にミラー信号の検出方法について説明する。斯かるミラー信号の検出動作は、基準値VSを設定し、この基準値VSよりRF信号のボトムレベルが高いことを検出することによって行うことが出来る。
【0026】
そして、前記基準値VSは、VS={(VH−VL)×定数K}+VLにて求めることが出来る。定数Kの値は、0.5程度に設定される。図2の(D)に示すように基準値VSは、ボトムレベルの最大値VHとボトムレベルの最小値VLとの間に設定され、図2の(E)に示すミラー信号が検出されることになる。このようにして基準値VSを設定することによってミラー信号の検出動作を正確に行うことが出来る。
【0027】
前述した動作によってミラー信号を検出するための基準値の設定動作は行われるが、斯かる設定動作をディスクがディスクプレーヤーに装着されたときに行うようにすればその後に行われるサーチ動作を効率良く、且つ正確に行うことが出来る。
【0028】
【発明の効果】
本発明は、光学式ピックアップより得られるRF信号のボトムレベルが基準値VSより高いことを検出することによってピットが形成されていない部分であるトラック間から得られるミラー信号を検出する方法であり、ボトムレベルの最大値をVH、ボトムレベルの最小値をVLとしたとき、VS=(VH−VL)×定数K+VLにて前記基準値VSを設定するとともに光学式ピックアップのトラッキング動作を制御するトラッキングサーボに使用されるトラッキングエラー信号の位相を反転させることによってトラック間に対するトラッキング制御動作を行い、トラック間のトレース動作を行っている状態にて得られるRF信号から前記VH値を検出するようにしたので、ミラー信号を検出するための基準値を最適な値に設定することが出来、それ故ミラー信号の検出動作を正確に行うことが出来る。
【0030】
そして、本発明は、光学式ピックアップのトラッキング動作を制御するトラッキングサーボに使用されるトラッキングエラー信号の位相を反転させることによってトラック間に対するトラッキング制御動作を行い、トラック間のトレース動作を行っている状態にて得られるRF信号から前記VH値を検出するようにしたので、即ち信号トラックに対するトラッキング制御動作からトラック間のトレース動作を行うトラッキング制御動作をを行う状態への切換動作をトラッキングエラー信号の位相を反転させることによって行うようにしたので、回路構成が簡単になるという利点を有している。
【0031】
また、本発明は、トラック間のトレース動作時ディスクの回転速度が一定になるように制御するようにしたので、スピンドルモーターの回転制御動作が不安定になることを防止することが出来る。
【図面の簡単な説明】
【図1】本発明のミラー信号検出方法を説明するための回路図である。
【図2】本発明のミラー信号検出方法を説明するための信号波形図である。
【図3】従来のミラー信号検出方法を説明するための信号波形図である。
【符号の説明】
1 光検出部
2 第1光検出器
3 第2光検出器
6 比較回路
7 インバータ
8 制御スイッチ
9 ピックアップ制御回路
10 制御回路
Claims (2)
- 光学式ピックアップより得られるRF信号のボトムレベルが基準値VSより高いことを検出することによってピットが形成されていない部分であるトラック間から得られるミラー信号を検出する方法であり、ボトムレベルの最大値をVH、ボトムレベルの最小値をVLとしたとき、VS=(VH−VL)×定数K+VLにて前記基準値VSを設定するとともに光学式ピックアップのトラッキング動作を制御するトラッキングサーボに使用されるトラッキングエラー信号の位相を反転させることによってトラック間に対するトラッキング制御動作を行い、トラック間のトレース動作を行っている状態にて得られるRF信号から前記VH値を検出するようにしたことを特徴とするミラー信号検出方法。
- トラック間のトレース動作を行っているとき、ディスクの回転速度が一定になるように制御するようにしたことを特徴とする請求項1に記載のミラー信号検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000169406A JP3789730B2 (ja) | 2000-06-06 | 2000-06-06 | ミラー信号検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000169406A JP3789730B2 (ja) | 2000-06-06 | 2000-06-06 | ミラー信号検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001351253A JP2001351253A (ja) | 2001-12-21 |
| JP3789730B2 true JP3789730B2 (ja) | 2006-06-28 |
Family
ID=18672273
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000169406A Expired - Fee Related JP3789730B2 (ja) | 2000-06-06 | 2000-06-06 | ミラー信号検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3789730B2 (ja) |
-
2000
- 2000-06-06 JP JP2000169406A patent/JP3789730B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001351253A (ja) | 2001-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100298929B1 (ko) | 정보기록/재생방법및장치 | |
| JP2816142B2 (ja) | 光ディスクシステムにおけるディスク自動判別方法及び装置 | |
| JP2002150574A (ja) | 光ディスク装置 | |
| US7315491B2 (en) | Disk driving apparatus and information readout method with selective servo control for read-out destinations of lands and grooves | |
| US8068393B2 (en) | Optical disc apparatus including a divided photodetector | |
| JPH0954963A (ja) | 光ディスク装置とそのトラッキング制御回路とトラッキング位置の変更方法 | |
| JP2000285485A (ja) | 光ディスク記録再生装置 | |
| KR100477501B1 (ko) | 디스크드라이브장치 | |
| KR100768614B1 (ko) | 디스크 드라이브 장치 | |
| JP3789730B2 (ja) | ミラー信号検出方法 | |
| JP4690871B2 (ja) | 光ディスク記録・再生装置及びそのフォーカスサーボ制御方法 | |
| JPH0439154B2 (ja) | ||
| JP2828906B2 (ja) | 光ディスク記録再生装置 | |
| JPH0386935A (ja) | 光ディスクの記録読取方法 | |
| KR100332751B1 (ko) | 광자기디스크의재생방법 | |
| JPS6344327A (ja) | 光学的情報記録再生装置のトラツキング装置 | |
| JP2000011531A (ja) | ディスクプレーヤーの偏重心ディスク検知方法 | |
| JP3043245B2 (ja) | ディスクプレーヤーの再生制御方法 | |
| JPH1027355A (ja) | 記録媒体記録再生装置および記録媒体記録再生方法 | |
| JPH07220417A (ja) | ディスク装置 | |
| JPH1055606A (ja) | ディスクプレーヤーの偏重心ディスク検知方法 | |
| JPH1050011A (ja) | ディスク再生装置 | |
| JPH10334598A (ja) | ディスクプレーヤーの信号記録制御回路 | |
| JP2000030267A (ja) | ディスクプレーヤーのトラック飛び検出回路 | |
| JPH1173714A (ja) | ディスクプレーヤーの再生制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040405 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050909 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050920 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050929 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20051226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060307 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060329 |
|
| LAPS | Cancellation because of no payment of annual fees |