JP3554516B2 - シューティングゲーム用の装置、位置検出用の装置及び情報記憶媒体 - Google Patents
シューティングゲーム用の装置、位置検出用の装置及び情報記憶媒体 Download PDFInfo
- Publication number
- JP3554516B2 JP3554516B2 JP2000011970A JP2000011970A JP3554516B2 JP 3554516 B2 JP3554516 B2 JP 3554516B2 JP 2000011970 A JP2000011970 A JP 2000011970A JP 2000011970 A JP2000011970 A JP 2000011970A JP 3554516 B2 JP3554516 B2 JP 3554516B2
- Authority
- JP
- Japan
- Prior art keywords
- position detection
- area
- detection area
- spot light
- dividing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Landscapes
- Aiming, Guidance, Guns With A Light Source, Armor, Camouflage, And Targets (AREA)
- Position Input By Displaying (AREA)
- User Interface Of Digital Computer (AREA)
Description
【発明の属する技術分野】
本発明は、シューティングゲーム用の装置、位置検出用の装置及び情報記憶媒体に関する。
【0002】
【背景技術及び発明が解決しようとする課題】
従来、所定の標的が登場するゲーム画面を、プレーヤが光線銃等を用いて射撃するシューティングゲーム装置が知られている。このような従来技術は、ゲーム画面をビデオカメラで撮像し、このビデオカメラから出力される映像信号に基づき光線銃の着弾位置を検出し、命中、はずれの判定を行う。
【0003】
このようなゲーム装置では、前記ビデオカメラが、ゲーム画面を所定のあおり角をもって撮像するため、撮像画像中に含まれるゲーム画面の画像は歪んでしまい、実際のゲーム画面の座標と、撮像画面中に含まれるゲーム画像の座標との対応関係をとることが難しい。このため、撮像画像中に含まれる着弾位置の画像から、正確な着弾位置検出を、CPUに過大な負担をかけることなく正確に行うことができないという問題があった。
【0004】
本発明は、このような課題に鑑みがなされたものであり、その目的は、画像表示エリアに含まれる位置検出エリアに投射されるスポット光の位置を、撮像手段の撮像信号に基づき正確に検出することが可能なシューティングゲーム用の装置、位置検出用の装置及び情報記憶媒体を提供することにある。
【0005】
【課題を解決するための手段】
(1)前記目的を達成するため、本発明は、
画像表示エリアにシューティングディバイスから投射されるスポット光の着弾位置検出を、画像表示エリアの位置検出エリアを撮像する撮像手段の撮像信号に基づき行なうシューティングゲーム用の装置であって、
前記撮像手段の撮像エリアに含まれる位置検出エリアをM×Nブロックのマトリクスに分割するための情報が記憶された記憶手段と、
前記撮像信号に基づき、スポット光が存在する前記分割マトリクスのブロックを特定するとともに、特定されたブロック内における前記スポット光の位置検出を行い、前記位置検出エリアにおけるスポット光の着弾位置検出を行う位置検出手段と、
を含む。
【0006】
また、本発明は、
画像表示エリアに投射されるスポット光の位置検出を、画像表示エリアの位置検出エリアを撮像する撮像手段の撮像信号に基づき行なう位置検出用の装置であって、
前記撮像手段の撮像エリアに含まれる位置検出エリアをM×Nブロックのマトリクスに分割するための情報が記憶された記憶手段と、
前記撮像信号に基づき、スポット光が存在する前記分割マトリクスのブロックを特定するとともに、特定されたブロック内における前記スポット光の位置検出を行い、前記位置検出エリアにおけるスポット光の着弾位置検出を行う位置検出手段と、
を含む。
【0007】
さらに、本発明に係るコンピュータ読み取り可能またはコンピュータ利用可能な情報記憶媒体に記憶されるプログラムは、
画像表示エリアにシューティングディバイスから投射されるスポット光の着弾位置検出を、画像表示エリアの位置検出エリアを撮像する撮像手段の撮像信号に基づき行ない、シューティングゲームを行うための処理をコンピュータに実行させるためのプログラムであって、
前記撮像手段の撮像エリアに含まれる位置検出エリアをM×Nブロックのマトリクスに分割するための手段と、
前記撮像信号に基づき、スポット光が存在する前記分割マトリクスのブロックを特定するとともに、特定されたブロック内における前記スポット光の位置検出を行い、前記位置検出エリアにおけるスポット光の着弾位置検出を行う位置検出手段と、
としてコンピュータを機能させるプログラムであることを特徴とする。
【0008】
さらに、本発明に係るコンピュータ読み取り可能、または利用可能な情報記憶媒体に記憶されるプログラムは、
画像表示エリアに投射されるスポット光の位置検出を、画像表示エリアの位置検出エリアを撮像する撮像手段の撮像信号に基づき行なうための処理をコンピュータに実行させるためのプログラムであって、
前記撮像手段の撮像エリアに含まれる位置検出示エリアをM×Nブロックのマトリクスに分割するための手段と、
前記撮像信号に基づき、スポット光が存在する前記分割マトリクスのブロックを特定するとともに、特定されたブロック内における前記スポット光の位置検出を行い、前記位置検出エリアにおけるスポット光の位置検出を行う位置検出手段と、
としてコンピュータを機能させるプログラムであることを特徴とする。
【0009】
ここにおいて、前記スポット光としては、通常の可視光を用いてもよく、また表示画像と分離可能な波長帯域の光、例えば赤外光を用いてもよい。通常の画像と分離可能な帯域の光をスポット光として用いた場合には、前記撮像手段は、前記スポット光の帯域の光のみを選択的に撮像する撮像手段として形成することが好ましく、例えばスポット光として赤外光を用いた場合には、赤外光のみを撮像する撮像手段を用いることが好ましい。これにより、表示画像からスポット光のみを分離して撮像し、その位置検出を行うことが可能となる。
【0010】
本発明を用いて、例えばシューティングのゲームやシミュレーションを行う場合に、シューティングディバイスから発射される光線は画像表示エリアにスポット光として表示される。このスポット光の着弾位置は、画像表示エリアの位置検出エリアを撮像する撮像手段の撮像信号に基づき検出される。
【0011】
本発明によれば、撮像エリアに含まれる位置検出エリアをM×Nブロックのマトリクスに分割し、撮像信号に基づくスポット光の検出位置がどのブロック内に存在するかを特定するとともに、特定されたブロック内におけるスポット光の位置検出を行い、これにより、前記位置検出エリアにおけるスポット光の位置検出を行う構成を採用する。
【0012】
以上の構成を採用することにより、画像表示エリアが歪んだ画像として撮像される場合であっても、この画像表示エリアに投射されるスポット光の位置検出を、CPUに負担をかけることなく、簡単な処理で正確に行うことが可能となる。
【0013】
(2)本発明において、
前記マトリクスを構成するM×Nの各ブロックには予め位置検出エリアに対応した座標情報が与えられ、
前記位置検出手段は、
前記特定されたブロックの座標情報と、特定ブロック内における前記スポット光の位置検出情報とに基づき、前記位置検出エリアにおけるスポット光の着弾位置検出を行うことが好ましい。
【0014】
このように、マトリクスを構成する各ブロックに座標情報を与えておくことにより、スポット光の存在するブロックの座標情報と、この特定ブロック内におけるスポット光の位置検出情報に基づき、スポット光の位置検出をより簡単な処理で正確に行うことが可能となる。
【0015】
(3)本発明において、
前記記憶手段には、
前記位置検出エリアの相対向する1組の辺に設定された(M−1)個の内分点を互いに交叉しないように結ぶ第1の分割線群と、他の1組の辺に設定された(N−1)個の内分点を互いに交叉しないように結ぶ第2の分割線群とにより、前記位置検出エリアをM×Nブロックのマトリクスに分割するための情報が記憶されように形成することが好ましい。
【0016】
また、本発明において、
前記記憶手段には、
画像表示エリアに含まれる位置検出エリアの中心位置に対応した撮像エリア内の位置を中点位置として特定するための情報が記憶されるとともに、
前記検出された位置検出エリアの相対向する1組の辺に(M−1)個(Mは偶数)の内分点を設定し、他の1組の辺に(N−1)個(Nは偶数)の内分点を設定し、
前記1組の辺の中央の内分点間を前記中点位置を介して結ぶ第1の中心多次曲線に(N−1)個の内分点を設定するとともに、前記他の1組の辺の中央の内分点間を前記中点位置を介して結ぶ第2の中心多次曲線に(M−1)個の内分点を設定し、
前記1組の辺の内分点間を、前記第2の中心多次曲線の対応する内分点を介して互いに交叉しないように多次の曲線で結ぶ第1の分割線群と、前記他の1組の辺の内分点間を、前記第1の中心多次曲線の対応する内分点を介して互いに交叉しないように多次の曲線で結ぶ第2の分割線群と、により、前記位置検出エリアをM×Nブロックのマトリクスに分割するための情報が記憶されることがより好ましい。
【0017】
以上の構成を採用することにより、実際の位置検出エリアをM×Nブロックのマトリクスに均等に分割した場合の状況をより正確に反映するように、撮像手段の撮像エリアに含まれる位置検出エリアをM×Nブロックのマトリクスに分割することができ、これにより、さらに正確なスポット光の位置検出を行うことができる。
【0018】
(4)本発明において、
前記位置検出エリアは、
実際の表示画像エリアに含まれるシューティングエリアとして与えられるように設定することが好ましい。
【0019】
また、前記各請求項の発明において、
前記シューティング用ゲームを行うための情報に代え、シューティング用のシミュレーションを行うための情報を記憶するように形成してもよい。
【0020】
本発明において、情報記憶媒体に記憶される情報としては、前記各手段を実現するためのプログラムや、データを内包したプログラムであってもよく、またプログラムとデータの組合せであってもよい。また、前記各手段を実行するための情報(例えばプログラム)は、コンピュータにより使用可能な情報(例えばプログラム等)であって、上記手段を実現(実行)するための処理ルーチンを含むものであってもよい。
【0021】
また、記撮像手段は、実際の表示画像エリアに含まれる位置検出エリアを通過又は反射したスポット光が形成されるスポット光形成エリアを、前記位置検出エリアに替えて撮像するように形成してもよい。
【0022】
(5)また、撮像エリアに含まれる画像表示エリアの位置検出エリアを特定する処理は、例えば以下のようにして行えばよい。
【0023】
すなわち、画像表示エリアの位置検出エリアを撮像する赤外線撮像手段(又は赤外線以外の非可視光を撮像する手段)の撮像信号に基づき、前記赤外線撮像手段の撮像エリアに含まれる画像表示エリアの位置検出エリアを特定するための特定手段を設け、
この特定手段は、
前記表示画像エリアに、前記位置検出エリアの四隅を特定するための少なくとも4つのコーナ用基準点に基準点マークを表示するとともに、
前記マークを狙って前記赤外線(または赤外線以外の非可視光)を投射することにより得られたスポット光の撮像エリア内での位置検出を、前記撮像手段の撮像信号に基づき行ない、
前記スポット光の検出により特定される撮像エリア内の前記4つのコーナ用基準点を頂点とする4角形各辺の中心点に対し、所与のルールに従ったオフセット値を与えることにより、前記撮像エリアに含まれる位置検出エリアを特定する。
【0024】
前記4つのコーナ用基準点は、
実際の位置検出エリアを縮小または拡大した4角形の四隅の点として与えられ、
前記スポット光の検出により特定される前記4角形に対応したエリアを、所与の倍率で拡大又は縮小することにより、前記撮像エリアに含まれる位置検出エリアを特定することが好ましい。
【0025】
このようにすることにより、例えば位置検出エリアが、表示画像エリアとほぼ一致する場合には、これを縮小した4角形の四隅を点として前記各コーナー用基準点を徹底し基準点マークを表示することにより、基準点マークを表示画像エリア内に余裕をもって表示することが可能となる。
【0026】
また、前記検出エリアは、
実際の表示画像エリアに含まれるシューティングエリアとして与えられ、
前記4つのコーナ用基準点は、
前記シューティングエリアの四隅の点として与えられ、
前記スポット光の検出により特定されるエリアを、前記撮像エリアに含まれる位置検出エリアとして特定することが好ましい。
【0027】
以上の構成とすることにより、画像表示エリア内の一部の領域がシューティングエリアとして設定されている場合に、スポット光の検出により前記撮像エリアに含まれるシューティングエリアを検出し、位置検出エリアの特定に、検出エリアの拡大または縮小処理を行う必要がない、このため、位置検出エリアの特定を簡単な処理で行うことが可能となる。
【0028】
【発明の実施の形態】
次に、本発明の実施の形態を図面に基づき詳細に説明する。
【0029】
(1)全体説明
図1には、本発明が適用されたシューティング用シミュレータの第1の実施の形態の概略構成が示されている。
【0030】
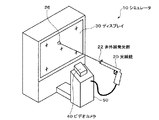
本発明のシミュレータ10は、シューティングゲームを行うゲーム装置として形成されており、照準方向に赤外線ビームを発射するシューティングディバイスとしての光線銃20と、シューティング用のゲーム画面を表示するディスプレイ30と、前記ゲーム画面を撮像する赤外線ビデオカメラ40と、ゲーム装置本体50とを有する。
【0031】
前記ディスプレイ30に表示されるシューティング用ゲーム画面には、標的画像、背景画像、命中演出画像等の種々の画像が含まれる。
【0032】
図3には、本実施の形態のシミュレータの概略斜視図が示されている。光線銃20は、ゲーム装置本体50に接続され、光線銃20の先端に設けられた赤外線発光部(例えば赤外線LED)22からその照準方向に赤外線ビームが投射され、ディスプレイ30上に赤外線のスポット光26を投射する。
【0033】
ビデオカメラ40は、赤外線撮像手段に相当し、ディスプレイ30上に表示される画像、特にその位置検出エリアを撮像する。ここでは、ディスプレイ30を、その下側から所定のあおり角をもって撮像するように、赤外線ビデオカメラ40が設置されている。
【0034】
ゲーム装置本体50は、シミュレータ10の各種の制御及び処理を行う。
【0035】
図2には、このゲーム装置本体の機能を実現するための概略構成を示すブロック図が示されている。
【0036】
図2において、ゲーム装置本体50は、処理部100と、RAM140と、ROM150と、画像生成部160と、音生成部170と、音出力部180と、コントロール部200を有する。
【0037】
処理部100は、装置全体の制御、装置内の各ブロックへの命令の指示、ゲーム演算の各種の処理を行うものであり、その機能は、CPU(CISC型、RISC型)、DSP、ASIC(ゲートアレイ等)等のハードウエアや所与のプログラム(ゲームプログラム)により実現できる。
【0038】
RAM140は、処理部100、画像生成部160、音生成部170、コントロール部200のワーク領域となるものである。
【0039】
コンピュータにより情報の読み取り可能、コンピュータが利用可能な情報記憶媒体であるROM150は、各種のプログラム、データ等の情報を記憶するものである。本実施の形態においては、シューティングゲームを行うための情報が格納されている。このシューティングゲームを行うための情報には、少なくとも、処理部100をゲーム演算部110として機能させ、コントロール部200を位置検出エリア特定部212、位置検出部210として機能させるための情報が記憶されるとともに、RAM140を、後述するようにビデオカメラ40の撮像エリアに含まれる位置検出エリアを複数のマトリクスに分割するための情報が記憶される手段として機能させるための情報が記憶されている。シューティングゲーム用画像データ、シューティングゲーム用音声データ、前述以外に必要となるシューティングゲーム実行プログラム、命中判定プログラム、演算プログラム等も、シューティングゲームを行うための情報としてROM150に記憶されている。
【0040】
画像生成部160は、処理部100からの指示等に従って、各種の画像を生成してディスプレイ30に表示させるためのものであり、その機能は、画像生成用ASIC、CPU、DSP等のハードウエアや、所与のプログラム(画像生成プログラム)、画像データにより実現できる。画像生成部160で生成された画像は、ディスプレイ30上に表示される。
【0041】
音生成部170は、処理部100からの指示等に従って、各種の音を生成し音出力部180に出力するものであり、その機能は、音生成ASIC、CPU、DSP等のハードウエアや、所与のプログラム(音生成プログラム)、音声データ(波形データ)により実現できる。
【0042】
前記コントロール部200は、前記カメラ40、光線銃20の制御や、これらとの間の情報の授受を行うものであり、位置検出部210、位置検出エリア特定部212、銃制御部214としても機能するように構成されており、その機能は、例えばCPU、ROM、RAM及び所与のプログラム、データなどにより実現できる。
【0043】
(2)撮像エリアに含まれる位置検出エリアの特定
前記位置検出エリア特定部212は、ROM150又はコントロール部200に設けられたROMに格納された情報(プログラム等)に従い、ビデオカメラ40の撮像エリアに含まれる画像表示エリアの位置検出エリアを特定する処理を行う。
【0044】
すなわち、前記ビデオカメラ40は、図3に示すようにディスプレイ30を、その下方から所定のあおり角をもって撮像する。このため、ビデオカメラ40の撮像エリアに含まれる、ディスプレイ30の表示領域は、図4(A)に示すように歪んだ形で撮像されることになる。ここにおいて、2000Bは、ディスプレイ30の画像表示エリアを表す。
【0045】
従って、光線銃20から発射された光ビームを形成するスポット光26の、ディスプレイ30上における着弾位置を検出するためには、ディスプレイ30上に表示される画像表示エリア2000Bの座標位置と、ビデオカメラ40の撮像エリアの座標との対応関係を設定してやることが必要となる。
【0046】
特に、本実施の形態では、ディスプレイ30上に表示されるゲーム画像と、この画像表示エリア2000A上に表示される赤外線スポット光26とを分離して撮像するために、ビデオカメラ40には赤外線透過フィルタが設けられており、ビデオカメラ40は赤外線撮像手段として機能するように形成されている。このために、ビデオカメラ40では、ディスプレイ30上に表示されるゲーム画像は撮像することができず、赤外線スポット光26しか撮像することができない。従って、ビデオカメラ40の撮像エリアのうち、どの領域が画像表示エリア2000Bであり、位置検出エリア2100Bであるかを、位置検出エリア特定部212に予め認識させてやることが必要となる。
【0047】
本実施の形態では、画像表示エリア2000B全域が、光線銃20によるシューティングエリアとなるため、画像表示エリア2000Bと、着弾位置を検出すべき位置検出エリア2100Bとが一致する。なお、画像表示エリア2000Bのある領域のみがシューティングエリアとなる場合には、その領域のみを位置検出エリア2100Bとしてコントロール部200に認識させてやればよい。
【0048】
位置検出エリア特定部212は、このようにして、コントロール部200に対して、ゲーム開始に先立ってディスプレイ30上に表示される位置検出エリア2100Bを正確に認識させかつ特定させるための処理を行う。
【0049】
ここで、位置検出エリア特定部212が実行する特徴的な処理の例を図13のフローチャートに示す。
【0050】
ステップS10において、図5に示すように、画像表示エリア2000A上の、位置検出エリア2100A(本実施の形態では2000Aと一致)の四隅を特定するための少なくとも4つのコーナー用基準点P0、P2、P6、P8に+印の基準点マークM0、M2、M6、M8を表示するとともに、位置検出エリア2100Aの中心位置を特定するための中心基準点P4に、+印の基準点マークM0を表示する。ここでは、位置検出エリア2100Aは矩形形状をしているため、このエリア2100Aを特定するための基準点P0、P2、P6、P8を四隅とする仮想4角形2200Aの形状も、前記位置検出エリア2100Aを縦横方向にそれぞれ所与の倍率で縮小した矩形形状となる。さらに、前記中心基準点P4は、仮想4角形2200Aの相対向する辺の各中点を結ぶ直線の交点上に位置するように設定される。
【0051】
そして、前記中心基準点P4には、位置検出エリア2100Aの基準位置(ここでは中央位置)の座標を特定するための情報が対応付けられており、さらに仮想4角形2200Aの四隅を特定する基準点P0、P2、P6、P8には、中心点P4との関係において位置検出エリア2100Aの各コーナー部を特定するための座標情報が与えられている。ここでは、仮想4角形2200Aを所与の倍率で縦方向、横方向に拡大し、そのコーナー部が位置検出エリア2100Aのコーナー部と一致したときにおける、位置検出エリア2100A上における座標情報が与えられている。
【0052】
このように、実際の位置検出エリア2100Aに比べ、前記位置検出エリア2100Aの各コーナー部を特定する基準点P0、P2、P6、P8で結ぶ仮想4角形2200Aを縮小表示するのは次の理由による。
【0053】
すなわち、ビデオカメラ40でディスプレイ30を撮像する際に、その撮像方向がディスプレイ30の中心に対して上下または左右に幾分ずれていた場合に、そのずれ方向と反対側のディスプレイ領域がカメラ40の撮像エリアから外れてしまう場合がある。このような場合、表示エリアの隅に基準点マークを表示するとビデオカメラで撮像できない可能性がある。また、画面の中央の基準点P4にも、基準点マークM0を表示するのは、ビデオカメラ40の撮像エリアがディスプレイ30の中心に対して左右上下のいずれの方向にずれているかを、ビデオカメラ側で認識させ、カメラの方向を微調整するためである。
【0054】
ここにおいて、前記各基準点マークM0、M2、M4、M6、M8は全て同時に表示してもよいが、ここではビデオカメラ40側にどの基準点のマークかを簡単に認識させるために、まず中心の基準点マークM4を表示し、次に各コーナー部における基準点マークM0、M2、M6、M8を順次表示する。このような表示のための処理は、コントロール部200から処理部100に表示のための指令を出力し、この結果、画像生成部160がディスプレイ30上に前述した基準点マークM4、M0、M2、M6、M8を表示することにより行う。
【0055】
本実施の形態では、光線銃20から、常時、スポット光が投射されており、トリガ26を操作することによりシューティングのタイミングをコントロール部200に認識させる。このため、図13に示すステップS12において、オペレータは光線銃20をもって、ディスプレイ30上に順次表示される基準点マークMに照準を合わせ、これらをトリガー26を操作することにより順次シューティングする。これにより、M4、M0、M6、M2、M8の順に、各基準点マークに対応するスポット光が決定されることになる。
【0056】
ビデオカメラ40はこのようにしてディスプレイ30上に順次表示されるスポット光26を撮像する。このとき、各基準点マークM0、M1、M2、M6、M8に向けて発射された赤外線スポット光の、撮像エリア内での位置検出を、ビデオカメラ40の撮像信号に基づき行う。図4(B)には、このようにして検出された撮像エリア内における、各基準点マークの検出位置20−4(Q4)、20−0(Q0)、20−2(Q2)、20−6(Q6)、20−8(Q8)が示されている。同図に示すように、ビデオカメラ40で撮像された位置検出エリア2000Bは実際の領域に対して歪んで撮像されるため、同様の理由から撮像された各スポット光26−0、24−2、24−4、24−6、24−8の位置も歪んで表示されることになる。
【0057】
本実施の形態の特徴の1つは、このようにして撮像されたスポット光26の画像から、撮像エリアに含まれる位置検出エリア2100Bの領域を特定するとともに、ここの撮像エリア内で特定される位置検出エリア2100Bにおける座標位置と、ディスプレイ30上に実際に表示される位置検出エリア2100Aの座標位置との対応付けを行い、光線銃20から実際に位置検出エリア2100Aに向け発射された赤外線スポット光26の正確な着弾位置の検出のための処理を可能とすることにある。
【0058】
このため、図13におけるステップS14において、位置検出エリア2100Bを特定するための以下の処理を行う。
【0059】
まず、図4(B)に示すように撮像された各スポット光26−0、24−2、24−4、24−6、24−8の、撮像エリア内における位置を、図6に示すようにQ0、Q2、Q4、Q6、Q8とする。次にQ0、Q2、Q8、Q6を頂点とする4角形(ここでは台形)の各辺の中心位置をそれぞれQ1、Q5、Q7、Q3とする。
【0060】
ここで、図4に着目してみると、ビデオカメラ40で撮像される位置検出エリア(画像表示エリア)2100Bの画像は、上下左右に膨らんだ形をしている。このことは、ディスプレイ30上に、図5に示すように表示される仮想4角形22000Aも、ビデオカメラ40で撮像されると、位置検出エリア2100Bと同様に上下左右に膨らんだ形として撮像されることを意味する。この形状をシミュレートするために、本実施の形態では図6に示すように、前記各中点Q1、Q5、Q7、Q3に対して、所定のルールに従ったオフセット値を与え、各中点Q1、Q5、Q7、Q3を上下左右方向にQ1´、Q5´、Q7´、Q3´の位置まで移動する。
【0061】
そして、Q0、Q2間を、Q1´の点を通る二次曲線で結び、同様にQ2、Q8間をQ5´を通る二次曲線で結び、Q8、Q6間をQ7´を通る二次曲線で結び、Q6、Q0間をQ3´を通る二次曲線で結ぶ。これにより、ビデオカメラ40で撮像される実際の仮想4角形2200Aの、撮像エリア内における領域を忠実に特定することができる。
【0062】
このとき、前記各オフセット値は、ビデオカメラ40のディスプレイ30に対する設置角度が決まっていれば予め既知の値として求めておくことができる。本実施の形態ではシミュレータ10の設計段階において決定されるディスプレイ30とビデオカメラ40との相対的な位置関係に基づき、最適なオフセット値を予め求めておき、ゲーム機本体の所定の記憶エリアに書き込んでおけばよい。
【0063】
なお、図6に示すように、仮想4角形2200Bが台形形状に歪む場合には、相対向する台形の一対の斜辺の中心点Q3、Q5に対するオフセット値は、斜辺と直交する方向ではなく、斜めに交叉する方向に対して与えるように設定する。例えば、本実施の形態のように、ディスプレイ30の下方向から見られるように撮像する場合には、仮想4角形2200Bは下方向に開く台形形状として撮像されるため、この場合には斜辺に対して斜め下方向に交叉するように前記オフセット値を与える。また、例えばこれとは逆に、ディスプレイ領域を上方向から撮像する場合には、仮想4角形2200Bは逆方向に歪むため、前記Q3、Q5に対するオフセット値は、斜辺に対して斜め上に交叉する方向に与えることが好ましい。このようにすることにより、実際の仮想4角形2200Aの撮像エリアを、図6に示すように二次曲線で囲まれた領域として正確に特定することができる。
【0064】
なお、このようにディスプレイ30上に表示される仮想4角形2200Aを、ビデオカメラ40では歪んで撮像されることを見越し、ディスプレイ上に表示される仮想4角形2200Aの各辺の中点に、位置検出マークを表示し、これを狙って赤外線を投射し、その位置をカメラ40側に認識させるという手法も考えられる。このようにすると、ディスプレイ30上に合計9点のマークを表示しなければならず、しかもこれら全てを、正確にシューティングするという作業をオペレータに強いることになり、オペレータの負担が重くなる。特に、ゲームセンターのように、同じ機種が複数台設置されるような場合に、各ゲーム機毎にこのように負荷の大きい作業をオペレータに行わせることは、好ましくない。これに対し、本実施の形態では、その約半分である5つの基準点マークを表示しこれをシューティングさせる処理をオペレータに行わせるのみで、正確な位置検出が可能となるので、オペレータの負担を大幅に軽減することができる。
【0065】
図6(B)には、始点QS、QE間を結ぶ辺をその中間の点Qcを通る二次曲線により近似し幾何学的に求める場合の一例が示されている。本実施の形態では、図中縦方向に延びる辺を(1)式で近似し、図中横方向に伸びる辺を(2)式で近似する。
Q(t)={2(QE−QS)+4(QS−QC)}t2−{(QE−QS)+4(QS−QC)t+QS} …(1)
但し、 0.0≦t≦1.0
Q(u)={2(QE−QS)+4(QS−QC)}u2−{(QE−QS)+4(QS−QC)u+QS} …(2)
但し、 0.0≦u≦1.0
ところで、図6に示すように認識されたエリア2200Bは、ディスプレイ30上における仮想4角形2200Aの領域に対応するものである。この仮想4角形2200Aは、実際の位置検出エリア2100Aを所与の縮小倍率で縦方向、横方向に縮小したものである。このため、図6に示す認識エリア2200Bを縦方向、横方向に所与の倍率で拡大することで、位置検出エリア2100Aに対応した撮像エリア内における位置検出エリア2100Bを特定することが必要となる。
【0066】
図7、8にはこの一連の処理説明図が示されている。
【0067】
まず、図7に示すように、Q0、Q3´、Q6を結ぶ二次曲線、Q1´、Q4、Q7´を結ぶ二次曲線、Q2、Q5´、Q8を結ぶ二次曲線を縦方向に拡大する。この拡大は、前記(1)式の二次曲線のパラメータの範囲を0.0≦t<1.0から、−α≦t<1.0+α(α>0.0)に拡大することにより行う。
【0068】
このようにすると、Q0、Q1´、Q2、Q6、Q7´、Q8の各点は、それぞれP0´、P1、P2´、P6´、P7、P8´の位置まで二次曲線に沿って上下方向に移動する。このときαの値は、図5に示す仮想4角形2200Aと、位置検出エリア2100Aの位置検出エリア210Aに対する縦方向の比に合わせて設定される。
【0069】
次に、図8に示すように、P0´、P1、P2´を結ぶ二次曲線、Q3´、Q4、Q5´を結ぶを二次曲線、P6´、P7、P8´を結ぶ二次曲線に沿って、P0´、P2´、Q5´、P8´、P6´、Q3´を横方向に拡大する。この拡大は、前記(2)式の二次曲線のパラメータの範囲を0.≦u<1.0から、−β≦u<1.0+β(β>0.0)に拡大するすることにより行う。
【0070】
このとき拡大率を特定するためのβの値は、図5において仮想4角形2200Aに対する実際の位置検出エリア2100Aの横方向への倍率に基づいて設定される。このような拡大処理を行うことにより、図8に示すように、P0´、P2´、Q5´、P8´、P6´、Q3´は、それぞれP0、P2、P5、P8、P6、P3の位置まで移動する。
【0071】
このような拡大処理によって得られたP0、P1、P2、P5、P8、P7、P6、P3によって特定される撮像エリア内の領域2100Bは、ディスプレイ30上に表示される位置検出エリア2100A(本実施の形態では画像表示エリア2000Aと一致する)の撮像エリアと一致する。
【0072】
このようにして、テレビカメラ40の撮像エリアに含まれる位置検出エリア2100Bを特定することができる。
【0073】
(3)M×Nのマトリクス分割
次に、図13のステップS16において、撮像エリア内における特定された位置検出エリア2100Bと、図5に示す実際の位置検出エリア2100Aの間の座標の対応関係を求める処理を行う。本実施の形態では、図5に示す画面中央の基準点P4の位置データは、図8に示す特定された位置検出エリアの中心点Q4として与えられる。なお、便宜上、この撮像エリア内におけるQ4の位置も、P4と表示して以下の説明を行う。
【0074】
このP4の点における、位置検出エリア2100内の座標位置データは予め与えられていることは前述した。そして、図5に示す仮想4角形2200Aの四隅P0、P2、P8、P6の点の、位置検出エリア2100A内における位置データも与えられており、さらに前述した縦方向の倍率を特定するためのαと、横方向の倍率を特定するためのβの値も製品出荷時に予め与えられ、記憶手段に記憶されている。このため、図8に示すように、撮像エリア内において特定される位置検出エリア2100Bの各コーナー部P0、P2、P8、P6の、実際の表示画面上における座標位置も演算により求められる。このようにして、実際の位置検出エリア2100Aの座標と撮像エリア内において特定された位置検出エリア2100Bの座標との対応関係を求めることができる。
【0075】
以下にその具体的な処理を説明する。
【0076】
撮像エリア内において、図9(A)に示したように特定された位置検出エリア2100Bを、図9(B)に示すようにM×Nのマトリクスに分割する。
【0077】
まずP0、P1、P2を結ぶ二次曲線の辺、P3、P4、P5を結ぶ二次曲線、P6、P7、P8を結ぶ二次曲線の辺を、各中点P1、P4、P7が中央の分割点となるように(M−1)分割(但し、Mは偶数)する。そして、上下方向に相対向する辺の対向する分割点間を、中心のラインの対応する分割点を互いに交叉することなく通過するように前記(1)式で示す二次曲線Djで結ぶ(但し、j=0,1…M)。これにより、特定された位置検出エリア2100Bは横方向にM分割されることになる。
【0078】
さらに、図10(A)に示すように、P0、P3、P6を結ぶ二次曲線の辺、P2、P5、P8を結ぶ二次曲線の辺及び中点P1、P4、P7を結ぶ二次曲線の辺を、各辺の中央点P3、P5、P4が中央の分割点となるように(N−1)分割(但し、Nは偶数)する。そして横方向に相対向する辺の分割点間を、中央の線の対応する分割点を互いに交叉することなく通過するように、前記(2)式の二次曲線Ciで結ぶ(但し、i=0,1,…N)。これにより、図10(A)に示すように、位置検出エリア2100Bは縦方向にN分割される。
【0079】
このようにして、横方向にM分割、縦方向にN分割することにより、図10(B)に示すように、撮像エリア内の位置検出エリア2100BをM×N個のマトリクスに分割することができる。
【0080】
そして、前述したように位置検出エリア2100Bの中点P4の座標(実際の位置検出エリアに対応する座標)及びその四隅の頂点P0、P2、P8、P6の座標(実際の位置検出エリアの頂点座標)はすでに判明しているため、この位置検出エリアを前述したようにM×Nのマトリクスに分割したことにより得られる各分割エリアの頂点(図10において黒丸で示す位置)の座標(実際の位置検出エリアに対応した座標)も計算により求められる。
【0081】
このように、撮像エリア内において特定された位置検出エリア2100Bのデータ、及びこの位置検出エリア2100BをM×Nのマトリクスに分割したデータと、マトリクス各頂点の実際の位置検出エリア2100Aの座標に対応した座標位置データは、RAM140に書き込み記憶される。
【0082】
これにより、このシミュレータを用いて、プレーヤが光線銃20からディスプレイ30上に表示されるゲーム画面の標的に向けシューティングを行った場合に、ゲーム画面上における銃の着弾位置を表すスポット光の位置検出を、赤外線ビデオカメラ40の撮像信号に基づき正確に行い、命中判定を行うことが可能となる。
【0083】
(4)位置検出処理
図14には、位置検出部212が実行する特徴的な処理の例が示されている。
【0084】
まず、ゲームが開始されると、ディスプレイ30上には、ゲーム演算部110が演算し画像生成部160が生成したゲーム画面が表示される。このゲーム画面内には前述したように各種の標的が次々と表示される。本実施の形態では、位置検出エリア2100A全域がシューティングエリアとして設定され、この内部に適宜標的が表示され、プレーヤは光線銃20を用いて標的めがけて射的をすることになる。
【0085】
赤外線ビデオカメラ40は、ディスプレイ30上に表示される前記スポット光26のみをゲーム画面と分離して撮像する。
【0086】
そして、スポット光位置検出部212は、ステップS22〜S26の処理を行ない、位置検出エリア2100A内におけるスポット光26の着弾位置検出を行う。
【0087】
次に、この位置検出処理を詳細に説明する。
【0088】
ビデオカメラ40で撮像されたスポット光26の位置がは、図11(A)に示すように撮像エリアのV9の点である場合を想定する。
【0089】
(4−1)ブロックの特定
まず撮像エリア内のスポット光が、M×Nのブロックに分割された位置検出エリア2100Bのどのブロック内に存在するかを特定する処理を行う。
【0090】
具体的には、まず図12(A)に示すように、位置検出エリアを縦方向に分割するC0〜CMの二次曲線に対して、スポット光26がどの二次曲線Ciの間に挟まれているかを検出する。この検出処理は、スポット光26が、前記各二次曲線Ciの上側に存在するか下側に存在するかを準に調べていくという簡単な処理により実現できる。
【0091】
次に、スポット光26が、位置検出エリアを縦方向に分割するD0〜DNの複数本の二次曲線Djのどれに挟まれているかを検出する。この検出処理は、スポット光26が各二次曲線Djの右側に位置するか左側に位置するかを検出するという簡単な処理により実現できる。
【0092】
ところで、本実施の形態では、位置検出エリア2100Bは横方向にM個に分割され、縦方向にN個に分割されている。
【0093】
ディスプレイ30上に表示される実際の位置検出エリア2100Aの横方向のサイズをXSIZE、縦方向のサイズをYSIZEとし、かつこの実際の位置検出エリア2100AをM×Nマトリクスに等分割し、しかも位置検出エリア2100Aの左上の点をX=0、Y=0の座標原点として設定すると、横方向にj番目、縦方向にi番目に存在するマトリクス内のブロックの左上隅の座標は次式で表されることになる。
X=XSIZE・j/M
Y=YSIZE・i/N …(3)
但し、i=0、1、…N、j=0、1、…Mの値を取る。
このようにして、スポット光26が存在する位置検出エリア2100B内でのブロックが特定され、特定されたブロックの各頂点の座標を求めることができる。
【0094】
(4−2)ブロック内での位置
このようにして、スポット光26が存在するブロックが特定されると、次にステップS24において、当該ブロック内におけるスポット光の位置検出を行う。
【0095】
本実施の形態では、前記マトリクスの構成単位であるブロックは4点により囲まれており、しかも位置検出エリア2100Bを構成する各ブロックは、図12(B)に示すような四角形で近似することができる。ここでV1、V2、V3、V4は、当該ブロックを囲むマトリクスの頂点位置とすると、しかもこれら各頂点位置における座標は前記(3)式により求められる。
【0096】
このブロック内において、スポット光26の存在する位置V9は、当該ブロックを横方向にs:(1−s)に内分し、縦方向にq:(1−q)に内分するものとするとする(但し、0≦s≦1,0≦q≦1)。このとき、前記ブロック内におけるV9の位置と前記各頂点V1、V2、V3、V4の位置とから、前記内分点の比率を特定するためのs、qの値を演算により求めることができる。ここにおいて、このブロックの左上隅の点V1を基準とした、目標点V9の座標(ΔX,ΔY)は、各ブロックのX軸、縦方向の寸法が(XSIZE/M)、(YSIZE/N)となることから、次式で求めることができる。
ΔX=(XSIZE/M)・s
ΔY=(YSIZE/N)・q …(4)
このように、本実施の形態では、位置検出エリア2100BのM×Nのマトリクスを構成する各ブロックを四角形状に近似し、この四角形内の位置を求めることにより、ブロック内の位置検出を簡単に行うことができる。しかも、各ブロックは、その形状が多少歪んでいるといえども四角形状に極めて近い形をしているため、前記近似により発生する誤差は無視できる程度の値となる。
【0097】
(4−3)位置検出エリアないでの検出位置
次に、ステップS26において、ステップS24で求めたスポット光存在するブロックの左上コーナー部の座標データと、ステップS26で求めたブロック内におけるスポット光の位置ΔX、ΔYとに基づき、次式に基づき実際の位置検出エリア2100A内におけるスポット光26の着弾位置のXY座標を求めることができる。
X=XSIZE・(j+s)/M (0≦j<M, 0.0≦s<1.0…(5)
Y=YSIZE・(i+q)/N (0≦i<N, 0.0≦q<1.0…(6)
このように、本実施の形態によれば、ビデオカメラ40の撮像エリアに含まれる位置検出エリア2100Bのどの位置に、スポット光26が存在するかを直接検出するのではなく、予め撮像エリア内における位置検出エリア2100BをM×Nのマトリクスに粗分割しておき、どの分割エリアにスポット光が存在するかを判定した後、スポット光の存在するブロック内のどの位置にスポット光を配置するかを検出するという2段階の処理を行い、位置検出エリア2100B内におけるスポット光の位置検出を行っている。このようにすることにより、スポット光の位置検出を直接行う場合に比べ、CPUの演算処理の負担を大幅に軽減し、かつスポット光の位置検出を正確に行うことが可能となる。
【0098】
(5)他の実施の形態
なお、本実施の形態では、撮像エリア内におけるスポット光を、前述したように二次曲線を用いて複数のマトリクスに分割する場合を例にとり説明したが、位置検出エリアを複数のブロックに分割するための分割ラインは、このように二次曲線に限らず、必要に応じて三次以上の曲線を用いてもよく、また多少精度が低下しても構わないならば、直線を用いてもよい。
【0099】
また、前記実施の形態では、画像表示エリア2000Aと、位置検出エリア2000Aとが一致する場合を例にとり説明したが、画像表示エリア2000Aに比べ位置検出エリア2000Aが小さい場合に対しても本発明に適用することができる。
【0100】
また、前記実施の形態では、位置検出エリア2100Aに対して、仮想4角形2200Aを縮小して設定する場合を例にとり説明したが、位置検出エリア2100Aと仮想4角形2200Aを同一のエリアとして設定してもよい。またはこれとは逆に位置検出エリア2100Aが小さい場合には、これを拡大したもとして仮想4角形2200Aを設定してもよい。この場合には、上述した実施の形態とは逆に、仮想4角形2200Aに対応したエリアを撮像エリア内において特定した後、このエリアに対し、位置検出エリア2100Aに特定するために所定の縮小処理を行うことが必要となる。
【0101】
また、シューティングゲームにおいては、画像表示エリア2000内の比較的狭い範囲に、標的が表示されるシューティングエリアが設定される場合も多く、このような場合には、位置検出エリア2100Aをシューティングエリアと一致させるように形成すればよく、さらに好ましくはこのシューティングエリアと仮想4角形2200Aとを一致させるように設定すればよい。このようにすれば、撮像エリア内における仮想4角形2200Aの位置が特定されれば、これがそのままシューティングエリアを特定する領域となるため、前記拡大縮小等の処理を行う必要がない。
【0102】
また、前記実施の形態において、図1に示した構成に変えて図15に示すような構成を採用することも可能である。図15は、本発明に係るシミュレータの他の例を示す概略説明図である。なお、前記実施の形態と対応する部材には同一符号を付してその説明は省略する。
【0103】
ゲーム装置本体30は、筐体351と、この筐体における光線銃20側の面に設けられたディスプレイ316と、ディスプレイ316と対応する位置において筐体351の内部に形成されたスポット光形成エリア312と、このスポット光形成エリア312及びディスプレイ316の間に配置されたハーフミラー314と、このハーフミラー314の下方において表示画面を上方に向けて設置されたCRT32と、前記スポット光形成エリア312を撮像する赤外線ビデオカメラ40とを含む。また、ゲーム装置本体の内部には図示しない回路基板が組み込まれ、図2のブロック図に示された機能と同様な機能を実現するように構成されている。
【0104】
ディスプレイ316は、ガラス板やプラスチック板等の透明部材で形成されており、ハーフミラー314で映し出された画像を外部から見られるようになっている。
【0105】
ハーフミラー314が、入射される光の一部を透過し他を反射するものであり、分離手段に相当する。ハーフミラー314は、光線銃20の方向に対して所定角度、ここでは45度傾けて設置されている。スポット光形成エリア312は、光線銃20の方向から入射した光をハーフミラー314が透過する方向に形成され、CRT32は、光線銃20の方向から入射した光をハーフミラー314が反射する方向に設置される。これにより、下方に設置されたCRT32の画像をプレーヤの方向に反射表示して、光線銃20を手にしたプレーヤに画像を見せることが可能となる。また、光線銃20から発射された赤外線ビームはハーフミラー314を透過し、スポット光形成領域312にスポット光として形成されることになる。
【0106】
ビデオカメラ40は、前記実施の形態と同様の機能を有し、このビデオカメラ40で取り込まれた画像データに基づき、撮像領域に含まれる位置検出エリア2100Bが前記実施の形態と同様にして特定され、また前記実施の形態と同様にしてスポット光の着弾位置検出、命中判定が行われることになる。なお、ハーフミラー314に対するスポット光形成領域312とCRT32との位置関係は、図15に示す場合と逆にすることも可能となる。
【0107】
また、本発明は、単なるスポット光位置検出システムとしても形成することができる。本発明の装置は、例えばディスプレイ30上に表示される所定の画像に光を投射することで、例えばその画像を指し示す光ポインティングディバイス用の位置検出システムとしても使用することができる。
【0108】
また、本発明は前記実施例に限定されるものではなく、シューティングゲーム以外に、例えばシューティング用のシミュレータ、具体的には軍事訓練や武器等の着弾シミュレータ用の装置としても用いることができる。
【0109】
また、前記実施の形態では、ビデオカメラ40として、赤外線の波長領域の画像のみを撮像する赤外線撮像手段を用いた場合を例にとり説明したが、画像信号からスポット光が検出することができるれば、通常のビデオカメラを用いてもよい。例えばレーザビームの投射によるスポット光の位置検出を行う場合には、その光の輝度が極めて強いため、通常のビデオカメラを用いてもこのスポット光位置検出を、前記実施の形態と同様にして行うことができる。
【0110】
また、前記実施の形態では、赤外線スポット光を用いる場合を例にとり説明したが、これ以外に他の波長帯域、例えばプレーヤの目に見えない他の波長帯域の光線銃20のポインティングディバイスから発射しディスプレイ上に投射するようにしてもよい。この場合には、当該波長帯域の光のみを透過するフィルタを介して、ディスプレイ30またはスポット光形成エリアにおける画像を撮像するように形成すればよく、このようにしても前記実施の形態と同様な作用効果を奏することができる。
【図面の簡単な説明】
【図1】本発明を適用したシミュレータの第1の実施の形態の概略説明図である。
【図2】ゲーム装置本体の機能を実現するための概略構成を示すブロック図である。
【図3】本発明のシミュレータの概略斜視説明図である。
【図4】同図(A)は、赤外線ビデオカメラでの撮像画像の説明図であり、同図(B)は、この撮像画像に含まれる画像表示エリア、位置検出エリアの説明図である。
【図5】ディスプレイ上に表示される基準位置及び位置検出用マークの説明図である。
【図6】同図(A)は、撮像信号から位置検出マークの表示位置を特定するとともに、位置検出マークで特定される仮想4角形の領域を特定するための処理の説明図であり、同図(B)は、仮想4角形の各辺を近似するための二次曲線の概略説明図である。
【図7】仮想4角形を縦方向に拡大する処理の説明図である。
【図8】仮想4角形を横方向に拡大する処理の説明図である。
【図9】同図(A)は、撮像エリアにおいて特定された位置検出エリアを横方向にM分割する処理の説明図であり、同図(B)は、M×Nのマトリクスに分割された位置検出エリアの説明図である。
【図10】同図(A)は、位置検出エリアを縦方向にN分割する処理の説明図であり、同図(B)は、M×Nのマトリクスに分割された位置検出エリアの各分割ブロックの頂点位置の説明図である。
【図11】同図(A)は、位置検出エリアの分割マトリクスの概略説明図であり、同図(B)は、マトリクスの各ブロックを矩形形状に近似した位置検出エリアの概略説明図である。
【図12】同図(A)は、ビデオカメラで撮像されたスポット光が位置検出エリアのどの分割エリアに属するかを判定する処理の説明図であり、同図(B)は、ブロックが特定された際に、そのブロック内のどの位置にスポット光が存在するかを特定する処理の説明図である。
【図13】ゲーム開始前に、撮像エリアに含まれる位置検出エリアを特定する処理のフローチャート図である。
【図14】ゲーム中において、スポット光の着弾位置をカメラの撮像信号から検出するための処理のフローチャート図である。
【図15】本実施の形態の他の一例を示す説明図である。
【符号の説明】
10 シミュレータ
20 光線銃
22 赤外線発光部
26 スポット光
30 ディスプレイ
40 ビデオカメラ
50 ゲーム装置本体
100 処理部
110 ゲーム演算部
116 命令判定部
150 ROM
160 画像生成部
200 コントロール部
210 スポット光位置検出部
212 位置検出エリア特定部
Claims (13)
- 画像表示エリアにシューティングディバイスから投射されるスポット光の着弾位置検出を、画像表示エリアの位置検出エリアを撮像する撮像手段の撮像信号に基づき行なうシューティングゲーム用の装置であって、
前記撮像手段に撮像された位置検出エリアをM×Nブロックのマトリクスに分割するための分割情報と、前記マトリクスを構成するM×Nの各ブロックに対し与えられる前記画像表示エリアの位置検出エリアに対応した座標情報とが記憶された記憶手段と、
前記撮像信号と前記分割情報に基づき、スポット光が存在する前記分割マトリクスのブロックを特定するとともに、特定されたブロック内における前記スポット光の位置検出を行い、前記特定されたブロックの座標情報と、前記特定ブロック内における前記スポット光の位置検出情報とに基づき、前記位置検出エリアにおけるスポット光の着弾位置検出を行う位置検出手段と、
を含むことを特徴とするシューティングゲーム用の装置。 - 請求項1において、
前記記憶手段には、
前記位置検出エリアの相対向する1組の辺に設定された(M−1)個の内分点を互いに交叉しないように結ぶ第1の分割線群と、他の1組の辺に設定された(N−1)個の内分点を互いに交叉しないように結ぶ第2の分割線群とにより、前記位置検出エリアをM×Nブロックのマトリクスに分割するための分割情報が記憶されたことを特徴とするシューティングゲーム用の装置。 - 請求項1において、
前記記憶手段には、
画像表示エリアに含まれる位置検出エリアの中心位置に対応した撮像エリア内の位置を中点位置として特定するための情報が記憶されるとともに、
前記検出された位置検出エリアの相対向する1組の辺に(M−1)個(Mは偶数)の内分点を設定し、他の1組の辺に(N−1)個(Nは偶数)の内分点を設定し、
前記1組の辺の中央の内分点間を前記中点位置を介して結ぶ第1の中心多次曲線に(N−1)個の内分点を設定するとともに、前記他の1組の辺の中央の内分点間を前記中点位置を介して結ぶ第2の中心多次曲線に(M−1)個の内分点を設定し、
前記1組の辺の内分点間を、前記第2の中心多次曲線の対応する内分点を介して互いに交叉しないように多次の曲線で結ぶ第1の分割線群と、前記他の1組の辺の内分点間を、前記第1の中心多次曲線の対応する内分点を介して多次の曲線で互いに交叉しないように結ぶ第2の分割線群と、により、前記位置検出エリアをM×Nブロックのマトリクスに分割するための分割情報が記憶されたことを特徴とするシューティングゲーム用の装置。 - 請求項1〜3のいずれかにおいて、 前記シューティングゲームに代え、シューティング用のシミュレーションを行うことを特徴とする装置。
- 画像表示エリアに投射されるスポット光の位置検出を、画像表示エリアの位置検出エリアを撮像する撮像手段の撮像信号に基づき行なう位置検出用の装置であって、
前記撮像手段に撮像された位置検出エリアをM×Nブロックのマトリクスに分割するための分割情報と、前記マトリクスを構成するM×Nの各ブロックに対し与えられる画像表示エリアの位置検出エリアに対応した座標情報とが記憶された記憶手段と、
前記撮像信号と前記分割情報に基づき、スポット光が存在する前記分割マトリクスのブロックを特定するとともに、特定されたブロック内における前記スポット光の位置検出を行い、前記特定されたブロックの座標情報と、前記特定ブロック内における前記スポット光の位置検出情報とに基づき、前記位置検出エリアにおけるスポット光の着弾位置検出を行う位置検出手段と、
を含むことを特徴とする位置検出用の装置。 - 画像表示エリアにシューティングディバイスから投射されるスポット光の着弾位置検出を、画像表示エリアの位置検出エリアを撮像する撮像手段の撮像信号に基づき行ない、シューティングゲームを行うための処理をコンピュータに実行させるためのプログラムが記憶された情報記憶媒体であって、
記憶手段に記憶された所与の分割情報に基づき、前記撮像手段に撮像された位置検出エリアを、前記画像表示エリアの位置検出エリアに対応した座標情報が与えられたM×Nブロックのマトリクスに分割するための手段と、
前記撮像信号と前記分割情報に基づき、スポット光が存在する前記分割マトリクスのブロックを特定するとともに、特定されたブロック内における前記スポット光の位置検出を行い、前記特定されたブロックの座標情報と、前記特定ブロック内における前記スポット光の位置検出情報とに基づき、前記位置検出エリアにおけるスポット光の着弾位置検出を行う位置検出手段と、
としてコンピュータを機能させるプログラムが記憶されたことを特徴とするコンピュータ読み取り可能な情報記憶媒体。 - 請求項6において、
前記マトリクスに分割するための手段は、
前記位置検出エリアの相対向する1組の辺に設定された(M−1)個の内分点を互いに交叉しないように結ぶ第1の分割線群と、他の1組の辺に設定された(N−1)個の内分点を互いに交叉しないように結ぶ第2の分割線群とにより、前記位置検出エリアをM×Nブロックのマトリクスに分割することを特徴とする情報記憶媒体。 - 請求項6において、
前記マトリクスに分割するための手段は、
画像表示エリアに含まれる位置検出エリアの中心位置に対応した撮像エリア内の位置を中点位置として特定するとともに、
前記検出された位置検出エリアの相対向する1組の辺に(M−1)個(Mは偶数)の内分点を設定し、他の1組の辺に(N−1)個(Nは偶数)の内分点を設定し、
前記1組の辺の中央の内分点間を前記中点位置を介して結ぶ第1の中心多次曲線に(N−1)個の内分点を設定するとともに、前記他の1組の辺の中央の内分点間を前記中点位置を介して結ぶ第2の中心多次曲線に(M−1)個の内分点を設定し、
前記1組の辺の内分点間を、前記第2の中心多次曲線の対応する内分点を介して互いに交叉しないように多次の曲線で結ぶ第1の分割線群と、前記他の1組の辺の内分点間を、前記第1の中心多次曲線の対応する内分点を介して互いに交叉しないように多次の曲線で結ぶ第2の分割線群と、により、前記位置検出エリアをM×Nブロックのマトリクスに分割することを特徴とする情報記憶媒体。 - 請求項6〜8のいずれかにおいて、
前記位置検出エリアは、
実際の表示画像エリアに含まれるシューティングエリアとして与えられることを特徴とする情報記憶媒体。 - 請求項6〜9のいずれかにおいて、
前記シューティングゲームを行うためのプログラムに代え、シューティング用のシミュレーションを行うためのプログラムを記憶することを特徴とする情報記憶媒体。 - 画像表示エリアに投射されるスポット光の位置検出を、画像表示エリアの位置検出エリアを撮像する撮像手段の撮像信号に基づき行なうための処理をコンピュータに実行させるためのプログラムが記憶された情報記憶媒体であって、
記憶手段に記憶された所与の分割情報に基づき、前記撮像手段に撮像された位置検出示エリアを、前記画像表示エリアの位置検出エリアに対応した座標情報が与えられたM×Nブロックのマトリクスに分割するための手段と、
前記撮像信号と前記分割情報に基づき、スポット光が存在する前記分割マトリクスのブロックを特定するとともに、特定されたブロック内における前記スポット光の位置検出を行い、前記特定されたブロックの座標情報と、前記特定ブロック内における前記スポット光の位置検出情報とに基づき、前記位置検出エリアにおけるスポット光の着弾位置検出を行う位置検出手段と、
としてコンピュータを機能させるプログラムを記憶することを特徴とするコンピュータ読み取り可能な情報記憶媒体。 - 請求項1〜5のいずれかにおいて、
前記撮像手段は、実際の表示画像エリアに含まれる位置検出エリアを通過又は反射したスポット光が形成されるスポット光形成エリアを、前記位置検出エリアに替えて撮像することを特徴とする装置。 - 請求項6〜11のいずれかにおいて、
前記撮像手段は、実際の表示画像エリアに含まれる位置検出エリアを通過又は反射したスポット光が形成されるスポット光形成エリアを、前記位置検出エリアに替えて撮像することを特徴とする情報記憶媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000011970A JP3554516B2 (ja) | 1999-12-06 | 2000-01-20 | シューティングゲーム用の装置、位置検出用の装置及び情報記憶媒体 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP34680499 | 1999-12-06 | ||
| JP11-346804 | 1999-12-06 | ||
| JP2000011970A JP3554516B2 (ja) | 1999-12-06 | 2000-01-20 | シューティングゲーム用の装置、位置検出用の装置及び情報記憶媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001224855A JP2001224855A (ja) | 2001-08-21 |
| JP3554516B2 true JP3554516B2 (ja) | 2004-08-18 |
Family
ID=26578361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000011970A Expired - Fee Related JP3554516B2 (ja) | 1999-12-06 | 2000-01-20 | シューティングゲーム用の装置、位置検出用の装置及び情報記憶媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3554516B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3443416B2 (ja) | 2001-08-01 | 2003-09-02 | コナミ株式会社 | 射的ゲーム装置および射的ゲーム制御方法 |
-
2000
- 2000-01-20 JP JP2000011970A patent/JP3554516B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001224855A (ja) | 2001-08-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3554517B2 (ja) | ゲーム用の装置、位置検出用の装置及び情報記憶媒体 | |
| US12114107B2 (en) | Projector keystone correction method, apparatus and system, and readable storage medium | |
| US20080165342A1 (en) | Position Detection System | |
| KR101187500B1 (ko) | 광 투영 장치, 조명 장치 | |
| US7901093B2 (en) | Modeling light transport in complex display systems | |
| JP3422383B2 (ja) | 射撃ゲーム装置におけるビデオ画面とガンの相対位置を検出する方法及び装置 | |
| JP2002233665A5 (ja) | ||
| CN104660946B (zh) | 投影机及其控制方法 | |
| JP2001325069A (ja) | 位置検出装置およびその方法 | |
| JP2005124133A (ja) | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 | |
| JP2005353071A (ja) | アレーセンサーポインティング入力システム及びその方法(pointinginputsystemandmethodusingarraysensors) | |
| JP3960092B2 (ja) | 車両用画像処理装置 | |
| JP3554516B2 (ja) | シューティングゲーム用の装置、位置検出用の装置及び情報記憶媒体 | |
| JP2007071403A (ja) | 射撃模擬装置 | |
| JP3413129B2 (ja) | 画像処理方法及び画像処理装置 | |
| JPH0382493A (ja) | ビデオゲーム機 | |
| JP4024124B2 (ja) | 位置特定装置、その方法およびそのプログラム | |
| JP3198783B2 (ja) | 情報表示装置 | |
| CN2623298Y (zh) | 基于位置传感器的模拟激光射击系统 | |
| CN100450569C (zh) | 指向装置的指向点定位方法及其装置 | |
| JP2000189671A (ja) | 射撃ゲ―ム装置 | |
| JPS6232987A (ja) | レ−ザガンゲ−ム装置及びレ−ザガンゲ−ム装置に於ける命中検知方法 | |
| CN1348829A (zh) | 一种多目标多射手模拟激光射击系统 | |
| KR102467381B1 (ko) | 깊이 카메라를 이용한 평면 터치 인식 방법 및 이를 실행하는 장치 | |
| RU2804155C1 (ru) | Способ определения попадания в цель (варианты) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040329 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040427 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040507 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080514 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080514 Year of fee payment: 4 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080514 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090514 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100514 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100514 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100514 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110514 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120514 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120514 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130514 Year of fee payment: 9 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130514 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |