JP3577883B2 - 車両の操舵制御装置 - Google Patents
車両の操舵制御装置 Download PDFInfo
- Publication number
- JP3577883B2 JP3577883B2 JP8261697A JP8261697A JP3577883B2 JP 3577883 B2 JP3577883 B2 JP 3577883B2 JP 8261697 A JP8261697 A JP 8261697A JP 8261697 A JP8261697 A JP 8261697A JP 3577883 B2 JP3577883 B2 JP 3577883B2
- Authority
- JP
- Japan
- Prior art keywords
- steering control
- steering
- vehicle
- driver
- guideline
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
【発明の属する技術分野】
本発明は車両の操舵制御装置に関し、特に車両前方の走行路を認識し、この走行路から逸脱しないように操舵制御を行う車両の操舵制御装置に関する。
【0002】
【従来の技術】
従来から、車両を安定に走行させることを目的として、道路の白線等のガイドラインを認識して自車の走行路を認識し、この走行路から逸脱しないように操舵制御を行う車両の操舵制御装置が提案されている。
例えば、特開平6−255514号公報には、道路の白線を認識し、この白線認識情報に基づいて、安定走行ポテンシャルエネルギを白線の内側の走行レーン中央側では低く設定し、白線近傍では白線に近づくに従って高くなるよう設定し、安定走行ポテンシャルエネルギが高くなると安定走行ポテンシャルエネルギが低くなる側に車両を移動させるよう後輪の操舵制御を行うことが記載されている。
【0003】
【発明が解決しようとする課題】
従来装置はカメラの撮像画像から白線認識し、それに基づいて操舵制御を行うものであるが、操舵制御の開始時期及び終了時期については考慮がなされていない。つまり、運転者の意志が操舵制御に反映されていないという問題があった。
本発明は上記の点に鑑みなされたもので、運転者の操作及び車両の走行状態から判定することにより、運転者の意志及び操舵制御に適した走行状態で操舵制御を開始させる車両の操舵制御装置を提供することを目的とする。
【0004】
【課題を解決するための手段】
請求項1に記載の発明は、図1に示すように、車両の走行路上のガイドラインを認識するガイドライン認識手段M1を有し、前記ガイドラインの認識結果に基づいて走行路上の目標位置を設定し、この目標位置を走行するよう操舵制御手段M2で操舵制御を行う車両の操舵制御装置において、
操舵制御の開始の予備操作及び開始操作を運転者が行う操作手段M3と、
運転者の予備操作によりスタンバイスイッチがオンであり、かつ、運転者が操舵ハンドルを握ることによりハンドルタッチセンサがオンであり、かつ、車速が所定値以上であり、かつ、前記ガイドライン認識装置で走行路が認識できているとき、操舵制御の予備状態であると判定する予備判定手段M4と、
前記予備状態と判定され、かつ、運転者の操作によりセットスイッチがオンであり、かつ、操舵角が所定値以下で、かつ、前記ガイドライン認識装置で認識した道路の曲率半径が所定値以上であるとき操舵制御の開始状態であると判定して操舵制御を開始させる開始判定手段M5とを有する。
【0005】
このように、運転者が行う予備操作及びそのときの走行状態から操舵制御開始の予備状態かどうかを判定し、予備状態のときに開始操作及びそのときの走行状態から開始状態かどうかを判定して操舵制御を開始させるため、運転者に対して段階を踏んだ制御の開始を意識づけることで、運転者の意志に反した不用意な操舵制御の開始を防止できる。
【0006】
請求項2に記載の発明は、請求項1記載の車両の操舵制御装置において、
前記予備状態と判定されず、または、前記セットスイッチがオフであり、または、操舵角が所定値を超え、または、前記ガイドライン認識装置で認識した道路の曲率半径が所定値未満であるとき操舵制御を終了する状態と判定して操舵制御を終了させる終了判定手段を有する。
このように、車両の走行状態及び運転者の操作から操舵制御の終了を判定するため、運転者の操作を操舵制御より優先させることで運転者の意志を反映させることができる。
【0007】
【発明の実施の形態】
図2は本発明装置の一実施例の構成図を示す。
同図中、前輪操舵機構10は操舵ハンドル11を有しており、この操舵ハンドル11は操舵軸12を介してステアリングギヤボックス13内のピニオンギヤに接続されている。このピニオンギヤはラックバー14と噛合し、操舵ハンドル11の回転運動をラックバー14の往復運動に変換して伝達するものである。ラックバー14の両端には左右タイロッド15a,15b及び左右ナックルアーム16a,16bを介して左右前輪FW1,FW2が操舵可能に連結されている。
【0008】
後輪操舵機構20は後輪を操舵するためのアクチュエータとしてのブラシレスモータなどの電動モータ21を備えている。電動モータ21の回転軸はステアリングギヤボックス22内にて減速機構を介して軸方向に変位可能に支持されたリレーロッド23に接続されており、リレーロッド23は同モータ21の回転に応じて軸方向に変位する。減速機構の逆効率は小さく設定されていて、リレーロッド23側からの外部入力により電動モータ21が回転駆動されることがないようになっている。リレーロッド23の両端にはタイロッド24a,24b及びナックルアーム25a,25bを介して左右後輪RW1,RW2が接続されていて、左右後輪RW1,RW2はリレーロッド23の軸方向の変位に応じて操舵される。
【0009】
電子制御回路(ECU)30には前輪操舵角センサ32,後輪操舵角センサ34,車速センサ35,及びガイドライン認識装置36,操舵トルクセンサ41,ハンドルタッチセンサ42,スタンバイスイッチ43,セットスイッチ44,ウインカスイッチ45,ブレーキスイッチ46が接続されている。前輪操舵角センサ32は左右前輪FW1,FW2の操舵角を検出する。後輪操舵角センサ34は左右後輪RW1,RW2の操舵角を検出する。車速センサ35は自車の車速を検出する。操舵トルクセンサ41は操舵軸12に加わる操舵トルクを検出する。ハンドルタッチセンサ42は操舵ハンドル11を運転者が握っているかどうかを検出する。
【0010】
図3,図4夫々にハンドルタッチセンサの各実施例を示す。図3において、NPN形トランジスタTRのベースは操舵ハンドル11の裏面に設けられた導体と接続されている。トランジスタTRのエミッタは接地され、コレクタは抵抗R1を介して電源VCCに接続されると共に出力端子70に接続されている。運転者が操舵ハンドル11を握っていなければトランジスタTRがオフで端子70の出力レベルはハイレベル(オフ)である。運転者が操舵ハンドル11を握るとトランジスタTRのベースがハイレベルとなってトランジスタTRがオンし、端子70の出力レベルはローレベル(オン)となる。
【0011】
図4において、容量C1は操舵ハンドル12の静電容量である。この容量C1と共に容量C2,C3,C4でブリッジを構成し、接続点A1,A2間に直流電源Eを接続し、接続点B1,B2間に接続したリレーコイルL1に電流が流れないよう平衡させる。常開のリレースイッチRSWの両端は出力端子72a,72bに接続する。運転者が操舵ハンドル11を握っていなければリレーコイルL1に電流が流れないのでリレースイッチRSWは開成し端子72a,72b間は開放(オフ)される。運転者が操舵ハンドル11を握ると容量C1の静電容量が変化してブリッジの平衡が崩れ、リレーコイルL1に電流が流れリレースイッチRSWが閉成し、これによって端子72a,72b間は短絡(オン)される。
【0012】
操作手段M3としてのスタンバイスイッチ43は操舵制御を行う意志があるとき運転者によりオンとされるスイッチである。操作手段M3としてのセットスイッチ44は操舵制御を開始するとき運転者によりオンとされるスイッチである。ウインカスイッチ45は方向指示器を運転者が操作したときオンとなるスイッチである。ブレーキスイッチ46は運転者がブレーキを踏み込んだときにオンとなるスイッチである。
【0013】
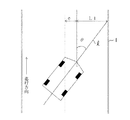
ガイドライン認識手段M1としてのガイドライン認識装置36は車両の進行方向前方の道路を撮像した道路画像をカメラ38から供給され、この道路画像を処理して道路の中央又は路側の白線や黄色の追越し禁止線等のガイドラインを認識し、このガイドラインに基づいて走行車線を認識し、図5に破線で示す走行路中央線からの車両オフセット量E(n)及び二重線で示すガイドラインIからの距離L1 を検出すると共に、走行路のカーブの曲率半径Rを検出する。ここで、θは画像から得た車両の走行路に対する傾き角、1は前方注視点距離(一定値)、eは現在横ずれ量であり、
E(n)=e+L1 ・・・ (1)
L1 ≒1×θ ・・・ (2)
と表わされる。上記の傾き角θ,現在横ずれ量e,車両オフセット量E(n)及び曲率半径RはECU30に供給される。
【0014】
ECU30は図6に示す如く、マイクロコンピュータで構成され、中央処理ユニット(CPU)50と、リードオンリメモリ(ROM)52と、ランダムアクセスメモリ(RAM)54と、入力ポート回路56と、出力ポート回路58と、通信回路60とを有し、これらは双方向性のコモンバス62により互いに接続されている。
【0015】
入力ポート回路56には前輪操舵角センサ32,後輪操舵角センサ34,車速センサ35,操舵トルクセンサ41,ハンドルタッチセンサ42夫々の出力する検出信号、及びスタンバイスイッチ43,セットスイッチ44,ウインカスイッチ45,ブレーキスイッチ46夫々の出力信号が供給される。また、通信回路60にはガイドライン認識装置36の出力する検出量θ,e,E(n),R夫々が供給される。
【0016】
ROM52には制御プログラムが記憶されている。CPU50は制御プログラムに基づき、後述する種々の演算を行い、その際にRAM54が作業領域として使用される。CPU50が制御プログラムを実行することにより発生した制御信号は出力ポート回路58から駆動回路40に供給され、この駆動回路40は電動モータ21を駆動して後輪RW1,RW2の操舵を行う。
【0017】
図7はCPU30が実行する予備判定手段M4としてのスタンバイ処理のフローチャートを示す。この処理は所定時間間隔で繰り返し実行される。同図中、ステップS10でスタンバイスイッチ43の出力がオンか否かを判別し、これがオフの場合は処理を終了する。オンの場合、つまり予備操作があった場合はステップS12に進み、ハンドルタッチセンサ42,車速センサ35,ガイドライン認識装置36夫々の出力を読み込む。
【0018】
次にステップS14でハンドルタッチセンサ42出力がオンで運転者が操舵ハンドル11を握っているか否かを判別し、操舵ハンドルを握っている場合にはステップS16に進み、握っていない場合はステップS22に進む。
ステップS16では検出された車速Vが所定速度V0 (例えば40km/h)以上か否かを判別し、V≧V0 の場合はステップS18に進み、V<V0 の場合はステップS22に進む。ステップS18ではガイドライン認識装置36で走行路の認識ができて、車両オフセット量E(n)が得られたかどうかを判別し、走行路認識ができた場合にはステップS20に進み、認識できなかった場合はステップS22に進む。
【0019】
つまり、スタンバイスイッチ43がオンとなって、運転者が操舵ハンドルを握っており、車速がV0 以上で、走行路を認識できている場合には予備状態であるとしてステップS20に進んでスタンバイフラグF1を1にセットし、これ以外の場合にはステップS22に進んでスタンバイフラグF1を0にリセットし、この後、処理を終了する。
【0020】
図8はECU30が実行する開始判定手段M5としてのセット処理のフローチャートを示す。この処理は所定時間間隔で繰り返し実行される。同図中、ステップS30でスタンバイフラグF1が1か否かを判別し、F1=1の場合はステップS32でセットスイッチ44がオンか否かを判別する。セットスイッチ44がオンの場合、つまり開始操作があった場合はステップS34に進み、セットスイッチがオフの場合、又はF1=0の場合は処理を終了する。
【0021】
ステップS34では前輪操舵角センサ32出力の操舵角θs及びガイドライン認識装置36出力の道路の曲率半径R(カーブR)を読み込む。次にステップS36で操舵角θsの絶対値が所定値θ0 (例えば20°)以下か否かを判別し、|θs|≦θ0 の場合はステップS38に進み、|θs|>θ0 の場合はステップS42に進む。ステップS38ではカーブRが所定値R0 (例えば200m)以上か否かを判別し、R≧R0 の場合はステップS40に進み、R<R0 の場合はステップS42に進む。
【0022】
つまり、F1=1でセットスイッチ44がオンであり、操舵角θsがθ0 以下で小さく、かつ、カーブRがR0 以上であるとき開始状態であるとしてステップS40に進んでセットフラグF2を1にセットし、これ以下の場合にはステップS42でセットフラグF2を0にリセットし、この後、処理を終了する。
図9はECU30が実行する操舵制御手段M2としての操舵制御処理のフローチャートを示す。この処理は所定時間間隔で繰り返し実行される。同図中、ステップS50でセットフラグF2が1か否かを判別し、F2=1でなければ処理を終了する。F2=1のときはステップS52に進み、ガイドライン認識装置36出力の車両オフセット量E(n)を読み込む。次にステップS54で次式により後輪操舵制御量D(n)を算出する。
【0023】
D(n)=D(n−1)+K・{E(n)−E(n−1)} ・・・ (3)
但し、D(n−1)は前回の後輪操舵制御量であり、E(n−1)は前回の車両オフセット量であり、K1は後輪制御ゲイン(一定値)である。この後、ステップS56で上記の後輪操舵制御量D(n)を実際の後輪操舵制御量Dにセットし、ステップS58で実際の後輪操舵制御量Dに基づいて駆動回路40を駆動する。これによって電動モータ21が回転駆動されて、後輪RW1,RW2の操舵が行われる。この後、処理を終了する。
【0024】
図9はECU30が実行する終了判定手段としてのリセット処理のフローチャートを示す。この処理は所定時間間隔で繰り返し実行される。同図中、ステップS60でセットフラグF2が1か否かを判別し、これがF2=1でない場合は処理を終了する。F2=1の場合はステップS62に進み、ハンドルタッチセンサ42出力を読み込んで、これがオンで運転者が操舵ハンドル11を握っているか否かを判別し、操舵ハンドルを握っている場合にはステップS64に進み、握っていない場合はステップS74に進む。ステップS64では検出された車速Vが所定速度V0 (例えば40km/h)以上か否かを判別し、V≧V0 の場合はステップS66に進み、V<V0 の場合にはステップS74に進む。ステップS66ではガイドライン認識装置36で走行路の認識ができて、車両オフセット量E(n)が得られたかどうかを判別し走行路認識ができた場合にはステップS68に進み、認識できなかった場合はステップS74に進む。
【0025】
つまり、スタンバイスイッチ43がオンとなって、運転者が操舵ハンドルを握っており、車速がV0 以上で、走行路を認識できている場合にはステップS68に進み、これ以外の場合にはステップS74に進んでセットフラグF2を0にリセットし、処理を終了する。
ステップS68ではブレーキスイッチ46がオンでブレーキが踏まれたか否かを判別し、ブレーキスイッチがオンならばステップS74に進み、これがオフならばステップS70に進む。ステップS70では操舵角センサ32出力の操舵角θsを読み込んで、θsの絶対値が所定値θ1 (例えば40°)以上か否か、また操舵角θsの微分値dθsが所定値dθ1 (例えば200deg/sec )以上か否か、また操舵トルクセンサ41から読み込んだ操舵トルクTが所定値T1以上か否かを判別する。ここで、|θs|≧θ1 又はdθs≧dθ1 又はT≧T1の場合は運転者が操舵を行ったと判定してステップS74に進み、それ以外の場合はステップS72に進む。ステップS72ではウインカスイッチ45の出力を読み込んで、これがオンか否かを判別し、オフならば処理を終了する。これがオンの場合は運転者が操舵しようとしているためステップS74に進む。つまり、運転者が操舵を行った場合、又は操舵しようとした場合はステップS74に進んでセットフラグF2を0にリセットし、処理を終了する。
【0026】
このように、運転者が行う予備操作及びそのときの走行状態から操舵制御開始の予備状態かどうかを判定し、予備状態のときに開始操作及びそのときの走行状態から開始状態かどうかを判定して操舵制御を開始させるため、運転者に対して段階を踏んだ制御の開始を意識づけることで、運転者の意志に反した不用意な操舵制御の開始を防止できる。
【0027】
また、車両の走行状態及び運転者の操作から操舵制御の終了を判定するため、運転者の操作を操舵制御より優先させることで運転者の意志を反映させることができる。
なお、上記実施例ではガイドライン認識装置36で走行路の曲率半径Rを検出しているが、その他に前輪操舵角やヨーレートから曲率半径Rを求めても良く、更にはナビゲーションシステムの地図情報から曲率半径を得ても良い。また、後輪を操舵制御する代りに前輪又は前輪と後輪を操舵制御するものであっても良く、上記実施例に限定されない。
【0028】
【発明の効果】
上述の如く、請求項1に記載の発明は、車両の走行路上のガイドラインを認識するガイドライン認識手段を有し、前記ガイドラインの認識結果に基づいて走行路上の目標位置を設定し、この目標位置を走行するよう操舵制御を行う車両の操舵制御装置において、
操舵制御の開始の予備操作及び開始操作を運転者が行う操作手段と、
運転者の予備操作によりスタンバイスイッチがオンであり、かつ、運転者が操舵ハンドルを握ることによりハンドルタッチセンサがオンであり、かつ、車速が所定値以上であり、かつ、前記ガイドライン認識装置で走行路が認識できているとき、操舵制御の予備状態であると判定する予備判定手段と、
前記予備状態と判定され、かつ、運転者の操作によりセットスイッチがオンであり、かつ、操舵角が所定値以下で、かつ、前記ガイドライン認識装置で認識した道路の曲率半径が所定値以上であるとき操舵制御の開始状態であると判定して操舵制御を開始させる開始判定手段とを有する。
【0029】
このように、運転者が行う予備操作及びそのときの走行状態から操舵制御開始の予備状態かどうかを判定し、予備状態のときに開始操作及びそのときの走行状態から開始状態かどうかを判定して操舵制御を開始させるため、運転者に対して段階を踏んだ制御の開始を意識づけることで、運転者の意志に反した不用意な操舵制御の開始を防止できる。
【0030】
また、請求項2に記載の発明は、請求項1記載の車両の操舵制御装置において、
前記予備状態と判定されず、または、前記セットスイッチがオフであり、または、操舵角が所定値を超え、または、前記ガイドライン認識装置で認識した道路の曲率半径が所定値未満であるとき操舵制御を終了する状態と判定して操舵制御を終了させる終了判定手段を有する。
このように、車両の走行状態及び運転者の操作から操舵制御の終了を判定するため、運転者の操作を操舵制御より優先させることで運転者の意志を反映させることができる。
【図面の簡単な説明】
【図1】本発明の原理図である。
【図2】本発明装置の構成図である。
【図3】ハンドルタッチセンサを説明するための図である。
【図4】ハンドルタッチセンサを説明するための図である。
【図5】車両オフセット量を説明するための図である。
【図6】ECUのブロック図である。
【図7】スタンバイ処理のフローチャートである。
【図8】セット処理のフローチャートである。
【図9】操舵制御処理のフローチャートである。
【図10】リセット処理のフローチャートである。
【符号の説明】
10 前輪操舵機構
11 操舵ハンドル
12 操舵軸
13,22 ステアリングギヤボックス
14 ラックバー
15a,15b,24a,24b タイロッド
16a,16b,25a,25b ナックルアーム
20 後輪操舵機構
21 電動モータ
23 リレーロッド
30 ECU
32 前輪操舵角センサ
34 後輪操舵角センサ
35 車速センサ
36 ガイドライン認識装置
38 カメラ
40 駆動回路
M1 ガイドライン認識手段
M2 操舵制御手段
M3 操作手段
M4 予備判定手段
M5 開始判定手段
Claims (2)
- 車両の走行路上のガイドラインを認識するガイドライン認識手段を有し、前記ガイドラインの認識結果に基づいて走行路上の目標位置を設定し、この目標位置を走行するよう操舵制御を行う車両の操舵制御装置において、
操舵制御の開始の予備操作及び開始操作を運転者が行う操作手段と、
運転者の予備操作によりスタンバイスイッチがオンであり、かつ、運転者が操舵ハンドルを握ることによりハンドルタッチセンサがオンであり、かつ、車速が所定値以上であり、かつ、前記ガイドライン認識装置で走行路が認識できているとき、操舵制御の予備状態であると判定する予備判定手段と、
前記予備状態と判定され、かつ、運転者の操作によりセットスイッチがオンであり、かつ、操舵角が所定値以下で、かつ、前記ガイドライン認識装置で認識した道路の曲率半径が所定値以上であるとき操舵制御の開始状態であると判定して操舵制御を開始させる開始判定手段とを有することを特徴とする車両の操舵制御装置。 - 請求項1記載の車両の操舵制御装置において、
前記予備状態と判定されず、または、前記セットスイッチがオフであり、または、操舵角が所定値を超え、または、前記ガイドライン認識装置で認識した道路の曲率半径が所定値未満であるとき操舵制御を終了する状態と判定して操舵制御を終了させる終了判定手段を有することを特徴とする車両の操舵制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP8261697A JP3577883B2 (ja) | 1997-04-01 | 1997-04-01 | 車両の操舵制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP8261697A JP3577883B2 (ja) | 1997-04-01 | 1997-04-01 | 車両の操舵制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10278823A JPH10278823A (ja) | 1998-10-20 |
| JP3577883B2 true JP3577883B2 (ja) | 2004-10-20 |
Family
ID=13779411
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP8261697A Expired - Fee Related JP3577883B2 (ja) | 1997-04-01 | 1997-04-01 | 車両の操舵制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3577883B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3785837B2 (ja) * | 1998-12-04 | 2006-06-14 | 日産自動車株式会社 | 車両用走行制御装置 |
| JP2002079953A (ja) * | 2000-09-06 | 2002-03-19 | Nissan Motor Co Ltd | 車線追従制御装置 |
| JP4835309B2 (ja) * | 2006-07-31 | 2011-12-14 | 日産自動車株式会社 | 車線逸脱防止装置 |
| JP5547607B2 (ja) | 2010-10-29 | 2014-07-16 | アイシン精機株式会社 | 車両の横方向運動制御装置 |
| JP2012232704A (ja) * | 2011-05-09 | 2012-11-29 | Jtekt Corp | 車両用操舵装置 |
| JP6304075B2 (ja) * | 2015-03-04 | 2018-04-04 | トヨタ自動車株式会社 | 故障判定装置 |
| JP6631802B2 (ja) * | 2016-09-30 | 2020-01-15 | トヨタ自動車株式会社 | 把持状態判定装置 |
-
1997
- 1997-04-01 JP JP8261697A patent/JP3577883B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10278823A (ja) | 1998-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1862374B1 (en) | Steering control device for vehicles | |
| KR100486004B1 (ko) | 차량용헤드램프장치 | |
| JP3367355B2 (ja) | 車両の操舵制御装置 | |
| JP4411514B2 (ja) | 電動パワーステアリング装置 | |
| JP3185726B2 (ja) | 車両用操舵制御装置 | |
| JP3882318B2 (ja) | 車両の操舵制御装置 | |
| JP2002012159A (ja) | 車輌用自動操舵装置 | |
| JP2008044427A (ja) | 車両の操舵制御装置 | |
| JP2004256068A (ja) | 電動パワーステアリング装置 | |
| JP3577883B2 (ja) | 車両の操舵制御装置 | |
| JP3166635B2 (ja) | 車両の操舵制御装置 | |
| JP3255052B2 (ja) | 車両の操舵制御装置 | |
| JP3598720B2 (ja) | 車両の操舵制御装置 | |
| JP6774315B2 (ja) | 車両の操舵装置 | |
| JP7032967B2 (ja) | 車両の操舵支援装置 | |
| JP2010158987A (ja) | 車両用転舵制御装置 | |
| JP3575206B2 (ja) | 車両の操舵制御装置 | |
| JP3577864B2 (ja) | 車両の操舵制御装置 | |
| JPH1129061A (ja) | 車両の操舵制御装置 | |
| JP5082237B2 (ja) | 車両用操舵支援装置 | |
| JPH1199955A (ja) | 電動パワーステアリング装置 | |
| JP3572870B2 (ja) | 車両の操舵制御装置 | |
| JPH0549512B2 (ja) | ||
| JPH10167098A (ja) | 車両の操舵制御装置 | |
| WO2024062565A1 (ja) | 運転支援方法及び運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040330 |
|
| A521 | Written amendment |
Effective date: 20040524 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Effective date: 20040622 Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040705 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080723 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 4 Free format text: PAYMENT UNTIL: 20080723 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 5 Free format text: PAYMENT UNTIL: 20090723 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 5 Free format text: PAYMENT UNTIL: 20090723 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 6 Free format text: PAYMENT UNTIL: 20100723 |
|
| LAPS | Cancellation because of no payment of annual fees |