JP3737005B2 - 内燃機関用ノック制御装置 - Google Patents
内燃機関用ノック制御装置 Download PDFInfo
- Publication number
- JP3737005B2 JP3737005B2 JP35719599A JP35719599A JP3737005B2 JP 3737005 B2 JP3737005 B2 JP 3737005B2 JP 35719599 A JP35719599 A JP 35719599A JP 35719599 A JP35719599 A JP 35719599A JP 3737005 B2 JP3737005 B2 JP 3737005B2
- Authority
- JP
- Japan
- Prior art keywords
- knock
- cylinder group
- internal combustion
- combustion engine
- feedback control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Electrical Control Of Ignition Timing (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
【発明の属する技術分野】
本発明は、内燃機関の運転状態をノック判定に基づき制御する内燃機関用ノック制御装置に関するものである。
【0002】
【従来の技術】
従来、内燃機関で発生する振動信号波形から抽出したノック信号に対してノック判定を行い点火時期・燃料噴射量等のノック制御要因を制御する内燃機関用ノック制御装置が知られている。
【0003】
【発明が解決しようとする課題】
前述の内燃機関用ノック制御装置におけるノック検出システムとしては、ノックセンサで検出した振動信号波形からノック信号をバンドパスフィルタで抽出し、このノック信号のピーク出力値を対数正規分布の出力分布特性として求め、所定のノック判定レベルとの比較によりノック発生の有無を判定するものであった。
【0004】
ところで、例えば、機関回転数2000〔rpm〕,WOT(Wide Open Throttle:スロットルバルブ全開状態・全負荷)でノック発生なしのような特定の運転条件において、更に点火時期を遅角させると、通常のノック発生時の図7(a)に示すノック信号と異なる図7(b)に示すような、燃焼に関わるノイズ信号(以下、これを『疑似ノック信号』という)が発生することがあった。これらノック信号と疑似ノック信号とを比較すると、ノック信号はピーク出力タイミングが早く信号発生時間が短いのに対し、疑似ノック信号は出力値がほぼ一定で信号発生時間が長いという特徴がある。しかし、これらノック信号と疑似ノック信号との周波数はほぼ同じである。
【0005】
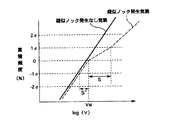
すると、図8に示すように、疑似ノック発生なし時であってノック発生なし時では、ノック信号のピーク出力値Vの対数正規分布の出力分布特性としてのlog(V)分布特性におけるlog(V)と累積頻度〔%〕との関係が略直線となりlog(V)が累積頻度2σ、即ち、約99.7〔%〕を越えても所定のノック判定レベルVthを越えないことが分かる。ところが、疑似ノック発生時では、log(V)分布特性におけるlog(V)が累積頻度0σ、即ち、50〔%〕である中央値VM を越えると、増加に転じ直線上から離れ累積頻度1σ、即ち、約84〔%〕を越えたところで所定のノック判定レベルVthを越えてしまうこととなる。
【0006】
したがって、点火時期の過渡遅角制御途中に疑似ノック信号をノック信号として誤検出すると、更なる遅角制御を遂行してしまうこととなりノック発生時の適切なフィードバック制御が不能になるという不具合があった。
【0007】
そこで、この発明はかかる不具合を解決するためになされたもので、ノック発生気筒とノイズ信号による疑似ノック発生気筒とを区別しノック発生の有無を正確に判定し内燃機関の運転状態を適切に制御可能な内燃機関用ノック制御装置の提供を課題としている。
【0008】
【課題を解決するための手段】
請求項1の内燃機関用ノック制御装置によれば、ノック検出手段で検出された内燃機関のノック発生状況における所定値が異常判定手段により比較され、その結果が所定範囲外となり異常と判定されたときには、フィードバック制御手段で内燃機関のノック制御領域内で設定された特定運転領域で予め設定された特定気筒グループに対するノックフィードバック制御が禁止され、別気筒グループに対してノックフィードバック制御が実施される。つまり、特定気筒グループを疑似ノックの発生し易い気筒グループ、別気筒グループを疑似ノックの発生し難い気筒グループに予め設定しておくことでノック発生状況で異常と判定されたときには、ノック発生の有無が正確に判定可能な別気筒グループによるノックフィードバック制御が実施されることにより内燃機関の運転状態が適切に制御される。
【0009】
請求項2の内燃機関用ノック制御装置における異常判定手段では、予め設定された各気筒グループ毎の平均ノック検出頻度とノック検出頻度との比、最大ノック検出頻度と最小ノック検出頻度との比、特定気筒グループの中で予め設定された代表気筒のノック検出頻度と別気筒グループの中で予め設定された代表気筒のノック検出頻度との比のうちの少なくとも1つを用いて比較判定される。このため、ノック発生状況が異常であるときの比較結果が所定範囲外となるように予め設定すれば、疑似ノックの発生を正確に判定することができる。
【0010】
請求項3の内燃機関用ノック制御装置における異常判定手段では、予め設定された各気筒グループ毎のノック出力分布によるノック出力の平均標準偏差値またはその比、最大標準偏差値と最小標準偏差値との比、特定気筒グループの中で予め設定された代表気筒のノック出力の標準偏差値と別気筒グループの中で予め設定された代表気筒のノック出力の標準偏差値との比のうちの少なくとも1つを用いて比較判定される。このため、ノック発生状況が異常であるときの比較結果が所定範囲外となるように予め設定すれば、疑似ノックの発生を正確に判定することができる。
【0011】
請求項4の内燃機関用ノック制御装置における異常判定手段では、請求項2によるノック検出頻度と請求項3による標準偏差値との組合せにより比較判定される。このため、ノック発生状況が異常であるときの比較結果が所定範囲外となるように予め設定すれば、疑似ノックの発生を正確に判定することができる。
【0012】
請求項5の内燃機関用ノック制御装置におけるフィードバック制御手段では、異常判定手段で異常と判定されたとき、別気筒グループに対するノックフィードバック制御におけるフィードバック定数が(全気筒数)/(禁止気筒数)の比にて変更される。このように、別気筒グループに対するフィードバック定数が適宜設定されノックフィードバック制御が実施されるため、内燃機関の運転状態が適切に制御される。
【0013】
請求項6の内燃機関用ノック制御装置におけるフィードバック制御手段では、ノックフィードバック制御を禁止しない別気筒グループのノック検出頻度が所定値以上であると、特定気筒グループに対するノックフィードバック制御の禁止が解除される。このように、疑似ノックの発生し難い別気筒グループにおけるノック検出頻度が所定値以上と高いときには実際にノック発生しているとして、疑似ノックの発生し易い特定気筒グループにおいてもノックフィードバック制御の禁止が解除されノックフィードバック制御が実施されることで、内燃機関の運転状態がより適切に制御される。
【0014】
請求項7の内燃機関用ノック制御装置おけるフィードバック制御手段では、内燃機関のノック制御領域内で設定された特定運転領域における点火時期遅角量が所定値以上と大きいときには、疑似ノックの発生し易い特定気筒グループでノックフィードバック制御が実施されると疑似ノックが発生したときに更に点火時期遅角量が増加することで疑似ノックの発生し難い別気筒グループにおける適切なノックフィードバック制御ができなくなる可能性がある。このため、特定気筒グループに対するノックフィードバック制御が禁止され、別気筒グループに対してノックフィードバック制御が実施されることで、内燃機関の運転状態が適切に制御される。
【0015】
請求項8の内燃機関用ノック制御装置によれば、ノック検出手段によるノック発生状況における点火時期遅角量に基づき燃料性状判定手段で燃料性状がレギュラと判定されたときには、フィードバック制御手段で疑似ノックの発生し易い気筒グループに対するノックフィードバック制御が禁止され、疑似ノックの発生し難い気筒グループに対してノックフィードバック制御が実施される。このように、ノック発生状況であるときプレミアム/レギュラの燃料性状判定で点火時期が遅角設定となるレギュラと判定されると疑似ノックの発生し難い、即ち、ノック発生の有無が正確に判定可能な気筒グループに対してノックフィードバック制御が実施されるため、内燃機関の運転状態が適切に制御される。
【0016】
【発明の実施の形態】
以下、本発明の実施の形態を実施例に基づいて説明する。
【0017】
図1は本発明の実施の形態の一実施例にかかる内燃機関用ノック制御装置における全体構成を示すブロック図である。
【0018】
図1において、10は内燃機関のシリンダブロック(図示略)に取付けられ、内燃機関に発生する振動信号波形を検出する振動ピックアップとしてのノックセンサであり、11はノックセンサ10の振動信号波形からノックに関連した成分を抽出する帯域幅(Q値)が10〔dB〕のバンドパスフィルタ(Band Pass Filter:特定周波数帯域通過フィルタ;以下、『BPF』と記す)である。このBPF11で抽出されたノック信号は、ピークホールド回路12にてマイクロコンピュータ20からのピークホールド信号に対応してピークホールドされたのちA/D変換器21でA/D変換(アナログ−ディジタル変換)されピーク出力値Vとしてマイクロコンピュータ20に取込まれる。
【0019】
この他、マイクロコンピュータ20には内燃機関の例えば、クランク角センサ、吸気量センサ、水温センサ等からの各種センサ信号が取込まれる。これら取込まれた信号に基づきマイクロコンピュータ20にて点火時期、燃料噴射量等が演算される。そして、マイクロコンピュータ20からその演算結果がイグナイタ30、インジェクタ(燃料噴射弁)40等に出力される。なお、本実施例の内燃機関としては、#1気筒〜#4気筒の4気筒構成が想定されている。
【0020】
ここで、マイクロコンピュータ20は、周知の各種演算処理を実行する中央処理装置としてのCPU、制御プログラムを格納したROM、各種データを格納するRAM、B/U(バックアップ)RAM、入出力回路及びそれらを接続するバスライン等からなる論理演算回路として構成されている。
【0021】
本実施例では、内燃機関の各気筒間のA/F(空燃比)差、熱引け(冷却水による各気筒の冷却)差等により疑似ノックの発生し易い気筒と疑似ノックの発生し難い気筒とに分かれることを利用しノック・疑似ノック判定を実施するものである。そして、各気筒(気筒グループ)におけるノック発生状況を比較し、疑似ノック発生と判定したときにはその疑似ノック発生に基づく誤ったノックフィードバック制御を防止するため、疑似ノックの発生し易い気筒(気筒グループ)に対してノック検出を禁止すると共に、疑似ノックの発生し難い気筒(気筒グループ)でノックフィードバック制御を実施するものである。
【0022】
次に、本発明の実施の形態の一実施例にかかる内燃機関用ノック制御装置で使用されているマイクロコンピュータ20における具体的なノック・疑似ノック判定の処理手順を示す図2のフローチャートに基づき、図3及び図4を参照して説明する。ここで、図3は各気筒(気筒グループ)毎の点火時期における進角側のノック発生時のノック判定率〔%〕及び遅角側の疑似ノック発生時にノック発生と間違う判定率〔%〕を示す特性図である。また、図4は各気筒(気筒グループ)におけるノック出力のピーク出力値Vの対数正規分布の出力分布特性としてのlog(V)分布特性を示す特性図である。なお、以下では、ノック信号のピーク出力値Vの対数正規分布の出力分布特性を、単に『log(V)分布特性』と記す。また、このノック・疑似ノック判定ルーチンはマイクロコンピュータ20にて繰返し実行される。
【0023】
図2において、ステップS101で、例えば、内燃機関の100点火毎の各気筒毎のノック検出頻度Ci (i=1,2,3,4)、内燃機関の100点火毎のlog(V)分布特性における各気筒毎の標準偏差値Si (i=1,2,3,4)がそれぞれ算出される。次にステップS102に移行して、図3に示す#3気筒及び#4気筒を疑似ノックの発生し易い気筒としてW気筒グループ、図3に示す#1気筒及び#2気筒を疑似ノックの発生し難い気筒としてB気筒グループとし、W気筒グループの最大ノック検出頻度CWmax 、B気筒グループの最大ノック検出頻度CBmax 及び最小ノック検出頻度CBmin 、W気筒グループの最大標準偏差値SWmax 、B気筒グループの最小標準偏差値SBmin がそれぞれ算出される。また、W気筒グループの最大標準偏差値SWmax をB気筒グループの最小標準偏差値SBmin で除した標準偏差値に基づく比HS(図4参照)、W気筒グループの最大ノック検出頻度CWmax をB気筒グループの最小ノック検出頻度CBmin で除したノック検出頻度に基づく比HCがそれぞれ算出される。
【0024】
次にステップS103に移行して、ノック制御領域内で予め設定された疑似ノックの発生し易い特定運転領域にあるかが判定される。ステップS103の判定条件が成立、即ち、特定運転領域にあるときにはステップS104に移行し、B気筒グループの最大ノック検出頻度CBmax が所定値K0未満であるかが判定される。ステップS104の判定条件が成立、即ち、B気筒グループの最大ノック検出頻度CBmax が所定値K0未満と少ないときにはステップS105に移行し、ステップS102で算出されたノック検出頻度に基づく比HCが所定値K1を越えているかが判定される。ステップS105の判定条件が成立、即ち、ノック検出頻度に基づく比HCが所定値K1を越え大きいときにはステップS106に移行し、ステップS102で算出された標準偏差値に基づく比HSが所定値K2を越えているかが判定される。ステップS106の判定条件が成立、即ち、標準偏差値に基づく比HSが所定値K2を越え大きいときには疑似ノック検出状態と見做しステップS107に移行し、W気筒グループのノック判定結果を反映させないようにするためノック検出反映フラグFKNWが「0(ノック発生なし)」にクリアされ、ノックフィードバック定数FBCが、例えば、ノック検出時の遅角量が通常より大きなKB値とされることで、実質ノック検出気筒数を減少させていることがカバーされ、本ルーチンを終了する。
【0025】
一方、ステップS105の判定条件が成立せず、即ち、ノック検出頻度に基づく比HCが所定値K1以下と小さいとき、またはステップS106の判定条件が成立せず、即ち、標準偏差値に基づく比HSが所定値K2以下と小さいときにはステップS108に移行する。ステップS108では、ノック検出反映フラグFKNWが「0」であるかが判定される。ステップS108の判定条件が成立、即ち、ノック検出反映フラグFKNWが「0」であるときにはステップS109に移行し、ステップS102で算出されたノック検出頻度に基づく比HCが所定値K1より小さな所定値K3未満であるかが判定される。ステップS109の判定条件が成立せず、即ち、ノック検出頻度に基づく比HCが所定値K3以上と大きいときにはステップS107に移行し、同様の処理が実行されたのち本ルーチンを終了する。
【0026】
ここで、ステップS109の判定条件が成立、即ち、ノック検出頻度に基づく比HCが所定値K3未満と小さいときには通常のノック検出状態と見做しステップS110に移行し、ノック検出反映フラグFKNWが「1」にセットされ、ノックフィードバック定数FBCが通常のKWBとされ、ノック検出状態に復帰させたのち本ルーチンを終了する。
【0027】
一方、ステップS103の判定条件が成立せず、即ち、特定運転領域にないとき、またはステップS104の判定条件が成立せず、即ち、B気筒グループの最大ノック検出頻度CBmax が所定値K0以上と大きいときには通常のノック発生条件と見做し疑似ノック検出判定を実施することのないようステップS110に移行し、同様の処理が実行されたのち本ルーチンを終了する。また、ステップS108の判定条件が成立せず、即ち、ノック検出反映フラグFKNWが「1」であるときにはステップS109をスキップしステップS110に移行し、同様の処理が実行されたのち本ルーチンを終了する。
【0028】
なお、上述のノック判定結果に基づくノック回避のための点火時期の進角/遅角処理ルーチンは省略するが、ノック検出反映フラグFKNWが「0」である疑似ノック発生条件ではW気筒グループのノック判定結果が反映されないよう考慮される。
【0029】
このように、本実施例の内燃機関用ノック制御装置は、内燃機関(図示略)のノック制御領域内で設定した特定運転領域で予め設定した1気筒以上の疑似ノックを発生し易い特定気筒グループとしてのW気筒グループと他の1気筒以上の別気筒グループとしてのB気筒グループとにおけるノック発生状況を検出するノックセンサ10、BPF(バンドパスフィルタ)11、ピークホールド回路12、マイクロコンピュータ20にて達成されるノック検出手段と、前記ノック検出手段で検出したノック発生状況における所定値を比較し、その結果が所定範囲外となるときには異常と判定するマイクロコンピュータ20にて達成される異常判定手段と、前記異常判定手段で異常と判定したときには、W気筒グループに対するノックフィードバック制御を禁止し、B気筒グループに対してノックフィードバック制御を実施するマイクロコンピュータ20にて達成されるフィードバック制御手段とを具備するものである。また、本実施例の内燃機関用ノック制御装置は、前記異常判定手段がW気筒グループの最大ノック検出頻度CWmax 、B気筒グループの最大ノック検出頻度CBmax 、B気筒グループの最小ノック検出頻度CBmin 、W気筒グループの最大標準偏差値SWmax 、B気筒グループの最大標準偏差値SBmin に基づき比較判定するものである。
【0030】
つまり、ノック発生状況における所定値として各気筒グループのノック検出頻度及び標準偏差値を用いて比較判定され、その結果が所定範囲外となるときにはノック発生時と異なる異常な疑似ノック発生時と判定され、疑似ノックの発生し易いW気筒グループに対するノックフィードバック制御が禁止され、疑似ノックの発生し難いB気筒グループに対してノックフィードバック制御が実施される。このように、ノック発生状況であるときには各気筒グループのノック検出頻度及び標準偏差値を用い疑似ノックの発生し易さが比較判定され、疑似ノックの発生し難い、即ち、ノック発生の有無が正確に判定可能な気筒グループに対してノックフィードバック制御が実施されるため、内燃機関の運転状態を適切に制御することができる。
【0031】
次に、本発明の実施の形態の一実施例にかかる内燃機関用ノック制御装置で使用されているマイクロコンピュータ20におけるノック・疑似ノック判定の処理手順の変形例を示す図5のフローチャートに基づいて説明する。なお、このノック・疑似ノック判定ルーチンはマイクロコンピュータ20にて繰返し実行される。また、このノック判定結果に基づくノック回避のための点火時期の進角/遅角処理ルーチンは省略する。
【0032】
図5において、ステップS201で、ノック制御領域内で予め設定された疑似ノックの発生し易い特定運転領域にあるかが判定される。ステップS201の判定条件が成立、即ち、特定運転領域にあるときにはステップS202に移行し、点火時期遅角量TRETが所定値K4未満であるかが判定される。ステップS202の判定条件が成立、即ち、点火時期遅角量TRETが所定値K4未満と小さいときには疑似ノック検出状態と見做しステップS203に移行し、W気筒グループのノック判定結果を反映させないようにするためノック検出反映フラグFKNWが「0(ノック発生なし)」にクリアされ、ノックフィードバック定数FBCが、例えば、ノック検出時の遅角量が通常より大きなKB値とされることで、実質ノック検出気筒数を減少させていることがカバーされる。
【0033】
一方、ステップS201の判定条件が成立せず、即ち、特定運転領域にないとき、またはステップS202の判定条件が成立せず、即ち、点火時期遅角量TRETが所定値K4以上と大きいときにはステップS204に移行する。ステップS204では、ノック遅角量の大小に基づき現在使用されている燃料性状がプレミアム(ハイオク)またはレギュラであるかの判定結果であるプレミアム判定フラグFHRが「1」にセットされているかが判定される。ステップS204の判定条件が成立せず、即ち、プレミアム判定フラグFHRが「0(レギュラ)」と判定されているときにはステップS203に移行し、同様の処理が実行されたのち本ルーチンを終了する。
【0034】
一方、ステップS204の判定条件が成立、即ち、プレミアム判定フラグFHRが「1(プレミアム)」と判定されているときには通常のノック検出状態と見做しステップS205に移行し、ノック検出反映フラグFKNWが「1」にセットされ、ノックフィードバック定数FBCが通常のKWBとされ、ノック検出状態に復帰させたのち本ルーチンを終了する。
【0035】
このように、本変形例の内燃機関用ノック制御装置は、内燃機関(図示略)のノック制御領域内で設定した特定運転領域で予め設定した1気筒以上の疑似ノックを発生し易い特定気筒グループとしてのW気筒グループと他の1気筒以上の別気筒グループとしてのB気筒グループとにおけるノック発生状況を検出するノックセンサ10、BPF(バンドパスフィルタ)11、ピークホールド回路12、マイクロコンピュータ20にて達成されるノック検出手段と、前記ノック検出手段で検出したノック発生状況における点火時期遅角量に基づきプレミアム/レギュラの燃料性状を判定するマイクロコンピュータ20にて達成される燃料性状判定手段と、前記燃料性状判定手段で点火時期が遅角設定となるレギュラと判定したときには、W気筒グループに対するノックフィードバック制御を禁止し、B気筒グループに対してノックフィードバック制御を実施するマイクロコンピュータ20にて達成されるフィードバック制御手段とを具備するものである。
【0036】
つまり、ノック発生状況における点火時期遅角量に基づき燃料性状がレギュラと判定されたときには、疑似ノックの発生し易いW気筒グループに対するノックフィードバック制御が禁止され、疑似ノックの発生し難いB気筒グループに対してノックフィードバック制御が実施される。このように、ノック発生状況であるときプレミアム/レギュラの燃料性状判定で点火時期が遅角設定となるレギュラと判定されると疑似ノックの発生し難い、即ち、ノック発生の有無が正確に判定可能な気筒グループに対してノックフィードバック制御が実施されるため、内燃機関の運転状態を適切に制御することができる。
【0037】
ところで、上記実施例では、疑似ノックの発生し易いW気筒グループと他の疑似ノックの発生し難いB気筒グループとについて比較したが、本発明を実施する場合には、これに限定されるものではなく、各気筒グループのそれぞれの代表気筒のノック発生状況を比較してもよく、また、各気筒グループのノック発生状況における平均値で比較してもよい。
【0038】
また、上記実施例では、ノック検出頻度及び標準偏差値を用いて比較判定する場合について説明したが、ノック検出頻度または標準偏差値の何れか一方を用いて判定してもよい。また、疑似ノックの発生し易い内燃機関、疑似ノックの発生し難い内燃機関等で選択的に実施または誤検出回避を積極的に実施、更にノック制御システムのロジック中でノック検出頻度、標準偏差値を通常の演算値として用いているか否かによるロジック変更のし易さで使い分けることも可能である。
【0039】
そして、疑似ノック発生なしの運転条件に復帰したか否かの判定では、疑似ノック発生状況の判定と同様、ノック検出頻度または標準偏差値の使い分けが可能である。疑似ノック発生の有無は、図6に示すように、log(V)分布特性における累積頻度の1σ〔%〕に対応するlog(V)の幅Sから累積頻度の−1σ〔%〕に対応するlog(V)の幅S′を減算した絶対値(疑似ノック発生なし時で理想的には「0」となる)に基づき判定、またはlog(V)が累積頻度0σ、即ち、50〔%〕である中央値VM の前後における直線性に基づき判定してもよい。この場合には、各気筒グループ毎に比較する必要はない。
【0040】
更に、簡単なノック判定ロジックとして例えば、アナログ方式でA/D変換機能のないもの等においては、図3に示す特性図において、点火時期が遅角設定となる条件で疑似ノックの発生し易い特定気筒(W気筒グループ)のノックフィードバック制御を禁止し、別気筒(B気筒グループ)でノックフィードバック制御するようにしても同様の効果を得ることができる。
【図面の簡単な説明】
【図1】 図1は本発明の実施の形態の一実施例にかかる内燃機関用ノック制御装置における全体構成を示すブロック図である。
【図2】 図2は本発明の実施の形態の一実施例にかかる内燃機関用ノック制御装置で使用されているマイクロコンピュータにおけるノック・疑似ノック判定の処理手順を示すフローチャートである。
【図3】 図3は本発明の実施の形態の一実施例にかかる内燃機関用ノック制御装置による各気筒毎の点火時期における進角側のノック発生時のノック判定率及び遅角側の疑似ノック発生時にノック発生と間違う判定率を示す特性図である。
【図4】 図4は本発明の実施の形態の一実施例にかかる内燃機関用ノック制御装置における各気筒毎のlog(V)分布特性を示す特性図である。
【図5】 図5は本発明の実施の形態の一実施例にかかる内燃機関用ノック制御装置で使用されているマイクロコンピュータにおけるノック・疑似ノック判定の処理手順の変形例を示すフローチャートである。
【図6】 図6は本発明の実施の形態の一実施例にかかる内燃機関用ノック制御装置における疑似ノック発生なし気筒及び疑似ノック発生気筒のlog(V)分布特性を利用したノック・疑似ノック判定を示す特性図である。
【図7】 図7はノック信号と特定の運転条件における疑似ノック信号との違いを示す図である。
【図8】 図8は従来の内燃機関用ノック制御装置における疑似ノック発生なし気筒及び疑似ノック発生気筒のlog(V)分布特性を示す特性図である。
【符号の説明】
10 ノックセンサ
11 BPF(バンドパスフィルタ)
12 ピークホールド回路
20 マイクロコンピュータ
Claims (8)
- 内燃機関のノック制御領域内で設定した特定運転領域で予め設定した1気筒以上の疑似ノックを発生し易い特定気筒グループと他の1気筒以上の別気筒グループとにおけるノック発生状況を検出するノック検出手段と、
前記ノック検出手段で検出した前記ノック発生状況における所定値を比較し、その結果が所定範囲外となるときには異常と判定する異常判定手段と、
前記異常判定手段で異常と判定したときには、前記特定気筒グループに対するノックフィードバック制御を禁止し、前記別気筒グループに対してノックフィードバック制御を実施するフィードバック制御手段と
を具備することを特徴とする内燃機関用ノック制御装置。 - 前記異常判定手段は、予め設定した各気筒グループ毎の平均ノック検出頻度とノック検出頻度との比、前記各気筒グループ毎の最大ノック検出頻度と最小ノック検出頻度との比、前記特定気筒グループの中で予め設定した代表気筒のノック検出頻度と前記別気筒グループの中で予め設定した代表気筒のノック検出頻度との比のうち少なくとも1つに基づき比較判定することを特徴とする請求項1に記載の内燃機関用ノック制御装置。
- 前記異常判定手段は、予め設定した各気筒グループ毎のノック出力分布から求めたノック出力の平均標準偏差値またはその比、前記各気筒グループ毎のノック出力の最大標準偏差値と最小標準偏差値との比、前記特定気筒グループの中で予め設定した代表気筒のノック出力の標準偏差値と前記別気筒グループの中で予め設定した代表気筒のノック出力の標準偏差値との比のうち少なくとも1つに基づき比較判定することを特徴とする請求項1に記載の内燃機関用ノック制御装置。
- 前記異常判定手段は、予め設定した各気筒グループ毎の平均ノック検出頻度とノック検出頻度との比、前記各気筒グループ毎の最大ノック検出頻度と最小ノック検出頻度との比、前記特定気筒グループの中で予め設定した代表気筒のノック検出頻度と前記別気筒グループの中で予め設定した代表気筒のノック検出頻度との比、前記気筒グループ毎のノック出力分布から求めたノック出力の平均標準偏差値またはその比、前記各気筒グループ毎のノック出力の最大標準偏差値と最小標準偏差値との比、前記特定気筒グループの中で予め設定した代表気筒のノック出力の標準偏差値と前記別気筒グループの中で予め設定した代表気筒のノック出力の標準偏差値との比のうち少なくとも2つの組合せに基づき比較判定することを特徴とする請求項1に記載の内燃機関用ノック制御装置。
- 前記フィードバック制御手段は、前記異常判定手段による異常判定時、前記別気筒グループに対してノックフィードバック制御を実施する際のフィードバック定数を(全気筒数)/(禁止気筒数)の比で変更することを特徴とする請求項1に記載の内燃機関用ノック制御装置。
- 前記フィードバック制御手段は、ノックフィードバック制御を禁止しない前記別気筒グループのノック検出頻度が所定値以上のとき、前記特定気筒グループに対するノックフィードバック制御の禁止を解除することを特徴とする請求項1に記載の内燃機関用ノック制御装置。
- 前記フィードバック制御手段は、前記内燃機関のノック制御領域内で設定した特定運転領域で点火時期遅角量が所定値以上であるときには、前記特定気筒グループに対するノックフィードバック制御を禁止し、前記別気筒グループに対してノックフィードバック制御することを特徴とする請求項1に記載の内燃機関用ノック制御装置。
- 内燃機関のノック制御領域内で設定した特定運転領域で予め設定した1気筒以上の疑似ノックを発生し易い特定気筒グループと他の1気筒以上の別気筒グループとにおけるノック発生状況を検出するノック検出手段と、
前記ノック検出手段で検出した前記ノック発生状況における点火時期遅角量に基づきプレミアム/レギュラの燃料性状を判定する燃料性状判定手段と、
前記燃料性状判定手段で点火時期が遅角設定となるレギュラと判定したときには、前記特定気筒グループに対するノックフィードバック制御を禁止し、前記別気筒グループに対してノックフィードバック制御を実施するフィードバック制御手段と
を具備することを特徴とする内燃機関用ノック制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP35719599A JP3737005B2 (ja) | 1999-12-16 | 1999-12-16 | 内燃機関用ノック制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP35719599A JP3737005B2 (ja) | 1999-12-16 | 1999-12-16 | 内燃機関用ノック制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001173502A JP2001173502A (ja) | 2001-06-26 |
| JP3737005B2 true JP3737005B2 (ja) | 2006-01-18 |
Family
ID=18452886
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP35719599A Expired - Fee Related JP3737005B2 (ja) | 1999-12-16 | 1999-12-16 | 内燃機関用ノック制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3737005B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4605642B2 (ja) * | 2004-12-14 | 2011-01-05 | 株式会社デンソー | 内燃機関のノック判定装置 |
-
1999
- 1999-12-16 JP JP35719599A patent/JP3737005B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001173502A (ja) | 2001-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US4913116A (en) | Ignition timing control apparatus for an internal combustion engine | |
| JP2007077969A (ja) | 内燃機関のノック判定装置 | |
| JP2007009728A (ja) | 内燃機関の点火時期制御装置 | |
| JPH0346666B2 (ja) | ||
| US20230400002A1 (en) | Control apparatus for internal combustion engine | |
| JP4229142B2 (ja) | 内燃機関のノック制御装置 | |
| US4770143A (en) | System and method for controlling ignition timing for an internal combustion engine | |
| JP3737005B2 (ja) | 内燃機関用ノック制御装置 | |
| JP2715513B2 (ja) | 内燃機関のノッキング検出装置 | |
| JP4390939B2 (ja) | 内燃機関用ノック制御装置 | |
| JP4925251B2 (ja) | 内燃機関のノック判定装置 | |
| JP3868172B2 (ja) | 内燃機関用制御装置 | |
| JP6554073B2 (ja) | 内燃機関の制御装置及びノック判定方法 | |
| JP2009115011A (ja) | 内燃機関のノック判定装置 | |
| JP2004052614A (ja) | ノック制御装置 | |
| JPS6278480A (ja) | 内燃機関の点火時期制御装置 | |
| JP3737004B2 (ja) | 内燃機関用ノック制御装置 | |
| JP3153394B2 (ja) | 内燃機関のノッキング検出方法 | |
| JP3193692B2 (ja) | 内燃機関のノック判定用学習値の学習方法 | |
| JP4487453B2 (ja) | 内燃機関用ノッキング検出装置 | |
| US10450971B2 (en) | Method and device for controlling a combustion of an internal combustion engine | |
| JP2005036652A (ja) | 内燃機関の制御装置 | |
| JP2712610B2 (ja) | ノック制御装置 | |
| JP2940035B2 (ja) | 内燃機関の燃料噴射制御装置 | |
| JPH07293314A (ja) | 内燃機関のノック制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20041124 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20051025 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20051025 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091104 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101104 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111104 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121104 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131104 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |