JP2022010513A - 放射線画像撮影装置及び放射線画像撮影システム - Google Patents
放射線画像撮影装置及び放射線画像撮影システム Download PDFInfo
- Publication number
- JP2022010513A JP2022010513A JP2020111147A JP2020111147A JP2022010513A JP 2022010513 A JP2022010513 A JP 2022010513A JP 2020111147 A JP2020111147 A JP 2020111147A JP 2020111147 A JP2020111147 A JP 2020111147A JP 2022010513 A JP2022010513 A JP 2022010513A
- Authority
- JP
- Japan
- Prior art keywords
- housing
- radiation
- positioning
- imaging apparatus
- atmospheric pressure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005855 radiation Effects 0.000 title claims abstract description 167
- 238000003384 imaging method Methods 0.000 title claims abstract description 132
- 238000001514 detection method Methods 0.000 claims abstract description 64
- 238000002360 preparation method Methods 0.000 claims description 27
- 238000005259 measurement Methods 0.000 claims description 15
- 206010073306 Exposure to radiation Diseases 0.000 claims description 2
- 238000000034 method Methods 0.000 description 40
- 230000008569 process Effects 0.000 description 29
- 230000001133 acceleration Effects 0.000 description 12
- 238000004891 communication Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 7
- 238000012986 modification Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 238000007789 sealing Methods 0.000 description 6
- 230000000875 corresponding effect Effects 0.000 description 5
- 238000003860 storage Methods 0.000 description 5
- 239000000758 substrate Substances 0.000 description 5
- 230000007704 transition Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 229910001416 lithium ion Inorganic materials 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 238000009530 blood pressure measurement Methods 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000011895 specific detection Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images













Landscapes
- Measurement Of Radiation (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Abstract
【課題】被験者のポジショニングが完了したか否かの判定を適切に行う。【解決手段】放射線画像撮影装置20は、二次元状に配置された複数の放射線検出素子34を備えるセンサーパネルSPと、センサーパネルSPを収納する筐体1と、を備え、制御部6は、筐体1の変形を検出し、検出された筐体1の変形量から被験者のポジショニングが完了したか否かを判定する。【選択図】図7
Description
本発明は、放射線画像撮影装置及び放射線画像撮影システムに関する。
放射線画像撮影装置としてFPD(Flat Panel Detector)を用いたものが知られており、従来は支持台と一体的に形成された、いわゆる専用機型として構成されていたが、近年、放射線検出素子等を筐体内に収納し、持ち運び可能とした可搬型(カセッテ型等ともいう。)の放射線画像撮影装置が開発され、実用化されている。
そして、可搬型の放射線画像撮影装置ではバッテリーが内蔵されている場合が少なくない。その場合、バッテリーの電力が無駄に消費されてしまうと、1回の充電で行うことができる撮影の回数が少なくなる。そのため、放射線画像撮影装置を頻繁に充電することが必要になり、撮影の作業効率が低下するとともに、ユーザーである放射線技師等は撮影の合間に頻繁に充電しなければならなくなるため放射線画像撮影装置の使い勝手が悪いと感じてしまう。そこで、電力を無駄に消費しないようにするために、例えば、撮影開始時は省電力モードに設定しておき、被験者のポジショニングが完了したことが検出された場合、放射線画像撮影装置の電力状態を現在の電力状態(省電力モード)よりも大きい照射検出撮影モードへ移行させる放射線画像撮影装置が知られている(例えば、特許文献1参照)。
しかしながら、上記特許文献1に記載されている放射線画像撮影装置では、自装置の振動が所定の範囲に収まった場合に被験者のポジショニングが完了したと判断するため、例えば、自装置を動かしたときに強い衝撃が与えられ、その後、当該衝撃による振動が所定の範囲に収まった場合に、被験者のポジショニングが完了したと誤った判断をしてしまうという問題がある。
本発明は、上記課題に鑑みてなされたもので、被験者のポジショニングが完了したか否かの判定を適切に行うことを目的とする。
上記課題を解決するため、請求項1に記載の発明の放射線画像撮影装置は、
二次元状に配置された複数の放射線検出素子を備えるセンサーパネルと、
前記センサーパネルを収納する筐体と、
前記筐体の変形を検出する筐体変形検出手段と、
前記筐体変形検出手段によって検出された前記筐体の変形量から被験者のポジショニング又は撮影準備が完了したか否かを判定する判定手段と、
を備えることを特徴とする。
二次元状に配置された複数の放射線検出素子を備えるセンサーパネルと、
前記センサーパネルを収納する筐体と、
前記筐体の変形を検出する筐体変形検出手段と、
前記筐体変形検出手段によって検出された前記筐体の変形量から被験者のポジショニング又は撮影準備が完了したか否かを判定する判定手段と、
を備えることを特徴とする。
請求項2に記載の発明は、請求項1に記載の放射線画像撮影装置において、
前記筐体変形検出手段として、前記筐体内部の気圧を測定する気圧測定手段を用い、
前記判定手段は、前記気圧測定手段によって測定される前記筐体内部の気圧の変動に基づいて、前記ポジショニング又は前記撮影準備が完了したか否かを判定する、
ことを特徴とする。
前記筐体変形検出手段として、前記筐体内部の気圧を測定する気圧測定手段を用い、
前記判定手段は、前記気圧測定手段によって測定される前記筐体内部の気圧の変動に基づいて、前記ポジショニング又は前記撮影準備が完了したか否かを判定する、
ことを特徴とする。
請求項3に記載の発明は、請求項2に記載の放射線画像撮影装置において、
前記判定手段は、前記気圧測定手段によって測定された前記筐体内部の気圧が予め設定した閾値を超えた後、測定開始時の気圧に戻った場合に、前記ポジショニング又は前記撮影準備が完了したと判定する、
ことを特徴とする。
前記判定手段は、前記気圧測定手段によって測定された前記筐体内部の気圧が予め設定した閾値を超えた後、測定開始時の気圧に戻った場合に、前記ポジショニング又は前記撮影準備が完了したと判定する、
ことを特徴とする。
請求項4に記載の発明は、請求項2に記載の放射線画像撮影装置において、
前記判定手段は、前記気圧測定手段によって測定された前記筐体内部の気圧が予め設定した第1の閾値を超えた後、当該第1の閾値とは異なる予め設定した第2の閾値を下回った場合に、前記ポジショニング又は前記撮影準備が完了したと判定する、
ことを特徴とする。
前記判定手段は、前記気圧測定手段によって測定された前記筐体内部の気圧が予め設定した第1の閾値を超えた後、当該第1の閾値とは異なる予め設定した第2の閾値を下回った場合に、前記ポジショニング又は前記撮影準備が完了したと判定する、
ことを特徴とする。
請求項5に記載の発明は、請求項2に記載の放射線画像撮影装置において、
前記筐体の動きを検出する動き検出手段を備え、
前記判定手段は、前記気圧測定手段によって測定される前記筐体内部の気圧の変動と、前記動き検出手段によって検出される前記筐体の動きと、に基づいて、前記ポジショニング又は前記撮影準備が完了したか否かを判定する、
ことを特徴とする。
前記筐体の動きを検出する動き検出手段を備え、
前記判定手段は、前記気圧測定手段によって測定される前記筐体内部の気圧の変動と、前記動き検出手段によって検出される前記筐体の動きと、に基づいて、前記ポジショニング又は前記撮影準備が完了したか否かを判定する、
ことを特徴とする。
請求項6に記載の発明は、請求項5に記載の放射線画像撮影装置において、
前記判定手段は、前記気圧測定手段によって測定された前記筐体内部の気圧が予め設定した閾値を超えた後、前記動き検出によって検出される前記筐体の動きが予め設定した範囲内に収まった場合に、前記ポジショニング又は前記撮影準備が完了したと判定する、
ことを特徴とする。
前記判定手段は、前記気圧測定手段によって測定された前記筐体内部の気圧が予め設定した閾値を超えた後、前記動き検出によって検出される前記筐体の動きが予め設定した範囲内に収まった場合に、前記ポジショニング又は前記撮影準備が完了したと判定する、
ことを特徴とする。
請求項7に記載の発明は、請求項5又は6に記載の放射線画像撮影装置において、
前記動き検出手段は、3軸加速度センサーである、
ことを特徴とする。
前記動き検出手段は、3軸加速度センサーである、
ことを特徴とする。
請求項8に記載の発明は、請求項1~7のいずれか一項に記載の放射線画像撮影装置において、
前記センサーパネルに放射線が照射されたことを検出可能な照射検出モードと、当該照射検出モードでの消費電力よりも小さい消費電力で動作する省電力モードと、のいずれかにモードを切り替える切替手段を備え、
前記切替手段は、放射線画像の撮影開始時は前記省電力モードに切り替え、前記判定手段によって前記ポジショニング又は前記撮影準備が完了したと判定された場合に、前記省電力モードから前記照射検出モードに切り替える、
ことを特徴とする。
前記センサーパネルに放射線が照射されたことを検出可能な照射検出モードと、当該照射検出モードでの消費電力よりも小さい消費電力で動作する省電力モードと、のいずれかにモードを切り替える切替手段を備え、
前記切替手段は、放射線画像の撮影開始時は前記省電力モードに切り替え、前記判定手段によって前記ポジショニング又は前記撮影準備が完了したと判定された場合に、前記省電力モードから前記照射検出モードに切り替える、
ことを特徴とする。
請求項9に記載の発明は、請求項8に記載の放射線画像撮影装置において、
前記切替手段によって前記省電力モードから前記照射検出モードに切り替えられたことを報知手段に報知させる報知制御手段を備える、
ことを特徴とする。
前記切替手段によって前記省電力モードから前記照射検出モードに切り替えられたことを報知手段に報知させる報知制御手段を備える、
ことを特徴とする。
請求項10に記載の発明の放射線画像撮影システムは、
請求項1~9のいずれか一項に記載の放射線画像撮影装置と、
放射線を曝射する放射線照射装置と、
を備え、
前記放射線画像撮影装置は、前記判定手段によって前記ポジショニング又は前記撮影準備が完了したと判定された場合、当該完了を前記放射線照射装置に通知する通知手段を備え、
前記放射線照射装置は、前記放射線画像撮影装置から前記通知を受けた場合、放射線の曝射を開始する、
ことを特徴とする。
請求項1~9のいずれか一項に記載の放射線画像撮影装置と、
放射線を曝射する放射線照射装置と、
を備え、
前記放射線画像撮影装置は、前記判定手段によって前記ポジショニング又は前記撮影準備が完了したと判定された場合、当該完了を前記放射線照射装置に通知する通知手段を備え、
前記放射線照射装置は、前記放射線画像撮影装置から前記通知を受けた場合、放射線の曝射を開始する、
ことを特徴とする。
本発明によれば、被験者のポジショニングが完了したか否かの判定を適切に行うことができる。
以下、図面を参照して本発明の実施の形態について説明する。ただし、以下に述べる実施形態には、本発明を実施するために技術的に好ましい種々の限定が付されているが、本発明の技術的範囲を以下の実施形態及び図示例に限定するものではない。
<第1の実施形態>
〔放射線画像撮影システムの構成〕
まず、第1の実施形態の構成を説明する。
第1の実施形態における放射線画像撮影システムは、図1に示すように、放射線照射装置10や、放射線画像撮影装置20、コンソール30、中継器40等で構成されている。
また、放射線画像撮影システムには、必要に応じて、図示しない放射線科情報システム(Radiology Information System、RIS)や、画像保存通信システム(Picture Archiving and Communication System:PACS)等が接続される。
〔放射線画像撮影システムの構成〕
まず、第1の実施形態の構成を説明する。
第1の実施形態における放射線画像撮影システムは、図1に示すように、放射線照射装置10や、放射線画像撮影装置20、コンソール30、中継器40等で構成されている。
また、放射線画像撮影システムには、必要に応じて、図示しない放射線科情報システム(Radiology Information System、RIS)や、画像保存通信システム(Picture Archiving and Communication System:PACS)等が接続される。
放射線照射装置10は、放射線源10aや、ジェネレーター10b、操作卓10c等を備えている。
放射線源10aは、放射線を生成可能な図示しない回転陽極や回転陽極に電子ビームを照射するフィラメント等を有している。
ジェネレーター10bは、放射線源10aが設定された管電圧や管電流、照射時間(mAs値)等に応じた線量の放射線を照射するように制御する。
操作卓10cは、放射線技師等のユーザーUが操作可能な曝射スイッチ10dを備えている。そして、操作卓10cは、曝射スイッチ10dが操作されたことに基づいて、ジェネレーター10bに対し放射線の照射開始等を指示するようになっている。
放射線源10aは、放射線を生成可能な図示しない回転陽極や回転陽極に電子ビームを照射するフィラメント等を有している。
ジェネレーター10bは、放射線源10aが設定された管電圧や管電流、照射時間(mAs値)等に応じた線量の放射線を照射するように制御する。
操作卓10cは、放射線技師等のユーザーUが操作可能な曝射スイッチ10dを備えている。そして、操作卓10cは、曝射スイッチ10dが操作されたことに基づいて、ジェネレーター10bに対し放射線の照射開始等を指示するようになっている。
放射線画像撮影装置20は、放射線が照射されたことを自ら検知する非連携方式のもの、すなわちAED(Auto Exposure Detection)機能を有するものとなっており、放射線照射装置10から放射線の照射を受けると、画像データを読み出し、その画像データを外部(コンソール30等)へ送信するようになっている。
なお、放射線画像撮影装置20の詳細については後述する。
なお、放射線画像撮影装置20の詳細については後述する。
コンソール30は、コンピューターや専用の装置等で構成されており、図示しない制御部や、記憶部等の他、表示部30a、操作部30b等を備えている。
表示部30aは、CRT(Cathode Ray Tube)やLCD(Liquid Crystal Display)等で構成されている。
操作部30bは、マウスやキーボード、タッチパネル等で構成されている。
表示部30aは、CRT(Cathode Ray Tube)やLCD(Liquid Crystal Display)等で構成されている。
操作部30bは、マウスやキーボード、タッチパネル等で構成されている。
中継器40は、放射線画像撮影装置20とコンソール30の間で、無線方式や有線方式での通信等を中継するためのアクセスポイントやハブの機能を備えている。
なお、中継器40を介すことなく、放射線画像撮影装置20とコンソール30間で直接に送受信するように構成してもよい。
なお、中継器40を介すことなく、放射線画像撮影装置20とコンソール30間で直接に送受信するように構成してもよい。
このように構成された放射線画像撮影システムは、操作者であるユーザーUが曝射スイッチ10dを操作すると、放射線照射装置10が、操作卓10cで設定した条件で放射線を患者へと照射する。そして、患者の背後に位置する放射線画像撮影装置20が患者を透過してきた放射線を受け、それに基づいて画像データを読み出し、読み出した画像データを、中継器40を介してコンソール30に送信するようになっている。
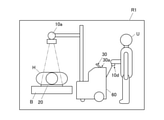
なお、本実施形態の放射線画像撮影システムは、例えば、図1に示すように、固定された放射線照射装置10と組み合わせることも可能であるし、図2に示すように、回診車60と組み合わせて用いることも可能である。回診車60と組み合わせて用いることで、放射線技師等のユーザーUが、移動が困難な患者Hがいる病室R1へと直接出向いて放射線画像の撮影を行うことが可能となっている。
放射線画像撮影システムを病院等の建物内に設置する場合は、図1に示すように、放射線照射装置10の放射線源10aや、ジェネレーター10b、放射線画像撮影装置20、中継器40等を撮影室Ra内に配置し、放射線照射装置10の操作卓10cや、コンソール30等を前室Rb(操作室等ともいう。)に設置するようにする。その際、放射線画像撮影装置20を、撮影台(立位撮影用の撮影台50Aや臥位撮影用の撮影台50B)のカセッテホルダー50aに装填して用いるように構成することが可能である。中継器40を撮影室Ra内に配置することで、コンソール30を前室Rbに設置しても、無線通信性能を維持したり、有線ケーブルの接続を容易にしたりすることが可能となる。
一方、放射線画像撮影システムを回診車60と組み合わせる場合は、図2に示すように、放射線画像撮影装置20以外の構成を回診車60の本体内に内蔵し、放射線画像撮影装置20を持ち運べるようにしておく。そして、この回診車60を用いて放射線画像の撮影を行う際には、放射線画像撮影装置20を、例えば、ベッドBとその上に横たわる患者Hとの間に差し込んだり、患者Hにあてがったりする。放射線画像撮影装置20とコンソール30間を直接通信することで、中継器40を必要としない構成としても良いし、図示しない中継器40を介して通信することも可能である。
〔放射線画像撮影装置の構成〕
続いて、放射線画像撮影装置20の具体的構成について説明する。図3は放射線画像撮影装置20の斜視図、図4は放射線画像撮影装置20が備える放射線検出部3の正面図、図5は放射線画像撮影装置20の概略回路構成を表すブロック図である。
続いて、放射線画像撮影装置20の具体的構成について説明する。図3は放射線画像撮影装置20の斜視図、図4は放射線画像撮影装置20が備える放射線検出部3の正面図、図5は放射線画像撮影装置20の概略回路構成を表すブロック図である。
本実施形態における放射線画像撮影装置20は、図3~図5に示したように、筐体1の他、この筐体1に収納される、シンチレーター2、放射線検出部3、走査駆動部4、読み出し部5、制御部6、記憶部7、通信部8、内蔵電源9、気圧センサー14等を具備したセンサーパネルSPを備えている。
筐体1の一側面には、図3に示したように、電源スイッチ11や切替スイッチ12、インジケーター13、コネクター82等が設けられている。
筐体1の一側面には、図3に示したように、電源スイッチ11や切替スイッチ12、インジケーター13、コネクター82等が設けられている。
シンチレーター2は、板状に形成されており、放射線を受けると放射線検出部3へ向けて可視光等の放射線よりも波長の長い電磁波を発するようになっている。
放射線検出部3は、図4に示したように、基板31や、複数の走査線32、複数の信号線33、複数の放射線検出素子34、複数のTFT35(スイッチ素子)、複数のバイアス線36、結線37等で構成されている。
基板31は、ガラスや、ベースフィルム、シリコン等の半導体材料等を用いて板状に形成され、シンチレーター2と並行して配置されている。
基板31上には、複数の放射線検出素子34が二次元的に配置されている。
放射線検出素子34の一方の端子には、スイッチ素子であるTFT35のドレイン端子が、他方の端子にはバイアス線36がそれぞれ接続されている。
基板31上には、複数の放射線検出素子34が二次元的に配置されている。
放射線検出素子34の一方の端子には、スイッチ素子であるTFT35のドレイン端子が、他方の端子にはバイアス線36がそれぞれ接続されている。
走査線32は、複数のTFT35のゲート端子と接続され、複数の走査線32が配置されている。この走査線32はゲート線とも呼称される。
各信号線33は、走査線32と直交するように配置され、複数のTFT35のソース端子と接続され、複数の信号線33が配置されている。
各走査線32と各信号線33のそれぞれの端部には、端子32a,33aが形成され、基板31から配線を引き出せる構成となっている。
なお、走査線は、一つの放射線画像撮影装置20につき、例えば2430本であり、信号線は1996本などである。
各信号線33は、走査線32と直交するように配置され、複数のTFT35のソース端子と接続され、複数の信号線33が配置されている。
各走査線32と各信号線33のそれぞれの端部には、端子32a,33aが形成され、基板31から配線を引き出せる構成となっている。
なお、走査線は、一つの放射線画像撮影装置20につき、例えば2430本であり、信号線は1996本などである。
複数のバイアス線36は、結線37で接続され、同様に端子37aが形成されている。
なお、本実施形態のバイアス線36は、結線37で接続する構成としているが、各バイアス線36に端子37aを構成しても良いし、所定の本数毎に結線37で接続し、複数の端子37aを構成しても良い。結線37で接続するとバイアス線36を流れる電流が集中し、配線抵抗による電圧降下が大きくなってしまうが、分割することで、電圧降下を低減する効果が得られる。
また、バイアス線36は、配線抵抗の影響を低減するため、全面に面形状となるように配置しても良いし、縦横に配置した配線が交差部で接続した井桁形状となるように配置しても良い。
なお、本実施形態のバイアス線36は、結線37で接続する構成としているが、各バイアス線36に端子37aを構成しても良いし、所定の本数毎に結線37で接続し、複数の端子37aを構成しても良い。結線37で接続するとバイアス線36を流れる電流が集中し、配線抵抗による電圧降下が大きくなってしまうが、分割することで、電圧降下を低減する効果が得られる。
また、バイアス線36は、配線抵抗の影響を低減するため、全面に面形状となるように配置しても良いし、縦横に配置した配線が交差部で接続した井桁形状となるように配置しても良い。
放射線検出素子34は、当該放射線検出素子に照射された放射線の線量(或いはシンチレーター2で変換された電磁波の光量)に応じた電気信号(電流、電荷)をそれぞれ発生させるもので、例えばフォトダイオードや、フォトトランジスター等で構成されている。なお、構成が異なるCCD方式で構成してもよい。
各放射線検出素子34は、複数の走査線32及び複数の信号線33によって区画された複数の領域r(画素)にそれぞれ設けられている。すなわち、本実施形態の放射線検出素子34は、二次元状(マトリクス状)に分布するよう配列されている。筐体1に収納された放射線検出部3の各放射線検出素子34は、シンチレーター2と対向するようになっている。
各放射線検出素子34は、複数の走査線32及び複数の信号線33によって区画された複数の領域r(画素)にそれぞれ設けられている。すなわち、本実施形態の放射線検出素子34は、二次元状(マトリクス状)に分布するよう配列されている。筐体1に収納された放射線検出部3の各放射線検出素子34は、シンチレーター2と対向するようになっている。
TFT35は、放射線検出素子部(放射線検出素子34の等価容量及び当該放射線検出素子34と並列に接続した容量)に電荷を保持するためのもので、放射線検出素子34と同様、複数の領域rにそれぞれ設けられている。各TFT35は、ゲート電極が近接する走査線32に接続され、ソース電極が近接する信号線33に接続され、ドレイン電極が同じ領域r内の放射線検出素子34に接続されている。このため、放射線検出素子34は、走査線32や信号線33と間接的に接続されることとなる。
なお、TFT35は、複数の領域rの内のいくつかに対しては、放射線検出素子34と信号線33を配線で接続し、TFT35を配置しないものを設けてもよい。
また、TFT35のソース電極とドレイン電極は同じ機能をするため、入れ替えても良い。
なお、TFT35は、複数の領域rの内のいくつかに対しては、放射線検出素子34と信号線33を配線で接続し、TFT35を配置しないものを設けてもよい。
また、TFT35のソース電極とドレイン電極は同じ機能をするため、入れ替えても良い。
また、複数のバイアス線36は、各信号線33と信号線33との間に信号線33と平行になるように、かつ交差する走査線32と導通しないように設けられている。
結線37は、基板31の縁部において、走査線32と平行に延びるように設けられている。結線37には、複数のバイアス線36が接続されている。また、結線37の端部には、端子37aが形成されている。
結線37は、基板31の縁部において、走査線32と平行に延びるように設けられている。結線37には、複数のバイアス線36が接続されている。また、結線37の端部には、端子37aが形成されている。
走査駆動部4は、図5に示したように、電源回路41や、ゲートドライバー42等で構成されている。
電源回路41は、それぞれ電圧の異なるオン電圧とオフ電圧を生成し、ゲートドライバー42に供給するようになっている。
ゲートドライバー42は、走査線32の各ラインL1~Lxに印加する電圧をオン電圧とオフ電圧との間で順次切り替えるようになっている。
電源回路41は、それぞれ電圧の異なるオン電圧とオフ電圧を生成し、ゲートドライバー42に供給するようになっている。
ゲートドライバー42は、走査線32の各ラインL1~Lxに印加する電圧をオン電圧とオフ電圧との間で順次切り替えるようになっている。
読み出し部5は、複数の読み出し回路51や、アナログマルチプレクサー52、A/D変換器53等を備えている。
各読み出し回路51は、各信号線33にそれぞれ接続されている。
また、各読み出し回路51は、積分回路51aと相関二重サンプリング回路(以下、CDS回路)51b等で構成されている。
各読み出し回路51は、各信号線33にそれぞれ接続されている。
また、各読み出し回路51は、積分回路51aと相関二重サンプリング回路(以下、CDS回路)51b等で構成されている。
積分回路51aは、信号線33に放出された電荷を積分し、積分された電荷量に応じた電圧値をCDS回路51bへ出力するようになっている。
CDS回路51bは、信号を読み出す対象の放射線検出素子34が接続された走査線32にオン電圧を印加する前(オフ電圧を印加している間)に、積分回路51aの出力電圧をサンプリングホールドし、該当の走査線32にオン電圧を印加して放射線検出素子の信号電荷を読み出し、該当の走査線32にオフ電圧を印加した後の積分回路51aの出力電圧の差分を出力するようになっている。
なお、信号電荷を読み出した後の積分回路51aの出力電圧もサンプリングホールドして差分するようにしても良い。
CDS回路51bは、信号を読み出す対象の放射線検出素子34が接続された走査線32にオン電圧を印加する前(オフ電圧を印加している間)に、積分回路51aの出力電圧をサンプリングホールドし、該当の走査線32にオン電圧を印加して放射線検出素子の信号電荷を読み出し、該当の走査線32にオフ電圧を印加した後の積分回路51aの出力電圧の差分を出力するようになっている。
なお、信号電荷を読み出した後の積分回路51aの出力電圧もサンプリングホールドして差分するようにしても良い。
アナログマルチプレクサー52は、CDS回路51bから出力された複数の差分信号を一つずつA/D変換器53へ出力するようになっている。なお、複数の画素から1つの画素(例えば、4画素を平均化した1画素)を生成するため、入力された複数の差分信号のうち2つ以上をA/D変換器53へ出力できるようにしても良い。
A/D変換器53は、入力されたアナログ電圧値の画像データをデジタル値の画像データに順次変換するようになっている。なお、アナログマルチプレクサー52を利用する構成だけでなく、CDS回路毎にA/D変換機53を構成してもよい。
A/D変換器53は、入力されたアナログ電圧値の画像データをデジタル値の画像データに順次変換するようになっている。なお、アナログマルチプレクサー52を利用する構成だけでなく、CDS回路毎にA/D変換機53を構成してもよい。
制御部(判定手段、切替手段)6は、図示しないCPU(Central Processing Unit)やROM(Read Only Memory)、RAM(Random Access Memory)、入出力インターフェース等がバスに接続されたコンピューターや、FPGA(Field Programmable Gate Array)等で構成されている。なお、専用の制御回路で構成されていてもよい。
制御部6は、所定の検知方式により放射線の照射開始を検知するようになっている。具体的な検知方法は特に限られるものでは無いが、例えば、図示しない放射線センサーや読み出し部5からの信号や、バイアス電源9Bの電流変化に基づいて行うようにすることができる。
制御部6は、所定の検知方式により放射線の照射開始を検知するようになっている。具体的な検知方法は特に限られるものでは無いが、例えば、図示しない放射線センサーや読み出し部5からの信号や、バイアス電源9Bの電流変化に基づいて行うようにすることができる。
記憶部7は、SRAM(Static RAM)やSDRAM(Synchronous DRAM)、NAND型フラッシュメモリー、HDD(Hard Disk Drive)等で構成されている。
通信部8は、アンテナ81やコネクター82を介して外部と無線方式や有線方式で通信を行うようになっている。
内蔵電源9は、リチウムイオン電池やリチウムイオンキャパシタ等で構成され、放射線検出部3や走査駆動部4等に電力を供給するようになっている。
気圧センサー(気圧測定手段(筐体変形検出手段))14は、筐体1内部の気圧を測定するためのものであり、測定された気圧データを制御部6に出力するようになっている。
通信部8は、アンテナ81やコネクター82を介して外部と無線方式や有線方式で通信を行うようになっている。
内蔵電源9は、リチウムイオン電池やリチウムイオンキャパシタ等で構成され、放射線検出部3や走査駆動部4等に電力を供給するようになっている。
気圧センサー(気圧測定手段(筐体変形検出手段))14は、筐体1内部の気圧を測定するためのものであり、測定された気圧データを制御部6に出力するようになっている。
〔荷重と気圧変動との関係〕
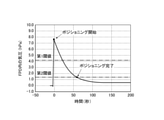
図6(a)に示すように、放射線画像撮影装置20の平面部に荷重(押圧)をかけると筐体1が変形することで筐体1内部の気圧が変動し、図6(b)に示すように、当該気圧が或る数値まで増加する。その後、筐体1に形成されている通気口1aや微小な隙間(図示省略)より空気が入り込むことで筐体1内部の気圧が元(大気圧)に戻る特徴がある。なお、図6(b)のグラフでは、大気圧を基準(0.0)として筐体1内部の気圧を表している(以下、図8、図11、図12、図14、図15のグラフも同様)。
そこで、本実施形態の放射線画像撮影装置20では、上記の特徴を用いて被験者のポジショニング動作の判定を行うようにしている。つまり、本実施形態では、放射線画像撮影装置20を、図2に示すように、ベッドBとその上に横たわる患者Hとの間に差し込んで使用する場合を想定している。
以下、放射線画像撮影装置20が実行する処理の一つである、ポジショニング動作判定処理の詳細について説明する。
図6(a)に示すように、放射線画像撮影装置20の平面部に荷重(押圧)をかけると筐体1が変形することで筐体1内部の気圧が変動し、図6(b)に示すように、当該気圧が或る数値まで増加する。その後、筐体1に形成されている通気口1aや微小な隙間(図示省略)より空気が入り込むことで筐体1内部の気圧が元(大気圧)に戻る特徴がある。なお、図6(b)のグラフでは、大気圧を基準(0.0)として筐体1内部の気圧を表している(以下、図8、図11、図12、図14、図15のグラフも同様)。
そこで、本実施形態の放射線画像撮影装置20では、上記の特徴を用いて被験者のポジショニング動作の判定を行うようにしている。つまり、本実施形態では、放射線画像撮影装置20を、図2に示すように、ベッドBとその上に横たわる患者Hとの間に差し込んで使用する場合を想定している。
以下、放射線画像撮影装置20が実行する処理の一つである、ポジショニング動作判定処理の詳細について説明する。
〔ポジショニング動作判定処理〕
図7は、第1の実施形態の放射線画像撮影装置20によって実行されるポジショニング動作判定処理のフローチャートである。
本実施形態の放射線画像撮影装置20の制御部6は、所定の撮影開始条件が成立したことを契機として、ポジショニング動作判定処理を実行するようになっている。
図7は、第1の実施形態の放射線画像撮影装置20によって実行されるポジショニング動作判定処理のフローチャートである。
本実施形態の放射線画像撮影装置20の制御部6は、所定の撮影開始条件が成立したことを契機として、ポジショニング動作判定処理を実行するようになっている。
具体的には、図7に示すように、まず、制御部6は、放射線画像撮影装置20のモードを、放射線照射検出モードでの消費電力よりも小さい消費電力で動作する省電力モードへ遷移させる(ステップS1)。なお、この省電力モードは、上述のように放射線照射検出モードでの消費電力よりも小さければ良く、当該省電力モードでの放射線画像撮影装置20の状態はどのような状態であっても良い。
次いで、制御部6は、気圧センサー14を用いて筐体1内部の気圧測定を開始する(ステップS2)。続けて、制御部6は、図8に示すように、測定開始時における気圧(気圧データ)をRAMに一時記憶する(ステップS3)。
次いで、制御部6は、筐体1内部の気圧が予め定められた閾値(図8参照)を超えたか否かを判定する(ステップS4)。
ステップS4において、筐体1内部の気圧が予め定められた閾値を超えていないと判定された場合(ステップS4;NO)、制御部6は、筐体1内部の気圧が閾値を超えるまでの間、ステップS4の判定処理を繰り返し行う。
一方、ステップS4において、筐体1内部の気圧が予め定められた閾値を超えたと判定された場合(ステップS4;YES)、制御部6は、筐体1内部の気圧がピークに到達したか否かを判定する(ステップS5)。
一方、ステップS4において、筐体1内部の気圧が予め定められた閾値を超えたと判定された場合(ステップS4;YES)、制御部6は、筐体1内部の気圧がピークに到達したか否かを判定する(ステップS5)。
ステップS5において、筐体1内部の気圧がピークに到達していないと判定された場合(ステップS5;NO)、制御部6は、筐体1内部の気圧がピークに到達するまでの間、ステップS5の判定処理を繰り返し行う。
一方、ステップS5において、筐体1内部の気圧がピークに到達したと判定された場合(ステップS5;YES)、制御部6は、図8に示すように、ピークに到達した時間(タイミング)において、被験者のポジショニング(撮影準備)が開始されたと判定する(ステップS6)。
一方、ステップS5において、筐体1内部の気圧がピークに到達したと判定された場合(ステップS5;YES)、制御部6は、図8に示すように、ピークに到達した時間(タイミング)において、被験者のポジショニング(撮影準備)が開始されたと判定する(ステップS6)。
次いで、制御部6は、筐体1内部の気圧が測定開始時の気圧、すなわちステップS3でRAMに一時記憶された気圧に戻ったか否かを判定する(ステップS7)。
ステップS7において、筐体1内部の気圧が測定開始時の気圧に戻っていないと判定された場合(ステップS7;NO)、制御部6は、筐体1内部の気圧が測定開始時の気圧に戻るまでの間、ステップS7の判定処理を繰り返し行う。
一方、ステップS7において、筐体1内部の気圧が測定開始時の気圧に戻ったと判定された場合(ステップS7;YES)、制御部6は、図8に示すように、測定開始時の気圧に戻った時間(タイミング)において、被験者のポジショニング(撮影準備)が完了したと判定する(ステップS8)。
一方、ステップS7において、筐体1内部の気圧が測定開始時の気圧に戻ったと判定された場合(ステップS7;YES)、制御部6は、図8に示すように、測定開始時の気圧に戻った時間(タイミング)において、被験者のポジショニング(撮影準備)が完了したと判定する(ステップS8)。
次いで、制御部6は、放射線画像撮影装置20のモードを省電力モードから放射線照射検出モードへ遷移させ(ステップS9)、ポジショニング動作判定処理を終了する。
制御部6は、放射線照射検出モードへの遷移後、図9に示すように、放射線照射装置10から放射線の照射を受けると、画像データを蓄積して当該画像データを読み出しする。そして、制御部6は、この画像データを外部(コンソール30等)へ転送(送信)した後、スリープモードへ遷移させる。ここで、スリープモードとは、例えば、放射線検出部3や走査駆動部4等には電力を供給せず、外部からの信号の送信等があった場合にそれを受信できるようにするための通信部8等の必要な機能部にのみ電力を供給するモードである。
以上説明したように、第1の実施形態の放射線画像撮影装置20の制御部6は、筐体1の変形を検出し、検出された筐体1の変形量から被験者のポジショニング(撮影準備)が完了したか否かを判定する。具体的には、制御部6は、気圧センサー14によって測定される筐体1内部の気圧の変動に基づいて、被験者のポジショニング(撮影準備)が完了したか否かを判定する。
したがって、第1の実施形態の放射線画像撮影装置20によれば、被験者のポジショニング動作と相関のある筐体1内部の気圧の変動から当該ポジショニング(撮影準備)が完了したか否かを判定するので、当該判定を適切に行うことができる。
したがって、第1の実施形態の放射線画像撮影装置20によれば、被験者のポジショニング動作と相関のある筐体1内部の気圧の変動から当該ポジショニング(撮影準備)が完了したか否かを判定するので、当該判定を適切に行うことができる。
また、制御部6は、気圧センサー14によって測定された筐体1内部の気圧が予め設定した閾値を超えた後、測定開始時の気圧に戻った場合に、被験者のポジショニング(撮影準備)が完了したと判定する。
したがって、第1の実施形態の放射線画像撮影装置20によれば、例えば、物(被験者よりも軽い物体)が放射線画像撮影装置20の平面部に置かれた後、当該物が取り除かれた場合など、筐体1内部の気圧が予め設定した閾値を超えることなく、測定開始時の気圧に戻った場合にも、被験者のポジショニング(撮影準備)が完了したと誤った判定がなされてしまうことを抑制することができる。
したがって、第1の実施形態の放射線画像撮影装置20によれば、例えば、物(被験者よりも軽い物体)が放射線画像撮影装置20の平面部に置かれた後、当該物が取り除かれた場合など、筐体1内部の気圧が予め設定した閾値を超えることなく、測定開始時の気圧に戻った場合にも、被験者のポジショニング(撮影準備)が完了したと誤った判定がなされてしまうことを抑制することができる。
また、制御部6は、放射線画像の撮影開始時は省電力モードに切り替え、被験者のポジショニング(撮影準備)が完了したと判定された場合に、当該省電力モードから放射線照射検出モードに切り替える。
したがって、第1の実施形態の放射線画像撮影装置20によれば、放射線画像の撮影開始時から被験者のポジショニング(撮影準備)が完了するまでの間は、当該装置のモードを省電力モードにしておくことができるので、電力を無駄に消費しないようにすることができ、内蔵電源9による駆動時間を延ばすことができる。また、この放射線画像撮影装置20によれば、放射線画像の撮影の際に、省電力モードから放射線照射検出モードへの切り替えを自動的に行うことができるので、当該モードの切り替えを簡便かつ円滑に行うことが可能となる。
したがって、第1の実施形態の放射線画像撮影装置20によれば、放射線画像の撮影開始時から被験者のポジショニング(撮影準備)が完了するまでの間は、当該装置のモードを省電力モードにしておくことができるので、電力を無駄に消費しないようにすることができ、内蔵電源9による駆動時間を延ばすことができる。また、この放射線画像撮影装置20によれば、放射線画像の撮影の際に、省電力モードから放射線照射検出モードへの切り替えを自動的に行うことができるので、当該モードの切り替えを簡便かつ円滑に行うことが可能となる。
<変形例>
次に、第1の実施形態の変形例について説明する。
この変形例における構成は、第1の実施形態で説明したものと同様であるので説明を省略し、以下、第1の実施形態の変形例のポジショニング動作判定処理について説明する。この変形例のポジショニング動作判定処理は、上述した第1の実施形態とは異なり、筐体1内部の気圧が予め定められた閾値を超えた後、必ずしも測定開始時の気圧に戻らないケースを考慮した処理となっている。
次に、第1の実施形態の変形例について説明する。
この変形例における構成は、第1の実施形態で説明したものと同様であるので説明を省略し、以下、第1の実施形態の変形例のポジショニング動作判定処理について説明する。この変形例のポジショニング動作判定処理は、上述した第1の実施形態とは異なり、筐体1内部の気圧が予め定められた閾値を超えた後、必ずしも測定開始時の気圧に戻らないケースを考慮した処理となっている。
〔ポジショニング動作判定処理〕
図10は、第1の実施形態の変形例の放射線画像撮影装置20によって実行されるポジショニング動作判定処理のフローチャートである。
図10に示すように、まず、制御部6は、放射線画像撮影装置20のモードを、放射線照射検出モードでの消費電力よりも小さい消費電力で動作する省電力モードへ遷移させる(ステップS11)。
図10は、第1の実施形態の変形例の放射線画像撮影装置20によって実行されるポジショニング動作判定処理のフローチャートである。
図10に示すように、まず、制御部6は、放射線画像撮影装置20のモードを、放射線照射検出モードでの消費電力よりも小さい消費電力で動作する省電力モードへ遷移させる(ステップS11)。
次いで、制御部6は、気圧センサー14を用いて筐体1内部の気圧測定を開始する(ステップS12)。
次いで、制御部6は、図11に示すように、筐体1内部の気圧が予め定められた第1閾値を超えたか否かを判定する(ステップS13)。
ステップS13において、筐体1内部の気圧が予め定められた第1閾値を超えていないと判定された場合(ステップS13;NO)、制御部6は、筐体1内部の気圧が第1閾値を超えるまでの間、ステップS13の判定処理を繰り返し行う。
一方、ステップS13において、筐体1内部の気圧が予め定められた第1閾値を超えたと判定された場合(ステップS13;YES)、制御部6は、筐体1内部の気圧がピークに到達したか否かを判定する(ステップS14)。
一方、ステップS13において、筐体1内部の気圧が予め定められた第1閾値を超えたと判定された場合(ステップS13;YES)、制御部6は、筐体1内部の気圧がピークに到達したか否かを判定する(ステップS14)。
ステップS14において、筐体1内部の気圧がピークに到達していないと判定された場合(ステップS14;NO)、制御部6は、筐体1内部の気圧がピークに到達するまでの間、ステップS14の判定処理を繰り返し行う。
一方、ステップS14において、筐体1内部の気圧がピークに到達したと判定された場合(ステップS14;YES)、制御部6は、図11に示すように、ピークに到達した時間(タイミング)において、被験者のポジショニングが開始されたと判定する(ステップS15)。
一方、ステップS14において、筐体1内部の気圧がピークに到達したと判定された場合(ステップS14;YES)、制御部6は、図11に示すように、ピークに到達した時間(タイミング)において、被験者のポジショニングが開始されたと判定する(ステップS15)。
次いで、制御部6は、筐体1内部の気圧が予め定められた第2閾値を下回ったか否かを判定する(ステップS16)。なお、ステップS16の判定処理で用いる第2閾値は、ステップS13の判定処理で用いる第1閾値と同じ値の閾値であっても良い。
ステップS16において、筐体1内部の気圧が予め定められた第2閾値を下回っていないと判定された場合(ステップS16;NO)、制御部6は、筐体1内部の気圧が第2閾値を下回るまでの間、ステップS16の判定処理を繰り返し行う。
一方、ステップS16において、筐体1内部の気圧が予め定められた第2閾値を下回ったと判定された場合(ステップS16;YES)、制御部6は、図11に示すように、筐体1内部の気圧が第2閾値を下回った時間(タイミング)において、被験者のポジショニングが完了したと判定する(ステップS17)。
一方、ステップS16において、筐体1内部の気圧が予め定められた第2閾値を下回ったと判定された場合(ステップS16;YES)、制御部6は、図11に示すように、筐体1内部の気圧が第2閾値を下回った時間(タイミング)において、被験者のポジショニングが完了したと判定する(ステップS17)。
次いで、制御部6は、放射線画像撮影装置20のモードを省電力モードから放射線照射検出モードへ遷移させ(ステップS18)、ポジショニング動作判定処理を終了する。
以上説明したように、変形例の放射線画像撮影装置20は、気圧センサー14によって測定された筐体1内部の気圧が予め設定した第1閾値を超えた後、当該第1閾値とは異なる予め設定した第2閾値を下回った場合に、被験者のポジショニングが完了したと判定する。
したがって、変形例の放射線画像撮影装置20によれば、筐体1内部の上昇した気圧が測定開始時の気圧に戻らないケースであっても、被験者のポジショニングが完了したか否かの判定を適切に行うことができる。
したがって、変形例の放射線画像撮影装置20によれば、筐体1内部の上昇した気圧が測定開始時の気圧に戻らないケースであっても、被験者のポジショニングが完了したか否かの判定を適切に行うことができる。
<第2の実施形態>
次に、第2の実施形態について説明する。
第2の実施形態における構成は、放射線画像撮影装置20が自装置の動きを検出するための3軸加速度センサー(動き検出手段)(図示省略)を備えている他は、第1の実施形態で説明したものと同様であるので説明を省略し、以下、第2の実施形態のポジショニング動作判定処理について説明する。
次に、第2の実施形態について説明する。
第2の実施形態における構成は、放射線画像撮影装置20が自装置の動きを検出するための3軸加速度センサー(動き検出手段)(図示省略)を備えている他は、第1の実施形態で説明したものと同様であるので説明を省略し、以下、第2の実施形態のポジショニング動作判定処理について説明する。
上述したように、第1の実施形態の放射線画像撮影装置20では、筐体1内部の気圧変動に基づいて、被験者のポジショニングが完了したか否かの判定を行うようにしている。
しかし、この気圧変動は、筐体1内の密閉度状態に応じて、その変動態様が変わることが分っている。具体的には、図12に示すように、新品状態の放射線画像撮影装置20の場合、筐体1内の密閉度が高いため、筐体1内部の上昇した気圧が大気圧に戻るまでの時間が長い。一方、経年劣化した放射線画像撮影装置20の場合、筐体1内の密閉度が低いため、筐体1内部の上昇した気圧が大気圧に戻るまでの時間が短い。
しかし、この気圧変動は、筐体1内の密閉度状態に応じて、その変動態様が変わることが分っている。具体的には、図12に示すように、新品状態の放射線画像撮影装置20の場合、筐体1内の密閉度が高いため、筐体1内部の上昇した気圧が大気圧に戻るまでの時間が長い。一方、経年劣化した放射線画像撮影装置20の場合、筐体1内の密閉度が低いため、筐体1内部の上昇した気圧が大気圧に戻るまでの時間が短い。
つまり、新品状態の放射線画像撮影装置20の場合、実際には被験者のポジショニングが完了しているにもかかわらず当該ポジショニング完了の判定がなされないケースが発生する。この結果、放射線照射検出モード(図9参照)への移行が遅れてしまい、放射線画像の撮影に時間がかかってしまうといった問題がある。一方、経年劣化した放射線画像撮影装置20の場合、実際には被験者のポジショニングが完了していないにもかかわらず当該ポジショニング完了の判定がなされてしまうケースが発生する。この結果、被験者のポジショニング中に放射線照射検出モードへ移行してしまい、電力を余計に消費してしまうといった問題がある。
そこで、第2の実施形態の放射線画像撮影装置20では、被験者のポジション開始の判定に関しては、第1の実施形態と同様の方法で行う一方、被験者のポジショニング完了の判定に関しては、上述した3軸加速度センサーを用いて3軸の加速度が一定の範囲に収まった場合、すなわち放射線画像撮影装置20の動きが収束した場合に、被験者のポジショニングが完了したと判定することを特徴としている。以下、第2の実施形態のポジショニング動作判定処理について説明する。
そこで、第2の実施形態の放射線画像撮影装置20では、被験者のポジション開始の判定に関しては、第1の実施形態と同様の方法で行う一方、被験者のポジショニング完了の判定に関しては、上述した3軸加速度センサーを用いて3軸の加速度が一定の範囲に収まった場合、すなわち放射線画像撮影装置20の動きが収束した場合に、被験者のポジショニングが完了したと判定することを特徴としている。以下、第2の実施形態のポジショニング動作判定処理について説明する。
〔ポジショニング動作判定処理〕
図13は、第2の実施形態の放射線画像撮影装置20によって実行されるポジショニング動作判定処理のフローチャートである。
図13に示すように、まず、制御部6は、放射線画像撮影装置20のモードを、放射線照射検出モードでの消費電力よりも小さい消費電力で動作する省電力モードへ遷移させる(ステップS21)。
図13は、第2の実施形態の放射線画像撮影装置20によって実行されるポジショニング動作判定処理のフローチャートである。
図13に示すように、まず、制御部6は、放射線画像撮影装置20のモードを、放射線照射検出モードでの消費電力よりも小さい消費電力で動作する省電力モードへ遷移させる(ステップS21)。
次いで、制御部6は、気圧センサー14を用いて筐体1内部の気圧測定を開始するとともに、3軸加速度センサー(図示省略)を用いて放射線画像撮影装置20の3軸の加速度測定を開始する(ステップS22)。
次いで、制御部6は、図14に示すように、筐体1内部の気圧が予め定められた閾値を超えたか否かを判定する(ステップS23)。
ステップS23において、筐体1内部の気圧が予め定められた閾値を超えていないと判定された場合(ステップS23;NO)、制御部6は、筐体1内部の気圧が閾値を超えるまでの間、ステップS23の判定処理を繰り返し行う。
一方、ステップS23において、筐体1内部の気圧が予め定められた閾値を超えたと判定された場合(ステップS23;YES)、制御部6は、筐体1内部の気圧がピークに到達したか否かを判定する(ステップS24)。
一方、ステップS23において、筐体1内部の気圧が予め定められた閾値を超えたと判定された場合(ステップS23;YES)、制御部6は、筐体1内部の気圧がピークに到達したか否かを判定する(ステップS24)。
ステップS24において、筐体1内部の気圧がピークに到達していないと判定された場合(ステップS24;NO)、制御部6は、筐体1内部の気圧がピークに到達するまでの間、ステップS24の判定処理を繰り返し行う。
一方、ステップS24において、筐体1内部の気圧がピークに到達したと判定された場合(ステップS24;YES)、制御部6は、図14に示すように、ピークに到達した時間(タイミング)において、被験者のポジショニングが開始されたと判定する(ステップS25)。
一方、ステップS24において、筐体1内部の気圧がピークに到達したと判定された場合(ステップS24;YES)、制御部6は、図14に示すように、ピークに到達した時間(タイミング)において、被験者のポジショニングが開始されたと判定する(ステップS25)。
次いで、制御部6は、3軸加速度センサーによって測定された3軸の加速度が一定の範囲内に収まったか否かを判定する(ステップS26)。
ステップS26において、3軸の加速度が一定の範囲内に収まっていないと判定された場合(ステップS26;NO)、制御部6は、3軸の加速度が一定の範囲内に収まるまでの間、ステップS26の判定処理を繰り返し行う。
一方、ステップS26において、3軸の加速度が一定の範囲内に収まったと判定された場合(ステップS26;YES)、制御部6は、図14に示すように、3軸の加速度が一定の範囲内に収まった時間(タイミング)において、被験者のポジショニングが完了したと判定する(ステップS27)。
一方、ステップS26において、3軸の加速度が一定の範囲内に収まったと判定された場合(ステップS26;YES)、制御部6は、図14に示すように、3軸の加速度が一定の範囲内に収まった時間(タイミング)において、被験者のポジショニングが完了したと判定する(ステップS27)。
次いで、制御部6は、放射線画像撮影装置20のモードを省電力モードから放射線照射検出モードへ遷移させ(ステップS28)、ポジショニング動作判定処理を終了する。
以上説明したように、第2の実施形態の放射線画像撮影装置20の制御部6は、気圧センサー14によって測定される筐体1内部の気圧の変動と、3軸加速度センサー(図示省略)によって検出される筐体1の動きと、に基づいて、被験者のポジショニングが完了したか否かを判定する。具体的には、制御部6は、気圧センサー14によって測定された筐体1内部の気圧が予め設定した閾値を超えた後、3軸加速度センサーによって検出される筐体1の動き(3軸の加速度)が予め設定した範囲内に収まった場合に、被験者のポジショニングが完了したと判定する。
したがって、第2の実施形態の放射線画像撮影装置20によれば、筐体1の密閉度に影響することなく、すなわち放射線画像撮影装置20の使用状態に影響することなく、被験者のポジショニングが完了したか否かを判定することができるので、当該判定をより適切に行うことができる。
この結果、実際の被験者のポジショニング完了タイミングと、当該ポジショニング完了の判定タイミングと、のズレを抑制することができるので、放射線照射検出モードへの移行が遅れてしまうことで放射線画像の撮影に時間がかかってしまうといった問題や、被験者のポジショニング中に放射線照射検出モードへ移行してしまい、電力を余計に消費してしまうといった問題を解消することができる。
したがって、第2の実施形態の放射線画像撮影装置20によれば、筐体1の密閉度に影響することなく、すなわち放射線画像撮影装置20の使用状態に影響することなく、被験者のポジショニングが完了したか否かを判定することができるので、当該判定をより適切に行うことができる。
この結果、実際の被験者のポジショニング完了タイミングと、当該ポジショニング完了の判定タイミングと、のズレを抑制することができるので、放射線照射検出モードへの移行が遅れてしまうことで放射線画像の撮影に時間がかかってしまうといった問題や、被験者のポジショニング中に放射線照射検出モードへ移行してしまい、電力を余計に消費してしまうといった問題を解消することができる。
以上、本発明の実施形態について説明したが、実施形態における記述内容は、本発明の好適な一例であり、これに限定されるものではない。
例えば、第1の実施形態及び第2の実施形態では、被験者のポジショニングが完了したと判定されたことを契機として、放射線画像撮影装置20のモードを省電力モードから放射線照射検出モードへ遷移させるが、当該放射線照射検出モードへ遷移した後も被験者が動いてしまいポジショニングをやり直すケースがある。そこで、放射線照射検出モードへの遷移後も、第1の実施形態であれば筐体1内部の気圧変動を検出、第2の実施形態であれば筐体1内部の気圧変動を検出又は筐体1の動き(振動)を検出した場合、放射線画像撮影装置20のモードを再度省電力モードに遷移させ、上述したポジショニング動作判定処理を実行するようにしても良い。
また、第1の実施形態及び第2の実施形態では、筐体1内部の気圧変動や筐体1の動き(振動)に基づいて、被験者のポジショニングが完了したか否かを判定するようにしているが、例えば、ひずみゲージやひずみセンサー等を用いて筐体1のたわみ具合を検出することで、被験者のポジショニングが完了したか否かを判定するようにしても良い。
また、第2の実施形態では、自装置の動きを検出する手段として、放射線画像撮影装置20が3軸加速度センサーを備える構成について説明したが、この自装置の動きを検出する手段は、3軸加速度センサーに限定されるものではなく、例えば、地磁気センサー、ジャイロセンサー等の自装置の動きを検出可能なセンサーであっても良い。
また、第1の実施形態や第2の実施形態で説明した被験者のポジショニング完了の判定方法の他に、下記の方法を用いても良い。
具体的には、筐体1内部の気圧がピークに到達した後の気圧降下の傾きによって、被験者のポジショニングが完了したか否かを判定する際の閾値を設定する。例えば、図15(a)に示すように、筐体1内部の気圧がピークに到達した後の気圧降下の傾きが“a”である場合、放射線画像撮影装置20の制御部6は、閾値THaに設定する。また、制御部6は、筐体1内部の気圧がピークに到達した後の気圧降下の傾きが“b”である場合、閾値THbに設定する。また、制御部6は、筐体1内部の気圧がピークに到達した後の気圧降下の傾きが“c”である場合、閾値THcに設定する。そして、制御部6は、筐体1内部の気圧が設定された閾値を下回った場合に被験者のポジショニングが完了したと判定する。このような方法によれば、第2の実施形態のように3軸加速度センサーを用いなくても、筐体1の密閉度に影響することなく、すなわち放射線画像撮影装置20の使用状態に影響することなく、被験者のポジショニングが完了したか否かを判定することができるので、当該判定をより適切に行うことができる。
具体的には、筐体1内部の気圧がピークに到達した後の気圧降下の傾きによって、被験者のポジショニングが完了したか否かを判定する際の閾値を設定する。例えば、図15(a)に示すように、筐体1内部の気圧がピークに到達した後の気圧降下の傾きが“a”である場合、放射線画像撮影装置20の制御部6は、閾値THaに設定する。また、制御部6は、筐体1内部の気圧がピークに到達した後の気圧降下の傾きが“b”である場合、閾値THbに設定する。また、制御部6は、筐体1内部の気圧がピークに到達した後の気圧降下の傾きが“c”である場合、閾値THcに設定する。そして、制御部6は、筐体1内部の気圧が設定された閾値を下回った場合に被験者のポジショニングが完了したと判定する。このような方法によれば、第2の実施形態のように3軸加速度センサーを用いなくても、筐体1の密閉度に影響することなく、すなわち放射線画像撮影装置20の使用状態に影響することなく、被験者のポジショニングが完了したか否かを判定することができるので、当該判定をより適切に行うことができる。
図15(b)は、閾値設定テーブルTの一例を示す図である。
図15(b)に示すように、閾値設定テーブルTでは、各傾き(傾きa~傾きn)についてそれぞれ対応する閾値(閾値THa~閾値THn)が設けられている。この閾値設定テーブルTは、予め記憶部7に記憶しておき、放射線画像撮影装置20の制御部6は、筐体1内部の気圧が降下を開始した時点の傾きを算出した際に、この閾値設定テーブルTを用いて、算出された傾きに対応する閾値を決定する。
なお、第1の実施形態では、筐体1内部の気圧が測定開始時の気圧に戻ったと判定された場合、制御部6は、被験者のポジショニングが完了したと判定するようにしているが、例えば、筐体1内部の気圧が降下を開始した時点において算出される傾きから測定開始時の気圧に戻るまでの時間を算出し、算出された時間に到達したタイミングにおいて被験者のポジショニングが完了したと判定するようにしても良い。
図15(b)に示すように、閾値設定テーブルTでは、各傾き(傾きa~傾きn)についてそれぞれ対応する閾値(閾値THa~閾値THn)が設けられている。この閾値設定テーブルTは、予め記憶部7に記憶しておき、放射線画像撮影装置20の制御部6は、筐体1内部の気圧が降下を開始した時点の傾きを算出した際に、この閾値設定テーブルTを用いて、算出された傾きに対応する閾値を決定する。
なお、第1の実施形態では、筐体1内部の気圧が測定開始時の気圧に戻ったと判定された場合、制御部6は、被験者のポジショニングが完了したと判定するようにしているが、例えば、筐体1内部の気圧が降下を開始した時点において算出される傾きから測定開始時の気圧に戻るまでの時間を算出し、算出された時間に到達したタイミングにおいて被験者のポジショニングが完了したと判定するようにしても良い。
また、被験者のポジショニングが完了したか否かの判定方法として、上述した方法の他に、例えば、過去のポジショニングに関する実績データからポジショニング時間を推定し、ポジショニング開始タイミングから推定されたポジショニング時間が経過したら被験者のポジショニングが完了したと判定するようにしても良い。
ここで、実績データは、例えば、ポジショニングの対象部位、操作者、被験者、実際に要したポジショニング時間などの情報を使い、推定には当該実績データから機械学習などを用いて学習させた推論アルゴリズムを使用する。
この方法によれば、筐体1の変形(例えば、筐体1内部の気圧変動)を検出しなくても被験者のポジショニングが完了したか否かを判定することが可能となる。
ここで、実績データは、例えば、ポジショニングの対象部位、操作者、被験者、実際に要したポジショニング時間などの情報を使い、推定には当該実績データから機械学習などを用いて学習させた推論アルゴリズムを使用する。
この方法によれば、筐体1の変形(例えば、筐体1内部の気圧変動)を検出しなくても被験者のポジショニングが完了したか否かを判定することが可能となる。
また、第1の実施形態や第2の実施形態では、放射線画像撮影装置20がスピーカーや表示部などの報知手段を備え、被験者のポジショニングが完了したと判定されたことを契機として省電力モードから放射線照射検出モードに切り替えられた際に、当該切り替えがなされたことを、上記スピーカーを介して音声出力したり、上記表示部を介して文字出力するようにしても良い。また、上記切り替えがなされたことを音声出力したり文字出力する際に、例えば、「体を動かさないでください」等の注意事項を併せて音声出力したり文字出力するようにしても良い。
また、第1の実施形態や第2の実施形態では、放射線画像撮影装置20は、通信部8を介して、放射線照射装置10との間で通信可能な構成とし、被験者のポジショニングが完了したと判定された際に、通信部8を介して、当該ポジショニングの完了を放射線照射装置10に通知するようにしても良い。これにより、放射線画像撮影装置20が被験者のポジショニングの完了通知を放射線照射装置10に行うことによって、放射線照射装置10が放射線の照射を開始できるように制御することが可能となる。
その他、放射線画像撮影システムを構成する各装置の細部構成及び細部動作に関しても、本発明の趣旨を逸脱することのない範囲で適宜変更可能である。
10 放射線照射装置
20 放射線画像撮影装置
1筐体
2シンチレーター
3放射線検知部
4 走査駆動部
5 読み出し部
6 制御部
7 記憶部
8 通信部
9 内蔵電源
14 気圧センサー
SP センサーパネル
30 コンソール
40 中継器
60 回診車
20 放射線画像撮影装置
1筐体
2シンチレーター
3放射線検知部
4 走査駆動部
5 読み出し部
6 制御部
7 記憶部
8 通信部
9 内蔵電源
14 気圧センサー
SP センサーパネル
30 コンソール
40 中継器
60 回診車
Claims (10)
- 二次元状に配置された複数の放射線検出素子を備えるセンサーパネルと、
前記センサーパネルを収納する筐体と、
前記筐体の変形を検出する筐体変形検出手段と、
前記筐体変形検出手段によって検出された前記筐体の変形量から被験者のポジショニング又は撮影準備が完了したか否かを判定する判定手段と、
を備えることを特徴とする放射線画像撮影装置。 - 前記筐体変形検出手段として、前記筐体内部の気圧を測定する気圧測定手段を用い、
前記判定手段は、前記気圧測定手段によって測定される前記筐体内部の気圧の変動に基づいて、前記ポジショニング又は前記撮影準備が完了したか否かを判定する、
ことを特徴とする請求項1に記載の放射線画像撮影装置。 - 前記判定手段は、前記気圧測定手段によって測定された前記筐体内部の気圧が予め設定した閾値を超えた後、測定開始時の気圧に戻った場合に、前記ポジショニング又は前記撮影準備が完了したと判定する、
ことを特徴とする請求項2に記載の放射線画像撮影装置。 - 前記判定手段は、前記気圧測定手段によって測定された前記筐体内部の気圧が予め設定した第1の閾値を超えた後、当該第1の閾値とは異なる予め設定した第2の閾値を下回った場合に、前記ポジショニング又は前記撮影準備が完了したと判定する、
ことを特徴とする請求項2に記載の放射線画像撮影装置。 - 前記筐体の動きを検出する動き検出手段を備え、
前記判定手段は、前記気圧測定手段によって測定される前記筐体内部の気圧の変動と、前記動き検出手段によって検出される前記筐体の動きと、に基づいて、前記ポジショニング又は前記撮影準備が完了したか否かを判定する、
ことを特徴とする請求項2に記載の放射線画像撮影装置。 - 前記判定手段は、前記気圧測定手段によって測定された前記筐体内部の気圧が予め設定した閾値を超えた後、前記動き検出によって検出される前記筐体の動きが予め設定した範囲内に収まった場合に、前記ポジショニング又は前記撮影準備が完了したと判定する、
ことを特徴とする請求項5に記載の放射線画像撮影装置。 - 前記動き検出手段は、3軸加速度センサーである、
ことを特徴とする請求項5又は6に記載の放射線画像撮影装置。 - 前記センサーパネルに放射線が照射されたことを検出可能な照射検出モードと、当該照射検出モードでの消費電力よりも小さい消費電力で動作する省電力モードと、のいずれかにモードを切り替える切替手段を備え、
前記切替手段は、放射線画像の撮影開始時は前記省電力モードに切り替え、前記判定手段によって前記ポジショニング又は前記撮影準備が完了したと判定された場合に、前記省電力モードから前記照射検出モードに切り替える、
ことを特徴とする請求項1~7のいずれか一項に記載の放射線画像撮影装置。 - 前記切替手段によって前記省電力モードから前記照射検出モードに切り替えられたことを報知手段に報知させる報知制御手段を備える、
ことを特徴とする請求項8に記載の放射線画像撮影装置。 - 請求項1~9のいずれか一項に記載の放射線画像撮影装置と、
放射線を曝射する放射線照射装置と、
を備え、
前記放射線画像撮影装置は、前記判定手段によって前記ポジショニング又は前記撮影準備が完了したと判定された場合、当該完了を前記放射線照射装置に通知する通知手段を備え、
前記放射線照射装置は、前記放射線画像撮影装置から前記通知を受けた場合、放射線の曝射を開始する、
ことを特徴とする放射線画像撮影システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020111147A JP2022010513A (ja) | 2020-06-29 | 2020-06-29 | 放射線画像撮影装置及び放射線画像撮影システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020111147A JP2022010513A (ja) | 2020-06-29 | 2020-06-29 | 放射線画像撮影装置及び放射線画像撮影システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2022010513A true JP2022010513A (ja) | 2022-01-17 |
Family
ID=80147529
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020111147A Pending JP2022010513A (ja) | 2020-06-29 | 2020-06-29 | 放射線画像撮影装置及び放射線画像撮影システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2022010513A (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010502397A (ja) * | 2006-09-07 | 2010-01-28 | マグナコースティックス インコーポレイテッド | 医療画像システムにおけるスキャンの起動 |
| JP2014000196A (ja) * | 2012-06-18 | 2014-01-09 | Konica Minolta Inc | 放射線画像撮影システムおよび放射線画像撮影装置 |
| JP2015104638A (ja) * | 2013-12-02 | 2015-06-08 | キヤノン株式会社 | 放射線撮影装置、放射線撮影システム、放射線撮影装置の制御方法、制御装置、制御装置の動作方法およびプログラム |
| JP2016146513A (ja) * | 2013-10-02 | 2016-08-12 | コニカミノルタ株式会社 | 診断提供用医用画像システム |
-
2020
- 2020-06-29 JP JP2020111147A patent/JP2022010513A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010502397A (ja) * | 2006-09-07 | 2010-01-28 | マグナコースティックス インコーポレイテッド | 医療画像システムにおけるスキャンの起動 |
| JP2014000196A (ja) * | 2012-06-18 | 2014-01-09 | Konica Minolta Inc | 放射線画像撮影システムおよび放射線画像撮影装置 |
| JP2016146513A (ja) * | 2013-10-02 | 2016-08-12 | コニカミノルタ株式会社 | 診断提供用医用画像システム |
| JP2015104638A (ja) * | 2013-12-02 | 2015-06-08 | キヤノン株式会社 | 放射線撮影装置、放射線撮影システム、放射線撮影装置の制御方法、制御装置、制御装置の動作方法およびプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2317340B1 (en) | Radiation image detector | |
| US9001972B2 (en) | Radiation image detection apparatus and radiation image photographing system | |
| JP2009178377A (ja) | 放射線変換器及びそれを用いた放射線画像撮影システム | |
| JP2010212741A (ja) | 放射線画像検出装置 | |
| JP2010112866A (ja) | 可搬型放射線画像撮影装置および放射線画像撮影システム | |
| JP7003447B2 (ja) | 放射線画像撮影装置及び放射線画像撮影システム | |
| WO2006030594A1 (ja) | 放射線撮影システム | |
| JP6953708B2 (ja) | 放射線画像撮影装置及び放射線画像撮影システム | |
| JP5396814B2 (ja) | 放射線画像撮影システム | |
| JP2012100843A (ja) | 放射線画像撮影システム | |
| JP5247386B2 (ja) | 可搬型放射線画像撮影装置及び放射線画像撮影システム | |
| JP2017127444A (ja) | 放射線撮像システム、制御装置及びその制御方法、並びにプログラム | |
| JP2010071659A (ja) | 放射線固体検出器 | |
| US12268539B2 (en) | Radiation imaging apparatus, radiation imaging system, control apparatus, control method, and non-transitory computer-readable storage medium | |
| JP5428751B2 (ja) | 画像処理装置及び画像処理システム | |
| JP2010197679A (ja) | 放射線画像取得システム及び放射線画像検出カセッテ | |
| JP2022010513A (ja) | 放射線画像撮影装置及び放射線画像撮影システム | |
| US10973490B2 (en) | Radiation image photographing apparatus and radiation image photographing system for radiation image photographing process and dark image acquiring process | |
| JP5824899B2 (ja) | 撮影用電子機器および撮影システム | |
| JP2010022752A (ja) | 医用画像システム | |
| US10335110B2 (en) | Radiographic image capturing system and radiographic image capturing apparatus | |
| JP2014000196A (ja) | 放射線画像撮影システムおよび放射線画像撮影装置 | |
| JP6962124B2 (ja) | 画像撮影システム及び画像撮影装置 | |
| JP2013226332A (ja) | 放射線画像撮影装置 | |
| US20130187059A1 (en) | Radiation image capturing system and radiation image capturing apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230329 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231114 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20240507 |