JP2022011402A - ロボットの制御方法およびロボットシステム - Google Patents
ロボットの制御方法およびロボットシステム Download PDFInfo
- Publication number
- JP2022011402A JP2022011402A JP2020112527A JP2020112527A JP2022011402A JP 2022011402 A JP2022011402 A JP 2022011402A JP 2020112527 A JP2020112527 A JP 2020112527A JP 2020112527 A JP2020112527 A JP 2020112527A JP 2022011402 A JP2022011402 A JP 2022011402A
- Authority
- JP
- Japan
- Prior art keywords
- work
- robot
- robot arm
- force
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 35
- 230000001186 cumulative effect Effects 0.000 abstract description 9
- 238000001514 detection method Methods 0.000 description 35
- 239000012636 effector Substances 0.000 description 26
- 239000013256 coordination polymer Substances 0.000 description 22
- 238000010586 diagram Methods 0.000 description 16
- 238000012937 correction Methods 0.000 description 12
- 238000006243 chemical reaction Methods 0.000 description 11
- 238000005498 polishing Methods 0.000 description 10
- 238000012986 modification Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 230000007423 decrease Effects 0.000 description 5
- 230000036544 posture Effects 0.000 description 5
- 230000005484 gravity Effects 0.000 description 4
- 230000010354 integration Effects 0.000 description 4
- 238000013528 artificial neural network Methods 0.000 description 3
- 230000000306 recurrent effect Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000010801 machine learning Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 239000006061 abrasive grain Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/163—Programme controls characterised by the control loop learning, adaptive, model based, rule based expert control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1661—Programme controls characterised by programming, planning systems for manipulators characterised by task planning, object-oriented languages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39322—Force and position control
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
Abstract

【解決手段】所定の位置指令値に基づいて力制御によりロボットアームを動作させて第1作業対象物に対して第1作業を実行する第1作業ステップと、ロボットアームに設定された制御点が、第1作業ステップにおいて通過した軌道の第1位置情報を記憶する第1記憶ステップと、第1記憶ステップにおいて記憶した第1位置情報に基づいてロボットアームに対する位置指令値を更新し、更新した位置指令値である更新値に基づいて力制御によりロボットアームを動作させて第2作業対象物に対して第2作業を実行する第2作業ステップと、を有することを特徴とするロボットの制御方法。
【選択図】図11
Description
所定の位置指令値に基づいて力制御により前記ロボットアームを動作させて前記第1作業対象物に対して前記第1作業を実行する第1作業ステップと、
前記ロボットアームに設定された制御点が、前記第1作業ステップにおいて通過した軌道の第1位置情報を記憶する第1記憶ステップと、
前記第1記憶ステップにおいて記憶した前記第1位置情報に基づいて前記ロボットアームに対する位置指令値を更新し、更新した前記位置指令値である更新値に基づいて力制御により前記ロボットアームを動作させて前記第2作業対象物に対して前記第2作業を実行する第2作業ステップと、を有することを特徴とする。
記憶部を有し、前記ロボットアームの作動を制御する制御部と、を備え、
前記制御部は、
所定の位置指令値に基づいて力制御により前記ロボットアームを動作させて前記第1作業対象物に対して前記第1作業を実行し、
前記ロボットアームに設定された制御点が、前記第1作業において通過した軌道の第1位置情報を記憶し、
記憶した前記第1位置情報に基づいて前記ロボットアームに対する位置指令値を更新し、
更新した前記位置指令値である更新値に基づいて力制御により前記ロボットアームを動作させて前記第2作業対象物に対して前記第2作業を実行することを特徴とする。
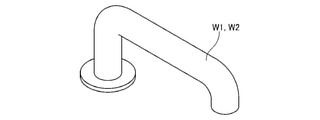
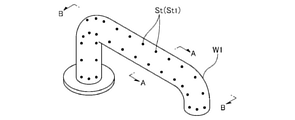
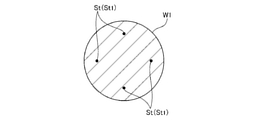
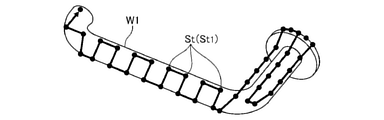
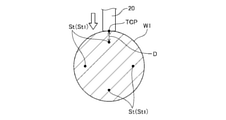
図1は、第1実施形態のロボットシステムの全体構成を示す図である。図2は、図1に示すロボットシステムのブロック図である。図3は、図1に示すロボットの作業対象物であるワークの斜視図である。図4は、図3に示すワークに目標位置を設定した状態を示す斜視図である。図5は、図4中のA-A線断面図である。図6は、図4中のB-B線断面図である。図7は、図3に示すワークの斜視図であって、各目標位置を制御点が通過する順番を矢印で示した図である。図8は、図4中のA-A線断面図であって、作業を行っている状態を示す図である。図9は、ワークの横断面図であって、2回目の作業を行う際の目標位置を設定した状態を示す図である。図10は、図2に示す制御装置が行う制御動作を説明するためのフローチャートであって、1回目の作業を行う際のフローチャートである。図11は、図2に示す制御装置が行う制御動作を説明するためのフローチャートであって、2回目の作業を行う際のフローチャートである。
図1に示すロボット1は、本実施形態では単腕の6軸垂直多関節ロボットであり、基台11と、ロボットアーム10と、を有する。また、ロボットアーム10の先端部にエンドエフェクター20を装着することができる。エンドエフェクター20は、ロボット1の構成要件であってもよく、ロボット1の構成要件でなくてもよい。
制御部としての制御装置3は、ロボット1から離間して配置されており、プロセッサーの1例であるCPU(Central Processing Unit)が内蔵されたコンピューター等で構成することができる。この制御装置3は、ロボット1の基台11に内蔵されていてもよい。
まず、ステップS201において、1回目の作業時のデータを読み出し、目標位置を設定する。すなわち、第1作業においてステップS104で記憶した第1位置情報を読み出し、目標位置St2として設定する。さらに換言すれば、第1作業時にツールセンターポイントTCPが移動した位置を目標位置St2に設定する。
ステップS105としては、以下のような2つのパターンがある。
図12は、第2実施形態のロボットシステムの制御装置が生成する学習モデルの概念図である。
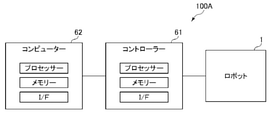
図13は、ロボットシステムについてハードウェアを中心として説明するためのブロック図である。
図14は、ロボットシステムのハードウェアを中心とした変形例1を示すブロック図である。
従って、コンピューター63を「制御装置」として捉えることができる。
図15は、ロボットシステムのハードウェアを中心とした変形例2を示すブロック図である。
Claims (7)
- 第1作業対象物に対して第1作業を行い、前記第1作業対象物と同種の第2作業対象物に対して前記第1作業と同種の第2作業を行うロボットアームを有するロボットの制御方法であって、
所定の位置指令値に基づいて力制御により前記ロボットアームを動作させて前記第1作業対象物に対して前記第1作業を実行する第1作業ステップと、
前記ロボットアームに設定された制御点が、前記第1作業ステップにおいて通過した軌道の第1位置情報を記憶する第1記憶ステップと、
前記第1記憶ステップにおいて記憶した前記第1位置情報に基づいて前記ロボットアームに対する位置指令値を更新し、更新した前記位置指令値である更新値に基づいて力制御により前記ロボットアームを動作させて前記第2作業対象物に対して前記第2作業を実行する第2作業ステップと、を有することを特徴とするロボットの制御方法。 - 前記第2作業ステップでは、前記ロボットアームに加わる力が所定値を超えた場合、前記制御点の移動速度を低下させて前記ロボットアームを動作させる請求項1に記載のロボットの制御方法。
- 前記第2作業ステップでは、前記ロボットアームに加わる力が所定値を超えた場合、前記ロボットアームの動作を停止する請求項2に記載のロボットの制御方法。
- 前記第2作業ステップにおいて前記制御点が通過した軌道の第2位置情報を記憶する第2記憶ステップと、
前記第1位置情報および前記第2位置情報の平均値に基づいて前記ロボットアームに対する位置指令値を更新し、前記平均値に基づいて更新した前記位置指令値である更新値に基づいて前記ロボットアームを動作させて第3作業を行う第3作業ステップと、を有する請求項1ないし3のいずれか1項に記載のロボットの制御方法。 - 前記第1作業と前記第2作業とは、連続して行われる作業である請求項1ないし4のいずれか1項に記載のロボットの制御方法。
- 第1作業対象物に対して第1作業を行い、前記第1作業対象物と同種の第2作業対象物に対して前記第1作業と同種の第2作業を行うロボットアームと、
記憶部を有し、前記ロボットアームの作動を制御する制御部と、を備え、
前記制御部は、
所定の位置指令値に基づいて力制御により前記ロボットアームを動作させて前記第1作業対象物に対して前記第1作業を実行し、
前記ロボットアームに設定された制御点が、前記第1作業において通過した軌道の第1位置情報を記憶し、
記憶した前記第1位置情報に基づいて前記ロボットアームに対する位置指令値を更新し、
更新した前記位置指令値である更新値に基づいて力制御により前記ロボットアームを動作させて前記第2作業対象物に対して前記第2作業を実行することを特徴とするロボットシステム。 - 前記制御部は、前記ロボットアームに対する前記位置指令値と、前記ロボットアームに加わる力を入力とし、前記更新値を出力とする学習モデルを生成する請求項6に記載のロボットシステム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020112527A JP2022011402A (ja) | 2020-06-30 | 2020-06-30 | ロボットの制御方法およびロボットシステム |
| CN202110722227.7A CN113858189B (zh) | 2020-06-30 | 2021-06-28 | 机器人的控制方法及机器人系统 |
| US17/361,425 US11951625B2 (en) | 2020-06-30 | 2021-06-29 | Control method for robot and robot system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020112527A JP2022011402A (ja) | 2020-06-30 | 2020-06-30 | ロボットの制御方法およびロボットシステム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2022011402A true JP2022011402A (ja) | 2022-01-17 |
Family
ID=78990001
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020112527A Pending JP2022011402A (ja) | 2020-06-30 | 2020-06-30 | ロボットの制御方法およびロボットシステム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11951625B2 (ja) |
| JP (1) | JP2022011402A (ja) |
| CN (1) | CN113858189B (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021049597A (ja) * | 2019-09-24 | 2021-04-01 | ソニー株式会社 | 情報処理装置、情報処理システム及び情報処理方法 |
| US20230075185A1 (en) * | 2021-09-09 | 2023-03-09 | Ford Global Technologies, Llc | Method and system for positioning a moveable robotic system |
| US20230191598A1 (en) * | 2021-12-22 | 2023-06-22 | Ati Industrial Automation, Inc. | Contact Force Overshoot Mitigation in Pneumatic Force Control Devices |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0631663A (ja) | 1992-07-17 | 1994-02-08 | Fujitsu Ltd | 倣い制御ロボットの軌道制御装置 |
| JPH06170763A (ja) | 1992-12-04 | 1994-06-21 | Fanuc Ltd | 力制御を用いた研磨方法 |
| US7117068B2 (en) * | 2003-09-29 | 2006-10-03 | Quantum Corporation | System and method for library robotics positional accuracy using parallax viewing |
| CN100561491C (zh) * | 2005-02-25 | 2009-11-18 | Abb研究有限公司 | 自动路径学习的方法和设备 |
| JP5765615B2 (ja) | 2011-02-28 | 2015-08-19 | 株式会社Ihi | 加工ロボットの軌道追従装置と方法 |
| JP2015000455A (ja) * | 2013-06-17 | 2015-01-05 | キヤノン株式会社 | ロボット装置及びロボット装置の制御方法 |
| CA2928645C (en) * | 2013-10-25 | 2021-10-26 | Aleksandar VAKANSKI | Image-based robot trajectory planning approach |
| JP5927259B2 (ja) * | 2014-09-30 | 2016-06-01 | ファナック株式会社 | 力制御を実行するロボットシステム |
| JP6034900B2 (ja) * | 2015-03-06 | 2016-11-30 | ファナック株式会社 | 動作プログラムの再開を判断するロボット制御装置 |
| JP6567998B2 (ja) * | 2016-03-23 | 2019-08-28 | 国立大学法人 東京大学 | 制御方法 |
| CN109483556B (zh) * | 2018-10-30 | 2021-04-16 | 武汉大学 | 一种基于示教学习的机器人打磨系统及方法 |
| US10946519B1 (en) * | 2018-11-30 | 2021-03-16 | X Development Llc | Offline computation and caching of precalculated joint trajectories |
-
2020
- 2020-06-30 JP JP2020112527A patent/JP2022011402A/ja active Pending
-
2021
- 2021-06-28 CN CN202110722227.7A patent/CN113858189B/zh active Active
- 2021-06-29 US US17/361,425 patent/US11951625B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20210402596A1 (en) | 2021-12-30 |
| CN113858189B (zh) | 2024-01-09 |
| CN113858189A (zh) | 2021-12-31 |
| US11951625B2 (en) | 2024-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108422420B (zh) | 具有学习控制功能的机器人系统以及学习控制方法 | |
| JP2022011402A (ja) | ロボットの制御方法およびロボットシステム | |
| US11691290B2 (en) | Robot control method and robot system | |
| JP6697544B2 (ja) | 最適化装置及びそれを備えた垂直型多関節ロボット | |
| US11660742B2 (en) | Teaching method and robot system | |
| JP2021146435A (ja) | ロボットシステム、ロボットシステムで実行される方法および教示データを生成する方法 | |
| JP7423943B2 (ja) | 制御方法およびロボットシステム | |
| JP7566810B2 (ja) | ロボットシステム、プランニングシステム、ロボット制御方法、およびプランニングプログラム | |
| EP4067012A1 (en) | Method for controlling robot, robot system, and program for controlling robot | |
| JP7528709B2 (ja) | 力制御パラメーター調整方法 | |
| JP7548036B2 (ja) | 動作パラメーター調整方法、動作パラメーター調整プログラムおよびロボットシステム | |
| CN114179077B (zh) | 力控制参数调整方法、机器人系统及存储介质 | |
| JP6668629B2 (ja) | ロボット制御装置およびロボットシステム | |
| WO2021095833A1 (ja) | マスタスレーブシステム及び制御方法 | |
| CN113442131B (zh) | 示教方法 | |
| US20220314450A1 (en) | Method For Controlling Robot, Robot System, And Storage Medium | |
| CN114179076B (zh) | 作业时间提示方法、力控制参数设定方法、机器人系统以及存储介质 | |
| US20220134565A1 (en) | Control Method For Robot | |
| US20220314451A1 (en) | Method For Controlling Robot, Robot System, And Storage Medium | |
| JP2023039052A (ja) | 動作パラメーター調整方法 | |
| JP2020157459A (ja) | 制御方法およびロボットシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210913 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20211104 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230607 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240402 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240820 |