JP3770018B2 - ロータリ耕耘装置 - Google Patents
ロータリ耕耘装置 Download PDFInfo
- Publication number
- JP3770018B2 JP3770018B2 JP35039499A JP35039499A JP3770018B2 JP 3770018 B2 JP3770018 B2 JP 3770018B2 JP 35039499 A JP35039499 A JP 35039499A JP 35039499 A JP35039499 A JP 35039499A JP 3770018 B2 JP3770018 B2 JP 3770018B2
- Authority
- JP
- Japan
- Prior art keywords
- tilling
- claw
- shaft
- grass
- nail
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Soil Working Implements (AREA)
Description
【発明の属する技術分野】
この発明は、ロ−タリ耕耘軸の草巻付き防止装置に関する。この発明は、土壌表面を耕耘しながら走行し、地表面に植生する雑草や圃場上に散乱した作物の残滓を、耕耘と同時に耕耘土壌中に埋め込もうとする際に、耕耘軸廻りにこれらの雑草や残滓等を巻きつけず、耕耘土壌中に同時埋め込みしようとするものである。
【0002】
【従来の技術】
従来からロ−タリ耕耘機は、耕耘作業に伴って、圃場に残っている長稈の草類やイグサ等が耕耘爪の取付部や耕耘爪軸に巻き付くのを未然に防止する手段が考案され、実用化への試みがある。
【0003】
公知技術の一例を述べると、特開平10−150801号公報や特開平10−136706号公報で示すように、耕耘爪軸に配列して取り付けられている左右両端部の耕耘爪の間に、巻付き防止部材として線状部材を耕耘爪軸と平行に一本または二本に分けて張り渡した構成のものが公知である。
【0004】
そして、上記一本または二本の巻付き防止部材は、耕耘作業に際して耕耘爪軸から外方に隔たった爪ホルダー近傍程度の小径位置で、その耕耘爪軸の外周を平行を保って回転しながら巻き付こうとする草を排除して、巻き付きを防止する構成になっており、左右両端部の耕耘爪は巻付き防止部材よりも大きく外方に突出した大回転径で掘削を行なう構成としている。このような構成では、圃場表面に長い草藁等が散乱し、所定耕耘幅で走行中に隣の次回耕耘部側から草藁等の一部が今回の耕耘幅内にあると、長い草藁等を左右両端部の耕耘爪が引きずり込んで爪軸部に巻付き、巻きついた草藁等が大形化していく。
【0005】
草藁等が大形化すると、まず軸廻りのシールを傷めるため、公知例では草切りの回転板(刃体)や接近対応する筒体等の複雑な部材を取り付けているが、巻付き草藁が内部では切断されても、その外周に新たにどんどん草藁が巻きついていくので、回転抵抗が増え実際には数メートル走行毎に、掃除をしないと実用性が無い。
【0006】
また、ナタ爪式の耕耘爪も側方から見た先端後退角や、後方から見た爪先端の曲げ形状(曲げ半径)や爪基部の倒れ角度等により、単純なナタ爪では中間部の耕耘爪に草藁等が巻きつくものである。特に、休耕田に植生する背高あわだち草やすすき等の長稈雑草や、圃場表面に残るスイカやメロン等の蔓性の残稈や、収穫作業後に圃場に捨てた長藁やイグサ等の長茎を同時耕耘埋め込みする場合、耕耘爪の形状により巻付き防止効果には大きな差を生じる。
【0007】
さらに、圃場の一部に雑草や残滓や長い草藁や堆肥等を集積している場合、巻付き防止のためには、従来は人手により圃場に均等にばら散いた後耕耘しているが、集積物のばら散きは老人や婦女子には大変疲れる作業であった。
【0008】
【発明が解決しようとする課題】
このように、公知の上述した巻付き防止装置であっても、短い草では耕耘爪軸への草の巻付きはほとんど発生しないが、長い草藁等では耕耘爪軸の軸端から軸受部材側(伝動ケ−ス等)間への巻付きや、耕耘爪自体への巻付きが発生し、極端な場合には軸受部材のシール部から油漏れが起きるなどの課題がある。
【0009】
【課題を解決するための手段】
本発明は、上述した課題を解決するために、次の如き技術手段を講ずるものである。即ち、複数の耕耘爪(1,1..)群を配列して取り付けた耕耘爪軸(2)のうち左右両端部の耕耘爪(1)を夫れ夫れ背面視で先端内向き爪とし、該耕耘爪軸(2)の一端側を伝動装置(3)を内装した伝動ケ−ス(4)で支持し、耕耘爪軸(2)の他端側を支持機枠(8)で回転自在に支持するサイドドライブ型のロータリ耕耘装置(20)において、該伝動ケ−ス(4)と前記耕耘爪軸端側の耕耘爪(1)との間、および支持機枠(8)と前記耕耘爪軸端側の耕耘爪(1)との間に位置して、耕耘爪(1,1..)群の掘削外径と同程度の外径とした回転板(5,5)を夫々上記耕耘爪軸(2)と一体的に回転すべく設け、回転板(5)は大径立壁(28)と深皿形状の小径立壁(25)とで構成し、該回転板(5)の略半分程度の直径の円周上に略90度の等配位置で、該左右の回転板(5,5)間を4本のロッド(32)で左右連結したことを特徴とするロータリ耕耘装置の構成とする。
【0010】
【0011】
【0012】
【0013】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて具体的に説明する。耕耘掘削作業中のサイドドライブロータリ耕耘装置20は、図2の側面図で示す上下方向位置として、移動農機であるトラクタ等の後部に三点リンク装置を介して吊持し、掘削作業を終えると移動農機の後部上方に吊り上げる形態としている。
【0014】
まず、上部伝動機枠6は、図1,図2に示すように、左右方向中央部に中央伝動ケース21を配設し、移動農機の後部PTO軸と接続する入力軸22に原動側の駆動力を伝動し、この駆動力を上部伝動機枠6に内装した伝動軸7に傘歯車23,24を介して伝えている。上部伝動機枠6の左右方向一方側に伝動ケ−ス4を連結し、他方側に支持機枠8を連結してそれぞれ垂下状態にして構成し、垂下下端部間に耕耘爪軸2を配設している。そして、伝動ケ−ス4には、図1に示すように、上部を前述した伝動軸7の上部スプロケット9に係合し、下部を駆動軸10に軸着した下部スプロケット11に掛け渡して内装した伝動チエン12との3者で構成した伝動装置3を内装した構成としている。また、駆動軸10の内端には取付フランジ14を設け、支持機枠8下端の支持軸16には、同じく内端に取付フランジ17を両者対向して設けている。
【0015】
そして、耕耘爪軸2の両端部に設けた左右の取付板13,13には、図1に示すように、介装板である回転板5の小径立壁25,25を外側から重ね合わせて取付板13,13に介装取り付けしている。この部分の駆動軸10側を図3で詳述する。耕耘爪軸2の両端部に溶接等で一体的に設けた取付板13,13は、図4の側面図で示すように、略長方形の外形状としており、四個所の突出隅部に孔を開けている。そして、回転板5は、バネ鋼から成り外径を耕耘爪1の回転軌跡と略同一とした平板状の大径立壁28と、深皿状で一般鋼材を絞り加工した小径立壁25とから成っており、小径立壁25の外周部を大径立壁28の側壁面に、溶接またはボルト等で取り付けて一体化している。また、大径立壁28と小径立壁25の中心部には、夫々大小径の中央開口29,27を設けている。
【0016】
図例では、大径立壁28を直径500mm程度の円板とし、中央に前述した大径中央開口29を設けている。また、図4で示す大径立壁28には、外周側開口43,43...と内周側開口44,44...が、略8等分配毎合計16個開口されており、大径立壁28の対地回転抵抗や摩擦発熱減少を図っている。さらに、小径立壁25には略円形の小径中央開口27と、その外周に取付孔26,26...を設けており、この取付孔26を前述した左右夫々の取付板13の長方形隅部の孔に、ボルト15,15...によって着脱自由に締め付け固着している。図5は、介装板である回転板5の側面図であり、26の取付孔にボルト15を通している。27は小径中央開口であって左右両端部の、取付フランジ14または17が通過可能としている。また、小径立壁25の取付孔26外周方には、夫々前後2個所づつ計8個の取付孔31,31..を開口しており、この取付孔31にロッド32の夫々の端部を取り付けている。取付孔31のどれに取り付けるかにより、ロッド32は耕耘爪軸2と平行状にまたは螺旋状に前進か後退角を有して取り付け調整可能としている。大径中央開口29は、該ロッド32端を覆うように内方まで延長しているが、ロッド32端のナット等を締め付ける時見やすいように、ロッド32の外方部を円弧状に少し切り欠いている。図例では、ロッド32の回転軌跡外径を250mm程度としており、回転板5の略半分程度の径位置にロッド32を配設している。
【0017】
耕耘爪軸2には、軸上に配列して設けた複数の爪ホルダ19に、夫々耕耘爪1,1..を取り付けてサイドドライブロータリ耕耘装置20を構成している。この耕耘幅方向の耕耘爪1,1...の取付ピッチを、図例に基づいて説明する。耕耘幅1,800mmのものでは、従来18等分19位置配列の爪ホルダー位置に対し、本発明実施例では、詳細は後述するが耕耘爪1のピッチ方向の寸法を一割程度大きくし、16等分17位置配列の爪ホルダーヘとピッチを粗くして爪ホルダー位置本数を幅方向位置を2箇所削減した。同様に1,700mm及び1,600mm耕耘幅のものを、従来の16等分17位置配列の爪ホルダー位置から、14等分15位置配列の爪ホルダー位置へとピッチを粗くして爪ホルダー位置本数を幅方向位置2箇所削減している。また、耕耘幅1,500mmのものも、従来14等分15位置配列の爪ホルダー位置から、12等分13位置配列の爪ホルダー位置へとピッチを粗くして、爪ホルダー位置本数を幅方向位置2箇所さらに爪を4本削減している。
【0018】
そして、これらの耕耘爪1を取り付ける爪ホルダー19,19..のうち、図1で示すように最外端両側部の爪ホルダー19aは、側面視で上下方向に一対2個設けられ、夫々の爪ホルダー19aに内向きに爪先端側を傾斜させた通常ナタ爪1aと残耕処理ナタ爪1bが取り付けられている。外端から2番目は、一個の爪ホルダー19bと内向きに爪先端側を傾斜させた通常ナタ爪1aが取り付けられている。また、外方から第3番目よりも内側以内の爪ホルダー19,19..が、上下または前後方向に向けた一対づつ配設され、夫々の爪ホルダー19,19に先端部が内向きのナタ爪と外向きのナタ爪を一対2本取り付けている。
【0019】
前述した爪ホルダー19をピッチ方向で2個所削減すると、耕耘爪1は一対2本×2個所で4本減すことができ回転時の掘削抵抗の減少や、爪ホルダー19,19間の間隔を広げたことによる、草藁,イグサ等の流れを良くしこれらの巻付き可能性も減ずることができる。
【0020】
回転板5は、一端最外側の耕耘爪1の外側と伝動ケ−ス4内側間、および、他端最外側の耕耘爪1の外側と支持部材8内側との間でこれらを隔離する構成としており、回転円板5を壁側である伝動ケ−ス4や支持部材8の内面側に最大でも15mm以下の間隙と成るように接近させて前述のように耕耘爪軸2の両端部に配設している。
【0021】
ロッド32は太さ10mm程度の丸棒鋼材であって、両端部にネジ部を設けており、回転板5の小径立壁25の外周近傍に設けた取付孔31に該ネジ部を挿入し、小径立壁25の内外面にナット33,33を介して固定しており、一方の小径立壁25に略90度等配位置に4本取り付けると共に、ロッド32の他端部を他方の小径立壁25にも略90度等配位置に取り付けている。
【0022】
耕耘爪軸2の上方には主カバー35が設けられ、該主カバー35の後部に設けた横方向の支軸36を中心として耕耘爪軸2の後方を覆うリヤカバー37の後端部が上下揺動自在に取り付けられている。通常作業時には、リヤカバー37は、45度程度に後端部を後方に傾斜して掘削走行しており、加圧バネ40を介したプッシュプルロッド41により、ある程度姿勢を保ちながら上下揺動可能としている。リヤカバー37の下端部は図2に示すように、円弧状の均し面37aとしており、その下端縁を延長する略水平方向に加圧面を持つ均平板18を取り付けている。均平板18には斜め下方に複数本のツース18aを櫛歯状に突設し、草藁,イグサ等の押し込み均平性を向上させる。
【0023】
本発明では、図2の側面図で示すように支軸36位置を従来のものよりも100mm程度後方に移動し、耕耘爪1の回転軌跡後端とリヤカバー37の前面間隔を広くして、耕耘爪1による草藁,イグサ等の持ち回りを防止しながら、掘削土壌と同時に草藁,イグサ等を後方の均平板18側に送りだしている。
【0024】
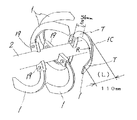
次に、耕耘爪1について、従来品と比較して説明する。図6,図7で示すものが本発明に関するもので、図8,図9で示すものが夫々対応する従来品である。耕耘爪軸2の軸心方向への爪の倒れ(掘削耕耘幅)が、従来の耕耘爪1Jでは図8で示すように95mmであり、本発明では110mmへと変更している。これで、基準の爪ホルダー19に対し隣の爪ホルダー19の間隔位置(ピッチ)を遠くすることが可能となり、耕耘幅全体を考えると爪ホルダー19の数を減すことができる。そして、従来の耕耘爪1Jが、図9で示すように、耕耘爪軸2の軸心Oに対する爪基部折り曲げ開始部までの直線部の長さSが70mmであったのを54mmと短くし、耕耘爪1の掘削刃面1Cに沿っての草藁,イグサ等の滑りを良くし、掘削時のその場反転性向上と爪軸空間の確保を行なった。42は爪取付孔であって、爪ホルダー19にボルト締めする際の孔であり、軸心Oから70mmの位置に設けている。また、従来の耕耘爪1Jは、図9実線で示すように、爪先端部を曲げ半径123.5mmとして前述した幅95mm方向へ略曲げRの部分で切り落としているのに対し、本発明の耕耘爪1は、図9仮想線及び図7で示すように、爪基部と先端部の直線部T,T間途中部を123.5mm半径のRでつないだ後、先端側に70mm程度の直線部を設け、これによって、爪先端部形状の曲がりをなだらかにし、草藁,イグサ等の滑りが良くなり、より巻き付き難くできた。耕耘爪軸2に対する耕耘爪1の掘削回転半径は245mmとし、爪ホルダー19の取付ボルト位置70mmの寸法は従来も本発明も変更していないが、爪単体側面図で示すように、本発明では掘削刃部1Cを全体的に掘削回転半径245mm側に近づけて草藁,イグサ等の流れを向上した。
【0025】
【実施例の作用及び効果】
ロータリ耕耘装置は、春秋の水田耕耘や、田植え前の代掻き、水田裏作の畝立て、さらに畠での耕耘と、年間を通じて広く利用され、日本の農家には必要不可欠の作業機である。そして、ロータリ耕耘装置には、駆動機構のレイアウトによりサイドドライブ式ロータリと、センタードライブ式ロータリがあり、現在サイドドライブ式ロータリが主流となっており、本発明は、このサイドドライブ式ロータリ耕耘装置20をイグサ収穫後の圃場の耕耘に使用するものである。
【0026】
イグサは、畳表の材料となる草である。生産地では、温暖な気候を利用した二毛作として生産している。即ち、イグサを6〜7月に収穫すると、数日後に耕耘し代掻きを行って田植えの準備をする。米の収穫は、10月〜11月初旬であり、両者の作業は非常に間隔の無いものである。
【0027】
イグサの収穫では、1.4m程度に成長したイグサのうち、長さが90cm以下のイグサは製品として使えないため、刈り取った直後に選別して圃場に捨てる。この捨てたイグサは「すりイグサ」や「くずイグサ」と呼ばれ、このようなくずイグサ散乱状態の圃場を、数日のうちに土壌耕耘し代掻きを行なうために通常の耕耘爪で掘削作業を行なうと、くずイグサがすぐに爪軸に巻きついて耕耘作業ができないものであった。
【0028】
ここで、本発明では、耕耘爪軸2の左右両端部に径大の介装板を一対取付け、左右介装板の中間外径部左右間に亘って4本のロッド32から成る長草案内押込装置を設け、耕耘爪1,1..による土壌掘削時に、耕耘爪1先端に引っ掛かって爪ホルダー19や耕耘爪軸2回りに絡みつこうとする草藁,イグサ等を長草案内押込装置により、土壌中に速やかに案内すると共に、所定耕耘幅外に散乱した草藁,イグサ等の本体途中部を、介装板の外周縁部で土壌表面から土壌中に押圧しながら前進するから、所定耕耘幅外の草藁,イグサを耕耘爪1が引きずり込むことなく走行でき、耕耘爪軸2の左右端部にムダな草藁等の巻付きを生じる恐れがない。例えば、介装板の直径を50cmとし、ロッド32の外周端の直径を25cmとすると、ロッド対角辺の長さが25cmであるからロッド全周囲で70cm程度以上あり、長さ90cm以下の草藁,イグサ等が耕耘爪1により長草案内押込装置廻りに引き込まれても、ロッド32部全周に一巻き程度であるから外れ易く掘削土壌内に埋め込み易い。
【0029】
耕耘爪1,1..群の爪配列は、図6の斜視図で示すように軸に対し爪ホルダー19,19を略180度反対向きに一対溶接している。そして、一対の爪ホルダー19,19に先端側が内向きの耕耘爪1と外向きの耕耘爪1が夫々取り付けられたものが、隣の爪ホルダー19溶接位置に対し螺旋延長状に略沿って配設されており、耕耘爪軸2の駆動回転時に一度に掘削抵抗がかからないように配慮されている。ここで、介装板である左右の回転板5,5に開口する取付孔31位置を、側面視でいずれか一方側を回転方向前側とし、4本のロッド32,32..を螺旋方向にねじって取り付けることにより、耕耘爪1の螺旋方向と長草案内押込装置のロッド32の螺旋方向を同方向にすることもできる。
【0030】
ロッド32は10mm程度の丸棒鋼材でありその長さを1,500mm〜1,800mmとし、図1で示すように爪ホルダー19先端よりも大径部を左右貫通しているので、取付時はしなりや変形を利用して耕耘爪1,1群の間をぬって略水平方向に配設することができる。さらに横向きのロッド32が、掘削土壌の表面近傍で図2の矢印「イ」方向に回転しているので、ロッド32の背面全体により上部土壌を後方に飛ばし、土壌表面の整地性を向上できると共に、耕耘爪1の掘削刃部1Cに、草藁,イグサ等を案内する途中中継とすることができる。そのうえ、前述したように、ロッド32方向と耕耘爪1の配列方向を螺旋方向にすると、掘削時に草藁,イグサ等の横移動が大きくなり、さらに草藁,イグサ等が巻付き難くて外れやすい構成となる。
【0031】
また、耕耘爪軸2の上方を主カバー35で覆い、該主カバー35の後部に設けた横方向の支軸36を中心として耕耘爪軸2の後方を覆うリヤカバー37を設けたもので、側面視で該支軸36の位置を、回転板5のロッド32取付孔31の何れの上方よりも後位置に設けた構成とすることにより、耕耘爪1の回転軌跡後端部とリヤカバー37の前面との間が広くなり、掘削土壌が持ち回りされずに後方移動するから、掘削走行中に同時に草藁,くずイグサ等も土壌中を後方移動し、耕耘爪1でイグサを外部に掻きだすことがなく、リヤカバー37とその下端後部の均平板18やツース18aにより高度の均平性を保てる。
【0032】
回転板5の大径立壁28を、バネ鋼で製作したので土接触による耐久性が向上した。そして、小径立壁25を深皿形状としたので、大径立壁28を伝動ケース4内面や支持機枠8内面間との間隙を小間隙にでき、駆動軸10の取付フランジ14外方廻りや、支持軸16の取付フランジ17廻りへの、イグサ等長草の進入を規制し回転部廻りの耐久性向上を図っている。
【0033】
以上のように構成された耕耘装置20は、機体側から伝動軸7に回転動力を伝動すると、耕耘爪軸2が、上部スプロケット9、伝動チエン12、下部スプロケット11、駆動軸10、取付フランジ14、取付板13、回転板5の順に伝動され、耕耘爪1を駆動して耕耘作業を開始する。作業速度は、1〜2Km/Hで、爪軸回転数は300〜350r.p.mの範囲で作業すると、草藁,イグサ等の埋め込み性が最良となる。
【0034】
そのとき、耕耘爪1,1..によりロータリ耕耘部の幅外に散乱した草や長い稈やイグサ等は、耕耘爪軸2側に引き寄せられるから、引き寄せ途中で草や長い稈やイグサ等は、伝動ケ−ス4側駆動軸10の取付フランジ14廻り、および支持機枠8側支持軸16の取付フランジ17廻りに侵入しようとする。しかし回転円板5,5により、圃場の掘削土壌表面から内方にロータリ耕耘部の幅外に散乱した草や長い稈やイグサ等は、実体部を表土に押圧されるから、その移動を規制されたり、押圧切断されるから、一部が耕耘爪軸2に無理矢理引かれて巻き付くことになったり、一部は短くなって幅外の地表に残ったり、一部は振り飛ばされるように離れたりする。
【0035】
このように、草や長い稈やイグサ等を回転円板5の外周端縁で押圧しているので、草や稈やイグサ等は耕耘爪1,1..に引っ張られて耕耘爪軸2中間部に巻き付こうとすることはあっても、4本のロッドから成る長草案内押込装置で振り飛ばされ、伝動ケ−ス4側および支持機枠8側の耕耘爪軸2取付端部に侵入することも、耕耘爪軸2に巻きつくこともない。
【0036】
以上のように、本発明は、耕耘爪軸2取付端部に草や稈やイグサ等の侵入がほとんどないから、従来のように、巻き付いた草のために伝動ケ−ス4や支持機枠8の軸受部分のシール30から油漏れまで発展する故障がない特徴を有する。
【0037】
【発明の効果】
本発明は、以上のように構成したものであるから、耕耘爪(1,1..)による土壌掘削時に、耕耘爪(1)先端に引っ掛かって爪ホルダー(19)や耕耘爪軸(2)に絡みつこうとする草藁,イグサ等をロッド(32)により、土壌中に速やかに案内すると共に、所定耕耘幅外に散乱した草藁,イグサ等の本体途中部を、回転板(5)の外周縁部で土壌表面から土壌中に押圧しながら前進するから、所定耕耘幅外の草藁,イグサを耕耘爪(1)が引きずり込むことなく走行でき、耕耘爪軸(2)の左右端部にムダな草藁等の巻付きを生じる恐れがない。もって、耕耘爪軸(2)に巻きつこうとする耕耘爪や耕耘爪軸及び耕耘軸端部分や軸受部材側(伝動ケースや支持部材)への草藁、イグサ等の巻付きを未然に防止できる効果を有するものである。
また、回転板(5)は、大径立壁(28)をバネ鋼で製作したので土接触による耐久性を向上し、小径立壁(25)を深皿形状としたので、大径立壁(28)を伝動ケース(4)内面や支持機枠(8)内周面との間隙を小間隙にでき、イグサ等長草の進入を規制できる。本発明は、以上のように構成したものであるから、耕耘爪や耕耘爪軸及び耕耘軸端部分や軸受部材側(伝動ケ−スや支持部材)への草藁,イグサ等の巻き付きを未然に防止できる効果を有するものである。
【図面の簡単な説明】
【図1】 本発明の実施例であって、一部破断した全体背面図である。
【図2】 本発明の実施例であって、全体側面図である。
【図3】 本発明の実施例であって、図1要部の拡大図である。
【図4】 本発明の実施例であって、要部部材の拡大側面図である。
【図5】 本発明の実施例であって、介装板の側面図である。
【図6】 本発明の実施例であって、耕耘爪軸の部分拡大斜視図である。
【図7】 本発明の実施例であって、耕耘爪の部品図である。
【図8】 従来耕耘装置の、耕耘爪軸の部分拡大斜視図である。
【図9】 従来耕耘装置の、耕耘爪の部品図である。
【符号の説明】
1 耕耘爪
1a 先端内向き爪
2 耕耘爪軸
3 伝動装置
4 伝動ケ−ス
5 回転板
8 支持機枠
18 均平板
19 爪ホルダー
19a 最外側の爪ホルダー
19b 外方二番目の爪ホルダー
20 サイドドライブロータリ耕耘装置
25 小径立壁
28 大径立壁
31 取付板
32 ロッド
35 主カバー
36 支軸
37 リヤカバー
Claims (1)
- 複数の耕耘爪(1,1..)群を配列して取り付けた耕耘爪軸(2)のうち左右両端部の耕耘爪(1)を夫れ夫れ背面視で先端内向き爪とし、該耕耘爪軸(2)の一端側を伝動装置(3)を内装した伝動ケ−ス(4)で支持し、耕耘爪軸(2)の他端側を支持機枠(8)で回転自在に支持するサイドドライブ型のロータリ耕耘装置(20)において、該伝動ケ−ス(4)と前記耕耘爪軸端側の耕耘爪(1)との間、および支持機枠(8)と前記耕耘爪軸端側の耕耘爪(1)との間に位置して、耕耘爪(1,1..)群の掘削外径と同程度の外径とした回転板(5,5)を夫々上記耕耘爪軸(2)と一体的に回転すべく設け、回転板(5)は大径立壁(28)と深皿形状の小径立壁(25)とで構成し、該回転板(5)の略半分程度の直径の円周上に略90度の等配位置で、該左右の回転板(5,5)間を4本のロッド(32)で左右連結したことを特徴とするロータリ耕耘装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP35039499A JP3770018B2 (ja) | 1999-12-09 | 1999-12-09 | ロータリ耕耘装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP35039499A JP3770018B2 (ja) | 1999-12-09 | 1999-12-09 | ロータリ耕耘装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001161106A JP2001161106A (ja) | 2001-06-19 |
| JP3770018B2 true JP3770018B2 (ja) | 2006-04-26 |
Family
ID=18410199
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP35039499A Expired - Fee Related JP3770018B2 (ja) | 1999-12-09 | 1999-12-09 | ロータリ耕耘装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3770018B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4801459B2 (ja) * | 2006-02-09 | 2011-10-26 | 小橋工業株式会社 | 耕耘爪 |
| JP4801460B2 (ja) * | 2006-02-16 | 2011-10-26 | 小橋工業株式会社 | 耕耘装置 |
| JP4970398B2 (ja) * | 2008-09-26 | 2012-07-04 | 小橋工業株式会社 | 耕耘爪 |
| JP2014033627A (ja) * | 2012-08-08 | 2014-02-24 | Matsuyama Plow Mfg Co Ltd | 農作業機 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57167602U (ja) * | 1981-04-17 | 1982-10-22 | ||
| JPS63196202A (ja) * | 1987-02-09 | 1988-08-15 | 井関農機株式会社 | 耕耘装置 |
| JPH08126403A (ja) * | 1994-10-31 | 1996-05-21 | Yanmar Agricult Equip Co Ltd | 耕耘ロータリ作業機 |
| JPH10150801A (ja) * | 1996-11-26 | 1998-06-09 | Mitsubishi Agricult Mach Co Ltd | ロータリ軸端部の巻付防止ガイド |
| JPH1146501A (ja) * | 1997-08-04 | 1999-02-23 | Iseki & Co Ltd | ロータリ耕耘装置 |
-
1999
- 1999-12-09 JP JP35039499A patent/JP3770018B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001161106A (ja) | 2001-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US4191259A (en) | Rotary cultivator and mulcher | |
| EP2418929B1 (en) | Reducing build up of crop residue on shanks | |
| US20070089888A1 (en) | Single pass plow | |
| US5224553A (en) | Bearing protector for a rotary hoe | |
| US5224552A (en) | Counter-rotating twin shaft system for gardening machines | |
| US4133390A (en) | Tine arrangements for garden tillers | |
| US4051902A (en) | Soil cultivating implements | |
| US5353881A (en) | Counter-rotating twin shaft system for gardening machines | |
| JP7142381B2 (ja) | まぐわを有する耕作装置 | |
| US6926091B2 (en) | Counter-rotating twin shaft system for gardening machines | |
| JP3770018B2 (ja) | ロータリ耕耘装置 | |
| AU743659B2 (en) | Feeder shaft structure for a cotton harvester | |
| HU200638B (en) | Agricultural tiller | |
| US3807152A (en) | Powered rotor for row crop harvesters and stripper bar therefor | |
| US20140196430A1 (en) | Implement for extraction and decimation of plant stalks | |
| JP2006197870A (ja) | 除草装置 | |
| JP3956041B2 (ja) | ロータリ耕耘装置の草巻付き防止装置 | |
| KR20100134846A (ko) | 이동작업차 전방에 장착되는 집초기 | |
| US20180352715A1 (en) | Attachable tilling device | |
| US4088196A (en) | Soil cultivating implements | |
| CN2341373Y (zh) | 一种前置割台玉米收获机 | |
| JP3924997B2 (ja) | ロータリ耕耘装置 | |
| US6286605B1 (en) | Cutting system | |
| KR100352742B1 (ko) | 로터리 경운장치의 풀류 감김 방지장치 | |
| US1795029A (en) | Power cotton chopper and tillage implement |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040330 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050624 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050802 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060117 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060130 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090217 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120217 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120217 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140217 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |