JP3105668U - 動力発生装置 - Google Patents
動力発生装置 Download PDFInfo
- Publication number
- JP3105668U JP3105668U JP2003273403U JP2003273403U JP3105668U JP 3105668 U JP3105668 U JP 3105668U JP 2003273403 U JP2003273403 U JP 2003273403U JP 2003273403 U JP2003273403 U JP 2003273403U JP 3105668 U JP3105668 U JP 3105668U
- Authority
- JP
- Japan
- Prior art keywords
- rotating body
- cylinder
- piston
- liquid
- roller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G7/00—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for
- F03G7/10—Alleged perpetua mobilia
- F03G7/104—Alleged perpetua mobilia continuously converting gravity into usable power
- F03G7/107—Alleged perpetua mobilia continuously converting gravity into usable power using an imbalance for increasing torque or saving energy
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G3/00—Other motors, e.g. gravity or inertia motors
- F03G3/087—Gravity or weight motors
- F03G3/091—Gravity or weight motors using unbalanced wheels
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G7/00—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for
- F03G7/04—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for using pressure differences or thermal differences occurring in nature
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Other Liquid Machine Or Engine Such As Wave Power Use (AREA)
Abstract
【課題】構造及び作動原理が簡単で、容易に実施し得る機構とした、クリーンで経済性のある動力発生装置を提供する。
【解決手段】内部に液体が封入された回転体1と、回転体1の外周に等間隔を空けて設けられた2以上の作動機3と、ローラ11が転動するガイドレール41と、を備える。回転体1の上部に位置する少なくとも1の作動機のシリンダ7内を真空にして、その真空圧と大気圧との差圧をピストンに作用させると共に、ローラ11をガイドレール41に係合させ、それによって、回転体1に回転力を付与する。
【選択図】図1
【解決手段】内部に液体が封入された回転体1と、回転体1の外周に等間隔を空けて設けられた2以上の作動機3と、ローラ11が転動するガイドレール41と、を備える。回転体1の上部に位置する少なくとも1の作動機のシリンダ7内を真空にして、その真空圧と大気圧との差圧をピストンに作用させると共に、ローラ11をガイドレール41に係合させ、それによって、回転体1に回転力を付与する。
【選択図】図1
Description
本考案は、真空圧と大気圧との差圧によって動力を発生させる装置に関する。
この種の動力発生装置として、液体の重量と大気圧とを利用してトリチェリーの真空を形成し、その真空圧と大気圧との差圧によって動力を発生させる装置が知られている(例えば特許文献1及び2参照)。
この特許文献に開示された装置は、U型作動管を複数備えている。各作動管内には水銀等の液体が収容されると共に、その上端部にピストンが気密状態を保って摺動自在に嵌合されている。複数の作動管はそれぞれクランク軸に連結されており、各作動管はクランク軸の回転に伴い起倒する。作動管は起立してほぼ垂直を向いたときに、液体の重力によってピストンの下方にトリチェリーの真空が形成される。この真空によってピストンが作動管内に引き込まれる力を利用してクランク軸を回転させる。クランク軸の回転に伴い作動管は倒伏し、倒伏した作動管のピストンは液体の重量によって押し戻される。作動管はピストンが押し戻された状態でクランク軸の回転と共に再び起立し、その作動管内には再びトリチェリーの真空が形成される。このように前記装置は、複数の作動管が前記の起倒動作を、位相を異ならせて繰り返すことによって、クランク軸を連続して回転させる。
特開平8−159007号公報(第1図、第2図)
米国特許第5671602号明細書(第1図、第2図)
しかし、前記特許文献に開示されている装置は、複数の作動管と、それらを位相を異ならせて倒伏させる機構とが必要であるため、構造が複雑であるという問題がある。
また、起倒動作に伴う各作動管内での液体の移動によって、その重心位置が移動するため、クランク軸の回転バランスが崩れてしまうという問題もあり、再三の試作にも拘わらず実用化されていない。
本考案は、従来の技術が有する前記のような問題点に鑑み、構造及び作動原理が簡単で、容易に実施し得るようにした、クリーンで経済性のある動力発生装置を提供することを目的とする。
本考案の動力発生装置は、真空圧と大気圧との差圧によって動力を発生させる装置である。この装置は、架台と、架台に対し軸支されて水平軸回りの一方向に回転する、内部に液体が封入された回転体と、前記回転体の外周に等間隔を空けて設けられた2以上の作動機と、前記回転体の上方位置を開始端として、そこから該回転体の回転方向下方の終了端まで傾斜して設けられたガイドレールと、を備え、前記各作動機は、前記回転体の外周に設けられて該回転体内に連通するシリンダと、前記シリンダに内挿されて、上端点と下端点との間をシリンダ軸線方向に往復動するピストンと、前記ピストンに連結されたピストンロッドと、前記ピストンロッドの先端部に取り付けられて、前記ガイドレール上を転動するローラと、前記作動機を、前記ピストンが上端点で固定されてその往復動を規制した固定状態と、その往復動を許容した可動状態と、に切り替えるロック機構と、を有する。
前記装置は、前記回転体の上部に位置する少なくとも1の作動機のシリンダ内に液面が形成されるように前記回転体及び各シリンダの内部に前記液体を封入すると共に、前記シリンダ内における前記液面よりも上方を真空にした状態を初期状態とする。そして、前記シリンダ内に真空が形成された作動機を、前記ロック機構によって可動状態に切り替えて、前記シリンダの上端点に位置するピストンを真空圧と大気圧との差圧によってシリンダ内に引き込む第1ステップと、前記可動状態に切り替えられた作動機のローラを、前記ガイドレールの開始端近傍に係合させる第2ステップと、前記ローラがガイドレールに係合することによって、当該作動機のシリンダがピストンに対し相対的に移動して、前記回転体に回転力が付与される第3ステップと、前記シリンダの相対移動が継続し、それによって回転体が回転するに伴い、前記ローラが前記ガイドレール上を転動する第4ステップと、前記ローラが前記ガイドレールの終了端に到達すると共に、前記ピストンがシリンダの下端点に位置し、さらに前記シリンダが前記液面よりも下方に位置することによって、そのシリンダ内の真空が消滅する第5ステップと、前記ローラが前記ガイドレールの終了端から離れた後に、前記ピストンが液体及びピストン・ピストンロッド・ローラの重量によって当該シリンダの上端点まで移動する第6ステップと、前記上端点までピストンが移動した作動機を、前記ロック機構によって固定状態に切り替える第7ステップと、前記固定状態に切り替えられた作動機が、前記回転体の回転に伴い前記液面よりも上方に移動して、そのシリンダ内に再び真空が形成される第8ステップと、の各ステップを前記複数の作動機が順に繰り返す。このことによって、前記回転体を回転させる。
前記各作動機のシリンダは、前記回転体の外周面から放射方向に突出する基部と、該基部の外端部において折曲されて前記回転体の回転方向に延びる作動部と、を含むものとして、前記ピストンは、前記作動部内を往復動させてもよい。
また、前記各作動機のシリンダは前記回転体の外周面から放射状に、直線状に設けることもできる。この場合、ガイドレールは、前記回転体の上方位置を開始端として、そこから該回転体の回転方向下方の終了端まで傾斜して設ける。
前記動力発生装置は、少なくとも1の作動機のシリンダに連通するエア抜き管と、前記回転体の外周面の、前記エア抜き管に近接する位置に設けた給液管と、をさらに備えてもよい。このときに、前記給液管の開口端は、それを前記回転体の頂部に位置させたときに前記エア抜き管の開口端よりも上位に位置させることが好ましい。
前記ロック機構は、作動レバーを有するものとして、前記動力発生装置は、前記回転体の上部近傍位置に設けられて、前記作動機が固定状態から可動状態に切り替わるように前記作動レバーを操作するロック解除手段と、前記回転体の下部近傍位置に設けられて、前記作動機が可動状態から固定状態に切り替わるように前記作動レバーを操作するロック作動手段と、をさらに備えてもよい。さらに、作動レバーの作動を電磁接点作用方式とすることもできる。
前記動力発生装置は、前記回転体に初動回転力を付与する始動装置をさらに備えてもよい。また、前記動力発生装置は、前記回転体の回転速度を一定速度にする定速装置をさらに備えてもよい。
前記動力発生装置を製造する方法は、以下の(a)〜(g)のステップを含む。すなわち、(a)回転体内に連通する2以上のシリンダを、当該回転体の外周に等間隔を空けて設けるステップ、(b)ピストンロッドの先端部にローラを取り付けると共に、そのピストンロッドをピストンに連結するステップ、(c)前記各シリンダに前記ピストンを内挿するステップ、(d)前記各シリンダに、前記ピストンをシリンダの上端点で固定してその往復動を規制した固定状態と、その往復動を許容した可動状態と、に切り替えるロック機構を設けるステップ、(e)前記回転体を、水平軸回りの一方向に回転するように架台に対し軸支するステップ、(f)前記回転体の上方位置を開始端として、そこから該回転体の回転方向下方の終了端まで傾斜するガイドレールを設けるステップ、(g)前記回転体の上部に位置する少なくとも1の作動機のシリンダ内に液面が形成されるように前記回転体及び各シリンダの内部に前記液体を封入すると共に、前記シリンダ内における前記液面よりも上方を真空にするステップ。
本考案の動力発生装置によれば、作動機のシリンダ内を真空にし、ローラをガイドレールに係合させることによって、その真空圧と大気圧との差圧を回転体の回転力に変換する。この回転動力は大気圧をエネルギーとして発生させたものであって、クリーンなエネルギーであり、環境汚染のおそれが全くない。しかも、構造及び作動原理が簡単で、容易に実施することができる。
また、前記エア抜き管及び給液管を備えることによって、装置の初期状態をより容易に作り出すことができる。つまり、給液管及びエア抜き管を回転体の頂部に位置させると共に、エア抜き管を開いた状態にして、前記給液管から回転体内に液体を供給する。このことによって、回転体内及び各シリンダ内に完全に液体を満たすことができる。そうした後に、給液管及びエア抜き管を密閉し、回転体の下部に位置する給液管を開く。こうして液体を回転体の外部に放出することによって、回転体の上部に位置するシリンダ内に、トリチェリーの真空と同様の真空を形成することができる。また、エア抜き管及び給液管はそれぞれ、各シリンダに連通する連通管に対して連通させることができる(給液管は回転体にも連通させる)。この場合、エア抜き管及び給液管は連通管を介して互いに連通し、エア抜き管及び給液管は共にシリンダに連通する。連通管には各シリンダ内に混入した空気が集められる。
さらに、前記回転体の上部近傍位置にロック解除手段を、その下部近傍位置にロック作動手段を備えることによって、回転体の回転に伴い、回転体の上部近傍位置で各作動機を固定状態から可動状態に切り替え、回転体の下部近傍位置で各作動機を可動状態から固定状態に切り替えることができる。それによって、前記の第1ステップと第7ステップとをそれぞれ自動的に行うことができる。
加えて、始動装置を備えることによって、動力発生装置を確実に始動することができ、定速装置を備えることによって、発電機用の回転動力として最適化することができる上に、各作動機に作用する遠心力が増大することによる不具合を未然に防止することができる。
従って、本考案の動力発生装置は、新エネルギーとして従来の種々のエネルギーに代わって利用する可能性がある。しかも、エネルギー源は無制限であり経済性にも優れる。また、そのエネルギー源は安定供給である。
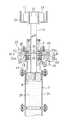
以下、本考案の一実施形態を、図面に基づいて説明する。図1〜図4は、本考案の一実施形態を示す。
同図において、1は、中心軸線を水平とした回転体であって、その内部は気密及び液密状態にされている。また、前記回転体1の中心には、水平方向の延びる出力軸2が貫通している。前記出力軸2は、回転体1を挟んだ前後一対の軸受43を介して架台4に支持されていて、これにより前記回転体1は、水平軸回りに回転する。
前記出力軸2の端部には、平歯車、チェーンスプロケット、プーリ等からなる第1伝動車5及び第2伝動車6が取り付けられている。第1伝動車5は、例えば発電機等の被駆動手段(図示省略)に、出力軸2の回転力を伝えるものであり、回転体1の回転速度を一定にするための定速装置(図示省略)が連結される。定速装置は種々の方式のものが採用可能である。一方、第2伝動車6は、前記回転体1の始動時に初期回転力を付与するための始動装置(図示省略)が連結される。第1伝動車5と被駆動手段との間には、必要に応じて動力伝達を遮断するクラッチを設けてもよい。
前記回転体1の外周には、2以上(図例では8基)の作動機3が等間隔を空けて設けられている。各作動機3は、後述するようにシリンダ7、ピストン9、ピストンロッド10、ローラ11、ロック機構13を含む。
前記回転体1の外周面1aには、互いに同一形状を有する複数(図例では8個)のシリンダ7が、円周方向に等間隔でかつ、外周面1aに対して等角度をもって設けられている。各シリンダ7は、前記回転体1の内部と連通している。各シリンダ7は、前記回転体1の外周面1aから放射方向に延出する基部7aと、この基部7aの端部から回転体1の回転方向に延びる作動部7bとからなり、正面視でL字状に屈曲している。前記作動部7bの遊端部は、回転体1の外周面1aから放射方向に延出する支持杆8によって支持されている。
前記各シリンダ7の作動部7bにはピストン9が内嵌していて、シリンダ7及び、それに連なる回転体1内を気密及び液密状態にしている。前記ピストン9は、作動部7bの軸線方向最外方位置である上端点と、最内方位置である下端点との間を軸線方向に往復動する。
このピストン9には、各シリンダ7の作動部7bから軸線方向の外方に突出するピストンロッド10の一端が連結されている。このピストンロッド10の他端部には、1対のローラ11,11が、前記出力軸2と同じ前後方向に延びる軸12に軸支されている。
各シリンダ7の作動部7bの遊端部には、前記ピストン9が上端点に位置した状態で、そのピストン9及びピストンロッド10を固定するロック機構13が設けられている。
このロック機構13は、各シリンダ7の作動部7bの遊端に接続された筒体14と、前記各ピストンロッド10の中間部に設けられた1対のローラ16と、前記筒体14内の中間部に設けられた反転板19と、前記反転板19の外周面に突設された1対のピン状の作動レバー21,22とを含む。
前記筒体14には、その下部に空気口44が設けられていて、これによりピストン9に対して大気圧が作用する。
前記ローラ16は、前記ピストンロッド10の中間部に、その径方向に突設された1対の軸15のそれぞれに軸支されていて、前記ピストン9が上端点に位置した状態では前記反転板19の上方に位置する。ローラ16は、前記反転板19の上方位置において、後述するロック機構によって固定される。
前記反転板19は、上下1対のスラストベアリング17,17に挟持されることによって前記筒体14に収められていて、前記筒体14の軸周りに反転自在でかつ、その軸線方向には移動不能とされている。また、前記反転板19には、図4に示すように、その中央部に通過孔18が穿設されていて、この通過孔18は、反転板19の反転に伴い反転する。以下、前記通過孔18が図4に実線で示す向きとなった位置を、ロック機構13のロック位置と呼び、前記通過孔18が図4に仮想線で示す向きとなった位置を、ロック機構13のロック解除位置と呼ぶ。
前記作動レバー21,22は、前記筒体14の外周面に形成された長孔20を通ってその筒体14の外方に突出している。後述するように、この作動レバー21,22を動かすことによって反転板19を反転させ、それによって、前記ロック機構13をロック位置とロック解除位置とに切り替える。この作動レバー21,22の先端には、その軸線回りに回転するローラ21a,22aを設けるのが好ましい。
前記ロック機構13が、図4に仮想線で示すロック解除位置に位置しているときには、軸15及びローラ16は、通過孔18内を通過することができ、それに伴いピストンロッド10及びピストン9は、シリンダ7の作動部7bの軸線方向に往復動することができる。つまり、その作動機3は、可動状態になる。
一方、前記ロック機構13が、図4に実線で示すようなロック位置に位置しているときには、通過孔18が軸15及びローラ16の移動軌跡から外れ、軸15及びローラ16が前記通過孔18内を通過することができなくなる。従って、前記ピストン9が上端点に位置した状態で、反転板19をロック位置に位置付けることによって、ピストン9は、シリンダ7の内方へ移動することができなくなる。つまり、その作動機3は、固定状態になる。
前記ロック機構13は、回転体1の下方位置において架台4に取り付けられロック作動手段23によって、ロック解除位置からロック位置に切り替えられる。また、前記ロック機構13は、回転体1の上方位置において前記架台4に取り付けられたロック解除手段24によって、ロック位置からロック解除位置に切り替えられる。
本実施の形態では、前記ロック作動手段23は、傾斜面25aを有する傾斜カム25によって構成されている。この傾斜カム25は、回転体1の下方に相当する位置で前記架台4に対し固着されている。傾斜カム25は、ロック作動用の作動レバー21の移動軌跡上に位置しており、図6に示すように、前記回転体1の回転に伴いその下部に到達したシリンダ7のロック作動用の作動レバー21は、前記傾斜カム25の傾斜面25aに当接する。こうして、回転体1の回転に伴い作動レバー21は傾斜面25aに沿って移動して、その作動レバー21の移動に伴って反転板19が反転する。その結果、ロック機構13がロック位置に切り替わる。
また、本実施の形態では、前記ロック解除手段24も、傾斜面27aを有する傾斜カム27によって構成されている。この傾斜カム27は、回転体1の上方に相当する位置で架台4に設けられた電磁ソレノイド26のプランジャ26aに固着されている。図5に示すように、前記電磁ソレノイド26が励磁されている状態で、前記傾斜カム27は、ロック解除用の作動レバー22の移動軌跡上に位置し、電磁ソレノイド26が消磁された状態で、前記傾斜カム27は前記作動レバー22の移動軌跡上から外れる。これにより、前記傾斜カム27を前記移動軌跡上に位置させた状態では、前記回転体1の回転に伴い、その上部に到達したシリンダ7のロック解除用の作動レバー22が傾斜面27aに当接する。このことにより、反転板19が回動して、ロック機構13がロック解除位置に切り替わる。
尚、ロック作動手段23及びロック解除手段24は、前記の構成に限らず、例えば電磁ソレノイド等により、作動レバー21,22を直接動かすものとしてもよい。この場合、作動レバー21,22が予め定めた位置に到達したことを、非接触式センサにより検知して前記電磁ソレノイドを作動させることによって、前記作動レバー21,22を動かすことが好ましい。
前記回転体1内には液体29が封入されている。また、8基のシリンダ7の内、その上部に位置する1又は2基のシリンダ7内には真空28が形成され、その他のシリンダ7内には液体が封入される。
前記回転体1の外周面1aの一部には、大口径の注液口31が設けられている。この注液口31には、開閉弁30が設けられる。注液口31は、回転体1及び各シリンダ7内に液体29を供給するための口である。
また、各シリンダ7には、接続管32の内端が接続されている。接続管32は、シリンダ7が前記回転体1の頂部に位置したときに、その最上部となる部分に接続されている。径方向に延びる各接続管32の外端部は、出力軸2を中心とする環状の連通管33に接続されている。各シリンダ7の内部は、接続管32を介して連通管33に連通されている。
前記環状の連通管33には、2つのエア抜き管35,35が連通している。エア抜き管35,35は、互いに180°だけ間を空けて配置されていて、それぞれ回転体1の径方向の外方に延びている。各エア抜き管35は、開閉弁34を備えている。
前記各エア抜き管35に近接する回転体1の外周面1aには、給液管37が設けられている。各給液管37は、回転体1の径方向の外方に延びていて、開閉弁36を有している。この各給液管37の長さは、エア抜き管35の長さよりも長く、給液管37をほぼ真上に向けたときには、その開口端が、エア抜き管35の開口端よりも上方に位置する。
前記液体29としては、水銀、水、重水、その他のあらゆる液体を使用することが可能である。特に、比重が大で、かつ粘性の小さい液体であることが好ましい。この例では、液体29を水とする。
回転体1の上部に位置するシリンダ7の基部7aから上方に真空28が形成されるように回転体1内に液体29を封入するには、次のような要領で回転体1内に液体29を供給するのがよい。
すなわち、注液口31が真上を向くようにして、回転体1を停止させておき、その開閉弁30と、それに近接するエア抜き管35の開閉弁34又は給液管37の開閉弁36とを開放し、それら以外の弁34,35は閉じておく。
この状態で、注液口31より給液を開始し、回転体1内が液体29でほぼ満たされた後に、注液口31の弁30を閉じる。そして、その注液口31に近接するエア抜き管35と給液管37とが真上を向くように回転体1を若干回転させた後、その位置で回転体1を停止させる。
次いで、上方に位置するエア抜き管35の開閉弁34と給液管37の開閉弁36とを共に開いて、前記給液管37より再度液体29を注入する。これによって、最初の給液時に満たされなかった回転体1の上部とそれより上方に位置するシリンダ7、接続管32、連通管33にも、液体29が確実に充填される。エア抜き管35から液体29が溢れた時点で、液体29の注入を停止し、エア抜き管35の弁34と給液管37の弁36とを閉じる。
その後、真下に位置する給液管37の弁36を開いて、回転体1の下端よりその中の液体29を、シリンダ7の基部7aから回転体1の外周部までの適宜の範囲に跨るように設けておいた液面計38の液面42まで排出する。こうすることで、回転体1の上部に位置するシリンダ7に、トリチェリーの真空が形成される。
液体29の液面が、符号42の位置まで下降したとき、真下の給液管37の弁36を閉じ、液体29の液面の高さをその位置に固定する。
こうして、回転体1内に液体29を封入すると共に、その上部に位置する1又は2基のシリンダ7内に真空28を形成することができる。この状態を、本装置の初期状態とする。
前記回転体1の上部に位置するシリンダ7の基部7aから上方にトリチェリーの真空と同様の真空28を形成するためには、回転体1の直径Dを、少なくとも液体29の1気圧相当高さより大とする必要がある。液体29が水であるときには、回転体1の内径Dは、10.34mより大としなければならず、液体29が水銀であるときには、回転体1の内径Dは、0.76mより大としなければならない。この例では、液体29が水であるため、回転体1の内径Dを30mに設定している。
尚、回転体1内に液体29を封入する手順は、前記には限らない。例えば、液体29の液面が、所定の位置になるように回転体1内に液体29を注入して密閉し、その後、回転体1の上部に位置するシリンダ7内の空気を、例えば真空ポンプを利用して排出することによって、そのシリンダ7内に真空28を形成してもよい。
前記連通管33の一部には、真空計39が開閉弁40を介して接続されている。この弁40は、通常の作動時には密閉される。真空計39は、装置の定期検査時等に、回転体1内の真空度を検出するものである。具体的には、真空計39がほぼ真上に位置するように回転体1を停止し、その状態で、開閉弁40を開いたときの真空計39の計測値を読みとる。その計測値に基づいて、回転体1、各シリンダ7及びそれに連通している連通管33内に、空気が侵入したか否かを検出することができる。真空計39によって検出される真空度が予め設定した値より低下した場合、又は、回転体1から液体29が漏出する等によって、液面計38により検出される液体29の液面が予め定めた値より下降した場合等には、上述したように、エア抜き管35と給液管37とを用いて、回転体1内の液体29の入れ直しを行う。そうすることによって、装置は初期状態に戻される。
図1及び図3に示すように、架台4には、断面L宇状の1対の部材からなるガイドレール41が固着されている。ガイドレール41は、回転体1のほぼ真上位置を開始端として、そこから終了端まで右側方に下向きに傾斜して配置されている。回転体1の上部に位置する作動機3のローラ11はこのガイドレール41上を転動する。ガイドレール41は、ローラ11の転動面における全ての点の接線が、その各点から出力軸2の中心に向かって引いた法線と直交する直線に対して常に同一の右下向き傾斜角をなす弧状とするのが好ましい。ガイドレール41の長さは、ローラ11が出力軸2を中心として、45°以上回動する範囲よりも長く設定する。図例では、ローラ11が出力軸2を中心として約67.5°回動する長さに設定されている。ガイドレール41の長さと、その下向き傾斜角との関係は反比例の関係にあるため、ガイドレール41の長さに応じて、そのガイドレール41の湾曲形状が設定される。
次に、この動力装置の動作について説明する。上述したように、初期状態では、全ての弁30,34,36,40は閉じられ、回転体1及び連通管33内の液体29の液位42は、図1に示すように設定されている。その液位42よりも上方のシリンダ7内には、真空28が形成されている。図1では、回転体1の頂部に位置するシリンダ7内と、それの左隣に位置するシリンダ7内とに真空28が形成されている。
また、全ての作動機3は、ロック機構13によって固定状態にされている。
この初期状態から、第2伝動車6に接続された始動装置によって、回転体1に初期回転力を付与する。これにより、回転体1は回転を開始する。また、ロック解除手段24における電磁ソレノイド26を励磁して傾斜カム27をレバー22の移動軌跡上に位置させる。これにより、回転体1の回転に伴い、ロック解除手段24を通過した作動機3は、固定状態から可動状態に切り替えられる。この可動状態に切り替えられた作動機3のシリンダ7内には、真空28が形成されているため、そのピストン9に対しシリンダ7内外の差圧が作用する。それにより、ピストン9がシリンダ7内に引き込まれ、それに伴うピストンロッド10の移動により、その先端に設けられたローラ11がガイドレール41の開始端近傍に圧接する。ローラ11がガイドレール41に係合することによって、ピストン9がシリンダ7内に引き込まれることが規制され、代わりにシリンダ7がピストン9に対して相対的に移動をする。その結果、回転体1に右方への回転力が付与される。
前記回転体1の回転に伴いローラ11はガイドレール41に沿って転動するが、その間にシリンダ7は、ピストン9が作動部7bの下端点に位置するまで、ピストン9に対する相対的な移動を継続する。そうして、ピストン9が下端点に位置しかつ、回転体1の回転によって作動機3が液位42よりも下方位置に移動することによって、そのシリンダ7内の真空は消滅する。その時点で、ローラ11がガイドレール41の終了端に達し、その後、ローラ11はガイドレール41から離れる。
1個のローラ11がガイドレール41上を転動する角度は、上述したように、約67.5°に設定されているのに対し、隣り合う作動機3の間の角度は、45°に設定されている。このため、1個のローラ11がガイドレール41から離れる前に、次のローラ11がガイドレール41の左端部上に位置する。こうして、回転体1が回転している間は、前記ガイドレール41上は少なくとも1つのローラ11が常に転動して、前記と同様の動作を繰り返すため、回転体1には、右方への回転力が連続して付与される。
前記ローラ11がガイドレール41から離れた後は、その作動機3が回転体1と共に右下方に回転し、その間にピストン9は、回転体1内の液体29の重量及びピストン9・ピストンロッド10・ローラ11の重量によって上端点まで押し戻される。つまり、液位42からピストン9までの距離Hを10m以上に設定しておくことによって、液体29とピストン9・ピストンロッド10・ローラ11との重量によって大気圧に抗してそのピストン9を押し戻すことが可能になる。
作動機3に設けた作動レバー21が、回転体1のほぼ真下の位置に到達すると、その位置に設けられたロック作動手段23の傾斜カム25にそのローラ21aが乗り上がる。このことによって、作動レバー21が動かされて、作動機3は可動状態から固定状態に切り替えられる。
その後、固定状態に切り替えられた作動機3は、回転体1の回転に伴い左上方に移動し、回転体1の上部に位置する。そうして、シリンダ7が液位42を超えると、シリンダ7内に真空28が漸次形成される。この間、作動機3は固定状態であるため、ピストン9がシリンダ7内に引き込まれることはない。
そうして、前記のロック解除手段24によって作動機3が固定状態から可動状態に切り替えられると共に、その作動機3のローラ11が、ガイドレール41の開始端に再び係合する。以後、その作動機3は、前記と同様の作動を繰り返す。
回転体1が定常回転状態となれば、始動装置は停止させる。回転体1は定速装置によって一定速度で回転する。
前記回転体1を停止させるときには、前記ロック解除手段24の電磁ソレノイド26を消磁して傾斜カム27をレバー22の移動軌跡上から外した状態にする。そのことによって、各作動機3は可動状態に切り替わらなくなり、回転体1に回転力が付与されなくなる。それによって、前記回転体1は停止することになる。
前記回転体1の回転動力は、出力軸2から第1伝動車5を介して取り出される。この回転動力は、真空圧と大気圧との差圧を回転力に変換したもので、クリーンで環境汚染のおそれが全くない。
本装置の作動中に各シリンダ7内に侵入した空気は、作動機3がガイドレール41の終了端の近傍に位置しているときにそのシリンダ7の折曲部分に溜り(つまり、折曲部分が上部に位置したときに折曲部分に空気が溜る)、そこに接続された接続管32を介して連通管33に集められ、連通管33の上部に溜まる。
尚、前記実施形態においては、各シリンダ7を、基部7aと作動部7bとが折曲した形状としたが、基部7aと作動部7bとは直線状に形成してもよい。図示は省略するが、直線状に形成した各シリンダ7は回転体1の外周面から放射状に設けることもできる。各シリンダ7を放射状に設けた場合、ガイドレールは、前記回転体の上方位置を開始端として、そこから該回転体の回転方向下方の終了端まで傾斜して設ける。この構成でも、各作動機3のピストン9に作用する真空圧と大気圧との差圧を、回転体1の回転力に変換することができる。
また、基部7aと作動部7bとは互いに直交させなくても、所定の角度で折曲させてもよい。折曲角度は、任意の角度を採用可能である。
また、必要に応じてバランスウエイト等を利用して、回転体1を含む全回転部材の重心を、出力軸2の中心と一致させてもよい。
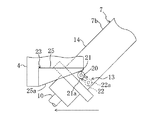
次に、前記の動力発生装置の具体的な計算例を示す。図7〜図10は、図1に示した装置と同一の構成に、計算上用いる符号を記入した図である。同図における符号を表1にまとめて示す。

尚、図7〜図10においては、便宜上、ガイドレールの開始端に位置するローラ及びそれを含む作動機をR1と示し、そこから、回転体の回転方向順に各作動機を、R2,R3,R4,R5,R6,R7,R8と示す。また、図7の仮想線は同図の実線で示す状態から回転体が22.5°回転したときの状態、及び図10は図9に示す状態から回転体が22.5°回転したときの状態、をそれぞれ示しているが、その状態での各作動機を、R1.5,R2.5,R3.5,R4.5,R5.5,R6.5,R7.5,R8.5と示す。また、R1.25は、R1とR1.5との中間位置を、R1.75は、R1.5とR2との間位置を、R2.25は、R2とR2.5との中間位置を、それぞれ示す。
1.装置の諸元
次に、本装置の諸元を表2にまとめて示す。
次に、本装置の諸元を表2にまとめて示す。
2.各作動機の作動力
本計算では、シリンダ内部を完全な真空とみなす。各作動機の作動力、つまりシリンダの軸線方向に作用する力は、内部の真空に対する大気圧によって発生する。ここで、表2によりピストンの直径は2m、断面積は3.14m2であるため、その大気圧による力P0は、式1により算出される。
P0=ピストンの断面積×大気圧
=3.14(m2)×1.0×105(Pa)=3.14×105(N) (式1)。
本計算では、シリンダ内部を完全な真空とみなす。各作動機の作動力、つまりシリンダの軸線方向に作用する力は、内部の真空に対する大気圧によって発生する。ここで、表2によりピストンの直径は2m、断面積は3.14m2であるため、その大気圧による力P0は、式1により算出される。
P0=ピストンの断面積×大気圧
=3.14(m2)×1.0×105(Pa)=3.14×105(N) (式1)。
また、ピストンの摺動抵抗P2は、抵抗係数を0.1と仮定して、式2により算出される。
P2=P0×0.1=(3.14×105)×0.1=3.14×104(N) (式2)。
P2=P0×0.1=(3.14×105)×0.1=3.14×104(N) (式2)。
従って、作動機1基あたりの作動力P3は、P0からP2を差し引いて、式3により算出される。
P3=P0−P2=3.14×105 − 3.14×104=2.83×105(N) (式3)。
P3=P0−P2=3.14×105 − 3.14×104=2.83×105(N) (式3)。
3.回転体の回転モーメント
次に、各作動機の作動力によって回転体に付与される回転モーメントを求める。ここで、本装置は、回転体の回転に伴い、図7に実線で示す第1状態と、同図に仮想線で示す第2状態を繰り返す。この第1状態では、R1の作動機とR2の作動機との2基の作動機のシリンダ内に真空が形成される。一方、第2状態では、R1.5の作動機のシリンダ内に真空が形成される。R2.5の作動機はシリンダ内の真空が消滅している。
次に、各作動機の作動力によって回転体に付与される回転モーメントを求める。ここで、本装置は、回転体の回転に伴い、図7に実線で示す第1状態と、同図に仮想線で示す第2状態を繰り返す。この第1状態では、R1の作動機とR2の作動機との2基の作動機のシリンダ内に真空が形成される。一方、第2状態では、R1.5の作動機のシリンダ内に真空が形成される。R2.5の作動機はシリンダ内の真空が消滅している。
従って、第1状態から第2状態に移行する間は、2基の作動機の作動力が回転体に付与され、第2状態から第1状態に移行する間は、1基の作動機の作動力が回転体に付与される。そこで、第1状態から第2状態に移行する間の回転モーメントと、第2状態から第1状態に移行する間の回転モーメントとの平均によって、回転体に付与される軸心周りの回転モーメントを近似することができる。
尚、図8に示すように、作動機の作動力P3は、シリンダの軸線方向に、シリンダと、ローラ・ガイドレールとの双方に作用する。この内、シリンダに作用する力P3は、軸心に向かって引いた法線に対し直交する。このため、シリンダに作用する力P3は回転体の回転モーメントに寄与する。これに対し、ローラ・ガイドレール間に作用する力P3は、ガイドレールの転動面に沿う方向の分力(分力1)と転動面に直交する方向の分力(分力2)とに分けることができるが、ガイドレールは、その転動面における全ての点の接線が、その各点から軸心に向かって引いた法線と直交する直線に対して右下向き傾斜角θを有している。このため、前記分力1は軸心に向かって引いた法線に対し直交しない。このため、ローラ・ガイドレール間に作用する力P3は、回転体の回転モーメントには寄与しない。
従って、前記第1状態において回転体に付与される軸心周りの回転モーメントM01は、
M01=(R1の作動力による回転モーメント)+(R2の作動力による回転モーメント)
で算出される。つまり、作動機の回転半径SRは、表2より19mであるから、回転モーメントM01は、式7で算出される。
M01=(P3×SR)+(P3×SR)
=((2.83×105)×19)+((2.83×105)×19)=10.7×106(N・m) (式7)。
M01=(R1の作動力による回転モーメント)+(R2の作動力による回転モーメント)
で算出される。つまり、作動機の回転半径SRは、表2より19mであるから、回転モーメントM01は、式7で算出される。
M01=(P3×SR)+(P3×SR)
=((2.83×105)×19)+((2.83×105)×19)=10.7×106(N・m) (式7)。
一方、第2状態において回転体に付与される軸心周りの回転モーメントM02は、
M02=(R1.5の作動力による回転モーメント)
で算出されるため、回転モーメントM02は、式8で算出される。
M02=(P3×SR)
=((2.83×105)×19)=5.37×106(N・m) (式8)。
M02=(R1.5の作動力による回転モーメント)
で算出されるため、回転モーメントM02は、式8で算出される。
M02=(P3×SR)
=((2.83×105)×19)=5.37×106(N・m) (式8)。
従って、回転体の回転モーメントM0’は、第1状態の回転モーメントと第2状態の回転モーメントとの平均とするため、式9で算出される。
M0’=(M01+M02)/2
=(10.7×106 + 5.37×106)/2=8.05×106(N・m) (式9)。
M0’=(M01+M02)/2
=(10.7×106 + 5.37×106)/2=8.05×106(N・m) (式9)。
ここで、真空効率Vaを0.9、機械効率Maを0.9と仮定すれば、回転体の正味の回転モーメントM0は、式10で算出される。
M0=M0’×Va×Ma=(8.05×106)×0.9×0.9=6.52×106(N・m) (式10)。
M0=M0’×Va×Ma=(8.05×106)×0.9×0.9=6.52×106(N・m) (式10)。
4.回転体の回転抵抗
出力軸における回転体の回転抵抗モーメントMdを求める。
出力軸における回転体の回転抵抗モーメントMdを求める。
本装置の総重量は、表2より5046(t)=5.046×105(N)、出力軸の半径は、1(m)であるから、出力軸の抵抗係数を0.007と仮定して、回転抵抗モーメントMdは、式11で算出される。
Md=総重量×出力軸半径×抵抗係数
=(5.046×105)×1×0.007=3.53×105(N・m) (式11)。
Md=総重量×出力軸半径×抵抗係数
=(5.046×105)×1×0.007=3.53×105(N・m) (式11)。
5.装置の重量バランス
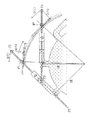
本装置は、回転体の外周面から突出する8基の作動機の内、回転体の上部に位置する2基の作動機はピストンが上端点に位置していないため、そのシリンダ内の液体重量が、他のシリンダ内の液体重量とは異なる。このため、その液体重量が相違することに起因する回転モーメントが回転体に作用する。ここでは、前記第1状態における重量バランスによって発生する軸心周りの回転モーメントと、第2状態における重量バランスによって発生する軸心周りの回転モーメントと、をそれぞれ算出し、それらの平均を、重量バランスによる軸心周りの回転モーメントとする。
本装置は、回転体の外周面から突出する8基の作動機の内、回転体の上部に位置する2基の作動機はピストンが上端点に位置していないため、そのシリンダ内の液体重量が、他のシリンダ内の液体重量とは異なる。このため、その液体重量が相違することに起因する回転モーメントが回転体に作用する。ここでは、前記第1状態における重量バランスによって発生する軸心周りの回転モーメントと、第2状態における重量バランスによって発生する軸心周りの回転モーメントと、をそれぞれ算出し、それらの平均を、重量バランスによる軸心周りの回転モーメントとする。
先ず、図9を参照しながら、前記第1状態における重量バランスを演算する。図9におけるa,b,c,d,e,f,g,hの各符号は、それぞれ軸心から各作動機内の液体の重心位置までの水平方向の距離を示す。各作動機内の液体の重量による軸心周りのモーメントを表3にまとめて示す。
ここで、軸心よりも左側に位置する作動機(R1,R8,R7,R6)内の液体重量は、回転体の回転方向に対して負の方向の回転モーメントとなり、軸心よりも右側に位置する作動機(R2,R3,R4,R5)内の液体重量は、回転体の回転方向に対して正の方向の回転モーメントとなる。従って、第1状態において、回転体に付与される回転モーメントMd1 1は、式12で算出される。
Md1 1=(−)Md1 1(L)+ Md1 1(R)
=(-)1.61×107 + 1.55×107=(-)5.43×105(N・m) (式12)。
Md1 1=(−)Md1 1(L)+ Md1 1(R)
=(-)1.61×107 + 1.55×107=(-)5.43×105(N・m) (式12)。
次に、図10を参照しながら、前記第2状態における重量バランスを演算する。図10におけるa2,b2,c2,d2,e2,f2,g2,h2の各符号は、軸心から各作動機内の液体の重心位置までの水平方向の距離を示す。作動機内の液体の重量による軸心周りのモーメントを表4に示す。
第2状態においても、軸心よりも左側に位置する作動機(R1.5,R8.5,R7.5,R6.5)内の液体重量は、回転体の回転方向に対して負の方向の回転モーメントとなり、軸心よりも右側に位置する作動機(R2.5,R3.5,R4.5,R5.5)内の液体重量は、回転体の回転方向に対して正の方向の回転モーメントとなる。従って、第2状態において回転体に付与される回転モーメントMd1 2は、式13で算出される。
Md1 2=(−)Md1 2(L)+ Md1 2(R)
=(-)1.65×107 + 1.48×107=(-)1.72×106(N・m) (式13)。
Md1 2=(−)Md1 2(L)+ Md1 2(R)
=(-)1.65×107 + 1.48×107=(-)1.72×106(N・m) (式13)。
従って、重量バランスによる軸心周りのモーメントMd1は、第1状態における回転モーメントMd1 1と第2状態におけるMd1 2との平均として、式14によって算出される。
Md1=(Md1 1+Md1 2)/2
=(5.43×105 + 1.72×106)/2=(−)1.13×106(N・m) (式14)。
Md1=(Md1 1+Md1 2)/2
=(5.43×105 + 1.72×106)/2=(−)1.13×106(N・m) (式14)。
6.回転体の有効回転モーメント
以上の演算結果から、回転体の有効回転モーメントMTは、式15で算出される。
MT=M0−(Md+Md1)
=6.52×106 −(0.353×106 + 1.13×106)=5.04×106(N・m) (式15)。
以上の演算結果から、回転体の有効回転モーメントMTは、式15で算出される。
MT=M0−(Md+Md1)
=6.52×106 −(0.353×106 + 1.13×106)=5.04×106(N・m) (式15)。
7.遠心力の確認
本装置は、回転体の直径が約30mと大きいため、作動機内の液体に比較的大きい遠心力が作用する。そこで、回転体の上部に位置する2基の作動機内の液体重量と、その液体に作用する遠心力との関係を確認し、それによって本装置の上限回転数を設定する。ここでは、作動機内の液体の質量は、その重心に集中しているとし、遠心力はその重心位置に作用すると仮定する。図10に示すように、液体の重心と回転体の軸心とを結ぶ線と、鉛直線とのなす角度をαとすると遠心力が液体重量よりも小さくなるには、「遠心力」<「液体重量×cosα」となる必要がある。従って、次式が成り立つ。
(m・r・ω2)<(m・g・cosα)
ここで、mは液体質量、rは液体の重心と回転体の軸心との間の距離、ωは回転体の角速度、gは重力加速度である。
本装置は、回転体の直径が約30mと大きいため、作動機内の液体に比較的大きい遠心力が作用する。そこで、回転体の上部に位置する2基の作動機内の液体重量と、その液体に作用する遠心力との関係を確認し、それによって本装置の上限回転数を設定する。ここでは、作動機内の液体の質量は、その重心に集中しているとし、遠心力はその重心位置に作用すると仮定する。図10に示すように、液体の重心と回転体の軸心とを結ぶ線と、鉛直線とのなす角度をαとすると遠心力が液体重量よりも小さくなるには、「遠心力」<「液体重量×cosα」となる必要がある。従って、次式が成り立つ。
(m・r・ω2)<(m・g・cosα)
ここで、mは液体質量、rは液体の重心と回転体の軸心との間の距離、ωは回転体の角速度、gは重力加速度である。
上式より、回転体の角速度は、式16を満たす必要がある。
ω<(g・cosα/r)1/2 (式16)。
ω<(g・cosα/r)1/2 (式16)。
よって、R1.5では、r=17.58(m),cosα=0.34であるから、式16より、
ω<(9.8×0.34/17.58)1/2=0.434(rad/sec)=4.15 rpm
となる。
ω<(9.8×0.34/17.58)1/2=0.434(rad/sec)=4.15 rpm
となる。
また、R2.5では、r=17.71(m),cosα=0.43であるから、式16より、
ω<(9.8×0.43/17.71)1/2=0.487(rad/sec)=4.65 rpm
となる。
ω<(9.8×0.43/17.71)1/2=0.487(rad/sec)=4.65 rpm
となる。
従って、本装置における回転数の上限は、4rpmとすることが好ましい。
8.装置の出力
以上から、本装置の出力PWを算出する。ここで、出力PW(単位W;ワット)は、式17で算出される。
PW=MT×2π×回転数(rpm)/60 (式17)。
以上から、本装置の出力PWを算出する。ここで、出力PW(単位W;ワット)は、式17で算出される。
PW=MT×2π×回転数(rpm)/60 (式17)。
従って、回転数1.5rpmでの出力PW1.5は、式17より、
PW1.5=5.04×106×2π×1.5/60=791(kW)。
PW1.5=5.04×106×2π×1.5/60=791(kW)。
同様にして、回転数2rpmでの出力PW2,回転数3rpmでの出力PW3,回転数4rpmでの出力PW4はそれぞれ、次のように算出される。
PW2=5.04×106×2π×2/60=1055(kW)
PW3=5.04×106×2π×3/60=1583(kW)
PW4=5.04×106×2π×4/60=2110(kW)。
PW2=5.04×106×2π×2/60=1055(kW)
PW3=5.04×106×2π×3/60=1583(kW)
PW4=5.04×106×2π×4/60=2110(kW)。
9.補足
本装置においては、ローラがガイドレール上で転動している間に、作動機のピストンが下端点に移動し、そのローラがガイドレールから離れた後に、前記ピストンが液体及びピストン・ピストンロッド・ローラの重量によって上端点に復帰する。ここでは、このピストンの復帰について確認する。
本装置においては、ローラがガイドレール上で転動している間に、作動機のピストンが下端点に移動し、そのローラがガイドレールから離れた後に、前記ピストンが液体及びピストン・ピストンロッド・ローラの重量によって上端点に復帰する。ここでは、このピストンの復帰について確認する。
ピストンが押し戻されるためには、ローラがガイドレールから離れた後のR3位置では、シリンダ軸線は下向きであるため、大気圧によってピストンをシリンダに押し込む力と、液体重量及びピストン・ピストンロッド・ローラの合計重量によってピストンを押し戻す力との大小を比較すればよい。
ピストン・ピストンロッド・ローラの合計重量は、表2により15(t)=1.5×105(N)である。また、図7において、R3でのシリンダ軸線は、鉛直下向きに対して45°の角度を有しているため、ピストン・ピストンロッド・ローラ合計重量のシリンダ軸線方向の分力F1は、式18で算出される。
F1=(1.5×105) × sin(45°)=1.06×105(N) (式18)。
F1=(1.5×105) × sin(45°)=1.06×105(N) (式18)。
また、液面からR3ピストンまでの高さHが、10.5m(図7及び表2参照)であり、ピストンの断面積が3.14m2であることから、液体(水)重量によるピストンを押し戻す力F2は、式19で算出される。
F2=3.14(m2)×10.5(m)×1000(kg/m3)×10(m/sec2)
=3.30×105(N) (式19)。
F2=3.14(m2)×10.5(m)×1000(kg/m3)×10(m/sec2)
=3.30×105(N) (式19)。
一方、大気圧によるピストンの押し込み力F3は、式20で算出される。
F3=3.14(m2)×1.0×105(Pa)=3.14×105(N) (式20)。
F3=3.14(m2)×1.0×105(Pa)=3.14×105(N) (式20)。
式18〜20から、F1+F2>F3が成り立つ。このため、ローラがガイドレールから離れた後のR3位置においては、前記ピストンは、液体及びピストン・ピストンロッド・ローラの合計重量によってシリンダの上端点まで押し戻される。
以上説明したように、本考案は、真空圧と大気圧との差圧を回転体の回転力に変換することができ、エネルギー源は、クリーンかつ無制限で、さらに安定供給であるため、発電機等を駆動するための動力発生装置として有用である。
1 回転体
10 ピストンロッド
11 ローラ
13 ロック機構
2 出力軸
21,22 作動レバー
23 ロック作動手段
24 ロック解除手段
29 液体
3 作動機
35 エア抜き管
37 給液管
4 架台
41 ガイドレール
7 シリンダ
7a 基部
7b 作動部
9 ピストン
10 ピストンロッド
11 ローラ
13 ロック機構
2 出力軸
21,22 作動レバー
23 ロック作動手段
24 ロック解除手段
29 液体
3 作動機
35 エア抜き管
37 給液管
4 架台
41 ガイドレール
7 シリンダ
7a 基部
7b 作動部
9 ピストン
Claims (7)
- 真空圧と大気圧との差圧によって動力を発生させる装置であって、
架台と、
前記架台に対し軸支されて水平軸回りの一方向に回転する、内部に液体が封入された回転体と、
前記回転体の外周に等間隔を空けて設けられた2以上の作動機と、
前記回転体の上方位置を開始端として、そこから該回転体の回転方向下方の終了端まで傾斜して設けられたガイドレールと、を備え、
前記各作動機は、
前記回転体の外周に設けられて該回転体内に連通するシリンダと、
前記シリンダに内挿されて、上端点と下端点との間をシリンダ軸線方向に往復動するピストンと、
前記ピストンに連結されたピストンロッドと、
前記ピストンロッドの先端部に取り付けられて、前記ガイドレール上を転動するローラと、
前記作動機を、前記ピストンが上端点で固定されてその往復動を規制した固定状態と、その往復動を許容した可動状態と、に切り替えるロック機構と、を有し、
前記回転体の上部に位置する少なくとも1の作動機のシリンダ内に液面が形成されるように前記回転体及び各シリンダの内部に前記液体を封入すると共に、前記シリンダ内における前記液面よりも上方を真空にした状態を初期状態とし、
前記シリンダ内に真空が形成された作動機を、前記ロック機構によって可動状態に切り替えて、前記シリンダの上端点に位置するピストンを真空圧と大気圧との差圧によってシリンダ内に引き込む第1ステップと、
前記可動状態に切り替えられた作動機のローラを、前記ガイドレールの開始端近傍に係合させる第2ステップと、
前記ローラがガイドレールに係合することによって、当該作動機のシリンダがピストンに対し相対的に移動して、前記回転体に回転力が付与される第3ステップと、
前記シリンダの相対移動が継続し、それによって回転体が回転するに伴い、前記ローラが前記ガイドレール上を転動する第4ステップと、
前記ローラが前記ガイドレールの終了端に到達すると共に、前記ピストンがシリンダの下端点に位置し、さらに前記シリンダが前記液面よりも下方に位置することによって、そのシリンダ内の真空が消滅する第5ステップと、
前記ローラが前記ガイドレールの終了端から離れた後に、前記ピストンが液体及びピストン・ピストンロッド・ローラの重量によって当該シリンダの上端点まで移動する第6ステップと、
前記上端点までピストンが移動した作動機を、前記ロック機構によって固定状態に切り替える第7ステップと、
前記固定状態に切り替えられた作動機が、前記回転体の回転に伴い前記液面よりも上方に移動して、そのシリンダ内に再び真空が形成される第8ステップと、
の各ステップを前記複数の作動機が順に繰り返すことによって、前記回転体を回転させる動力発生装置。 - 請求項1に記載の動力発生装置において、
前記各作動機のシリンダは、前記回転体の外周面から放射方向に突出する基部と、該基部の外端部において折曲されて前記回転体の回転方向に延びる作動部と、を含み、
前記ピストンは、前記作動部内を往復動する動力発生装置。 - 請求項1に記載の動力発生装置において、
前記各作動機のシリンダは、前記回転体の外周面から放射方向に、直線状に突出する動力発生装置。 - 請求項1〜3のいずれかに記載の動力発生装置において、
少なくとも1の作動機のシリンダに連通するエア抜き管と、前記回転体の外周面の、前記エア抜き管に近接する位置に設けた給液管と、をさらに備え、
前記給液管の開口端は、それを前記回転体の頂部に位置させたときに前記エア抜き管の開口端よりも上位に位置する動力発生装置。 - 請求項1〜4のいずれか1項に記載の動力発生装置において、
前記ロック機構は、作動レバーを有し、
前記回転体の上部近傍位置に設けられて、前記作動機が固定状態から可動状態に切り替わるように前記作動レバーを操作するロック解除手段と、
前記回転体の下部近傍位置に設けられて、前記作動機が可動状態から固定状態に切り替わるように前記作動レバーを操作するロック作動手段と、をさらに備える動力発生装置。 - 請求項1〜5のいずれか1項に記載の動力発生装置において、
前記回転体に初動回転力を付与する始動装置をさらに備える動力発生装置。 - 請求項1〜6のいずれか1項に記載の動力発生装置において、
前記回転体の回転速度を一定速度にする定速装置をさらに備える動力発生装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003273403U JP3105668U (ja) | 2003-08-22 | 2003-12-25 | 動力発生装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003208396 | 2003-08-22 | ||
| JP2003208595 | 2003-08-25 | ||
| JP2003273403U JP3105668U (ja) | 2003-08-22 | 2003-12-25 | 動力発生装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP3105668U true JP3105668U (ja) | 2004-11-25 |
Family
ID=34197129
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003273403U Expired - Fee Related JP3105668U (ja) | 2003-08-22 | 2003-12-25 | 動力発生装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20050039449A1 (ja) |
| JP (1) | JP3105668U (ja) |
| AU (1) | AU2003292732A1 (ja) |
| WO (1) | WO2005019644A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| MD20100018A2 (ro) * | 2010-02-10 | 2011-08-31 | Константин ЧИХАН | Instalaţie energetică gravitaţională |
| JP2015117686A (ja) * | 2013-12-16 | 2015-06-25 | 雄一 大宅 | 偏心回転式発電装置(2) |
| WO2022131694A1 (ko) * | 2020-12-16 | 2022-06-23 | 주식회사 무한클린에너지 | 중량체 및 유체 이동에 의한 동력발생장치 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120167562A1 (en) * | 2009-08-27 | 2012-07-05 | Peter John Carter | Displacement drive |
| US20130333382A1 (en) * | 2010-12-08 | 2013-12-19 | HeungTung Li | Power Source Machinery |
| CN102022294A (zh) * | 2010-12-09 | 2011-04-20 | 马成贵 | 旋转热管发电方法及装置 |
| EA201391435A1 (ru) * | 2011-05-05 | 2014-04-30 | Никола Массимо Массимо | Устройство для перемещения несжимаемой текучей среды и поворотное устройство с сервоприводом |
| FI123408B (fi) * | 2011-09-28 | 2013-03-28 | Juhani Korhonen | Nesteen sisässä käytettäväksi tarkoitettu laite ja menetelmä liikkeen aikaansaamiseksi |
| PL397399A1 (pl) * | 2011-12-14 | 2013-06-24 | Stanislaw Wisniewski | Naped grawitacyjny |
| CN103807091A (zh) * | 2012-11-06 | 2014-05-21 | 方锦山 | 地球引力与浮力发电装置 |
| CA2945576A1 (en) * | 2014-03-06 | 2015-09-11 | Chun-I Tai | Buoyancy-driven kinetic energy generating apparatus and method for generating kinetic energy by using same backgroung of the invention |
| ES2635613B2 (es) * | 2016-10-28 | 2018-01-19 | Zacarias CALVO MERIDA | Motor gravitatorio |
| US10989165B1 (en) | 2017-08-08 | 2021-04-27 | Ray Chaney | System and method for obtaining a high torque output from bouyant elements traveling through a liquid medium |
| WO2019081785A1 (es) * | 2017-10-28 | 2019-05-02 | Calvo Merida Zacarias | Motor gravitatorio |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3412482A (en) * | 1966-01-19 | 1968-11-26 | Kasimir C. Kusmer | Buoyancy demonstrating apparatus |
| US3625089A (en) * | 1970-04-30 | 1971-12-07 | Edward Rutkove | Gravity wheel apparatus |
| US3934964A (en) * | 1974-08-15 | 1976-01-27 | David Diamond | Gravity-actuated fluid displacement power generator |
| US4385497A (en) * | 1981-08-03 | 1983-05-31 | Scott Dan J | Propulsion system for water wheel |
| JPH08159007A (ja) * | 1994-12-06 | 1996-06-18 | Nippon Pipe Conveyor Kenkyusho:Kk | トリチェリーの真空を利用した動力発生装置及び真空発生装置 |
| US5996344A (en) * | 1998-10-29 | 1999-12-07 | Frenette; Eugene Roland | Buoyancy device for providing rotational torque to a shaft |
| US6764275B1 (en) * | 2002-06-28 | 2004-07-20 | Dennis L. Carr | Fluid displacement rotational assembly |
-
2003
- 2003-12-25 JP JP2003273403U patent/JP3105668U/ja not_active Expired - Fee Related
- 2003-12-26 AU AU2003292732A patent/AU2003292732A1/en not_active Abandoned
- 2003-12-26 WO PCT/JP2003/017085 patent/WO2005019644A1/ja not_active Ceased
-
2004
- 2004-02-10 US US10/774,465 patent/US20050039449A1/en not_active Abandoned
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| MD20100018A2 (ro) * | 2010-02-10 | 2011-08-31 | Константин ЧИХАН | Instalaţie energetică gravitaţională |
| JP2015117686A (ja) * | 2013-12-16 | 2015-06-25 | 雄一 大宅 | 偏心回転式発電装置(2) |
| WO2022131694A1 (ko) * | 2020-12-16 | 2022-06-23 | 주식회사 무한클린에너지 | 중량체 및 유체 이동에 의한 동력발생장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050039449A1 (en) | 2005-02-24 |
| AU2003292732A1 (en) | 2005-03-10 |
| WO2005019644A1 (ja) | 2005-03-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3105668U (ja) | 動力発生装置 | |
| NO334824B1 (no) | Styreelement som virker med hovedsakelig konstant kraft, og brønnborings-sentreringsanordning, -forankring og -traktorenhet omfattende et slikt styreelement. | |
| SI20651A (sl) | Vzgonski motor | |
| CN105256801B (zh) | 一种堤坝溃口快速射桩机及射桩方法 | |
| KR101415752B1 (ko) | 수중 작업 어셈블리 및 이를 고정하는 방법 | |
| JP2014533814A (ja) | エネルギー発生機 | |
| US5961296A (en) | Vacuum-generating apparatus by applying torricelli's vacuum | |
| CN207163673U (zh) | 一种可快速查找漏点的液力变矩器检漏机 | |
| JP2005098276A (ja) | 動力発生装置 | |
| US20140070543A1 (en) | Mechanism for shifting incompressible fluid and servo assisted rotating mechanism | |
| CN206825369U (zh) | 能扩大适用范围的汽轮机缸体处部件加工用设备 | |
| CN103277239A (zh) | 一种海浪能发电机设备 | |
| JP3016870U (ja) | トリチェリーの真空を利用した動力発生装置及び真空発生装置 | |
| CN105604060B (zh) | 一种堤坝溃口射桩机及其射桩方法 | |
| CN100585175C (zh) | 浮力动力机 | |
| JP4011365B2 (ja) | 回転駆動装置 | |
| CN105350536B (zh) | 一种堤坝溃口射桩机 | |
| TW201915320A (zh) | 浮力發電結構 | |
| JPH0485483A (ja) | 高耐熱パッカー装置 | |
| WO2006071916A1 (en) | A system for obtaining rotational energy from ambient forces | |
| RU52928U1 (ru) | Устройство для передачи вращения | |
| JP3020663U (ja) | 地盤改良機の回転ロッド駆動装置 | |
| JP3338998B2 (ja) | 回転チュービング装置 | |
| JP6616871B2 (ja) | ハンマーを用いる動力発生装置 | |
| JPH0719157A (ja) | 重力移動を利用する動力発生装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |