JP3671793B2 - 電磁駆動弁の制御装置 - Google Patents
電磁駆動弁の制御装置 Download PDFInfo
- Publication number
- JP3671793B2 JP3671793B2 JP2000013222A JP2000013222A JP3671793B2 JP 3671793 B2 JP3671793 B2 JP 3671793B2 JP 2000013222 A JP2000013222 A JP 2000013222A JP 2000013222 A JP2000013222 A JP 2000013222A JP 3671793 B2 JP3671793 B2 JP 3671793B2
- Authority
- JP
- Japan
- Prior art keywords
- electromagnet
- control
- mover
- valve
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


















Landscapes
- Valve Device For Special Equipments (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
Description
【発明の属する技術分野】
本発明は、電磁駆動弁の制御装置に関し、特に、可動子の位置に応じた通電制御を行う電磁駆動弁の制御装置に関する。
【0002】
【従来の技術】
車両用エンジンの吸排気弁の駆動方式において、従来のカムにより弁体を駆動するカム駆動方式に代えて、電磁力により弁体を駆動する電磁駆動弁が提案されている。この電磁駆動弁によれば、弁体駆動用のカム機構が不要となることに加えて、エンジンの動作状態に応じて吸排気弁の開閉時期を容易に最適化することができ、エンジンの出力向上及び燃費の向上を図ることができる。
【0003】
このような電磁駆動弁の従来技術としては、特開平10−205314号公報記載の「ガス交換弁の電磁弁駆動部を制御する方法」(以下、第1従来技術)、特開平10−220622号公報記載の「幅の狭い構造の電磁式アクチュエータ」(以下、第2従来技術)が開示されている。
【0004】
【発明が解決しようとする課題】
一般に電磁駆動弁では、弁体もしくは可動子(可動部)の一部が閉弁時および最大開弁時に電磁石と着座する。そのため着座時の衝突音が発生する。
【0005】
このため第1従来技術、第2従来技術では電磁石の形状を変え、可動部と電磁石とが接触しない位置で磁力が最大となり、可動部が電磁石に着座する前に停止保持される電磁駆動弁が開示されている。
【0006】
しかしながら、可動部を電磁石に着座する前に停止保持するには、着座させる場合と比較して、大きな磁力を発生させることが必要であり、消費電力が増大するという問題点がある。本願出願人は、前記第1従来技術、第2従来技術に比較して、可動部を電磁石に着座する前に停止保持する方式で、消費電力を節減できる構成としたものを先に提案したが(特願平10−359591号)、それでも、電磁石に着座させる場合と比較すると消費電力が増大する。
【0007】
本発明は、このような従来の課題に鑑みなされたもので、衝突音による影響を回避しつつ可及的に消費電力を節減できるようにした電磁駆動弁の制御装置を提供することを目的とする。
【0008】
【課題を解決するための手段】
このため請求項1に係る発明は、
エンジンの吸・排気弁に用いられ、電磁石と、該電磁石によりスプリングの反力に抗して駆動される可動子及び該可動子に連係して駆動される弁体を備え、前記可動子の位置を検出しつつ前記電磁石を通電制御する電磁駆動弁の制御装置であって、
前記可動子を前記電磁石に着座する直前の位置で停止させる制御と、前記可動子を前記電磁石に着座させる制御とを、エンジン運転状態に応じて切り換えることを特徴とする。
【0009】
請求項1に係る発明によると、
エンジン運転状態に応じて、可動子を電磁石に着座する直前の位置で停止させる制御と、前記可動子を前記電磁石に着座させる制御とが、切り換えられる。
【0010】
これにより、可動子の電磁石に着座する際の衝突音が問題となる運転状態では、可動子を電磁石に着座する直前の位置で停止させる制御が実行され、消費電力の節減が重視される運転状態では、可動子を前記電磁石に着座させる制御が実行されて、エンジンの静粛性と運転性能とを両立できる。
【0011】
また、請求項2に係る発明は、
前記可動子を前記電磁石に着座する直前の位置で停止させる制御は、前記可動子を前記電磁石に相対的に離れた位置で一旦停止させた後、最終的に前記電磁石に相対的に近い位置に停止させる2段制御と、1つの最終位置のみで停止させる制御とを、エンジン運転状態に応じて切り換えることを特徴とする。
【0012】
請求項2に係る発明によると、
可動子を電磁石に着座する直前の位置で停止させる制御を行なうエンジン運転状態において、さらに、可動子の停止位置を2段階とする制御と、1つの最終位置のみで停止させる制御とが、エンジン運転状態に応じて切り換えられる。
【0013】
これにより、エンジン運転状態に応じて、静粛性、応答性などから最も重視すべき条件を満たすように制御を切り換えることができる。
また、請求項3に係る発明は、
エンジンの吸・排気弁に用いられ、電磁石と、該電磁石によりスプリングの反力に抗して駆動される可動子及び該可動子に連係して駆動される弁体を備え、前記可動子の位置を検出しつつ前記電磁石に着座する直前の位置で停止させるように通電制御する電磁駆動弁の制御装置であって、
前記可動子を前記電磁石に相対的に離れた位置で一旦停止させた後、最終的に前記電磁石に相対的に近い位置に停止させる2段制御と、1つの最終位置のみで停止させる制御とを、エンジン運転状態に応じて切り換えることを特徴とする。
【0014】
請求項3に係る発明によると、
エンジン運転状態に応じて、可動子の停止位置を2段階とする制御と、1つの最終位置のみで停止させる制御とが、切り換えられる。
【0015】
これにより、可動子を電磁石に着座する直前の位置で停止させる制御を行なうことで、静粛性を確保しつつ、さらにエンジン運転状態に応じて、静粛性、応答性などから最も重視すべき条件を、より高めることができるように制御を切り換えることができる。
【0016】
また、請求項4に係る発明は、
前記弁体と前記可動子とは、別体で構成され、閉弁時には、弁体が閉弁位置に着座した後、可動子が弁体から切り離されてさらに電磁石に近づけられるように制御されることを特徴とする。
【0017】
請求項4に係る発明によると、
閉弁時に、始めは弁体と可動子とが一体に連動し、弁体が閉弁位置に着座した後は、可動子が弁体から切り離されてさらに電磁石に近づけられるように制御される。
【0018】
これにより、吸・排気弁の閉弁シール性を確保できると共に、可動子がさらに電磁石に近づけられるように制御されることで、消費電力を節減できる。
また、請求項5に係る発明は、
前記各制御は、エンジンの回転速度、負荷の少なくとも一方に基づいて切り換えられることを特徴とする。
【0019】
請求項5に係る発明によると、
前記可動子を電磁石に着座する直前の位置で停止させる制御と前記可動子を前記電磁石に着座させる制御、また、可動子の停止位置を2段階とする制御と1つの最終位置のみで停止させる制御などが、エンジンの回転速度、負荷の少なくとも一方に基づいて切り換えられる。
【0020】
これにより、エンジンの回転速度や負荷により、例えば、アイドル運転時は、可動子の着座音が問題になるので静粛性を重視した可動子を電磁石に着座する直前の位置で停止させる制御、さらには可動子の停止位置を2段階とする制御を選択し、高出力領域では他の音に隠れて着座音があまり問題にならず、一方消費電力の増大による出力低下、開弁時はバルブリフト量に低下による出力低下や応答性低下なども問題となるので、可動子を着座させる制御を選択するなど、最適な制御に切り換えることができる。
【0021】
【発明の実施形態】
次に図面を参照して、本発明の実施形態を詳細に説明する。
図1は、本発明に係る電磁駆動弁の制御装置を車両用エンジンに適用した全体構成を示す図である。
【0022】
同図に示すように、エンジンのシリンダ51の上部に固定されたシリンダヘッド52には、吸気弁または排気弁となる弁体54(図2では単一の弁のみを示す)が設けられている。弁体54の上方に伸延する弁軸54aの上部には、スプリングリテーナ55が固定され、該スプリングリテーナ55とシリンダヘッド52との間には弁体54を閉弁側に付勢するコイルスプリング56が設けられている。
【0023】
またシリンダヘッド52の上部には電磁駆動弁のケースとなるハウジング60が立設されている。該ハウジング60の内部には、閉弁側電磁石11と、開弁側電磁石12とが所定の間隔をあけて上下に対向する位置に固定されている。これら閉弁側電磁石11と開弁側電磁石12との間には、軟磁性体の可動子(アーマチュア)57が可動子軸部材57aにより上下に滑動可能に支持されている。
【0024】
閉弁側電磁石11より上方の位置には、可動子軸部材57aにスプリングリテーナ58が固定され、ハウジング60の頂壁内面とスプリングリテーナ58との間には、可動子57を開弁側に付勢するコイルスプリング59が設けられている。
【0025】
またハウジング60の頂壁には、前記弁体54と可動子57とで構成される可動部の速度を検出し速度信号を出力する可動部速度センサ2、可動部の位置を検出し位置信号を出力する可動部位置センサ3が設けられ、これら速度信号及び位置信号は、電磁駆動弁の制御装置1に出力される。
【0026】
さらに制御装置1は、エンジン制御ECU8から開弁指令/閉弁指令が伝達され、制御装置1は閉弁側電磁石電流制御部9及び開弁側電磁石電流制御部10に対して電流目標値を出力するようになっている。
【0027】
閉弁側電磁石電流制御部9及び開弁側電磁石電流制御部10は、それぞれ入力された電流目標値に応じたPWM制御により電源部13から各電磁石11,12へ電流を供給することにより電磁力を制御できるようになっている。
【0028】
次に、電磁駆動弁および電磁駆動弁の制御装置の動作の概要を説明する。
可動子57はコイルスプリング56,59に懸吊されており、閉弁側電磁石11および開弁側電磁石12が通電していないとき、閉弁側電磁石11と開弁側電磁石12の概略中央に位置するように、それぞれのコイルスプリング56,59の寸法及びバネ定数が設定されている。
【0029】
ここで、コイルスプリング56,59と、弁54双び可動子57を含む可動部とで構成されるバネ・マス系の固有振動数foは、合成バネ定数をK、合計慣性質量をmとすると、fo=2π√(K/m)であることが知られている。
【0030】
さてエンジン始動前の初期動作において、上記固有振動数foに対応する周期で閉弁側電磁石11と開弁側電磁石12に交互に通電する。そして、可動部を共振させることにより徐々に可動部の振幅を増大させ、初期動作の最終段階で、閉弁又は開弁状態に維持される。
【0031】
次に、エンジンの始動時または通常の稼働時には、例えば開弁時はまず閉弁側電磁石11の電流が切られ、可動部はコイルスプリングのバネ力により下方に移動を開始する。摩擦力などによるエネルギー損失のため、バネ力だけで弁全開位置まで可動子57を移動させることはできない。そこで、可動子57が開弁側電磁石12に十分近づき、電磁力が有効となる位置で開弁側電磁石12が通電され、可動子57の運動を助勢する。
【0032】
このとき制御装置1は可動部位置センサ3及び可動部速度センサ2から、可動子57の位置及び速度を入力し、可動部の速度が速度目標値を追従するように開弁側電磁石電流制御部10に指令値を発する。制御装置の指令値に応じて開弁側電磁石12の電流が制御された結果(開弁側電磁石12の電磁力が制御された結果)、可動子57と開弁側電磁石12は所定の速度以下(例えば0.1[m/s]以下)で当接し、そこで可動部が停止する。もしくは、開弁側電磁石12と可動子57とのギャップが例えば数百ミクロンになる位置で可動部の速度が0となって停止するように制御される。後に、詳述するように、上記可動子が電磁石に着座する制御と電磁石に着座する直前で停止する制御が、エンジンの運転状態に基づいて切り換えられる。
【0033】
閉弁時は開弁側電磁石12の電流は切られる。可動子57と弁54はコイルスプリング59およびコイルスプリング56の力により上方へ移動するが、摩擦力などによるエネルギー損失のため、バネ力だけで閉弁位置まで可動子57を移動させることはできない。そこで、可動子57が閉弁側電磁石11に十分近づき、電磁力が有効となる位置で閉弁側電磁石11が通電され、可動子57の運動を助勢する。まず、弁が閉位置となり、一体化して移動していた弁と可動子57が分離する。可動子57は電磁力に助勢されてそのまま閉弁側電磁石11に接近する。制御装置は弁54と弁座52aとが激突(大きな速度での衝突)することがないよう可動部位置センサ3もしくは可動部速度センサ2が可動部の運動を検出し、閉弁側電磁石電流制御部9により閉弁側電磁石11の電流を調節する。
【0034】
このとき弁体と弁座52aとが当接する速度は、例えば0.1[m/s]以下になるよう可動部の速度が制御される。また、可動子57と閉弁側電磁石11は所定の速度以下(例えば0.1[m/s]以下)で当接して停止し、もしくは、閉弁側電磁石11と可動子57のギャップが例えば数百ミクロンになる位置で可動子57の速度が0となって停止するように制御される。そして、後に詳述するように、上記可動子が電磁石に着座する制御と電磁石に着座する直前で停止する制御、さらには、可動子の停止位置を2段階とする制御と1つの最終位置のみで停止させる制御とが、エンジンの運転状態に基づいて切り換えられる。
【0035】
図2は、本発明に係る電磁駆動弁の制御装置の第1実施形態の構成を示すブロック図である。
同図において、制御装置1は、前記可動部位置センサ3が出力する位置信号に基づいて可動部の速度目標値を生成する速度目標値生成部4と、前記可動部速度センサ2が出力する速度信号と速度目標値とを比較する比較部5と、該比較部5の比較結果に応じて前記閉弁側電磁石11または開弁側電磁石12に通電すべき電流目標値を生成する電流目標値生成部6と、該生成された電流目標値を前記閉弁側電磁石電流制御部9または開弁側電磁石電流制御部10のいずれに供給するかを切り換える切替器7とを備えている。
【0036】
以下、各部の機能を詳細に説明する。速度目標値生成部4は、速度目標値rを、
【0037】
【数1】

に示すように生成する(図3参照)。
ここでzは可動部位置センサ3の出力から演算される可動子57と可動子57を引きつけている電磁石との距離(ギャップ)、tは時刻、v(t)は可動部速度センサ2が検出した可動部の速度、または可動部位置センサ3が検出した位置信号の出力から演算されるzの時間微分値である。r1(z),r2(z)はギャップzの関数として与えられる速度目標関数であり、これら速度目標関数が、本発明における可動部の複数の運動特性目標値に相当する。そして、第1の速度目標関数r1(z)は、ギャップzが次第に小さくなり第1の所定値zs0になった時点ts0つまり電磁石への通電制御が開始される時点で選択され、ギャップzが更に減少して第2の所定値zsになった時点で第2の速度目標関数r2(z)が選択されて切り換えられる。前記第1の所定値zs0はギャップzが小さくなり電磁力が有効になるギャップ長を基準に選ばれ、実際には1〜3[mm]程度である。
【0039】
これら第1の速度目標関数r1(z)及び第2の速度目標関数r2(z)は次の条件を満たすように決定される。以下では、z,tの関数における(z),(t)を省略する。
【0040】
【数2】
と選ぶと、速度目標関数の切り換え点において、速度目標値を連続にすることができる。ここで、sはラプラス演算子、zsは速度目標値を切り換える位置(設計者が与える所定値)、zeは可動子の制御目標位置(設計者が与える所定値)、rsは速度目標値を切り換える直前の速度目標値、ζ,ωは、設計者が適当に選ぶ定数である。
【0042】
第1の速度目標関数r1は、着座までの時間を短くすることを主眼に設定された、応答の速い2次振動系の応答に基づいて設定された速度目標値であり、ζは、0.7付近、ωは[(m1+m2)/(k1+k2)]1/2程度の値に選ぶ。ここで、m1,m2はそれぞれ可動子と弁の質量、k1,k2はそれぞれコイルスプリング59およびコイルスプリング56のバネ定数である。
【0043】
一方、第2の速度目標関数r2は、着座の速度を小さくすることを主眼に選ばれる。既述のように、式(3),(4)のように選ぶと、速度目標値はzsの位置で滑らかに接続される。式(3)を用いると、r2は1次応答を元に設定されるので、可動部位置はオーバーシュートせず、漸近的に目標位置に収束するので、着座の衝撃を小さくすることができる。
【0044】
また、第2の速度目標関数r2は、
【0045】
【数3】
とし、振動の減衰度を決定する定数ζ2を1より大きくした非振動的な2次応答特性を有した関数を用いてもよい。
以上のようにして設定された速度目標値rは、可動部速度センサ2によって検出された実際の可動部速度v(=dz/dt) と比較部4により比較され、比較信号(v−r)が電流目標値生成部6に出力される。電流目標値生成部6では、電流目標値i(t)を、次に示す式(6)のように生成する。
【0047】
【数4】
ここで、kは適当に決める正の定数(フィードバックゲイン)である。なお、z>zs0 の区間ではr=v(=dz/dt)であるから通電による速度制御は発生しない。
【0049】
この電流目標値を電磁石の通電電流として、切替器7を介して閉弁側電磁石電流制御部9または開弁側電磁石電流制御部10に伝達される。ここで、切替器7は、エンジン制御ECU8より開弁指令または閉弁指令を入力し、開弁指令であれば開弁側電磁石電流制御部10、閉弁指令であれば閉弁側電磁石電流制御部9をそれぞれ選択し、選択された側に電流目標値生成部6が生成する電流目標値を出力する。そして、閉弁側電磁石電流制御部9または開弁側電磁石電流制御部10がPWM制御により電源部13から供給される電流のON/OFF比を制御することにより通電電流の大きさが制御され、結果として可動子に作用する電磁力が制御され、可動部の速度が制御される。
【0050】
ここで、本発明では、前記第2の速度目標関数r2における制御目標位置zeをエンジン運転状態に基づいて切り換えることで、可動子が電磁石に着座する制御(以下着座制御という)と電磁石に着座する直前で停止する制御(以下宙吊り制御という)、さらには、可動子の停止位置を2段階とする制御(以下2段宙吊り制御という)と1つの最終位置のみで停止させる制御(以下1段宙吊り制御という)とを切り換える。
【0051】
図4は、前記切換制御の第1の実施例のフローチャートを示す。
ステップ(図ではSと記す。以下同様)1では、エンジン回転速度を検出する。
【0052】
ステップ2では、検出されたエンジン回転速度Neが所定回転速度N0未満の低速域であるか否かを判定し、該低速域と判定されたときは、ステップ3へ進んで宙吊り制御(1段宙吊り制御)を選択する。
【0053】
ステップ4では、前記可動子57の制御目標位置ze(宙吊り目標位置H0)を、電磁石(開弁時は開弁側電磁石12、閉弁時は閉弁側電磁石11)に着座する直前の位置に設定する。
【0054】
ステップ5では、前記設定された制御目標位置zeとなるように、宙吊り制御(1段宙吊り制御)を開始する。
一方、ステップ2で、エンジン回転速度Neが所定回転速度N0以上の中高速域と判定された場合は、ステップ6へ進んで可動子57を電磁石(開弁時は開弁側電磁石12、閉弁時は閉弁側電磁石11)に着座する着座制御を選択し、ステップ7で該着座制御を開始する。該着座制御は、前記可動子57の制御目標位置zeを電磁石に着座停止する位置つまりze=0に設定し、該着座停止位置での速度目標値vを正の所定値(例えば0.1[m/s]以下)に設定することで制御する。
【0055】
このようにすれば、エンジンの低速域では、エンジンの燃焼騒音などが小さいため、着座制御を行なうと可動子の着座音が騒音に占める比率が大きくなって耳障りとなるが、該低速域で宙吊り制御を行なうことによって、該着座音の発生を防止することができ、快適な乗車環境が得られる。
【0056】
また、エンジンの中高速域では、エンジンの燃焼騒音が増大するため、可動子の着座音が騒音に占める比率が小さくなって気にならなくなる一方、宙吊り制御を行なうと消費電力が増大して出力低下により運転性能に影響してくるが、該中高速域で、着座制御を行なうことによって、運転性能を確保することができる。
【0057】
図5は、前記低速域で実行される1段宙吊り制御時の可動子位置の変化を示し、図6は、前記中高速域で実行される着座制御時の可動子位置の変化の様子を示す。
【0058】
図7は、前記切換制御の第2の実施例のフローチャートを示し、エンジン回転速度Neの代わりにエンジンの負荷L(燃料噴射量、吸入空気量、スロットル弁開度など)に基づいて切換制御を行なうものであり、所定の負荷L0未満の低負荷域で1段宙吊り制御を行ない(ステップ11〜ステップ15)、L0以上の中高負荷域で着座制御を行なう(ステップ16,ステップ17)。負荷についても回転速度と同様に負荷が小さい時は可動子の着座音が耳障りとなり、負荷が大きくなるほど可動子の着座音の影響が小さくなる一方、消費電力による出力低下の影響が大きくなるので、作用・効果は第1の実施例と略同様である。
【0059】
図8は、前記切換制御の第3の実施例のフローチャートを示し、エンジンの回転速度Neと負荷Lとからマップ(図9参照)により検索される運転領域に基づいて切換制御を行なうものであり、低速・低負荷領域で宙吊り制御(1段宙吊り制御)を行ない(ステップ21〜ステップ26)、中高速・中高負荷領域で着座制御を行なう(ステップ27,ステップ28)。作用・効果は第1、第2の実施例と略同様である。
【0060】
次に、前記1段宙吊り制御と2段宙吊り制御とをエンジン運転状態に応じて切換制御する発明について説明する。但し、本実施の形態では、本発明を閉弁時の制御についてのみ適用し、開弁時については、前記第1の発明における各実施例のいずれか、又は、全運転領域にわたって1段宙吊り制御か、2段宙吊り制御のいずれかを実行する。
【0061】
図10は、同上発明の第1の実施例のフローチャートを示し、エンジン回転速度Neが所定回転速度N0未満の低速域で2段宙吊り制御を行ない(ステップ31〜ステップ36)、所定回転速度N0以上の中高速域で1段宙吊り制御を行なうようにしたものである(ステップ37〜ステップ39)。1段宙吊り制御の制御内容については、前記図4,図5で説明した通りである。2段宙吊り制御について説明すると、前記第2の速度目標関数r2における制御目標位置zeを、第1の停止位置ze1(ステップ34の第1目標宙吊り位置H1)第2の停止位置ze2(ステップ35の第2目標宙吊り位置H2)とに切り換える。例えば、第1の停止位置ze1のときの速度目標値をre1、第2の制御目標位置をze2のときの速度目標値をre2とし、ze1=0.3[mm] re1=0[m/s]、ze2=0.1[mm] re2=0[m/s]と設定する。
【0062】
なお、制御目標位置の切り換えについては、センサで検出された可動子の位置及び速度から、略z=ze1、v=re1となったときに、制御目標位置をz=ze2に切り換えて設定する。
【0063】
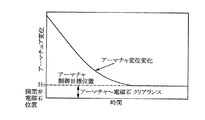
ここで、第1の制御目標位置ze1は、弁体が閉弁着座した時点の可動子位置近傍(閉弁着座時の位置よりやや電磁石寄り)に設定され、これにより、弁体の閉弁着座時の速度を十分小さくできるので、着座の衝撃を小さくでき、衝突音を軽減できる。また、第2の制御目標位置をze2を、第1の制御目標位置ze1より小さく設定することで、閉弁着座後に弁体から切り離された可動子は、さらに閉弁用電磁石に近づけられた位置で電磁石と非接触に宙吊り状態で停止するように制御される(以下かかる制御を宙吊り制御という)。この場合、電磁吸引力は、電磁石に接近するほど急激に増大する特性を有するので、可動子を電磁石に接近した位置で停止させるほど、通電電流は小さくて済み、消費電力を節減できる。図11は、前記低速域で実行される2段宙吊り制御時の可動子位置の変化を示す。
【0064】
このようにすれば、低速域で前記2段宙吊り制御を行えば、可動子の着座音の発生を防止できると共に、弁体の着座音も極力小さくできるので、1段宙吊り制御を行なう場合に比較して、静粛性をより高めることができる。
【0065】
一方、中高速域では、1段宙吊り制御とすることで、閉弁に要する時間を短縮して応答性を確保することができる。
図12は、同上発明の第2の実施例のフローチャートを示し、低負荷域で2段宙吊り制御を行ない(ステップ41〜ステップ46)、中高負荷域で1段宙吊り制御を行なう(ステップ47〜ステップ49)。作用・効果は図10に示した第1の実施例と略同様である。
【0066】
図13は、同上発明の第3の実施例のフローチャートを示し、エンジンの回転速度Neと負荷Lとからマップ(図14参照)により検索される運転領域に基づいて切換制御を行なうものであり、低速・低負荷領域で2段宙吊り制御を行ない(ステップ51〜ステップ57)、中高速・中高負荷領域で1段宙吊り制御を行なう(ステップ58〜ステップ60)。作用・効果は図10,図12に示した第1,第2の実施例と略同様である。
【0067】
次に、前記宙吊り制御と着座制御とをエンジン運転状態に基づいて切り換え、さらに、該宙吊り制御をエンジン運転状態に基づいて1段宙吊り制御と2段宙吊り制御とに切り換える発明について説明する。個々の制御については、既述したとおりである。
【0068】
図15は、同上発明の第1の実施例のフローチャートを示し、エンジン回転速度Neのみに基づいて各制御の切り換えを行うようにしたものである。
すなわち、ステップ71でエンジン回転速度Neを検出し、ステップ72でエンジン回転速度Neが所定値N1未満か否かを判定し、所定値N1未満のときは、ステップ73でエンジン回転速度Neが所定値N2(<N1)未満か否かを判定し、所定値N2未満の極低速域(アイドル時など)と判定されたときは、ステップ74〜ステップ77へ進んで2段宙吊り制御を行なう。
【0069】
また、ステップ73でエンジン回転速度Neが所定値N2以上つまりN2≦Ne<N1の低速域と判定された場合は、ステップ78〜ステップ80へ進んで宙吊り制御(1段宙吊り制御)を行なう。
【0070】
また、ステップ72でエンジン回転速度Neが所定値N1以上の中高速域と判定されたときは、ステップ81、ステップ82へ進んで着座制御を行なう。
このようにすれば、静粛性を厳しく要求されるアイドル運転などの極低速域では、2段宙吊り制御を行なって弁体の着座音も極力小さくし、回転速度が増大するにしたがって、応答性及び出力を確保するべく1段宙吊り制御、着座制御へと段階的に切り換えることにより、各速度域により適した制御を行なうことができる。
【0071】
図16は、同上発明の第2の実施例のフローチャートを示し、エンジン負荷Lが所定値L2未満の極低負荷域で2段宙吊り制御を行ない(ステップ91〜ステップ97)、L2≦L<L1の低負荷域で1段宙吊り制御を行ない(ステップ98〜ステップ100)、L≧L1の中高負荷域で着座制御を行う(ステップ101,ステップ102)。作用・効果は図15に示した第1の実施例と略同様である。
【0072】
図17は、同上発明の第3の実施例のフローチャートを示し、エンジンの回転速度Neと負荷Lとからマップ(図18参照)により検索される運転領域に基づいて切換制御を行なうものであり、アイドル運転などの極低速・極負荷領域で2段宙吊り制御を行ない(ステップ110〜ステップ117)、低速・低負荷域で1段宙吊り制御を行ない(ステップ118〜ステップ120)、中高速・中高負荷領域で着座制御を行う(ステップ121,ステップ122)。作用・効果は図15,図16に示した第1,第2の実施例と略同様である。
【0073】
なお、本発明の制御は、速度目標関数rを上記のように2段階に切り換えることをせず、1つの速度目標関数rのみを持つものにおいても適用できる。
尚、本実施形態の変形例として、可動部速度センサ2に代えて可動部位置センサ3の出力信号を時間微分して速度信号を得る微分手段を用いても良いことは、明らかである。
【0074】
図19は、本発明に係る電磁駆動弁の制御装置の第2実施形態の構成を説明するブロック図である。本実施形態においては、第1実施形態の可動部速度センサ2に代えて、閉弁側電磁石11または開弁側電磁石12に通電される電流値を検出する電磁石電流センサ16と、可動子速度推定部(オブザーバ)17とを備えた制御装置15が用いられている。その他の構成は第1実施形態と同様である。この電磁石電流センサ16は、閉弁側電磁石電流制御部9または開弁側電磁石電流制御部10の出力電流を直列低抵抗により検出してもよいし、電磁石11,12の磁束を検出して電流に換算する形式でもよい。
【0075】
本実施形態の特徴は、可動部の速度を直接検出する代わりに、電磁石電流センサ16が検出した電磁石11,12の通電電流と、可動部位置センサ3が検出した可動部の位置とに基づいて、可動子速度推定部17が可動子の速度を推定することである。
【0076】
可動部の質量m、可動部に関わるバネ定数k、可動部に関わる粘性定数c、電磁力をFとすると、可動部の運動は、
【0077】
【数5】
と表される。
ここでf(x,i)は磁気回路の形状や材質などにより決まる関数であり、磁場解析などの手段によりあらかじめ知ることができる。γはバネ力のうち、オフセット荷重成分である。これらの式を元に、可動部の速度は直接可動部速度センサ2で検出する代わりに、位置xと電流iから以下の式を用いる可動子速度推定部17で推定することができる。
【0079】
【数6】
ここでは速度v(=) の推定値である。
推定された可動子の速度は、第1実施形態と同様に比較部5へ入力され、以下の処理内容は第1実施形態と同様であり、第1実施形態と同様の効果を得ることができる。
【図面の簡単な説明】
【図1】本発明が適用される電磁駆動弁の構成を示す概念図。
【図2】本発明に係る電磁駆動弁の制御装置の第1の実施形態の構成を示すブロック図。
【図3】同上実施形態における速度目標関数の生成法を説明する位置/速度位相面における可動部の軌跡を示すグラフ。
【図4】第1の発明における第1実施例を示すフローチャート。
【図5】可動子の着座制御時における可動子位置の変化を示す図。
【図6】可動子の宙吊り制御(1段宙吊り制御)時における可動子位置の変化を示す図。
【図7】第1の発明における第2実施例を示すフローチャート。
【図8】第1の発明における第3実施例を示すフローチャート。
【図9】同上第3実施例に使用されるマップ。
【図10】第2の発明における第1実施例を示すフローチャート。
【図11】可動子の2段宙吊り制御時における可動子位置の変化を示す図。
【図12】第2の発明における第2実施例を示すフローチャート。
【図13】第2の発明における第3実施例を示すフローチャート。
【図14】同上第3実施例に使用されるマップ。
【図15】第3の発明における第1実施例を示すフローチャート。
【図16】第3の発明における第2実施例を示すフローチャート。
【図17】第3の発明における第3実施例を示すフローチャート。
【図18】同上第3実施例に使用されるマップ。
同上実施形態における閉弁時の可動子位置の変化の第2の例を示す図。
【図19】本発明に係る電磁駆動弁の制御装置の第2の実施形態の構成を示すブロック図。
【符号の説明】
1 制御装置
2 可動部速度センサ
3 可動部位置センサ
4 比較部
5 速度目標値生成部
6 電流目標値生成部
7 切替器
9 閉弁側電磁石制御部
10 開弁側電磁石制御部
11 閉弁側電磁石
12 開弁側電磁石
Claims (5)
- エンジンの吸・排気弁に用いられ、電磁石と、該電磁石によりスプリングの反力に抗して駆動される可動子及び該可動子に連係して駆動される弁体を備え、前記可動子の位置を検出しつつ前記電磁石を通電制御する電磁駆動弁の制御装置であって、
前記可動子を前記電磁石に着座する直前の位置で停止させる制御と、前記可動子を前記電磁石に着座させる制御とを、エンジン運転状態に応じて切り換えることを特徴とする電磁駆動弁の制御装置。 - 前記可動子を前記電磁石に着座する直前の位置で停止させる制御は、前記可動子を前記電磁石に相対的に離れた位置で一旦停止させた後、最終的に前記電磁石に相対的に近い位置に停止させる2段制御と、1つの最終位置のみで停止させる制御とを、エンジン運転状態に応じて切り換えることを特徴とする請求項1に記載の電磁駆動弁の制御装置。
- エンジンの吸・排気弁に用いられ、電磁石と、該電磁石によりスプリングの反力に抗して駆動される可動子及び該可動子に連係して駆動される弁体を備え、前記可動子の位置を検出しつつ前記電磁石に着座する直前の位置で停止させるように通電制御する電磁駆動弁の制御装置であって、
前記可動子を前記電磁石に相対的に離れた位置で一旦停止させた後、最終的に前記電磁石に相対的に近い位置に停止させる2段制御と、1つの最終位置のみで停止させる制御とを、エンジン運転状態に応じて切り換えることを特徴とする電磁駆動弁の制御装置。 - 前記弁体と前記可動子とは、別体で構成され、閉弁時には、弁体が閉弁位置に着座した後、可動子が弁体から切り離されてさらに電磁石に近づけられるように制御されることを特徴とする請求項1〜請求項3のいずれか一つに記載の電磁駆動弁の制御装置。
- 前記各制御は、エンジンの回転速度、負荷の少なくとも一方に基づいて切り換えられることを特徴とする請求項1〜請求項4のいずれか一つに電磁駆動弁の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000013222A JP3671793B2 (ja) | 2000-01-21 | 2000-01-21 | 電磁駆動弁の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000013222A JP3671793B2 (ja) | 2000-01-21 | 2000-01-21 | 電磁駆動弁の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001207875A JP2001207875A (ja) | 2001-08-03 |
| JP3671793B2 true JP3671793B2 (ja) | 2005-07-13 |
Family
ID=18540839
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000013222A Expired - Fee Related JP3671793B2 (ja) | 2000-01-21 | 2000-01-21 | 電磁駆動弁の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3671793B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4055443B2 (ja) | 2002-03-11 | 2008-03-05 | トヨタ自動車株式会社 | 電磁駆動弁制御装置 |
| JP4147917B2 (ja) | 2002-11-28 | 2008-09-10 | トヨタ自動車株式会社 | 内燃機関の電磁駆動バルブ制御装置および電磁駆動バルブ制御方法 |
| JP4572794B2 (ja) * | 2005-10-04 | 2010-11-04 | 日産自動車株式会社 | 可変動弁機構の制御装置 |
-
2000
- 2000-01-21 JP JP2000013222A patent/JP3671793B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001207875A (ja) | 2001-08-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6925975B2 (en) | Controller for controlling an electromagnetic actuator | |
| JP4281246B2 (ja) | 機関バルブの駆動制御装置 | |
| JP3800896B2 (ja) | 電磁アクチュエータの制御装置 | |
| JP4803882B2 (ja) | 電磁アクチュエータ制御装置 | |
| JP3671793B2 (ja) | 電磁駆動弁の制御装置 | |
| JP3617414B2 (ja) | 電磁駆動弁の制御装置 | |
| JP2002151328A (ja) | 電磁バルブ装置の制御装置 | |
| JP4320885B2 (ja) | 電磁駆動弁の制御装置 | |
| JP3614092B2 (ja) | 電磁駆動弁のバルブクリアランス推定装置及び制御装置 | |
| JP3692888B2 (ja) | 電磁駆動弁の制御装置 | |
| JP4089614B2 (ja) | 電磁駆動弁の可変フィードバックゲイン通電制御方法 | |
| JPH11148327A (ja) | 電磁式弁駆動装置 | |
| JP2001221360A (ja) | 電磁駆動弁の制御装置 | |
| JP2004270452A (ja) | 吸排気バルブの駆動装置 | |
| JPH11132017A (ja) | 電磁駆動弁の制御装置 | |
| JP2002004896A (ja) | 電磁駆動弁の制御装置 | |
| JP2003314232A (ja) | 電磁駆動弁の初期駆動が位相制御された内燃機関 | |
| JPH1130114A (ja) | 電磁式弁駆動装置 | |
| JP2002364434A (ja) | 機関バルブの駆動制御装置 | |
| JP4238773B2 (ja) | 機関バルブの駆動制御装置 | |
| JPH10141028A (ja) | 内燃機関の電磁駆動弁機構 | |
| JPH1162530A (ja) | 電磁駆動弁 | |
| JP2001324046A (ja) | 電磁駆動弁の制御装置 | |
| JP2002054759A (ja) | 電磁駆動弁の制御装置 | |
| JP3627551B2 (ja) | 電磁駆動吸排気弁装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050329 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050411 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090428 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090428 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100428 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110428 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120428 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130428 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |