JP2020508944A - 自動格納及び取得システム - Google Patents
自動格納及び取得システム Download PDFInfo
- Publication number
- JP2020508944A JP2020508944A JP2019546017A JP2019546017A JP2020508944A JP 2020508944 A JP2020508944 A JP 2020508944A JP 2019546017 A JP2019546017 A JP 2019546017A JP 2019546017 A JP2019546017 A JP 2019546017A JP 2020508944 A JP2020508944 A JP 2020508944A
- Authority
- JP
- Japan
- Prior art keywords
- storage container
- storage
- connector
- vehicle
- container
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0492—Storage devices mechanical with cars adapted to travel in storage aisles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0407—Storage devices mechanical using stacker cranes
- B65G1/0435—Storage devices mechanical using stacker cranes with pulling or pushing means on either stacking crane or stacking area
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
- B65G1/1373—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/10—Storage devices mechanical with relatively movable racks to facilitate insertion or removal of articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2814/00—Indexing codes relating to loading or unloading articles or bulk materials
- B65G2814/03—Loading or unloading means
- B65G2814/0347—Loading or unloading means for cars or linked car-trains with individual load-carriers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2814/00—Indexing codes relating to loading or unloading articles or bulk materials
- B65G2814/03—Loading or unloading means
- B65G2814/0347—Loading or unloading means for cars or linked car-trains with individual load-carriers
- B65G2814/0352—Feeding or discharging devices operated by cars
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Warehouses Or Storage Devices (AREA)
- Packages (AREA)
Abstract
Description
これにより、前述の各出願の開示全体を本明細書で引用により援用する。
数百又は数千の格納領域に対してアイテムを手動で仕分け及び取得するには、膨大な労力を要する。
多くの分野では、人件費を削減し、顧客注文の履行に必要な時間を減らして顧客サービスを向上させるために、自動採取が開発されている。
多くの場合、格納密度、アクセスしやすさ、フットプリント、コスト等のような、システムをセットアップする際の変数の間には、トレードオフが存在する。
たとえば、自動格納及び取得(ASR)システムの格納密度を向上させることで、このような自動格納及び取得システムのコスト及びスペース要件(フットプリント)の両方を削減可能である。
ただし、自動格納及び取得システムの格納密度が高すぎる場合、個々のアイテムを格納及び取得可能な容易さと速度とが低下し、自動格納及び取得システムが多くの用途に適さない場合がある。
このような自動格納及び取得システムは、両側に格納場所を備えた通路として構成され、車両が通路内の経路に沿って移動する。
自動格納及び取得システムの容量は、通路を高く又は長くすることで増やすことができる。
また、通路を追加してもよい。
しかし、多くの状況では、そのような自動格納及び取得システムをスペース上利用できない場合や、容量の増加という利点をコストが上回る場合がある。
したがって、一部の用途では、システムのスループットに大きな影響を与えることなく、低コスト、かつ、小さなフットプリントで格納密度を向上させるASRシステムが必要となっている。
本自動格納及び取得システムは、複数の格納場所又は目的地領域と、目的地領域へのアイテムの配送又は目的地領域からのアイテムの取得のための複数の運搬車両と、を含む。
運搬車両は、目的地領域への経路をたどる。
この自動格納及び取得システムでは、独立動作可能な車両が、格納コンテナを格納場所に配送し、かつ、格納場所から取得するよう動作可能であり、格納場所は、複数の格納コンテナを水平方向に前後配置で収容するのに充分な奥行きを有する。
この自動格納及び取得システムは、車両を軌道に沿って格納場所に案内する軌道を含んでもよい。
加えて、複数の格納場所が互いに垂直方向に隔てられるように、格納場所が配置されてもよい。
例えば、格納場所は、複数の行又は列状の格納場所の配列として構成されてもよい。
また、格納コンテナは、隣接する格納コンテナと解放可能に接続可能であってもよく、そうすることで、第1格納場所内の第1格納コンテナを移動させると、第1格納場所内で第2格納コンテナが移動する。
オプションで、本自動格納及び取得システムは、車両を案内する軌道を含む。
本システムは、複数の格納場所を含み、複数の格納場所は、互いに垂直方向に離れて配置されている。
格納場所は、軌道に沿って配置されてもよい。
本自動格納及び取得システムは、複数の格納コンテナも含む。
1つ以上の格納場所が、複数の格納コンテナを収容するよう構成されている。
格納コンテナは、格納場所内で互いに隣接して格納される複数の格納コンテナを接続する、相互接続のためのコネクタを含む。
コネクタが複数の格納コンテナを接続することで、格納場所にある格納コンテナの1つを移動させると、同じ格納場所にある相互接続された格納コンテナが露わになる。
車両は、車両と格納場所との間で格納コンテナを輸送するように構成された輸送機構を含んでもよい。
輸送機構は、第1コンテナ又は第2格納コンテナが車両に対して移動する際、相互接続された第1コンテナ及び第2格納コンテナを移動するよう動作可能であってもよい。
また、本軌道システムは、互いに離れて配置された複数の全般的に垂直な軌道区画を含んでもよい。
垂直及び水平な軌道区画を相互接続して、環状軌道を形成してもよい。
これらのコネクタによって、第2格納コンテナに対する第1格納コンテナの水平方向の移動を阻止する接続を提供可能である。
第1コネクタと第2コネクタとの接続が、水平移動の間の前記第2格納コンテナの重量を支持するのに充分であってもよく、それにより、第1コネクタと第2コネクタとが接続されている際に、第1格納コンテナを水平に移動させると、第2格納コンテナが水平に移動する。
さらに、第1コネクタと第2コネクタとの接続は、第2格納コンテナに対する第1格納コンテナの垂直方向の移動を許容してもよい。
オプションで、運搬車両が第1格納コンテナに倣う際、第1格納コンテナが第2格納コンテナを運搬車両から隔てるように、この格納場所が構成されてもよい。
オプションで、格納場所は、それぞれ奥行きを有し、格納コンテナのうちの第1格納コンテナ及び第2格納コンテナは、それぞれ長さを有し、格納場所の奥行きは、第1格納コンテナと第2格納コンテナとの合計長さと少なくとも同じ長さを有する。
車両は、格納コンテナを採取所に配送し、動作者が採取所で格納コンテナからアイテムを取得可能である。
車両は、軌道に係合する駆動車輪を備えてもよく、格納場所の格納ラックは、格納コンテナが軌道を越えて通路内に水平に突出するように、軌道に対して位置してもよい。
格納コンテナは、複数の壁と第1コネクタと第2コネクタとを含む。
第1コネクタと第2コネクタとは、2つの格納コンテナの間で解放可能な接続を形成して接続ができるように構成されている。
格納コンテナは、材料取扱いシステムの輸送機構と協働して格納コンテナを水平に移動させるよう構成されている、係合要素を含んでもよい。
さらに、材料取り扱いシステムは、格納場所を含んでもよく、格納コンテナの長さは、格納場所の奥行きの半分以下であってもよい。
これにより、2つの格納コンテナが共に接続されている際、2つの格納コンテナが格納場所内に収まる。
また、第1コネクタと第2コネクタとは、解放可能な接続を形成するよう接続可能であってもよい。
2つの格納コンテナは、同様に構成されてもよく、第1格納コンテナの第1コネクタが第2格納コンテナの第2コネクタと接続可能であることで2つの格納コンテナを接続し、運搬車両の輸送機構によって第1格納コンテナを水平方向に移動させることで、第2格納コンテナを移動させる。
オプションで、第1格納コンテナの第1コネクタと第2格納コンテナの第2コネクタとの接続によって、第2格納コンテナに対する第1格納コンテナの水平方向の移動が阻止される。
本方法は、複数の格納場所の間の移送経路に沿って、第1格納コンテナを有する第1車両を駆動するステップを含む。
第1格納コンテナは、第1車両から第1格納場所に積み下ろされる。
第1格納コンテナは、第1格納場所内で第2格納コンテナと解放可能に接続される。
そして、積み下ろすステップの後、第1車両を第1格納場所から移動させる。
オプションで、解放可能に接続するステップが、第1格納コンテナを第2格納コンテナに対して垂直方向に移動させるステップを含む。
積み下ろすステップは、第1格納コンテナを第2格納コンテナに向かって押すことで第2格納コンテナを格納場所のより奥に動かす、第1格納コンテナを第2格納コンテナに向かって押すステップを含む。
積み下ろすステップは、第1車両上の積み下ろし機構を動作することで第1格納コンテナを第1車両の外へと動かす、第1車両上の積み下ろし機構を動作するステップを含んでもよい。
材料取り扱い装置10は、第1の場所と第2の場所との間の移送経路に沿ってアイテムを移送する複数の車両200を含む。
第1の場所は、1つ以上の格納ラック内の複数の格納場所50の中から選択可能な格納場所であり、第2の場所は、アイテムを採取、仕分け及び/又は格納コンテナ80のような格納用の容器に輸送する、採取所である物品輸送所300である。
材料取り扱い装置10は、アイテム(又は、アイテムを収容する格納コンテナ)を運搬経路に沿って移動させる。
格納ラック35、格納ラック40は、複数の格納コンテナ80を格納するよう構成されている。
例えば、図1に示すように、通路20は、車両200が1つ以上の経路に沿って通路20内を移動するように、一対の格納ラック35、格納ラック40の間に形成された細長い通路であってもよい。
軌道110は、車両200が格納ラック内の格納場所に移動するための1つ以上の経路を、通路20内に提供してもよい。
例えば、実施形態は、通路20の片側の前方の格納ラック35に隣接する前方軌道115を含んでもよい。
後方の格納ラック40に隣接する後方軌道120を前方軌道115から間隔を空けて配置することで、通路20を形成してもよい。
車両200は、軌道110に沿って通路20内を移動してもよい。
例えば、車両200は、前方軌道115と係合する1つ以上の前方車輪と、後方軌道120と係合する1つ以上の後方車輪と、によって支持されてもよい。
車両200は、軌道110に沿って格納場所50に移動する。
格納場所50では、車両200は、車両200から格納場所50の1つにアイテムを輸送可能である。
同様に、車両200は、格納場所50の1つから車両200上にアイテムを輸送可能である。
さらに、車両200がこの車両200から格納場所50にアイテムを輸送すると同時に、異なる格納場所50から車両200上にアイテムを輸送するように構成されてもよい。
格納場所50は、通路20に隣接する場所の配列として配置されてもよい。
加えて、以下でさらに説明するように、格納ラック35、格納ラック40は、これらの格納ラック内の格納コンテナ80の格納密度を向上させるために、格納コンテナ80を2つ以上の奥行きで格納可能なように格納奥行きを提供してもよい。
<格納ラック>
図1を参照すると、システムは、1つ又は複数の格納ラック35、格納ラック40を含んでもよい。
格納ラック35と格納ラック40とは、アイテムを受け取るための目的地領域又は格納場所50の配列を提供してもよい。
格納場所50は、列状に配置されてもよいが、格納場所50は、(行状のように)様々な構成の任意の形態で配置されてもよい。
システムは、アイテムの格納領域50への配送及び/又は格納領域50からの取得を行う。
アイテムは、個々のアイテムが格納場所50に格納されるように構成されてもよい。
ただし、一般的な動作環境では、アイテムは、格納コンテナやプラットフォームなどの格納機構に格納される。
格納場所50は、様々な構成のうちの任意のものであってもよい。
たとえば、最も単純な構成は、アイテム又はアイテムを保持する格納コンテナ80を支持するための棚である。
同様に、格納場所50は、格納機構と協働することで、格納場所50で格納機構を支持する、1つ以上のブラケットを含んでもよい。
本例では、軌道110は、垂直支持梁及び水平支持梁の一部を形成してもよい。
例えば、格納ラック35は、コラムの配列を備えていてもよい。
ここで、各コラムは、複数の支持体によって形成されている。
各コラムは、2つの前方の垂直支持梁と2つの後方の垂直支持梁によって定義されてもよい。
図11に示されるように、前方の垂直支持梁からなる垂直支持体130は、軌道110の垂直区画を備えてもよい。
各コラムは、複数の格納場所50を含んでもよい。
具体的には、各コラムは、複数の格納領域又はセル50に分けられる。
各セル50は、格納コンテナ80をセルに格納できるように格納コンテナ80を支持する支持要素を含む。
支持要素は、格納場所50で格納コンテナ80を支持するための様々な要素のうちの任意のものであってもよい。
たとえば、各格納場所50には、格納コンテナ80を置くことができる、棚又は他の水平支持体が含まれてもよい。
例えば、図8及び図11、図12に示すように、格納ラック35は、垂直支持体130に取り付けられたLチャネル52などの複数のブラケットを含んでもよい。
このLチャネル52からなるブラケットは、各格納場所50の奥まで実質的に延在してもよい。
このようにして、各格納場所50は、隣接する複数の垂直支持体130の間で延在し、一対の水平支持要素52に隣接する位置から、一対の上方の水平支持体に隣接する位置又は格納ラックの上部に隣接する位置まで、上方に延在する領域として定義されてもよい。
言い換えると、格納コンテナ80は、(通路20に対して)格納コンテナ80の内側端部が通路20内に超えて出るように、格納場所50に格納されてもよい。
例えば、1つ以上の格納場所50が、格納コンテナ80の少なくとも約2倍の奥行きを有し、2つの格納コンテナ80を格納することができ、一方の格納コンテナ80は、他方の格納コンテナ80の後ろに格納される。
格納場所50は、任意の数の格納コンテナ80を収容するように構成されてもよい。
例えば、格納ラック35、格納ラック40は、1つ以上の格納場所50が3つの格納コンテナ80を収容できるように構成されてもよく、その結果、格納コンテナ80は、3層の奥行きで配置される。
そのような実施形態では、格納場所50は、格納コンテナ80の長さの約3倍の奥行きがある。
同様に、格納ラックの奥行きを、格納コンテナ80の長さの約「n」倍と増大させると、奥行き「n」に格納される「n」個の格納コンテナ80を収容することができる。
ここで、「n」は、整数である。
ここでは、「n」=2である。
材料取り扱い装置10は、片側に1つの格納ラックのみを含んでいてもよいが、図9では、2つの格納ラック、つまり、前方の格納ラック35と後方の格納ラック40とを有する。
さらに、前方の格納ラック35と後方の格納ラック40は、格納コンテナ80を2層の奥行き配置で収容するように構成されている。
ただし、格納ラック35、格納ラック40を、同じ数の格納コンテナ80を収容するように構成する必要はない。
例えば、前方の格納ラック35は、奥行き2基の格納ラックとして構成されてもよく、後方の格納ラック40は、奥行き1基の格納ラックとして構成されてもよい。
各格納場所50は、内側の格納場所55及び外側の格納場所57を含む。
内側の格納場所55及び外側の格納場所57のそれぞれは、格納コンテナ80を収容するように構成される。
内側の格納場所55は、通路20に隣接している。
外側の格納場所57は、内側の格納場所55の後方にあり、したがって、内側の格納場所55は、外側の格納場所57を通路20及び車両200から隔てている。
本例では、内側の格納場所55は、格納コンテナ80の長さとほぼ同じ奥行きを有している。
同様に、外側の格納場所57は、格納コンテナ80の長さとほぼ同じ奥行きを有している。
外側の格納場所57は、内側の格納場所55によって通路20から隔てられているため、遠隔の格納場所とみなす。
奥行きが2基を超えるシステムでは、遠隔場所には、内側の格納場所55と1つ以上の外側の格納場所57によって通路20から隔てられた格納場所が含まれる。
特に、車両200は、アイテムを格納場所50に輸送するか、又は、格納場所50からアイテムを引き出すための積み込み/積み下ろし機構210を含んでもよい。
格納コンテナ80が2つ基以上の奥行きに格納される実施形態では、車両200が遠隔の格納場所57の1つに格納された格納コンテナ80を取得することができるように構成される。
たとえば、各車両200は、遠隔の格納場所57に外向きに伸びて遠隔の格納場所57の格納コンテナ80に係合し、格納コンテナ80を内側の格納場所55に移動する、かつ/又は、格納コンテナ80を遠隔の格納場所57から車両200に積み込む、積み込み要素を含んでもよい。
あるいは、別の機構を利用して、格納コンテナ80を遠隔の格納場所57から内側の格納場所55に移動してもよい。
例えば、格納ラックが、遠隔の格納場所57から通路20に向かって格納コンテナ80を駆動するように動作可能な駆動機構を含んでもよい。
駆動機構は、別個に動力を供給されてもよいし、車両200の1つの駆動機構と相互作用してもよい。
さらに別の代替案は、格納コンテナ80の一方を移動すると両方の格納コンテナ80が移動するように、遠隔の格納場所57内の格納コンテナ80をこれと隣接する格納コンテナ80と相互接続することである。
例えば、遠隔の格納場所57内の格納コンテナ80は、内側の格納場所55内の格納コンテナ80と解放可能に接続されてもよい。
内側の格納場所55内の格納コンテナ80が通路20に向かって移動すると、遠隔の格納場所57内の格納コンテナ80は、内側の格納場所55に向かって移動する。
具体的には、格納コンテナ80は、1つ以上の隣接する格納コンテナ80と解放可能に接続するように構成される。
例えば、図13に示すように、解放可能なコネクタ90が、2つの隣接する格納コンテナ80A、格納コンテナ80Bを接続する。
解放可能なコネクタ90は、2つの格納コンテナ80A、80Bを選択的に接続する。
このようにすることで、格納コンテナ80Aを水平方向に移動させると、格納コンテナ80Bも移動する。
加えて、解放可能なコネクタ90は、1つの方向の相対運動を阻止する一方で、第2の方向又は横方向の相対運動を可能にしてもよい。
例えば、接続部は、一方の格納コンテナ80が水平方向に移動することで、他方の格納コンテナ80も移動するように、格納コンテナ80Aと格納コンテナ80Bを接続してもよい。
同時に、一方の格納コンテナを他方の格納コンテナに対して垂直に移動できるように、解放可能なコネクタ90を構成してもよい。
図11及び図13から図14に示す実施形態では、解放可能なコネクタ90は、以下でさらに説明するように、2つの隣接する格納コンテナ80A、80Bを接続又は切り離すための相対的な垂直移動を可能にするように構成される。
格納コンテナ80は、蓋のないカートン又は箱のようなものであってもよく、動作者は、採取所で格納コンテナ80に容易に手を伸ばしてアイテムを取得できる。
本システムは、格納コンテナ80を使用するものとして説明されるが、パレットや類似のプラットフォームなど、さまざまな格納機構の任意のものを使用できることを理解する必要がある。
したがって、以下の説明では、格納コンテナ80という用語は、パレット、プラットフォーム、トレイ、カートン、ボックス、容器又は同様の構造を含むがこれらに限定されない、アイテムを格納及び/又は支持することを目的とするアイテムを含むことが意図される。
底部83は、実質的に水平であり、アイテムを取得するためのプラットフォームを形成する。
格納コンテナ80は、底部83から上方に延在する複数のほぼ垂直な壁も含んでいてもよい。
例えば、格納コンテナ80は、ほぼ平行な複数の側壁82を含んでもよい。
格納コンテナは、底部83から上方に突出する前壁84を含んでもよい。
前面は、側壁82を接続するために複数の側壁82の間を延在していてもよい。
さらに、格納コンテナ80は、底部83から上方に突出する後壁86を含んでもよい。
後壁86は、前壁84とほぼ平行であってもよい。
後壁86は、複数の側壁82の間を延在し、側壁82を接続してもよい。
したがって、格納コンテナ80の壁(82、83、84、86)は、アイテムを格納可能な内部空間を定義する。
例えば、格納コンテナ80は、車両200と協働するよう構成されるフックや、戻り止めや、ソケットや、他の物理的構造を含んでもよい。
本例では、格納コンテナ80は、車両200の積み込み/積み下ろし要素212と協働するように構成される、保持スロット又は保持溝88を含んでもよい。
保持溝88は、格納コンテナ80の下側で、底部83のよりも下に形成されてもよい。
保持溝88は、図11及び図13に示されるように、格納コンテナ80の前面84の後方に位置していてもよい。
保持溝88は、格納コンテナ80の幅全体に広がるよう延在してもよい。
また、溝88は、図11及び図13に示されるように、保持溝88が貫通溝となるように、両側壁82に開放端部を有してもよい。
図13に示されるように、保持溝88は、車両200の積み込み/積み下ろし要素212の厚さよりも深くてもよく、積み込み/積み下ろし要素212が水平方向に移動する際、積み込み/積み下ろし要素212は、保持溝88B内に入れ子状に留まり、格納コンテナ80を内側又は外側に駆動してもよい。
また、格納コンテナ80は、後壁86の近くに第2の溝又はスロットからなる保持溝88を含んでもよい。
第2の保持溝88は、第1の壁と実質的に同様に構成されてもよく、後壁86の近傍で、後壁86の前方に位置して形成されていてもよい。
コネクタ90を用いることで、遠隔の格納場所57から内側の格納場所55への格納コンテナ80の移動を容易にすることができる。
解放可能なコネクタ90は、協働するフック又はラッチであってもよい。
例えば、解放可能なコネクタ90は、一対の協働可能な前方コネクタ92B、後方コネクタ96Aから形成されてもよい。
前方コネクタ92Bは、格納コンテナ80の前方端部84と接続されていてもよく、後方コネクタ96Aは、格納コンテナ80の後方端部86と接続されていてもよい。
このように、第1格納コンテナ80Bの前方コネクタ92Bは、第2格納コンテナ80Aの後方コネクタ96Aに解放可能に接続可能であることで、2つの格納コンテナ80A、80Bを接続する。
前方コネクタ92Bは、ほぼ垂直に下向きに延びる舌状のフックである(図14の92Bを参照)。
前方コネクタ92Bは、格納コンテナ80の前方端部84に隣接する凹部から下方に突出している。
この例では、前方コネクタ92Bは、L字型ブラケットである。
L字型ブラケットは、格納コンテナ80の底部83にしっかりと固定接続された本体部分を有してもよい。
例えば、前方コネクタ92Bの本体部分は、実質的に水平に延びていてもよく、コネクタ92を通って格納コンテナ80内に延びる留め具によって格納コンテナ80に固定されてもよい。
前方コネクタ92Bの舌部94は、舌部が下方に突出することで第2コネクタ96と係合する垂直フック又はフランジを形成するように、本体部分を横切って突出してもよい。
図13に示すように、前方コネクタ92Bは、保持溝88の前方で、格納コンテナ80に接続されてもよい。
保持溝88は、車両200の積み込み/積み下ろし機構212と係合するために使用される。
後方コネクタ96は、格納コンテナ80の後方端部86から後方に突出してもよい。
本例では、後方コネクタからなる第2コネクタ96は、垂直上向きに突出するフック又はフランジを組み込んでいる。
具体的には、第2コネクタ96は、第1コネクタ92の舌部94を受け入れるように構成される溝又はチャネル98を含んでもよい。
チャネル98は、このチャネル98が後方端部86から後方に突出するように格納コンテナ80の後方端部86に接続していてもよい。
第2コネクタ96は、格納コンテナ80の底部83にしっかりと固定接続された本体部分を有してもよい。
例えば、後方コネクタ96の本体部分は、実質的に水平に延在するほぼ平坦な部分であり、後方コネクタ96を通って格納コンテナ80内に延在する留め具によって格納コンテナ80に固定されてもよい。
以下でさらに説明するように、2つの格納コンテナ80A、80B間の接続により、格納コンテナ80の1つが移動した際にこれらの格納コンテナ80A、80Bが一緒に移動できるようになる。
このようにして、第1格納コンテナ80Bを内側の格納場所55から車両200上に引っ張ると、これに接続された格納コンテナ80Aが、遠隔の格納場所57から内側の格納場所55に向かって引っ張られる。
<軌道>
軌道110は、前方軌道115と後方軌道120とを含んでもよい。
前方軌道115及び後方軌道120は、軌道110に沿って車両200を案内する、互いに平行な軌道である。
図3に示すように、各車両200は、2つの前方車輪と2つの後方車輪の計4つの車輪220を含む。
前方車輪220は、前方軌道115に乗り、後方車輪220は、後方軌道120に乗る。
軌道110の説明で、前方軌道115及び後方軌道120は、車両200の前方車輪220及び後方車輪220を支持する、同様に構成された対向する軌道110であることを理解する必要がある。
よって、前方軌道115又は後方軌道120のいずれか一方の一部についての説明は、対向する前方軌道115又は後方軌道120にも当てはまる。
しかし、上述したように、図示の軌道110は、システムと共に使用可能な軌道にすぎない。
正確な構成は、用途に応じて様々であってもよく、上記のように、システム10は、軌道110を含んでいなくてもよい。
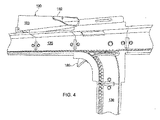
さらに、軌道110は、内壁154と外壁152との間に延在している後壁160を含んでもよい。
図7からわかるように、外壁152と内壁154と後壁160とは、チャネルを形成する。
車両200の車輪220は、このチャネルに乗る。
駆動面156は、車両200に積極的に係合して、車両200を軌道に沿って移動可能にする。
案内面158は、車両200を案内して、車両200と駆動面156との動作可能な係合を維持する。
本例では、駆動面156は、以下にさらに説明するように、車両200の車輪に係合するラックを形成する一連の歯で形成される。
案内面158は、ラック156に隣接する略平坦な面である。
ラック156は、軌道110の約半分に延在し、案内面158は、軌道110の残り半分に延在している。
図4から図7に示すように、ラック156は、軌道110の内壁154に形成されてもよい。
対向する外壁152は、内壁の案内面158に対して平行な略平坦な面であってもよい。
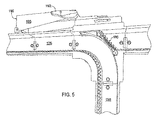
いずれかの垂直区画といずれかの水平区画とが交差する軌道110の各区画に、交差部170が形成されてもよい。
各交差部170は、湾曲した内側分岐172と、略直線の外側分岐176とを含んでもよい。
垂直区画が下方レールと交差する部分は、同様の交差部170を含んでいるが、これらの交差部170は、反転している。
ゲート180は、第1の位置と、第2の位置との間で枢動してもよい。
第1の位置では、ゲート180は、閉じられ、ゲート180の直線状の外側レース184が交差部170の直線状の外側分岐176と揃う。
第2の位置では、ゲート180が開き、ゲート180の湾曲した内側レース182が、交差部170の湾曲した分岐172と揃う。
この位置では、ゲート180は、車両200が湾曲部で下方に曲がるのを阻止し、よって、車両200は、交差部170を直進する。
これに対し、図5に示すように、ゲート180が開位置に枢動した場合、ゲート180は、車両200が交差部170を直進するのを阻止する。
代わりに、ゲート180の湾曲した内側レース182が、内側分岐172の湾曲面と揃い、車両200は、交差部170で曲がる。
言い換えると、ゲート180が閉じている場合、交差部170の位置に応じて、車両200は、上方レール135又は下方レール135のいずれかに沿って交差部170を直進する。
ゲート180が開いている場合、交差部170の位置に応じて、ゲート180は、車両200を、垂直レール130から水平レール135に、又は、水平レール135から垂直レール130に送る。
ただし、一部の用途では、システム10は、垂直コラムと交差する3つ以上の水平レール135を含んでもよい。
そのような構成では、車両200を複数の方向に曲がらせる異なるレールを含むことが望ましい場合がある。
たとえば、車両200がコラムを下方に移動している場合、ゲート180によって車両200を水平レール135に沿って左方向又は右方向に曲がらせるか、又は、垂直コラムに沿って直進させることが可能であってもよい。
加えて、一部の例では、車両200は、上方に移動してもよい。
実施形態では、システム10は、各車両200の位置を追跡し、各車両200に制御信号を提供して車両200の軌道110に沿った進行を制御する中央制御装置を使用する。
中央制御装置は、ゲート180など、軌道110に沿ったさまざまな要素の動作も制御してもよい。
あるいは、車両200が、ゲート180を動作してもよい。
図4から図5に示されるように、ゲート180は、車両200上のアクチュエータ230に応答する受動アクチュエータ190を含んでもよい。
車両200のアクチュエータがゲートアクチュエータ190に係合すると、ゲート180は、第1の位置から第2の位置に移動する。
例えば、図4に示すように、車両200を水平レール135に沿ったままにするために、ゲート180は、第1の位置をとる。
車両200のゲートアクチュエータ230が、ゲート180のアクチュエータ190に係合すると、ゲート180は、第2の位置に上向きに枢動し、車両200は、方向転換して垂直レール130に沿って下向きに移動する。
例えば、作動面192は、枢動可能なアーム193に取り付けられてもよい。
ゲート180を作動させて第1の位置から第2の位置に動かすために、車両200のゲートアクチュエータ230は、作動面192に接触する。
作動面192は、傾斜面の様に角度付き、車両200がゲート180に向かって前進すると、車両200のゲートアクチュエータが作動面192に係合し、アーム193を徐々に上方に移動させる。
アーム193は、リンケージによってゲート180に接続されてもよい。
したがって、アーム193が、枢動すると、ゲート180も枢動する。
このようにして、図4から図5に示すように、車両200のアクチュエータ230は、ゲート180上のアクチュエータと係合して、ゲート180を第1の位置から第2の位置に移動させる。
車両200が、図5に示すような開いたゲート180を通過した後、ゲート180は、図4に示す閉じた位置に戻ってもよい。
ゲート180は、付勢要素又はゲート180及び/もしくはアクチュエータの重量などにより、自動で閉じてもよい。
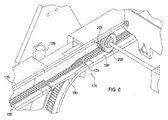
<運搬車両>
各運搬車両200は、車載電源を含む車載駆動システムを備えてもよい準自動型の車両である。
各車両200は、運搬用のアイテムの積み込み及び積み下ろしのための機構210も備えてもよい。
オプションで、各車両200は、ゲート180を選択的に作動させて車両200を選択的に方向転換させるゲートアクチュエータ230も備えてもよい。
加えて、積み込み/積み下ろし機構210は、特定の用途向けに特別に調整されてもよい。
積み込み/積み下ろし機構210は、格納場所に格納されたアイテムに係合し、アイテムを車両200に引き込むように構成された移動可能要素を含んでもよい。
本例では、車両200は、格納場所50の格納コンテナ80に向かって移動するように構成された移動可能要素を含む。
格納コンテナ80に係合した後、移動可能要素は、格納場所50から離れ、それによって、格納コンテナ80を車両200に引き込む。
バー212は、車両200の幅にまたがって延在し、車両200の側面に沿って延在している駆動チェーン214に両端が連結されていてもよい。
モーターが、駆動チェーン214を駆動して、この駆動チェーン214を格納場所50に向かう方向又は離れる方向に選択的に動かしてもよい。
たとえば、車両200が、格納場所に近づいて格納コンテナ80を取得する際、駆動チェーン214が、ロッドからなる積み込み/積み下ろし要素212を格納場所50に向けて駆動し、それによって、格納コンテナ80の底部83の溝又はノッチからなる保持溝88にバー212を係合させてもよい。
その後、駆動チェーン214は、反転し、それによって、バーからなる積み込み/積み下ろし要素212が格納場所50から移動する。
バーからなる積み込み/積み下ろし要素212は、格納コンテナ80のノッチ88に係合しているため、バー212が、格納場所50から離れるときに、バー212は、格納コンテナを車両200上に引っ張る。
これにより、積み込み/積み下ろし機構210は、アイテムを格納場所50から取得することができる。
同様に、アイテムを格納場所50に格納するには、積み込み/積み下ろし機構210の駆動チェーン214が、アイテムが格納場所50内に位置するまで、バー212を格納場所50に向けて駆動する。
その後、車両200は、下方に移動してバー212を格納コンテナ80から係合解除し、それによって、格納コンテナを解放してもよい。
あるいは、積み込み/積み下ろし機構210は、ノッチ88との係合を外して、バー212が下方に駆動されるように構成されてもよい。
詳細には、図3に示すように、積み込み/積み下ろし機構210は、相互に離間した2本のバー212を含む。
一方のバー212は、前方の配列の格納コンテナ80と係合可能な一方で、第2のバー212は、格納場所50の後方の配列の格納コンテナ80と係合可能である。
車輪220は、2つの車輪が車両200の前端に沿って設置され、2つの車輪が車両200の後端に沿って設置されるように、2本の平行に離間した軸215に取り付けられてもよい。
より詳細には、駆動モーターは、軸215に動作可能に連結されて軸を回転させ、それによって車輪220の歯車222を回転させてもよい。
車両200の駆動システムは、車両200を軌道110に沿って同期的に駆動するように構成されてもよい。
本例では、駆動システムは、各歯車222が同期的な態様で駆動されるように構成されている。
しかし、本例では、車両200は、駆動モーターと積み込み/積み下ろし機構210を駆動するモーターとの両方に必要な電力を提供する車載電源を備える。
さらに、本例では、電源は、再充電可能である。
電源は、再充電可能な電池等の電源を含んでもよいが、本例では、電源は、1つ又は複数のウルトラキャパシタで構成される。
ウルトラキャパシタは、きわめて高いアンペア数を受け入れて再充電できる。
高い電流を使用することで、ウルトラキャパシタを数秒以下等の極めて短い時間で再充電できる。
本例では、車両200は、外側に付勢されるようにばね加圧された銅ブラシ等の複数のブラシを含む。
ブラシは、充電レールと連動して、電源を再充電する。
この積み込みセンサを使用することで、アイテムが車両200に適切に配置されているかどうかを検出可能である。
たとえば、積み込みセンサは、重量の変化を検出する力検出器又はアイテムの存在を検出する赤外線センサを含んでもよい。
さらに、車両200は、車両200が軌道110に沿って移動する際に中央プロセッサと継続的に通信できるようにする無線トランシーバを含んでもよい。
あるいは、一部の用途では、軌道沿いに配置された複数のセンサ又は指示器を組み込むことが望ましい場合がある。
車両200は、センサ信号及び/又は指示器を感知する読み取り装置と、センサ又は指示器に応じて車両200の動作を制御する中央プロセッサとを含んでもよい。
<採取所と軌道>
ここで、図1から図2を参照して、採取所300をより詳細に説明する。
注文は、異なる部署での製造工程に必要な部品等の内部注文である場合や、顧客に対して履行及び出荷される顧客注文である場合がある。
いずれの場合も、システム10は、格納領域からアイテムを自動的に取得し、採取所300にアイテムを運んで、動作者が必要な数のアイテムを格納コンテナ80から採取できるようにする。
アイテムが格納コンテナ80から採取された後、車両200は前進し、注文に必要な次のアイテムを前進させる。
システム10は、この態様で動作を継続して、動作者が注文に必要なすべてのアイテムを採取できるようにする。
しかし、複数の採取所300を軌道110に沿って配置するのが望ましい場合がある。
たとえば、第2採取所300を、格納場所50の配列の他端に沿って配置することができる。
あるいは、複数の採取所300を一端に設けることもできる。
例えば、第2採取所300が、通路20の一端の第1採取所300の上に位置していてもよい。
図1から図2を参照すると、採取所300では、上方に湾曲して動作者から離間する湾曲区画315が軌道110に含まれている。
これにより、車両200は、上方に移動し、動作者が格納コンテナ80からアイテムを取り出しやすい高さで停止する。
動作者が格納コンテナ80からアイテムを取り出した後、車両200は、横方向で動作者から離れ、垂直方向で上方の水平レール135に向けて移動する。
たとえば、車両200が、採取所300に近づいたときに、制御装置で、前方の車輪220が停止した後も後方の車輪220が移動し続けるように車両200を制御できる。
これにより、(動作者の視点で)車両200の後端が持ち上がる。
動作者が、アイテムを格納コンテナ80から採取した後、(動作者に対して)前方の車輪220が、まず、移動して、車両200を水平にする。
水平になった後、4つの車輪220は、同期して駆動する。
よって、軌道110が、移動して格納コンテナを動作者の方へ傾けるように、軌道システムを改良してもよい。
格納場所50のコラムの端部で、軌道110は、システムの垂直コラムから外側に向けて湾曲し、採取所300の湾曲軌道315を形成する。
採取所300のこの軌道区画は、車両200の前方の軸215を支持及び案内する平行な前方軌道区画と、車両200の後方の軸215を支持及び案内する平行な後方軌道区画と、を含む。
前方軌道区画は、上方に垂直に延在し、次に湾曲して格納場所の垂直コラムに戻る。
後方軌道区画は、前方軌道区画と実質的に平行であり、前方軌道区画と実質的に同じように湾曲する。
これにより、前方軌道区画及び後方軌道区画は、車両200が湾曲軌道315に沿って移動するときに実質的に水平な向きを維持できるように車両200を案内する。
車両200の後方の軸を上昇させることで、車両200の格納コンテナ80が傾斜して、動作者の採取作業を容易にするように格納コンテナの中身が提示される。
たとえば、採取所300は、動作者を支援するために、情報を表示するモニタを備えてもよい。
車両200が採取所300に近づくときに、システム10は、注文に対して格納コンテナ80から取得する必要があるアイテムの数などの情報を表示してもよい。
加えて、動作者は複数の注文のアイテムを取得する場合があるため、システムは、各注文に対して取得する必要があるアイテムの数に加えて、取得するアイテムの対象の注文を表示してもよい。
さらに、システムは、動作者が適切な数のアイテムを格納コンテナから取得した後に格納コンテナに残っているべきアイテムの数などの情報もまた表示してもよい。
詳細には、車両200が水平に移動しているとき、前方の2つの歯付き車輪220は、前方軌道115の上方水平レール135又は下方水平レール140と連携し、後方の2つの歯付き車輪220は、後方軌道120の対応する上方レール135又は下方レール140と連携する。
車両200がゲートを通過してコラムに入ると、前方の2つの歯付き車輪220が、前方軌道115の一対の垂直区間130と係合し、後方の2つの歯付き車輪が、後方軌道120の対応する垂直区間と係合する。
なお、車両200の水平方向に対する向きが変化しないというのは、車両200が軌道110に沿って移動することを意味している。
車両200は、採取所300で水平方向に対して傾斜していても、軌道110に沿って移動する際は、水平方向に対して実質的に一定の向きを維持するといえる。
これにより、車両200が、軌道110を移動して水平移動と垂直移動とを移行するときに、歪んだり傾斜したりしない。
加えて、車両200を単一の軸と共に構成するのが望ましい場合がある。
そのような構成では、車両200は、上述した実質的に水平な向きではなく、実質的に垂直な向きになる。
単一軸の構成では、車両200の重量により、車両200の向きが維持される。
ただし、単一軸の車両200を使用する場合、格納場所50の向きは、車両200の垂直の向きに合わせて再構成される。
<動作>
具体的には、中央制御装置は、車両200の経路を決定し、アイテムの配送先の格納場所50に関する情報を車両200に伝えてもよい。
次に、中央制御装置は、車両200の動作を制御し、アイテムの配送先となる格納場所50に車両200を向かわせるために必要になる、軌道110に沿うゲート180を動作させる。
車両200が適切な格納場所50に到着すると、車両200は、格納場所50で停止し、格納コンテナ80は、適切な格納場所50に移動する。
例えば、車両200が適切な格納場所50で停止し、車両200上の車載コントローラが、バー212を前進させる駆動チェーン214を駆動する適切な信号を車両200に送ってもよい。
バー212は、格納コンテナ80のスロット88に係合するので、バー212は、格納コンテナ80を車両200から離れる方向に駆動し、適切な格納場所50へと駆動する。
アイテムを取得した後、車両200は、コラムの垂直区間130を下方に移動して下方レール140に到達してもよい。
ゲート180が、車両200を下方レール140に沿って送ってもよく、車両200は、下方レール140をたどって採取所300に戻って別のアイテムを配送してもよい。
同様に、別の格納コンテナ80に接続されていない格納コンテナ80を車両200が取得する場合にも、車両200は、上述のように動作する。
具体的には、車両200は、格納コンテナに隣接して停止する。
積み込み/積み下ろし機構210が前進して格納コンテナ80と係合した後、格納コンテナ80を車両200上に引き寄せる。
反対に、既に、格納コンテナ80を収容している格納場所50に置かれる格納コンテナ80を車両200が運ぶ場合、車両200の動作は、変更される。
同様に、車両200が遠隔の格納場所50の格納コンテナ80に接続されている格納コンテナ80を取得中である場合、車両200の動作は変更される。
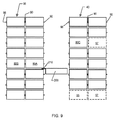
図9は、格納コンテナ80の2つの格納ラック35、格納ラック40が示されている実施形態を示す。
格納ラック35、40は、通路20によって互いに隔てられており、車両200は、格納ラック35、格納ラック40間の空間内を移動する。
図示の実施形態では、格納ラックは、2つの格納コンテナ80を格納するのに充分な奥行きを有する格納場所50を含む。
格納コンテナ80を収容する格納場所50の、通路20に隣接する部分を、この説明では、内側セルと呼び、55で示す。
内側セル55の背後の格納場所50の部分を、遠隔セルと呼び、57で示す。
遠隔セル内の格納コンテナ80Bの前方コネクタ92は、内側セル内の格納コンテナ80Aの後方コネクタ96と接続して、90で示される解放可能な接続を形成する。
格納コンテナ80A、格納コンテナ80Bは、コネクタ90などのコネクタによって互いに解放可能に接続されている。
格納コンテナ80Aと格納コンテナ80Bとは、水平方向から見て全般的に整列している。
車両200は、第1の格納コンテナ80Aを収容している格納場所50に隣接する位置で停止する。
車両200は、空である(すなわち、車両200には格納コンテナ80が搭載されていない)。
積み込み/積み下ろし機構210は、図9に示されるように、格納コンテナ80Aに係合する。
例えば、図11及び図12に示されるように、格納コンテナ80の前端部は、軌道(例えば、垂直軌道区間130)を越えて通路20内に延在してもよい。
具体的には、格納コンテナ80の輸送溝88は、通路20内に延在してもよい。
積み込みバー212は、積み込みバー212が輸送溝88に挿入されるまで、車両200のプラットフォームから離れて、格納コンテナ80に向かって外向きに延伸する。
内側セルの格納コンテナ80Aが車両200上に引っ張られると、格納コンテナ80Aは、遠隔セルの第2の格納コンテナ80Bを内側セルに向かって引っ張る。
具体的には、コネクタ90が、内側セルの格納コンテナ80Aと遠隔セルの格納コンテナ80Bとを接続しているので、格納コンテナは、共に水平に移動する。
格納コンテナ80Aが移動することで、遠隔の格納コンテナ80Bが内側セル内に引き込まれる。
その結果、格納ラック内で格納コンテナ80Aが占めていた場所を、格納コンテナ80Bが占めるようにする。
図10Bでは、格納コンテナ80Bを内側セルに引き込むことにより、格納コンテナ80Bの背後の遠隔セル57が空になっていることが分かる。
格納コンテナ80Aを車両200上に移動し続けると、2つの格納コンテナ80A、格納コンテナ80Bは、接続されたままであるため、格納コンテナ80Bを通路内に、場合によっては、車両200上に引き込む。
したがって、格納コンテナ80Bを新しい格納場所(すなわち内側セル)に移動すると、解放可能な接続90を切り離し、それにより、2つの格納コンテナ80A、格納コンテナ80Bが切り離される。
前述のように、コネクタ92、コネクタ96は、2つの格納コンテナ80A、80Bの間の解放可能な接続を提供するさまざまなコネクタのいずれでもよい。
コネクタは、機械式でも電気機械式でもよい。
例えば、コネクタ92、コネクタ96は、磁気素子であってもよく、その一方は、電磁石を含んでもよい。
電磁石は、消磁して格納コンテナ80A、80Bを切り離すことで、格納コンテナ80Bに対する格納コンテナ80Aの相対運動を容易にしてもよい。
あるいは、上述のように、コネクタ92、コネクタ96は、一対のフック又は舌部と溝部による構成などの機械的コネクタであってもよい。
したがって、格納コンテナ80A、格納コンテナ80Bを切り離すために、コネクタ92、コネクタ96の係合が解除される。
実施形態では、格納コンテナ80の1つを他の格納コンテナ80に対して垂直に変位させることにより、コネクタ92、コネクタ96の係合が解除される。
図13から図14に示されるように、コネクタ92Bの舌部94Bは、コネクタ96Aの溝98A内に下向きに突出してもよい。
したがって、図14に示すように、コネクタ92Bの舌部94Bが、溝98Aから外れるまで、車両200は、下方に移動して格納コンテナ80Aを垂直方向下方に移動させる。
このように、車両200を変位させると、格納コンテナ80Aが、格納コンテナ80Bから垂直方向に切り離される。
コネクタ92、コネクタ96は、車両200を下降させるのではなく、車両200を上方に移動させることによりコネクタを切り離すように、異なる構成が可能であることを理解されたい。
車両200が、コラム内で垂直方向に上下に移動するときに、格納コンテナ80が、格納ラック内の車両200のいずれにも干渉又は係合しないように、格納コンテナ80Aは、通路20内の中央にくるまで水平に移動する。
格納コンテナ80Aが、車両200に完全に搭載されると、車両200は、採取所300又は他の輸送場所に、又は、異なる格納場所に進んでもよい。
例えば、車両200は、下方水平レールまで下降し、次に水平レールに沿って移動することで、格納コンテナ80Aを採取所300に配送してもよい。
あるいは、格納コンテナ80Aを別の格納場所に移送し、その格納場所に積み下ろしてもよい。
車両200は、格納コンテナ80Cが格納されている格納ラック40の内側セルに隣接する位置に移動する。
格納コンテナ80Aは、車両200から格納コンテナ80Cに積み下ろされる。
格納コンテナ80Aが積み下ろされると、格納コンテナ80Aは、格納コンテナ80Cを格納ラック内の格納場所のより奥に押し込む。
そうすることにより、格納コンテナ80Cが内側セルから遠隔セル57に水平に移動する。
格納コンテナ80Aを下ろし、格納コンテナ80Cを移動させるプロセスの間、格納コンテナ80Aは、格納コンテナ80Cに接続される。
前述のように、2つの格納コンテナ80A、80Cのコネクタは、さまざまな方法で接続されてもよい。
本例では、格納コンテナ80A、80Cは、格納コンテナ80の一方を他方に対して移動することで接続される。
具体的には、格納コンテナ80Aが格納コンテナ80Cに対して垂直に変位することで、2つの格納コンテナ80A、80Cを接続する。
具体的には、格納コンテナ80Aの前方コネクタ92が格納コンテナ80Cの後方コネクタ96の上に位置するように、車両200は、格納コンテナ80に隣接する位置に駆動される。
次に、図10Fに示すように、格納コンテナ80Aを格納コンテナ80Cに向かって水平に移動させることで、車両200から格納コンテナ80を部分的に積み下ろす。
本例では、格納コンテナ80Aの前方コネクタ92が格納コンテナ80Cの後方コネクタ96に倣うまで、格納コンテナ80Aを移動する。
具体的には、車両200の積み下ろし機構210は、前方コネクタ92の舌部94が格納コンテナ80Cの後方コネクタ96の溝98に倣うまで、格納コンテナ80Aを水平方向に移動させる。
具体的には、図10Gを参照すると、車両200は、下方に移動することで、格納コンテナ80Aと格納コンテナ80Cとを水平方向に整列させ、2つの格納コンテナ80A、80Cを相互接続する。
格納コンテナ80Aが、格納場所と水平に整列すると、図10Hに示すように、格納コンテナ80Aは、車両200から格納場所に積み下ろされる。
例えば、本実施形態では、車両200の積み込み/積み下ろし機構210は、第1格納コンテナ80Aを車両200から動かし、第3格納コンテナ80Cが配置されていた内側セルに移動させる。
格納コンテナ80Aを内側セル内に移動させると、格納コンテナ80Aは、格納コンテナ80Cを格納場所の奥に押し込み、格納コンテナ80Cが(図10Gに57で示される)遠隔セル内に移動する。
そして、格納コンテナ80Aを格納ラックに積み下ろす前に、2つの格納コンテナ80A、80Cを接続する。
このようにして、その後、格納コンテナ80Aが取得される際、遠隔セル内の格納コンテナ80Cを通路20に向かって引っ張ることが可能になるように、格納コンテナ80A、80Cは、接続される(例えば、図10Aから図10D及び上記の説明を参照)。
しかしながら、格納コンテナ80Aを積み下ろして格納コンテナ80Cを遠隔セルに移動するために格納コンテナ80を接続する必要がないことを理解すべきである。
具体的には、格納コンテナ80Aが、格納コンテナ80Cを後方セルに後方に押し込むので、格納コンテナ80Aを積み下ろす前に格納コンテナ80を接続する必要はない。
したがって、前方コネクタ92と後方コネクタ96の構成によっては、第1格納コンテナ80Aが車両200から積み下ろされた後に、格納コンテナ80が互いに接続される場合がある。
複数奥行きの格納場所では、複数の格納コンテナ80が共通の水平格納場所で、前後に格納される。
共通の水平格納場所にある格納コンテナ80は、相互接続されてもよく、共通の格納場所にある格納コンテナ80の1つを取得すると、共通の格納場所にある他の格納コンテナ80が車両200に向かって前方に移動する。
上述の説明では、格納コンテナ80Aが運搬車両上に積み込まれ、それにより、格納コンテナ80を遠隔セルから内側セルに引き込むことで、その格納コンテナ80が内側セルから取得可能になる動作を説明した。
その後、車両200は、格納コンテナ80Aを別の格納場所に配送し、その後に戻って内側セルに移動した格納コンテナ80Bを取得可能である。
あるいは、特定の例では、(図9に示す格納コンテナ80A及び格納コンテナ80Bのような)2つの格納コンテナ80A、80Bを収容する格納場所は、その2つの格納コンテナ80と垂直及び水平に整列した空の格納場所の向かい側に位置してもよい。
そのような場合、格納コンテナ80Aは、車両200上に積み込まれ、それにより、格納コンテナ80Bを車両200に引っ張ってもよい。
上述のように、2つの格納コンテナ80を切り離すのではなく、格納コンテナ80Aをさらに水平方向に移動させて、格納コンテナ80を対向する格納ラックの格納場所に積み下ろす。
格納コンテナ80Aが、格納場所に積み下ろされると、格納コンテナ80Bが、車両200上に引っ張られる。
次に、車両200が、採取所又は別の格納場所に格納コンテナ80Bを配送できるように、格納コンテナ80Bを格納コンテナ80Aから切り離すことができる。
たとえば、車両200を垂直方向に移動して、格納コンテナ80Bを格納コンテナ80Aから切り離すことができる。
遠隔セル内の格納コンテナ80の前にある格納コンテナ80を最初に取得する車両200によって、複数奥行きの格納場所の遠隔の格納コンテナ80が取得されてもよい。
取得された格納コンテナ80は、その後、車両200によって移送される。
取得された格納コンテナ80は、次に別の場所に格納され、車両200が戻って来て遠隔セルにあった格納コンテナ80を取得可能であってもよい。
あるいは、第1車両が遠隔セル内の格納コンテナ80の前にある格納コンテナ80を取得し、第2車両が来て、遠隔セル内に位置していた格納コンテナ80を取得してもよい。
したがって、本発明は、本明細書に記載の実施形態に限定されず、特許請求の範囲に記載の内にあるすべての変更及び修正を含む。
Claims (30)
- アイテムを収容する複数の格納場所を定義する自動格納及び取得システムであって、
アイテムを配送及び取得する車両を駆動させる車載モーターを含む、複数の独立動作可能な車両と、
前記複数の独立動作可能な車両を案内する軌道と、
垂直方向に互いに離れて位置して前記軌道に沿って配置されていることで前記軌道が前記複数の独立動作可能な車両を該複数の格納場所に案内するように構成されている複数の格納場所と、
各格納場所が該複数の格納コンテナを収容するように構成される複数の格納コンテナと、を備え、
前記複数の格納コンテナの1つ目である第1格納コンテナが、第1端部に第1コネクタを含み、
前記複数の格納コンテナの2つ目である第2格納コンテナが、第2端部に第2コネクタを含み、
前記第2コネクタが前記第1コネクタに解放可能に接続されることで、前記複数の格納場所の1つで前記第1格納コンテナと前記第2格納コンテナとが解放可能に接続され、
各独立動作可能な車両が、該各独立動作可能な車両と前記複数の格納場所の一つとの間で前記第1格納コンテナと前記第2格納コンテナとを輸送する、輸送機構を含み、
前記輸送機構が前記第1格納コンテナを移動する際に、前記第1格納コンテナと前記第2格納コンテナとの間の前記解放可能な接続が、前記第2格納コンテナを移動するように動作可能である、自動格納及び取得システム。 - 前記軌道が、
互いに離れて配置されて全般的に水平方向に延在する複数の水平軌道区画と、
互いに離れて配置されて全般的に垂直方向に延在するとともに前記水平軌道区画と交差して環状経路を形成する複数の垂直軌道区画と、
前記水平軌道区画の1つが前記垂直軌道区画の1つと交差するとともに全般的に水平方向の第1経路と全般的に垂直方向の第2経路とを提供する交差部と、
を備えている、請求項1に記載の装置。 - 前記第1コネクタと前記第2コネクタとの接続が、前記第2格納コンテナに対する前記第1格納コンテナの水平方向の移動を阻止している、請求項1に記載の装置。
- 前記第1コネクタと前記第2コネクタとの接続が水平移動の間の前記第2格納コンテナの重量を支持するのに充分であることで前記第1コネクタと前記第2コネクタとが接続されている際に、前記第2格納コンテナが、前記第1格納コンテナを水平に移動することにより水平に移動されている、請求項3に記載の装置。
- 前記第1コネクタと前記第2コネクタとの接続が、前記第2格納コンテナに対する前記第1格納コンテナの垂直方向の移動を許容している、請求項3又は請求項4に記載の装置。
- 前記第1コネクタが、前記第1コネクタと前記第2コネクタとが前記第1コネクタが前記第2コネクタに対して垂直に移動することで、前記第2コネクタから切り離されるように構成されている、請求項3乃至請求項5のいずれかに記載の装置。
- 前記第1コネクタが、舌部を備え、
前記第2コネクタが、前記舌部を収容するように構成される溝部を備えている、請求項1乃至請求項6のいずれかに記載の装置。 - 前記第1格納コンテナと前記第2格納コンテナとが位置する前記複数の格納場所が、前記第1格納コンテナと前記第2格納コンテナとを水平方向に倣って収容するように構成され、
前記第1格納コンテナが、前記第2格納コンテナの前に配置されている、請求項1乃至請求項7のいずれかに記載の装置。 - 前記複数の独立動作可能な車両の1つが前記第1格納コンテナに倣う際、前記第1格納コンテナが、前記第2格納コンテナを前記複数の独立動作可能な車両の1つから隔てる、請求項8に記載の装置。
- 前記格納場所が、奥行きを有し、
前記第1格納コンテナ及び前記第2格納コンテナのそれぞれが、長さを有し、
前記複数の格納場所の奥行きが、前記第1格納コンテナと前記第2格納コンテナとの合計の長さと少なくとも同じ長さを有している、請求項1乃至請求項9のいずれかに記載の装置。 - 前記複数の独立動作可能な車両が、前記格納コンテナを収容するための全般的に平面のプラットフォームを含む、請求項1乃至請求項10のいずれかに記載の装置。
- 前記複数の格納場所が、格納場所の第2格納ラックから離れて位置している格納場所の第1格納ラックを備え、
前記第1格納ラックと前記第2格納ラックとの間に通路が、形成されている、請求項1乃至請求項11のいずれかに記載の装置。 - 採取所が、前記通路の端部に配置され、
前記複数の独立動作可能な車両が、格納コンテナを前記採取所に配送し、
動作者が、前記採取所で前記格納コンテナからアイテムを取得可能である、請求項12に記載の装置。 - 前記複数の独立動作可能な車両が、前記通路内で動作可能である、請求項12又は請求項13に記載の装置。
- 前記複数の独立動作可能な車両が、前記軌道に係合する駆動車輪を備え、
前記第1格納ラックと前記第2格納ラックとが、前記格納コンテナが前記軌道を越えて前記通路内に水平に突出するように前記軌道に対して位置している、請求項14に記載の装置。 - 前記格納コンテナが、前記複数の独立動作可能な車両の前記輸送機構と係合するように構成されている1つ以上の係合要素を含む、請求項1乃至請求項15のいずれかに記載の装置。
- 複数のアイテムを格納又は取得する材料取り扱いシステムであって、
アイテムを配送及び取得する各車両が該各車両を駆動させる車載モーターを含む複数の車両と、
格納場所の第1格納ラックと、
前記第1格納ラックから離れて位置するとともに前記第1格納ラックと該第2格納ラックとの間に通路を有して前記複数の車両が前記通路内を垂直方向と水平方向とに移動可能である格納場所の第2格納ラックと、
各格納場所が複数の格納コンテナを収容するように構成される複数の格納コンテナと、を備え、
前記複数の格納コンテナの1つ目である第1格納コンテナが、第1端部に第1コネクタを含み、
前記複数の格納コンテナの2つ目である第2格納コンテナが、第2端部に第2コネクタを含み、
前記第1コネクタが前記第2コネクタに解放可能に接続されることで、前記格納場所の1つで前記第1格納コンテナと前記第2格納コンテナとが解放可能に接続され、
各車両が、該各車両と前記複数の格納場所の一つとの間で前記第1格納コンテナと前記第2格納コンテナとを輸送する輸送機構を含み、前記輸送機構が前記第1格納コンテナを移動する際に、前記第1格納コンテナと前記第2格納コンテナとの間の前記解放可能な接続が、前記第2格納コンテナを移動するように動作可能である、材料取り扱いシステム。 - 前記複数の車両を案内する軌道を備え、
前記軌道が、
互いに離れて配置されて全般的に水平方向に延在する複数の水平軌道区画と、
互いに離れて配置されて全般的に垂直方向に延在するとともに前記水平軌道区画と交差して環状経路を形成する、複数の垂直軌道区画と、
前記水平軌道区画の1つが前記垂直軌道区画の1つと交差するとともに全般的に水平方向の第1経路と全般的に垂直方向の第2経路とを提供する交差部と、
を含む、請求項17に記載の装置。 - 前記第1コネクタと前記第2コネクタとの接続が、前記第2格納コンテナに対する前記第1格納コンテナの水平方向の移動を阻止している、請求項17又は請求項18に記載の装置。
- 前記第1コネクタと前記第2コネクタとの接続が水平移動の間の前記第2格納コンテナの重量を支持するのに充分であることで前記第1コネクタと前記第2コネクタとが接続されている際に、前記第1格納コンテナを水平に移動することにより、前記第2格納コンテナが水平に移動される、請求項19に記載の装置。
- 前記第1コネクタと前記第2コネクタとの接続が、前記第2格納コンテナに対する前記第1格納コンテナの垂直方向の移動を許容している、請求項19又は請求項20に記載の装置。
- 前記第1コネクタと前記第2コネクタとが、前記第1コネクタが前記第2コネクタに対して垂直に移動することで前記第1コネクタが前記第2コネクタから切り離されるように構成されている、請求項19乃至請求項21のいずれかに記載の装置。
- 前記第1コネクタが、舌部を備え、
前記第2コネクタが、前記舌部を収容するように構成される溝部を備えている、請求項17乃至請求項22のいずれかに記載の装置。 - 前記第1格納コンテナと前記第2格納コンテナとが位置する前記格納場所が、前記第1格納コンテナと前記第2格納コンテナとを水平方向に倣って収容するように構成され、
前記第1格納コンテナが、前記第2格納コンテナの前に配置されている、請求項17乃至請求項23のいずれかに記載の装置。 - 前記複数の車両の1つが前記第1格納コンテナに倣う際、前記第1格納コンテナが、前記第2格納コンテナを前記複数の車両の1つから隔てる、請求項24に記載の装置。
- 前記格納場所が、奥行きを有し、
前記第1格納コンテナ及び前記第2格納コンテナのそれぞれが、長さを有し、
前記複数の格納場所の奥行きが、前記第1格納コンテナと前記第2格納コンテナとの合計の長さと少なくとも同じ長さを有している、請求項17乃至請求項25のいずれかに記載の装置。 - 前記複数の車両が、前記格納コンテナを収容するための全般的に平面のプラットフォームを含む、請求項17乃至請求項26のいずれかに記載の装置。
- 採取所が、前記通路の端部に配置され、
前記複数の車両が、格納コンテナを前記採取所に配送し、
動作者が、前記採取所で前記格納コンテナからアイテムを取得可能である、請求項17乃至請求項27のいずれかに記載の装置。 - 前記複数の車両が、前記軌道に係合する駆動車輪を備え、
前記第1格納ラックと前記第2格納ラックとが、前記格納コンテナが前記軌道を越えて前記通路内に水平に突出するように前記軌道に対して位置している、請求項18に記載の装置。 - 前記格納コンテナが、前記複数の車両の前記輸送機構と係合するように構成されている1つ以上の係合要素を含む、請求項17乃至請求項29のいずれかに記載の装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022197321A JP2023025242A (ja) | 2017-02-24 | 2022-12-09 | 自動格納及び取得システム |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762463352P | 2017-02-24 | 2017-02-24 | |
| US62/463,352 | 2017-02-24 | ||
| US15/905,810 US10940998B2 (en) | 2017-02-24 | 2018-02-26 | Automated storage and retrieval system |
| US15/905,810 | 2018-02-26 | ||
| PCT/US2018/019791 WO2018157095A1 (en) | 2017-02-24 | 2018-02-26 | Automated storage and retrieval system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022197321A Division JP2023025242A (ja) | 2017-02-24 | 2022-12-09 | 自動格納及び取得システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020508944A true JP2020508944A (ja) | 2020-03-26 |
| JP2020508944A5 JP2020508944A5 (ja) | 2021-04-30 |
Family
ID=61627174
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019546017A Pending JP2020508944A (ja) | 2017-02-24 | 2018-02-26 | 自動格納及び取得システム |
| JP2022197321A Pending JP2023025242A (ja) | 2017-02-24 | 2022-12-09 | 自動格納及び取得システム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022197321A Pending JP2023025242A (ja) | 2017-02-24 | 2022-12-09 | 自動格納及び取得システム |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US10940998B2 (ja) |
| JP (2) | JP2020508944A (ja) |
| KR (1) | KR102563655B1 (ja) |
| AU (1) | AU2018224297B2 (ja) |
| CA (1) | CA3052302A1 (ja) |
| MX (3) | MX2019010119A (ja) |
| SG (1) | SG11201907621PA (ja) |
| WO (1) | WO2018157095A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BRPI0806564B1 (pt) * | 2007-01-12 | 2018-10-16 | Opex Corp | aparelho para classificar uma pluralidade de itens. |
| AU2018224297B2 (en) | 2017-02-24 | 2023-11-30 | Opex Corporation | Automated storage and retrieval system |
| KR102569785B1 (ko) | 2017-02-24 | 2023-08-22 | 오펙스 코포레이션 | 자동화된 저장 및 인출 시스템과 방법 |
| US20180330325A1 (en) | 2017-05-12 | 2018-11-15 | Zippy Inc. | Method for indicating delivery location and software for same |
| AT520965B1 (de) * | 2018-03-12 | 2019-12-15 | Knapp Ag | Regallager zum Lagern von Artikeln in Lagerplätzen von Regalen |
| US20200017299A1 (en) | 2018-07-12 | 2020-01-16 | Walmart Apollo, Llc | Automated storage retrieval system connection and communication protocol |
| CN110371600A (zh) * | 2018-08-30 | 2019-10-25 | 天津京东深拓机器人科技有限公司 | 货物输送系统及货物输送方法 |
| US20200226539A1 (en) * | 2018-12-06 | 2020-07-16 | Walmart Apollo, Llc | Systems and Methods for Object Storage and Retrieval |
| CN112024414B (zh) | 2019-06-03 | 2023-09-22 | 北京京东乾石科技有限公司 | 分拣机 |
| MX2023001911A (es) | 2020-08-14 | 2023-03-10 | Opex Corp | Aparatos para el manejo de materiales con estacion de trabajo separada y metodo de uso. |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006290594A (ja) * | 2005-04-13 | 2006-10-26 | Nippon Filing Co Ltd | コンテナ格納装置 |
| JP2015522492A (ja) * | 2012-04-09 | 2015-08-06 | オペックス コーポレーション | 品目を仕分けまたは取得する方法および装置 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3547282A (en) | 1967-04-24 | 1970-12-15 | Corwn Zellerback Corp | Apparatus for transient handling and storing of articles |
| DE2223561A1 (de) * | 1972-05-15 | 1974-01-17 | Aplitec Ltd | Automatisches lagersystem |
| DE3318015A1 (de) | 1983-05-18 | 1984-11-29 | Klaus 2070 Ahrensburg Engelking | Durchlauf-/einschublager fuer rollpaletten, gitterboxen und dergl. |
| JPS61150908A (ja) | 1984-12-21 | 1986-07-09 | Nippon Filing Co Ltd | 物品保管装置 |
| DE3805712A1 (de) | 1988-02-24 | 1989-09-07 | Pantzer Gerhard | Positioniervorrichtung fuer rollwagen eines rollwagenlagers |
| IT1318932B1 (it) | 2000-09-27 | 2003-09-19 | Fata Handling S P A | Magazzino a celle con movimentazione facilitata di unita' di carico. |
| US7991505B2 (en) * | 2003-08-29 | 2011-08-02 | Casepick Systems, Llc | Materials-handling system using autonomous transfer and transport vehicles |
| ITMO20040236A1 (it) | 2004-09-17 | 2004-12-17 | System Spa | Magazzino automatico. |
| DE102006049411A1 (de) | 2006-10-16 | 2008-04-17 | Psb Intralogistics Gmbh | Vorrichtung zum Transportieren von Behältern |
| BRPI0806564B1 (pt) | 2007-01-12 | 2018-10-16 | Opex Corp | aparelho para classificar uma pluralidade de itens. |
| ATE528235T1 (de) | 2007-10-29 | 2011-10-15 | Hen S R L | Automatisches lagerhaus |
| DE102008010060B4 (de) | 2008-02-20 | 2009-12-31 | Accurro Gmbh | Transportrahmen zum automatisierten Transport von Behältern (Vials) |
| DE102008064533A1 (de) | 2008-12-19 | 2010-07-01 | Viastore Systems Gmbh | Lastaufnahmevorrichtung für ein Regalbediengerät, Förderanlage mit einem Regalbediengerät und Verfahren zum Betreiben eines Regalbediengeräts |
| DE202010003476U1 (de) | 2010-01-28 | 2011-06-01 | Servus Robotics Gmbh | Regallager |
| DE102012107176A1 (de) | 2012-08-06 | 2014-02-06 | Dematic Accounting Services Gmbh | Verfahren zum Bereitstellen von Transporteinheiten aus einem Lager |
| SG11201509422SA (en) | 2013-05-17 | 2015-12-30 | fybr | Distributed remote sensing system gateway |
| JP6233032B2 (ja) | 2013-06-05 | 2017-11-22 | デクセリアルズ株式会社 | 光学活性化合物の製造方法 |
| EP2826730A1 (en) | 2013-07-17 | 2015-01-21 | Dematic Accounting Services GmbH | Method of order fulfilling by preparing storage units at a picking station |
| US9187245B2 (en) * | 2014-01-15 | 2015-11-17 | Sergey N. Razumov | Transferring containers in storage system |
| CN107635896B (zh) | 2015-04-21 | 2019-11-05 | 欧派克斯公司 | 物料处理系统 |
| CN107635891B (zh) | 2015-06-09 | 2021-06-04 | 盖特法布瑞克有限公司 | 机器人库存处理 |
| US9790001B2 (en) * | 2015-12-11 | 2017-10-17 | Amazon Technologies, Inc. | Storage totes |
| US10947036B2 (en) * | 2017-01-11 | 2021-03-16 | Biosphere Aerospace, Llc | Modular container transport systems |
| AU2018224297B2 (en) | 2017-02-24 | 2023-11-30 | Opex Corporation | Automated storage and retrieval system |
| KR102569785B1 (ko) | 2017-02-24 | 2023-08-22 | 오펙스 코포레이션 | 자동화된 저장 및 인출 시스템과 방법 |
-
2018
- 2018-02-26 AU AU2018224297A patent/AU2018224297B2/en active Active
- 2018-02-26 KR KR1020197027854A patent/KR102563655B1/ko active IP Right Grant
- 2018-02-26 US US15/905,810 patent/US10940998B2/en active Active
- 2018-02-26 MX MX2019010119A patent/MX2019010119A/es unknown
- 2018-02-26 SG SG11201907621PA patent/SG11201907621PA/en unknown
- 2018-02-26 JP JP2019546017A patent/JP2020508944A/ja active Pending
- 2018-02-26 WO PCT/US2018/019791 patent/WO2018157095A1/en unknown
- 2018-02-26 CA CA3052302A patent/CA3052302A1/en active Pending
-
2019
- 2019-08-23 MX MX2023003790A patent/MX2023003790A/es unknown
- 2019-08-23 MX MX2023003791A patent/MX2023003791A/es unknown
-
2021
- 2021-01-15 US US17/150,750 patent/US11820596B2/en active Active
-
2022
- 2022-12-09 JP JP2022197321A patent/JP2023025242A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006290594A (ja) * | 2005-04-13 | 2006-10-26 | Nippon Filing Co Ltd | コンテナ格納装置 |
| JP2015522492A (ja) * | 2012-04-09 | 2015-08-06 | オペックス コーポレーション | 品目を仕分けまたは取得する方法および装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20190116506A (ko) | 2019-10-14 |
| CA3052302A1 (en) | 2018-08-30 |
| US20180251302A1 (en) | 2018-09-06 |
| AU2018224297A1 (en) | 2019-08-22 |
| MX2023003790A (es) | 2023-04-26 |
| MX2023003791A (es) | 2023-04-26 |
| SG11201907621PA (en) | 2019-09-27 |
| WO2018157095A1 (en) | 2018-08-30 |
| US20210139241A1 (en) | 2021-05-13 |
| US11820596B2 (en) | 2023-11-21 |
| MX2019010119A (es) | 2019-10-14 |
| KR102563655B1 (ko) | 2023-08-03 |
| US10940998B2 (en) | 2021-03-09 |
| AU2018224297B2 (en) | 2023-11-30 |
| JP2023025242A (ja) | 2023-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11981510B2 (en) | Automated storage and retrieval system and methods | |
| JP2020508944A (ja) | 自動格納及び取得システム | |
| US10947044B2 (en) | Method and apparatus for storing or retrieving items | |
| CN110325462B (zh) | 自动存储和取回系统及用于操作该自动存储和取回系统的方法 | |
| CN113911612A (zh) | 自动存储和取回系统 | |
| NZ737239B2 (en) | Method and apparatus for storing or retrieving items |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210218 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210308 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211005 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20211227 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220302 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220328 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220816 |