JP3172334U - 簡易化並列式独立制御できる伝動機構 - Google Patents
簡易化並列式独立制御できる伝動機構 Download PDFInfo
- Publication number
- JP3172334U JP3172334U JP2011005739U JP2011005739U JP3172334U JP 3172334 U JP3172334 U JP 3172334U JP 2011005739 U JP2011005739 U JP 2011005739U JP 2011005739 U JP2011005739 U JP 2011005739U JP 3172334 U JP3172334 U JP 3172334U
- Authority
- JP
- Japan
- Prior art keywords
- planetary gear
- gear set
- rotation axis
- transmission mechanism
- speed ratio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images



















Abstract
【課題】並列に接続している二つの遊星歯車セットを利用してエネルギー入力及びエネルギー出力を可変的に制御する簡易化並列式独立制御できるで伝動機構を提供する。
【解決手段】第一の遊星歯車セットは、第二の遊星歯車セットと機械的にかつ並列に接続している。簡易化並列式独立制御できる伝動機構は、エネルギー出力端、制御端、エネルギー入力端及び自由伝送端を備える。前記エネルギー出力端が前記第一の遊星歯車セットに設置され、前記制御端が前記第二の遊星歯車セットに設置されている。前記エネルギー入力端が前記第一の遊星歯車セット或いは前記第二の遊星歯車セットに設置された場合、前記自由伝送端は、相対的に前記第二の遊星歯車セット或いは前記第一の遊星歯車セットに設置される。前記制御端は、前記自由伝送端を前記エネルギー入力端かまたは前記エネルギー出力端に自在に切り替えるように制御する。
【選択図】図1
【解決手段】第一の遊星歯車セットは、第二の遊星歯車セットと機械的にかつ並列に接続している。簡易化並列式独立制御できる伝動機構は、エネルギー出力端、制御端、エネルギー入力端及び自由伝送端を備える。前記エネルギー出力端が前記第一の遊星歯車セットに設置され、前記制御端が前記第二の遊星歯車セットに設置されている。前記エネルギー入力端が前記第一の遊星歯車セット或いは前記第二の遊星歯車セットに設置された場合、前記自由伝送端は、相対的に前記第二の遊星歯車セット或いは前記第一の遊星歯車セットに設置される。前記制御端は、前記自由伝送端を前記エネルギー入力端かまたは前記エネルギー出力端に自在に切り替えるように制御する。
【選択図】図1
Description
本考案は、概ね、簡易化並列式独立制御できる伝動機構に関し、より詳細には、並列に接続した二つの遊星歯車セットを利用してエネルギー入力及びエネルギー出力を可変的に制御する独立制御できる伝動機構に関する。
従来の伝動機構として、例えば特許文献1には主軸にスライドが設置された車用変速機構造について提案されている。前記スライドの両側に前進歯車及び駆動歯車が設置されており、連動軸に後退スライドが設置されている。前記後退スライド側に位置した前記連動軸に後退かさ歯車及び前進かさ歯車が設置されており、かつ前記後退かさ歯車と前記前進かさ歯車との間に軸によって伝動される最終軸が設置されている。前記最終軸を前記後退かさ歯車と前記前進かさ歯車との間に位置させ、かつ前記駆動歯車及び前記前進歯車を前記後退かさ歯車と前記前進かさ歯車との間に位置させることにより、前記変速機の幅を小さくする。それとともに、前記連動軸の後退かさ歯車及び前進かさ歯車を前記最終軸の伝動かさ歯車に係合させることにより、前記変速機を小型化する。しかし、前記変速機に、摩擦で滑る前記スライドが設置されているため、伝動効率が低くなる。
他の伝動機構として、例えば特許文献2には連続可変伝動セットについて提案されている。前記連続可変伝動セットは、第一モーター及び第二モーターの動力を伝動軸に転送させるために使用される第一の遊星歯車セット及び第二の遊星歯車セットを備える。しかし、前記連続可変伝動セットは、前記第一モーター及び前記第二モーターの動力を固定的に前記第一の遊星歯車セット及び前記第二の遊星歯車セットを介して前記伝動軸に転送する。言い換えれば、前記連続可変伝動セットは、前記第一モーター及び前記第二モーターを二つの動力入力端に固定的に設定し、かつ前記伝動軸を単独の動力出力端に固定的に設定する。簡単に言えば、動力伝動において、エネルギー入力及びエネルギー出力を可変的に制御できる伝動機構をさらに提供する必要があり、異なる動力伝動の要求を満たす。
従って、本考案は、前記欠点を改善し、または前記要求を満たすため、簡易化並列式独立制御できる伝動機構を提供する。前記伝動機構は、二つの遊星歯車セットを利用してエネルギー入力及びエネルギー出力を可変的に制御する。前記伝動機構は、エネルギー出力端、制御端、エネルギー入力端及び自由伝送端を備える。前記制御端は、前記自由伝送端をエネルギー入力端かまたはエネルギー出力端に自在に切り替えるように制御し、伝動を独立制御する及び伝動効率を高める目的を達成する。なお、前記伝動機構は、他の摩擦摺動部材を使用せず、伝動効率を高める目的を達成できる。
台湾特許第I242521号明細書
米国特許第6387004号明細書
本考案の目的は、並列に接続している二つの遊星歯車セットを利用してエネルギー入力及びエネルギー出力を可変的に制御する簡易化並列式独立制御できる伝動機構を提供することにある。
本考案の他の目的は、並列に接続している二つの遊星歯車セットを利用してエネルギー入力及びエネルギー出力を可変的に制御する簡易化並列式独立制御できる伝動機構を提供することにある。前記伝動機構は、他の摩擦摺動部材を使用せず、エネルギー伝送効率を向上させる目的を達成できる。
上記目的を達成するために、本考案の簡易化並列式独立制御できる伝動機構は、第一の遊星歯車セット及び第二の遊星歯車セットを備える。前記第一の遊星歯車セットは、前記第二の遊星歯車セットに機械的にかつ並列に接続している。前記簡易化並列式独立制御できる伝動機構は、エネルギー出力端、制御端、エネルギー入力端及び自由伝送端を備える。前記エネルギー出力端が前記第一の遊星歯車セットに設置され、前記制御端が前記第二の遊星歯車セットに設置される。前記エネルギー入力端が前記第一の遊星歯車セットまたは前記第二の遊星歯車セットに設置された場合、前記自由伝送端は、相対的に前記第二の遊星歯車セットまたは前記第一の遊星歯車セットに設置される。前記制御端は、前記自由伝送端を前記エネルギー入力端かまたは前記エネルギー出力端に自在に切り替えるように制御する。
本考案の実施形態によって、前記第一の遊星歯車セットが、第一の回転軸、第二の回転軸及び第三の回転軸を備える。
本考案の実施形態によって、前記第一の遊星歯車セットの第一の回転軸が、前記簡易化並列式独立制御できる伝動機構のエネルギー出力端である。
本考案の実施形態によって、前記第一の遊星歯車セットの第二の回転軸が、前記簡易化並列式独立制御できる伝動機構の自由伝送端またはエネルギー入力端である。
本考案の実施形態によって、前記第一の遊星歯車セットの第三の回転軸が、前記第二の遊星歯車セットに接続される。
本考案の実施形態によって、前記第一の遊星歯車セットが、正速度比を有する。
本考案の実施形態によって、前記第二の遊星歯車セットが、第一の回転軸、第二の回転軸及び第三の回転軸を備える。
本考案の実施形態によって、前記第二の遊星歯車セットの第一の回転軸が、前記簡易化並列式独立制御できる伝動機構の制御端である。
本考案の実施形態によって、前記第二の遊星歯車セットの第二の回転軸が、前記簡易化並列式独立制御できる伝動機構のエネルギー入力端または自由伝送端である。
本考案の実施形態によって、前記第二の遊星歯車セットの第三の回転軸が、前記第一の遊星歯車セットに接続される。
本考案の実施形態によって、前記第二の遊星歯車セットが、負速度比を有する。
前記伝動機構は、制御端を利用して自由伝送端をエネルギー入力端かまたはエネルギー出力端に自在に切り替えるように制御し、伝動を独立制御する及びエネルギー伝送効率を向上させる効果がある。
本考案は、添付図面に関連して行われる以下の好ましい実施形態の詳細な説明から一層明らかとなろう。
本考案の実施形態による簡易化並列式独立制御できる伝動機構は、例えば水力発電機、風力発電機或いはハイブリッド車の伝動変速機等さまざまな変速伝動装置に適用できるが、本考案の簡易化並列式独立制御できる伝動機構の適用範囲をこれらに限定するものではない。
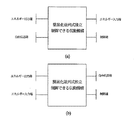
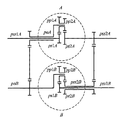
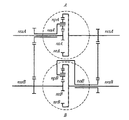
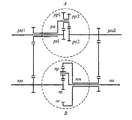
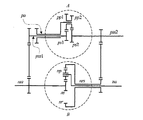
図1a及び1bは、本考案の第一及び第二の実施形態による簡易化並列式独立制御できる伝動機構の概略図であり、図2a及び2bは、本考案の第一及び第二の実施形態による簡易化並列式独立制御できる伝動機構の内部図である。図1a、1b、2a及び2bを参照して、本考案の第一及び第二の実施形態による簡易化並列式独立制御できる伝動機構は、主に第一の遊星歯車セット1及び第二の遊星歯車セット2を備え、かつ前記第一の遊星歯車セット1が前記第二の遊星歯車セット2に機械的にかつ並列に接続している。
図1a、1b、2a及び2bを参照して、本考案の第一及び第二の実施形態による簡易化並列式独立制御できる伝動機構は、エネルギー出力端、制御端、エネルギー入力端及び自由伝送端を備える。
図1a及び2aを参照して、本考案の第一の実施形態による簡易化並列式独立制御できる伝動機構の前記エネルギー出力端及び前記エネルギー入力端は、前記第一の遊星歯車セット1に関連し、前記制御端及び前記自由伝送端は、前記第二の遊星歯車セット2に関連する。本考案の第一の実施形態による簡易化並列式独立制御できる伝動機構において、前記エネルギー出力端と前記エネルギー入力端との組み合わせ及び前記制御端及び前記自由伝送端との組み合わせに対し、前記第一の遊星歯車セット1と前記第二の遊星歯車セット2とは機械的にかつ並列に接続されている。
図1b及び2bを参照して、本考案の第二の実施形態による簡易化並列式独立制御できる伝動機構の前記エネルギー出力端及び前記自由伝送端は、前記第一の遊星歯車セット1に関連し、前記制御端及び前記エネルギー入力端は、前記第二の遊星歯車セット2に関連する。同じように、本考案の第二の実施形態による簡易化並列式独立制御できる伝動機構において、前記エネルギー出力端と前記自由伝送端との組み合わせ及び前記制御端及び前記エネルギー入力端との組み合わせに対し、前記第一の遊星歯車セット1と前記第二の遊星歯車セット2とは機械的にかつ並列に接続されている。
図2aを参照して、前記第一の遊星歯車セット1は、第一の回転軸OP、第二の回転軸AD及び第三の回転軸AEを備える。前記第一の遊星歯車セット1の前記第一の回転軸OPが前記簡易化並列式独立制御できる伝動機構のエネルギー出力端であり、前記第一の遊星歯車セット1の前記第二の回転軸ADが前記簡易化並列式独立制御できる伝動機構のエネルギー入力端であり、前記第一の遊星歯車セット1の前記第三の回転軸AEが前記第二の遊星歯車セット2に接続されている。一方、前記第二の遊星歯車セット2は、第一の回転軸CR、第二の回転軸BD及び第三の回転軸BEを備える。前記第二の遊星歯車セット2の前記第一の回転軸CRが前記簡易化並列式独立制御できる伝動機構の制御端であり、前記第二の遊星歯車セット2の前記第二の回転軸BDが前記独立制御できる伝動機構の自由伝送端であり、前記第二の遊星歯車セット2の前記第三の回転軸BEが前記第一の遊星歯車セット1に接続されている。
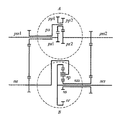
図2bを参照して、前記第一の遊星歯車セット1は、第一の回転軸OP、第二の回転軸AD及び第三の回転軸AEを備える。前記第一の遊星歯車セット1の前記第一の回転軸OPが前記簡易化並列式独立制御できる伝動機構のエネルギー出力端であり、前記第一の遊星歯車セット1の前記第二の回転軸ADが前記簡易化並列式独立制御できる伝動機構の自由伝送端であり、前記第一の遊星歯車セット1の前記第三の回転軸AEが前記第二の遊星歯車セット2に接続されている。一方、前記第二の遊星歯車セット2は、第一の回転軸CR、第二の回転軸BD及び第三の回転軸BEを備える。前記第二の遊星歯車セット2の前記第一の回転軸CRが前記簡易化並列式独立制御できる伝動機構の制御端であり、前記第二の遊星歯車セット2の前記第二の回転軸BDが前記独立制御できる伝動機構のエネルギー入力端であり、前記第二の遊星歯車セット2の前記第三の回転軸BEが前記第一の遊星歯車セット1に接続されている。
図1a及び2aを参照して、本考案の第一の実施形態による簡易化並列式独立制御できる伝動機構は、前記第二の遊星歯車セット2の制御端(第一の回転軸CR)を利用し、前記第二の遊星歯車セット2の自由伝送端(第二の回転軸BD)をエネルギー入力端かまたはエネルギー出力端に自在に切り替えるように制御する。前記第二の遊星歯車セット2の自由伝送端BDがエネルギー入力端に切り替えた場合、前記第二の遊星歯車セット2の自由伝送端BD及び前記第一の遊星歯車セット1のエネルギー入力端(第二の回転軸AD)は共にエネルギーを入力する。また、前記第二の遊星歯車セット2の自由伝送端BDがエネルギー出力端に切り替えた場合、前記第二の遊星歯車セット2の自由伝送端BD及び前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)は共にエネルギーを出力する。
図1b及び2bを参照して、本考案の第二の実施形態による簡易化並列式独立制御できる伝動機構は、前記第二の遊星歯車セット2の制御端(第一の回転軸CR)を利用し、前記第一の遊星歯車セット1の自由伝送端(第二の回転軸AD)をエネルギー入力端かまたはエネルギー出力端に自在に切り替えるように制御する。前記第一の遊星歯車セット1の自由伝送端ADがエネルギー入力端に切り替えた場合、前記第一の遊星歯車セット1の自由伝送端AD及び前記第二の遊星歯車セット2のエネルギー入力端(第二の回転軸BD)は共にエネルギーを入力する。また、前記第一の遊星歯車セット1の自由伝送端ADがエネルギー出力端に切り替えた場合、前記第一の遊星歯車セット1の自由伝送端AD及び前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)は共にエネルギーを出力する。
図3a及び3bは、本考案の実施形態による簡易化並列式独立制御できる伝動機構に使用される遊星歯車セットの内部図である。その内部図には、二種類の遊星歯車セットの内部構造を含むが、本考案をそれらに制限するものではない。
図3aを参照して、前記遊星歯車セットは、太陽歯車ps1、太陽歯車の回転軸pss1、中央歯車ps2、中央歯車の回転軸pss2、遊星キャリアの回転軸pa及び少なくとも一つの複合遊星歯車を備え、前記複合遊星歯車は、第一の遊星歯車pp1及び第二の遊星歯車pp2を備える。前記第一の遊星歯車pp1及び前記第二の遊星歯車pp2は、前記太陽歯車ps1及び中央歯車ps2に係合している。前記遊星キャリアの回転軸paが固定された場合、前記太陽歯車の回転軸pss1及び中央歯車の回転軸pss2の回転方向は同方向であり、かつ正回転速度比を有している。すなわち、前記遊星歯車セットは、正速度比を有している。
図2a、2b及び3aを参照して、前記太陽歯車の回転軸pss1、中央歯車の回転軸pss2及び遊星キャリアの回転軸paは、自在に前記第一の遊星歯車セット1の第一の回転軸OP、第二の回転軸AD及び第三の回転軸AEとすることができる。また、前記太陽歯車の回転軸pss1、中央歯車の回転軸pss2及び遊星キャリアの回転軸paは、自在に前記第二の遊星歯車セット2の第一の回転軸CR、第二の回転軸BD及び第三の回転軸BEとすることができる。
図3bを参照して、前記遊星歯車セットは、太陽歯車ns、太陽歯車の回転軸nss、リングギアnr、リングギアの回転軸nrs、遊星キャリアの回転軸na及び少なくとも一つの遊星歯車npを備える。前記遊星歯車npは前記太陽歯車ns及びリングギアnrに係合している。前記遊星キャリアの回転軸naが固定された場合、前記太陽歯車の回転軸nss及びリングギアの回転軸nrsの回転方向は逆方向であり、かつ負回転速度比を有している。すなわち、前記遊星歯車セットは、負速度比を有している。
図2a、2b及び3bを参照して、前記太陽歯車の回転軸nss、リングギアの回転軸nrs及び遊星キャリアの回転軸naは、自在に前記第一の遊星歯車セット1の第一の回転軸OP、第二の回転軸AD及び第三の回転軸AEとすることができる。また、前記太陽歯車の回転軸nss、リングギアの回転軸nrs及び遊星キャリアの回転軸naは、自在に前記第二の遊星歯車セット2の第一の回転軸CR、第二の回転軸BD及び第三の回転軸BEとすることができる。
図2aを参照して、本考案の簡易化並列式独立制御できる伝動機構は、前記第一の遊星歯車セット1の第二の回転軸ADの回転速度と前記第二の遊星歯車セット2の第三の回転軸BEの回転速度との回転速度比を
[数1]nBE=αnAD
に設定する。また、前記第一の遊星歯車セット1の第三の回転軸AEの回転速度と前記第二の遊星歯車セット2の第二の回転軸BDの回転速度との回転速度比を
[数2]nAE=nBD
に設定する。ここで、nAD及びnBEは、それぞれ前記第一の遊星歯車セット1の第二の回転軸ADの回転速度及び前記第二の遊星歯車セット2の第三の回転軸BEの回転速度であり、nAE及びnBDは、それぞれ前記第一の遊星歯車セット1の第三の回転軸AEの回転速度及び前記第二の遊星歯車セット2の第二の回転軸BDの回転速度であり、αは第一のパラメーターである。
[数1]nBE=αnAD
に設定する。また、前記第一の遊星歯車セット1の第三の回転軸AEの回転速度と前記第二の遊星歯車セット2の第二の回転軸BDの回転速度との回転速度比を
[数2]nAE=nBD
に設定する。ここで、nAD及びnBEは、それぞれ前記第一の遊星歯車セット1の第二の回転軸ADの回転速度及び前記第二の遊星歯車セット2の第三の回転軸BEの回転速度であり、nAE及びnBDは、それぞれ前記第一の遊星歯車セット1の第三の回転軸AEの回転速度及び前記第二の遊星歯車セット2の第二の回転軸BDの回転速度であり、αは第一のパラメーターである。
一方、図2bを参照して、本考案の簡易化並列式独立制御できる伝動機構は、前記第二の遊星歯車セット2の第二の回転軸BDの回転速度と前記第一の遊星歯車セット1の第三の回転軸AEの回転速度との回転速度比を
[数3]nBD=αnAE
に設定する。また、前記第一の遊星歯車セット1の第二の回転軸ADの回転速度と前記第二の遊星歯車セット2の第三の回転軸BEの回転速度との回転速度比を
[数4]nAD=nBE
に設定する。
[数3]nBD=αnAE
に設定する。また、前記第一の遊星歯車セット1の第二の回転軸ADの回転速度と前記第二の遊星歯車セット2の第三の回転軸BEの回転速度との回転速度比を
[数4]nAD=nBE
に設定する。
一方、図2a及び2bを参照して、本考案の簡易化並列式独立制御できる伝動機構は、前記第一の遊星歯車セット1の第一の回転軸OP(エネルギー出力端)の回転速度と前記第二の遊星歯車セット2の第一の回転軸CR(制御端)の回転速度との回転速度比を
[数5]nCR=βnOP
に設定し、nOP及びnCRは、それぞれ前記第一の遊星歯車セット1の第一の回転軸OPの回転速度及び前記第二の遊星歯車セット2の第一の回転軸CRの回転速度であり、βは第二のパラメーターである。
[数5]nCR=βnOP
に設定し、nOP及びnCRは、それぞれ前記第一の遊星歯車セット1の第一の回転軸OPの回転速度及び前記第二の遊星歯車セット2の第一の回転軸CRの回転速度であり、βは第二のパラメーターである。
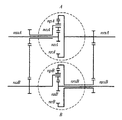
図4〜図28は、本考案の第三の実施形態〜第二十七の実施形態による簡易化並列式独立制御できる伝動機構の並列する二つの遊星歯車セットの組み合わせの内部図であり、二十五種類の組み合わせを含むが、本考案をこれらに限定するものではない。図4〜図28を参照して、本考案の第三の実施形態〜第二十七の実施形態による簡易化並列式独立制御できる伝動機構は、二つの遊星歯車セット(円形の破線で表示され、図3a及び3bと対比して)を備え、その詳しい内部構造は、図3a及び3bに表示されており、その詳細な説明は省略する。
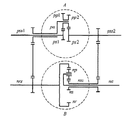
図2a、2b及び4を参照して、本考案の第三の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ正速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つの太陽歯車の回転軸pss1A及びpss1Bは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの中央歯車の回転軸pss2Bが前記第一の遊星歯車セットの中央歯車の回転軸pss2Aに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸paAが前記第二の遊星歯車セットの遊星キャリアの回転軸paBに接続される。前記中央歯車の回転軸pss2A及び遊星キャリアの回転軸paBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び5を参照して、本考案の第四の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつその一つは正速度比を有してもう一つは負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つの太陽歯車の回転軸pss1及びnssは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットのリングギアの回転軸nrsが前記第一の遊星歯車セットの中央歯車の回転軸pss2に接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸paが前記第二の遊星歯車セットの遊星キャリアの回転軸naに接続される。前記中央歯車の回転軸pss2及び遊星キャリアの回転軸naは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び6を参照して、本考案の第五の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつその一つは正速度比を有してもう一つは負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの太陽歯車の回転軸pss1及びリングギアの回転軸nrsは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの太陽歯車の回転軸nssが前記第一の遊星歯車セットの中央歯車の回転軸pss2に接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸paが前記第二の遊星歯車セットの遊星キャリアの回転軸naに接続される。前記中央歯車の回転軸pss2及び遊星キャリアの回転軸naは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び7を参照して、本考案の第六の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つの太陽歯車の回転軸nssA及びnssBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットのリングギアの回転軸nrsBが前記第一の遊星歯車セットのリングギアの回転軸nrsAに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸naAが前記第二の遊星歯車セットの遊星キャリアの回転軸naBに接続される。前記リングギアの回転軸nrsA及び遊星キャリアの回転軸naBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び8を参照して、本考案の第七の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの太陽歯車の回転軸nssA及びリングギアの回転軸nrsBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの太陽歯車の回転軸pssBが前記第一の遊星歯車セットのリングギアの回転軸nrsAに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸naAが前記第二の遊星歯車セットの遊星キャリアの回転軸naBに接続される。前記リングギアの回転軸nrsA及び遊星キャリアの回転軸naBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び9を参照して、本考案の第八の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つのリングギアの回転軸nrsA及びnrsBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの太陽歯車の回転軸nssBが前記第一の遊星歯車セットの太陽歯車の回転軸nssAに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸naAが前記第二の遊星歯車セットの遊星キャリアの回転軸naBに接続される。前記太陽歯車の回転軸nssA及び遊星キャリアの回転軸naBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び10を参照して、本考案の第九の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ正速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つの太陽歯車の回転軸pss1A及びpss1Bは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの遊星キャリアの回転軸paBが前記第一の遊星歯車セットの中央歯車の回転軸pss2Aに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸paAが前記第二の遊星歯車セットの中央歯車の回転軸pss2Bに接続される。前記二つの中央歯車の回転軸pss2A及びpss2Bは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び11を参照して、本考案の第十の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつその一つは正速度比を有してもう一つは負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つの太陽歯車の回転軸pss1及びnssは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの遊星キャリアの回転軸naが前記第一の遊星歯車セットの中央歯車の回転軸pss2に接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸paが前記第二の遊星歯車セットのリングギアの回転軸nrsに接続される。前記中央歯車の回転軸pss2及びリングギアの回転軸nrsは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び12を参照して、本考案の第十一の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつその一つは正速度比を有してもう一つは負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの太陽歯車の回転軸pss1及びリングギアの回転軸nrsは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの遊星キャリアの回転軸naが前記第一の遊星歯車セットの中央歯車の回転軸pss2に接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸paが前記第二の遊星歯車セットの太陽歯車の回転軸nssに接続される。前記中央歯車の回転軸pss2及び太陽歯車の回転軸nssは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び13を参照して、本考案の第十二の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つの太陽歯車の回転軸nssA及びnssBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの遊星キャリアの回転軸paBが前記第一の遊星歯車セットのリングギアの回転軸nrsAに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸paAが前記第二の遊星歯車セットのリングギアの回転軸nrsBに接続される。前記二つのリングギアの回転軸nrsA及びnrsBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び14を参照して、本考案の第十三の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの太陽歯車の回転軸nssA及びリングギアの回転軸nrsBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの遊星キャリアの回転軸naBが前記第一の遊星歯車セットのリングギアの回転軸nrsAに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸naAが前記第二の遊星歯車セットの太陽歯車の回転軸nssBに接続される。前記リングギアの回転軸nrsA及び太陽歯車の回転軸nssBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び15を参照して、本考案の第十四の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つのリングギアの回転軸nrsA及びnrsBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの遊星キャリアの回転軸naBが前記第一の遊星歯車セットの太陽歯車の回転軸nssAに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸naAが前記第二の遊星歯車セットの太陽歯車の回転軸nssBに接続される。前記二つの太陽歯車の回転軸nssA及びnssBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び16を参照して、本考案の第十五の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ正速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの太陽歯車の回転軸pss1A及び遊星キャリアの回転軸paBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの太陽歯車の回転軸pss1Bが前記第一の遊星歯車セットの中央歯車の回転軸pss2Aに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸paAが前記第二の遊星歯車セットの中央歯車の回転軸pss2Bに接続される。前記二つの中央歯車の回転軸pss2A及びpss2Bは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び17を参照して、本考案の第十六の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつその一つは正速度比を有してもう一つは負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの太陽歯車の回転軸pss1及び遊星キャリアの回転軸naは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットのリングギアの回転軸nrsが前記第一の遊星歯車セットの中央歯車の回転軸pss2に接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸paが前記第二の遊星歯車セットの太陽歯車の回転軸nssに接続される。前記中央歯車の回転軸pss2及び太陽歯車の回転軸nssは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び18を参照して、本考案の第十七の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつその一つは正速度比を有してもう一つは負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの太陽歯車の回転軸pss1及び遊星キャリアの回転軸naは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの太陽歯車の回転軸pssが前記第一の遊星歯車セットの中央歯車の回転軸pss2に接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸paが前記第二の遊星歯車セットのリングギアの回転軸nrsに接続される。前記中央歯車の回転軸pss2及びリングギアの回転軸nrsは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び19を参照して、本考案の第十八の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつその一つは正速度比を有してもう一つは負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの遊星キャリアの回転軸pa及び太陽歯車の回転軸nssは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの遊星キャリアの回転軸naが前記第一の遊星歯車セットの中央歯車の回転軸pss2に接続され、前記第一の遊星歯車セットの太陽歯車の回転軸pss1が前記第二の遊星歯車セットのリングギアの回転軸nrsに接続される。前記中央歯車の回転軸pss2及びリングギアの回転軸nrsは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び20を参照して、本考案の第十九の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつその一つは正速度比を有してもう一つは負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの遊星キャリアの回転軸pa及びリングギアの回転軸nrsは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの遊星キャリアの回転軸naが前記第一の遊星歯車セットの中央歯車の回転軸pss2に接続され、前記第一の遊星歯車セットの太陽歯車の回転軸pss1が前記第二の遊星歯車セットの太陽歯車の回転軸nssに接続される。前記中央歯車の回転軸pss2及び太陽歯車の回転軸nssは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び21を参照して、本考案の第二十の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの太陽歯車の回転軸nssA及び遊星キャリアの回転軸naBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットのリングギアの回転軸nrsBが前記第一の遊星歯車セットのリングギアの回転軸nrsAに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸naAが前記第二の遊星歯車セットの太陽歯車の回転軸nssBに接続される。前記リングギアの回転軸nrsA及び太陽歯車の回転軸nssBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び22を参照して、本考案の第二十一の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの太陽歯車の回転軸nssA及び遊星キャリアの回転軸naBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの太陽歯車の回転軸nssBが前記第一の遊星歯車セットのリングギアの回転軸nrsAに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸naAが前記第二の遊星歯車セットのリングギアの回転軸nrsBに接続される。前記二つのリングギアの回転軸nrsA及びnrsBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び23を参照して、本考案の第二十二の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットのリングギアの回転軸nrsA及び遊星キャリアの回転軸naBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットのリングギアの回転軸nrsBが前記第一の遊星歯車セットの太陽歯車の回転軸nssAに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸naAが前記第二の遊星歯車セットの太陽歯車の回転軸nssBに接続される。前記二つの太陽歯車の回転軸nssA及びnssBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び24を参照して、本考案の第二十三の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットのリングギアの回転軸nrsA及び遊星キャリアの回転軸naBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの太陽歯車の回転軸nssBが前記第一の遊星歯車セットの太陽歯車の回転軸nssAに接続され、前記第一の遊星歯車セットの遊星キャリアの回転軸naAが前記第二の遊星歯車セットのリングギアの回転軸nrsBに接続される。前記太陽歯車の回転軸nssA及びリングギアの回転軸nrsBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
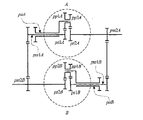
図2a、2b及び25を参照して、本考案の第二十四の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ正速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つの遊星キャリアの回転軸paA及びpaBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの太陽歯車の回転軸pss1Bが前記第一の遊星歯車セットの中央歯車の回転軸pss2Aに接続され、前記第一の遊星歯車セットの太陽歯車の回転軸pss1Aが前記第二の遊星歯車セットの中央歯車の回転軸pss2Bに接続される。前記二つの中央歯車の回転軸pss2A及びpss2Bは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び26を参照して、本考案の第二十五の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつその一つは正速度比を有してもう一つは負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つの遊星キャリアの回転軸pa及びnaは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットのリングギアの回転軸nrsが前記第一の遊星歯車セットの中央歯車の回転軸pss2に接続され、前記第一の遊星歯車セットの太陽歯車の回転軸pss1が前記第二の遊星歯車セットの太陽歯車の回転軸nssに接続される。前記中央歯車の回転軸pss2及び太陽歯車の回転軸nssは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び27を参照して、本考案の第二十六の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つの遊星キャリアの回転軸naA及びnaBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットのリングギアの回転軸nrsBが前記第一の遊星歯車セットのリングギアの回転軸nrsAに接続され、前記第一の遊星歯車セットの太陽歯車の回転軸nssAが前記第二の遊星歯車セットの太陽歯車の回転軸nssBに接続される。前記リングギアの回転軸nrsA及び太陽歯車の回転軸nssBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
図2a、2b及び28を参照して、本考案の第二十七の実施形態において、前記二つの遊星歯車セットは、前記第一の遊星歯車セット1及び前記第二の遊星歯車セット2と関連し、かつ負速度比を有する。二つの遊星歯車セットは、機械的にかつ並列に接続している。前記二つの遊星歯車セットの二つの遊星キャリアの回転軸naA及びnaBは、前記第一の遊星歯車セット1のエネルギー出力端(第一の回転軸OP)または前記第二の遊星歯車セット2の制御端(第一の回転軸CR)に自在になることができる。前記第二の遊星歯車セットの太陽歯車の回転軸nssBが前記第一の遊星歯車セットのリングギアの回転軸nrsAに接続され、前記第一の遊星歯車セットの太陽歯車の回転軸nssAが前記第二の遊星歯車セットのリングギアの回転軸nrsBに接続される。前記二つのリングギアの回転軸nrsA及びnrsBは、前記第一の遊星歯車セット1の第二の回転軸AD(図2aのエネルギー入力端或いは図2bの自由伝送端)または前記第二の遊星歯車セット2の第二の回転軸BD(図2aの自由伝送端或いは図2bのエネルギー入力端)に自在になることができる。
以上本考案を好ましい実施形態に関して説明してきたが、それは本考案を限定するためのものではない。以下の請求項に記載の本考案の主旨及び範囲を逸脱することなく、当業者が、その他の多様な変更及び変形を行いうることは理解できよう。
1 第一の遊星歯車セット
2 第二の遊星歯車セット
OP、CR 第一の回転軸
AD、BD 第二の回転軸
AE、BE 第三の回転軸
ps1、ns 太陽歯車
pss1、nss 太陽歯車の回転軸
ps2 中央歯車
pss2 中央歯車の回転軸
pp1 第一の遊星歯車
pp2 第二の遊星歯車
pa、na 遊星キャリアの回転軸
nr リングギア
nrs リングギアの回転軸
np 遊星歯車
2 第二の遊星歯車セット
OP、CR 第一の回転軸
AD、BD 第二の回転軸
AE、BE 第三の回転軸
ps1、ns 太陽歯車
pss1、nss 太陽歯車の回転軸
ps2 中央歯車
pss2 中央歯車の回転軸
pp1 第一の遊星歯車
pp2 第二の遊星歯車
pa、na 遊星キャリアの回転軸
nr リングギア
nrs リングギアの回転軸
np 遊星歯車
Claims (9)
- エネルギー出力端を有する第一の遊星歯車セットと、
前記第一の遊星歯車セットに機械的にかつ並列に接続し、制御端を有する第二の遊星歯車セットと、
前記第一の遊星歯車セットに設置するエネルギー入力端と、
前記制御端に制御されて前記エネルギー入力端かまたは前記エネルギー出力端に自在に切り替え、前記第二の遊星歯車セットに設置する自由伝送端と、
を備えることを特徴とする簡易化並列式独立制御できる伝動機構。 - 前記第一の遊星歯車セット及び前記第二の遊星歯車セットが正速度比を有し、或いは前記第一の遊星歯車セット及び前記第二の遊星歯車セットが負速度比を有し、或いは前記第一の遊星歯車セットが正速度比を有して前記第二の遊星歯車セットが負速度比を有し、或いは前記第一の遊星歯車セットが負速度比を有して前記第二の遊星歯車セットが正速度比を有することを特徴とする請求項1に記載の簡易化並列式独立制御できる伝動機構。
- 前記第一の遊星歯車セットが第一の回転軸、第二の回転軸及び第三の回転軸を備え、前記第二の遊星歯車セットが第一の回転軸、第二の回転軸及び第三の回転軸を備え、前記第一の遊星歯車セットの前記第一の回転軸が前記簡易化並列式独立制御できる伝動機構のエネルギー出力端であり、前記第一の遊星歯車セットの前記第二の回転軸が前記簡易化並列式独立制御できる伝動機構のエネルギー入力端であり、前記第一の遊星歯車セットの前記第三の回転軸が前記第二の遊星歯車セットに接続され、前記第二の遊星歯車セットの前記第一の回転軸が前記簡易化並列式独立制御できる伝動機構の制御端であり、前記第二の遊星歯車セットの前記第二の回転軸が前記簡易化並列式独立制御できる伝動機構の自由伝送端であり、前記第二の遊星歯車セットの前記第三の回転軸が前記第一の遊星歯車セットに接続されていることを特徴とする請求項1に記載の簡易化並列式独立制御できる伝動機構。
- エネルギー出力端を有する第一の遊星歯車セットと、
前記第一の遊星歯車セットに機械的にかつ並列に接続し、制御端を有する第二の遊星歯車セットと、
前記第二の遊星歯車セットに設置するエネルギー入力端と、
前記制御端に制御されて前記エネルギー入力端かまたは前記エネルギー出力端に自在に切り替え、前記第一の遊星歯車セットに設置する自由伝送端と、
を備えることを特徴とする簡易化並列式独立制御できる伝動機構。 - 前記第一の遊星歯車セット及び前記第二の遊星歯車セットが正速度比を有し、或いは前記第一の遊星歯車セット及び前記第二の遊星歯車セットが負速度比を有し、或いは前記第一の遊星歯車セットが正速度比を有して前記第二の遊星歯車セットが負速度比を有し、或いは前記第一の遊星歯車セットが負速度比を有して前記第二の遊星歯車セットが正速度比を有することを特徴とする請求項4に記載の簡易化並列式独立制御できる伝動機構。
- 前記第一の遊星歯車セットが第一の回転軸、第二の回転軸及び第三の回転軸を備え、前記第二の遊星歯車セットが第一の回転軸、第二の回転軸及び第三の回転軸を備え、前記第一の遊星歯車セットの前記第一の回転軸が前記簡易化並列式独立制御できる伝動機構のエネルギー出力端であり、前記第一の遊星歯車セットの前記第二の回転軸が前記簡易化並列式独立制御できる伝動機構の自由伝送端であり、前記第一の遊星歯車セットの前記第三の回転軸が前記第二の遊星歯車セットに接続され、前記第二の遊星歯車セットの前記第一の回転軸が前記簡易化並列式独立制御できる伝動機構の制御端であり、前記第二の遊星歯車セットの前記第二の回転軸が前記簡易化並列式独立制御できる伝動機構のエネルギー入力端であり、前記第二の遊星歯車セットの前記第三の回転軸が前記第一の遊星歯車セットに接続されていることを特徴とする請求項4に記載の簡易化並列式独立制御できる伝動機構。
- 機械的にかつ並列に接続する二つの遊星歯車セットと、
前記遊星歯車セットに設置するエネルギー出力端と、
前記遊星歯車セットに設置する制御端と、
前記遊星歯車セットに設置するエネルギー入力端と、
前記制御端に制御されて前記エネルギー入力端かまたは前記エネルギー出力端に自在に切り替え、前記遊星歯車セットに設置する自由伝送端と、
を備えることを特徴とする簡易化並列式独立制御できる伝動機構。 - 前記二つの遊星歯車セットが正速度比を有し、或いは前記二つの遊星歯車セットが負速度比を有し、或いは前記遊星歯車セットの一つが正速度比を有して前記遊星歯車セットのもう一つが負速度比を有することを特徴とする請求項7に記載の簡易化並列式独立制御できる伝動機構。
- 前記二つの遊星歯車セットが第一の回転軸、第二の回転軸、第三の回転軸、第四の回転軸、第五の回転軸及び第六の回転軸を備え、前記第一の回転軸が前記簡易化並列式独立制御できる伝動機構のエネルギー出力端であり、前記第二の回転軸が前記簡易化並列式独立制御できる伝動機構のエネルギー入力端であり、前記第三の回転軸が前記二つの遊星歯車セットの間に接続され、前記第四の回転軸が前記簡易化並列式独立制御できる伝動機構の制御端であり、前記第五の回転軸が前記簡易化並列式独立制御できる伝動機構の自由伝送端であり、前記第六の回転軸が前記二つの遊星歯車セットの間に接続されることを特徴とする請求項7に記載の簡易化並列式独立制御できる伝動機構。
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP3172334U true JP3172334U (ja) | 2011-12-15 |
Family
ID=
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5302331B2 (ja) | ハイブリッドトランスミッション | |
| JP5678299B2 (ja) | ハイブリッド車両の変速機 | |
| KR101847312B1 (ko) | 자동 변속기 | |
| US8469850B2 (en) | Superposition transmission | |
| US8585532B2 (en) | Independently controllable transmission mechanism with series types | |
| US8585533B2 (en) | Independently controllable transmission mechanism with simplified parallel types | |
| JP5257118B2 (ja) | ハイブリッド車両の駆動装置 | |
| US8585531B2 (en) | Independently controllable transmission mechanism with an identity-ratio series type | |
| CN104373526A (zh) | 一种动力换挡变速器 | |
| US8585530B2 (en) | Independently controllable transmission mechanism | |
| JP2011122684A (ja) | 無段変速機 | |
| CN102748435A (zh) | 一种基于双制动器的行星齿轮变速器 | |
| JP6078401B2 (ja) | 車両の駆動装置 | |
| CN102011840A (zh) | 可独立控制传动机构 | |
| CN103486207B (zh) | 一种连续动力无级变速传动机构 | |
| JP3172334U (ja) | 簡易化並列式独立制御できる伝動機構 | |
| JP3172332U (ja) | 単位比率シリーズ式独立制御できる伝動機構 | |
| JP3172333U (ja) | シリーズ式独立制御できる伝動機構 | |
| JP4930267B2 (ja) | ハイブリッド車の駆動装置 | |
| KR101510049B1 (ko) | 차량의 하이브리드 파워트레인 | |
| TWI411735B (zh) | 精簡並聯型可獨立控制傳動機構 | |
| JP2011112130A (ja) | 動力伝達装置 | |
| CN102954159B (zh) | 精简并联型可独立控制传动机构 | |
| TWI421424B (zh) | 序列型可獨立控制傳動機構 | |
| JP5204047B2 (ja) | 車両の駆動装置 |