JP2020052958A - 制御装置、及びその制御方法並びに制御プログラム、構造体 - Google Patents
制御装置、及びその制御方法並びに制御プログラム、構造体 Download PDFInfo
- Publication number
- JP2020052958A JP2020052958A JP2018184561A JP2018184561A JP2020052958A JP 2020052958 A JP2020052958 A JP 2020052958A JP 2018184561 A JP2018184561 A JP 2018184561A JP 2018184561 A JP2018184561 A JP 2018184561A JP 2020052958 A JP2020052958 A JP 2020052958A
- Authority
- JP
- Japan
- Prior art keywords
- control
- value
- linearization
- input
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Feedback Control In General (AREA)
Abstract
Description

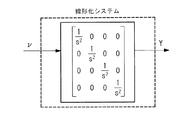
厳密な線形化手法は、制御対象の非線形特性を示した非線形モデルを用いて、近似を行うことなく、特性の全領域において線形化する手法である。すなわち、非線形な制御対象をそれと同等の精度を有する非線形モデル(非線形性を表現した数式)を用いて入出力間が線形となるように数学的な変換を行うものである。なお、線形化システム28では、厳密な線形化手法に限定されず様々な線形化手法を適用することが可能である。
20 :制御装置
21 :目標軌道生成部
22 :フィードバック制御部
23 :入力変換部
24 :線形化フィードバック部
25 :センサ部
26 :フィルタ部
28 :線形化システム
30 :制御対象
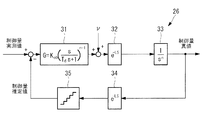
31 :調整部
32 :第1ディレイ
33 :演算部
34 :第2ディレイ
35 :量子化部
Claims (8)
- 非線形要素を備える制御対象を線形化システムに線形化して制御する制御装置であって、
前記制御対象の状態を示す制御量を量子化した値を検出するセンサ部と、
前記制御対象の状態が目標状態に近づくように前記線形化システムに入力される値と、前記線形化システムの数理モデルとに基づいて前記制御量の推定値を連続量として算出し、前記制御量の推定値を量子化した値と前記センサ部の出力との偏差に基づいて前記制御量の推定値を再帰的に補正するフィルタ部と、
前記フィルタ部から出力される前記制御量の推定値に基づいて、前記線形化システムに入力される値又はその変換値の補正を行う線形化フィードバック部と、
を備える制御装置。 - 前記フィルタ部の開ループ伝達関数は、前記フィルタ部の制御帯域付近において1次の積分特性とされる請求項1に記載の制御装置。
- 前記フィルタ部は、開ループ上に前記数理モデルの積分要素の次数から1を引いた次数の微分要素を持つ伝達関数を有する請求項1または2に記載の制御装置。
- 前記微分要素は、帯域制限付きの微分器である請求項3に記載の制御装置。
- 前記フィルタ部は、前記偏差に対して所定の定数を乗算した値を用いて前記入力される値を補正する請求項1から4のいずれか1項に記載の制御装置。
- 請求項1から5のいずれか1項に記載の制御装置を備えた構造体。
- 非線形要素を備える制御対象を線形化システムに線形化して制御する制御方法であって、
前記制御対象の状態を示す制御量を量子化した値を検出する検出工程と、
前記制御対象の状態が目標状態に近づくように前記線形化システムに入力される値と、前記線形化システムの数理モデルとに基づいて前記制御量の推定値を連続量として算出し、前記制御量の推定値を量子化した値と前記検出工程の出力との偏差に基づいて前記制御量の推定値を再帰的に補正するフィルタ工程と、
前記フィルタ工程にて出力される前記制御量の推定値に基づいて、前記線形化システムに入力される値又はその変換値の補正を行う線形化フィードバック工程と、
を有する制御方法。 - 非線形要素を備える制御対象を線形化システムに線形化して制御する制御プログラムであって、
前記制御対象の状態を示す制御量を量子化した値を検出する検出処理と、
前記制御対象の状態が目標状態に近づくように前記線形化システムに入力される値と、前記線形化システムの数理モデルとに基づいて前記制御量の推定値を連続量として算出し、前記制御量の推定値を量子化した値と前記検出処理の出力との偏差に基づいて前記制御量の推定値を再帰的に補正するフィルタ処理と、
前記フィルタ処理にて出力される前記制御量の推定値に基づいて、前記線形化システムに入力される値又はその変換値の補正を行う線形化フィードバック処理と、
をコンピュータに実行させるための制御プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018184561A JP7027291B2 (ja) | 2018-09-28 | 2018-09-28 | 制御装置、及びその制御方法並びに制御プログラム、構造体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018184561A JP7027291B2 (ja) | 2018-09-28 | 2018-09-28 | 制御装置、及びその制御方法並びに制御プログラム、構造体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020052958A true JP2020052958A (ja) | 2020-04-02 |
| JP7027291B2 JP7027291B2 (ja) | 2022-03-01 |
Family
ID=69997400
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018184561A Active JP7027291B2 (ja) | 2018-09-28 | 2018-09-28 | 制御装置、及びその制御方法並びに制御プログラム、構造体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7027291B2 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6054007A (ja) * | 1983-09-02 | 1985-03-28 | Toshiba Corp | オンライン制御モデルの補間装置 |
| JPH01234901A (ja) * | 1988-03-16 | 1989-09-20 | Toshiba Corp | プロセス制御装置 |
| JPH0391801A (ja) * | 1989-09-05 | 1991-04-17 | Toshiba Corp | 非線形動特性を有する対象の制御装置 |
| JP2015153232A (ja) * | 2014-02-17 | 2015-08-24 | 三菱重工業株式会社 | 制御装置 |
| JP2017208012A (ja) * | 2016-05-20 | 2017-11-24 | 三菱重工業株式会社 | 制御装置、水中航走体、制御方法およびプログラム |
-
2018
- 2018-09-28 JP JP2018184561A patent/JP7027291B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6054007A (ja) * | 1983-09-02 | 1985-03-28 | Toshiba Corp | オンライン制御モデルの補間装置 |
| JPH01234901A (ja) * | 1988-03-16 | 1989-09-20 | Toshiba Corp | プロセス制御装置 |
| JPH0391801A (ja) * | 1989-09-05 | 1991-04-17 | Toshiba Corp | 非線形動特性を有する対象の制御装置 |
| JP2015153232A (ja) * | 2014-02-17 | 2015-08-24 | 三菱重工業株式会社 | 制御装置 |
| JP2017208012A (ja) * | 2016-05-20 | 2017-11-24 | 三菱重工業株式会社 | 制御装置、水中航走体、制御方法およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7027291B2 (ja) | 2022-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110467111B (zh) | 桥式起重机的控制 | |
| US10852748B2 (en) | Methods and apparatus to perform observer-based control of a vehicle | |
| JP4575508B1 (ja) | デュアル位置フィードバック制御を行うサーボ制御装置 | |
| US8901871B2 (en) | Robust controller for electro-mechanical actuators employing sliding and second control modes | |
| US11669055B2 (en) | Vibration suppression device, method and computer-readable medium using estimated vibration torque | |
| KR102435901B1 (ko) | 모델예측제어기와 외란추정기를 사용한 자이로스코픽 구동기의 마찰력 방지/보상 방법 및 장치 | |
| JP2010033172A (ja) | フィードフォワード信号を用いたディジタルサーボ制御装置 | |
| CN111781938B (zh) | 欠驱动水下航行器及其镇定方法与装置 | |
| JP5319167B2 (ja) | 制御装置 | |
| KR19990063535A (ko) | 이동 물체의 상태 제어 장치 및 방법 | |
| JP7027291B2 (ja) | 制御装置、及びその制御方法並びに制御プログラム、構造体 | |
| Sawyer | Gain-scheduled control of a quadcopter UAV | |
| JP6189186B2 (ja) | 水中航走体及びその制御装置並びに制御方法 | |
| CN120122446A (zh) | 一种基于自适应时变优化控制的auv轨迹跟踪方法及系统 | |
| JP7114427B2 (ja) | 制御装置、及びその制御方法並びに制御プログラム、構造体 | |
| JP4922954B2 (ja) | 位置制御装置 | |
| JP6380951B2 (ja) | 航行体制御装置、航行体、航行体制御方法、プログラム | |
| JP4078396B2 (ja) | 位置決め制御装置 | |
| JPH0834396A (ja) | 船舶用自動操舵装置 | |
| JP2017151590A (ja) | アクチュエータの駆動制御方法およびアクチュエータの駆動制御装置 | |
| Mouchrif et al. | ADRC control of an unmanned Under-Actuated aerial vehicle | |
| Kodhanda et al. | Robust 3D Trajectory Tracking of an Under-Actuated Lighter-Than-Air | |
| WO2025057915A1 (ja) | 船舶用自動操舵装置 | |
| JP3600025B2 (ja) | 形状測定装置 | |
| CN121386858A (zh) | 一种无人装备姿态稳定与自适应航向控制方法和相关设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220118 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7027291 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |