JP2020052906A - 監視システム、監視装置、監視方法、及びプログラム - Google Patents
監視システム、監視装置、監視方法、及びプログラム Download PDFInfo
- Publication number
- JP2020052906A JP2020052906A JP2018183915A JP2018183915A JP2020052906A JP 2020052906 A JP2020052906 A JP 2020052906A JP 2018183915 A JP2018183915 A JP 2018183915A JP 2018183915 A JP2018183915 A JP 2018183915A JP 2020052906 A JP2020052906 A JP 2020052906A
- Authority
- JP
- Japan
- Prior art keywords
- monitoring
- auc
- self
- alarm
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Traffic Control Systems (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Closed-Circuit Television Systems (AREA)
- Alarm Systems (AREA)
Abstract
Description
対象機器を遠隔から監視するシステムに関して、コールセンター業務において、電話を受けた監視者と対象機器の障害アラームとを関連付ける技術が知られている(例えば、特許文献1参照)。
本発明は、上記問題を解決すべくなされたもので、その目的は、M人の監視者が、N台(M<N)の自動運転車両を監視する場合でも、監視精度を向上できる監視システム、監視装置、監視方法、及びプログラムを提供することにある。
(2)本発明の一態様は、上記(1)に記載の監視システムにおいて、前記通信部は、複数の前記自動運転車両の各々が送信する前記自動運転車両の位置情報を受信し、前記割当部は、前記通信部が受信した複数の前記位置情報の各々に基づいて、前記位置情報と、前記位置情報を送信した自動運転車両の目的地との関係を導出し、導出した前記関係に基づいて、複数の前記監視者の各々に監視させる自動運転車両を変更する。
(3)本発明の一態様は、上記(1)又は上記(2)に記載の監視システムにおいて、前記監視コスト導出部は、複数の前記自動運転車両の各々が走行する経路にさらに基づいて、前記監視コストを導出する。
(4)本発明の一態様は、上記(3)に記載の監視システムにおいて、前記経路に含まれる監視に注意を要する箇所である注意箇所を導出する注意箇所導出部を備え、前記監視コスト導出部は、前記注意箇所導出部が導出した前記注意箇所を示す情報にさらに基づいて、前記監視コストを導出する。
(5)本発明の一態様は、上記(1)から上記(4)のいずれか一項に記載の監視システムにおいて、前記割当部は、複数の前記自動運転車両の各々が走行する経路を、複数の前記監視者の各々が知っているか否かにさらに基づいて、複数の前記監視者の各々に監視させる自動運転車両を割り当てる。
(6)本発明の一態様は、上記(1)から上記(5)のいずれか一項に記載の監視システムにおいて、前記監視コスト導出部は、複数の前記自動運転車両の各々が送信したアラームが、複数の前記自動運転車両のいずれかの運転への介入を要する場合に、直ちに前記監視コストを再導出し、前記割当部は、前記監視コスト導出部が再導出した前記監視コストに基づいて、複数の監視者の各々に監視させる自動運転車両を割り当てる。
また、本願でいう「XXに基づく」とは、「少なくともXXに基づく」ことを意味し、XXに加えて別の要素に基づく場合も含む。また、「XXに基づく」とは、XXを直接に用いる場合に限定されず、XXに対して演算や加工が行われたものに基づく場合も含む。「XX」は、任意の要素(例えば、任意の情報)である。
(監視システム)
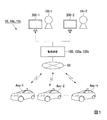
図1に示されるように、第1の実施形態の監視システム10は、監視装置100と、監視モニタ200−1と、監視モニタ200−2と、自動運転車両Auc−1〜自動運転車両Auc−n(nは、n>1の整数)とを備える。監視システム10は、遠隔型自動運転システムにおいて、自動運転車両Auc−1〜自動運転車両Auc−nを監視する。監視装置100と、監視モニタ200−1との間は、有線又は無線によって接続される。以下、監視装置100と、監視モニタ200−1との間が、有線で接続される場合について説明を続ける。監視装置100と、監視モニタ200−2との間は、有線又は無線によって接続される。以下、監視装置100と、監視モニタ200−2との間が、有線で接続される場合について説明を続ける。以下、監視モニタ200−1と、監視モニタ200−2とのうち、任意の監視モニタを、監視モニタ200と記載する。
監視装置100と、自動運転車両Auc−1〜自動運転車両Auc−n(nは、n>1の整数)との間は、インターネット、携帯電話網などのネットワーク50を介して、無線で接続される。以下、自動運転車両Auc−1〜自動運転車両Auc−nのうち、任意の自動運転車両を、自動運転車両Aucと記載する。
監視モニタ200−1は、監視装置100が送信する複数の自動運転車両の走行状況を監視するための情報(以下「走行状況監視情報」という)を処理することによって、表示する。監視モニタ200−2は、監視装置100が送信する複数の自動運転車両の走行状況監視情報を処理することによって、表示する。
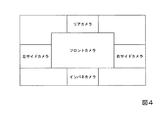
自動運転車両Aucは、車載装置と、撮像装置とを備えている。撮像装置は、自動運転車両Aucの周囲の風景を撮像する。車載装置は、撮像装置が撮像することによって得られる自動運転車両Aucの周囲の風景の映像情報を取得する。以下、自動運転車両Aucが、前方を撮像するフロントカメラと、後方を撮像するリアカメラと、右側を撮像する右サイドカメラと、左側を撮像する左サイドカメラと、インパネを撮像するインパネカメラとを備える場合について説明を続ける。車載装置は、取得した映像情報と、自動運転車両Aucの速度情報、加速度情報、先行車との間の距離などの走行制御情報とを含む走行情報を作成し、作成した走行情報を、監視装置100へ送信する。また、自動運転車両Aucは、所定の場合にアラームを送信する。
監視モニタ200−1は、監視装置100が送信した複数の自動運転車両Aucの各々の走行情報に含まれる映像情報と、走行制御情報とを処理することによって、複数の自動運転車両Aucの各々の映像情報と、走行制御情報とを表示する。監視モニタ200−2は、監視装置100が送信した複数の自動運転車両Aucの各々の走行情報に含まれる映像情報と、走行制御情報とを処理することによって、複数の自動運転車両Aucの各々の映像情報と、走行制御情報とを表示する。以下、監視システムを構成する監視装置100について、説明する。
図2に示されるように、監視装置100は、通信部110と、記憶部120と、情報処理部130と、I/F部140と、操作部150と、各構成要素を図2に示されているように電気的に接続するためのアドレスバスやデータバスなどのバスライン160とを備える。
通信部110は、通信モジュールによって実現される。通信部110は、ネットワーク50を経由して、LTE(Long Term Evolution)などの携帯電話の通信規格、無線LAN(登録商標)などの通信規格にしたがって、自動運転車両Aucの車載装置などの他の装置と通信を行う。具体的には、通信部110は、自動運転車両Auc−1の車載装置〜自動運転車両Auc−nの車載装置の各々が送信した走行情報を受信し、受信した走行情報を、情報処理部130へ出力する。また、通信部110は、自動運転車両Auc−1の車載装置〜自動運転車両Auc―nの車載装置の各々が送信したアラームを受信し、受信したアラームを、情報処理部130へ出力する。
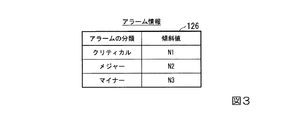
記憶部120は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ、またはこれらのうち複数が組み合わされたハイブリッド型記憶装置などにより実現される。記憶部120には、情報処理部130により実行されるプログラム122と、アプリ124と、アラーム情報126とが記憶される。
アプリ124は、監視装置100に、自動運転車両Auc−1〜自動運転車両Auc−nの各々が送信した走行情報を受信させる。アプリ124は、監視装置100に、自動運転車両Auc−1〜自動運転車両Auc−nの各々が送信したアラームを受信させる。アプリ124は、監視装置100に、受信させたアラームに基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々の監視コストを導出させる。アプリ124は、監視装置100に、導出させた自動運転車両Auc−1〜自動運転車両Auc−nの各々の監視コストに基づいて、監視者Ob−1と、監視者Ob−2とに、監視させる自動運転車両Aucを割り当てさせる。アプリ124は、監視装置100に、監視させる自動運転車両Aucの割り当て結果に基づいて、監視モニタ200−1へ、割り当てた複数の自動運転車両Aucの各々の走行情報を送信させる。アプリ124は、監視装置100に、監視させる自動運転車両Aucの割り当て結果に基づいて、監視モニタ200−2へ、割り当てた複数の自動運転車両Aucの各々の走行情報を送信させる。
クリティカルに分類されるアラーム(以下「クリティカルアラーム」いう)は、監視者Ob−1と、監視者Ob−2との各々に、即時対応が必要となる場合に、自動運転車両Auc−1〜自動運転車両Auc−nの各々が送信するアラームである。クリティカルアラームには、自動運転車両Auc−1〜自動運転車両Auc−nの各々が、障害物を検知したことによって停止した場合に送信するアラームと、自動運転システムが停止したことによって自動運転車両Auc−1〜自動運転車両Auc−nの各々が送信するアラームと、緊急停止ボタンが押されたことによって自動運転車両Auc−1〜自動運転車両Auc−nの各々が送信するアラームとが含まれる。自動運転車両Auc−1〜自動運転車両Auc−nの各々は、クリティカルアラームを検出した場合に、自動運転車両のIDと、アラームの分類を示す情報と、アラームの内容を示す情報とを含むアラームを作成し、作成したアラームを、監視装置100へ送信する。具体的には、自動運転車両Auc−1〜自動運転車両Auc−nの各々は、障害物を検知したことによって停止した場合に、自動運転車両AucのIDと、メジャーを示す情報と、障害物を検知したことを示す情報とを含むアラームを作成し、作成したアラームを、監視装置100へ送信する。自動運転車両Aucは、自動運転システムのエラーを検知した場合に、自動運転車両AucのIDと、メジャーを示す情報と、自動運転システムのエラーを検知したことを示す情報とを含むアラームを作成し、作成したアラームを、監視装置100へ送信する。自動運転車両Aucは、緊急停止ボタンが押されたことを検知した場合に、自動運転車両AucのIDと、メジャーを示す情報と、緊急停止ボタンが押されたことを検知したことを示す情報とを含むアラームを作成し、作成したアラームを、監視装置100へ送信する。
傾斜値は、監視コストを導出する際に、クリティカルアラームと、メジャーアラームと、マイナーアラームとのバランスを調整するために使用する値である。図3に示される例では、クリティカルアラームの傾斜値はN1であり、メジャーアラームの傾斜値はN2であり、マイナーアラームはN3である(N1>N2>N3)。図2に戻り説明を続ける。
監視コスト導出部134は、受付部132が出力したアラームを取得し、取得したアラームに含まれる自動運転車両AucのIDと、アラームの分類を示す情報と、アラームの内容を示す情報とを取得する。監視コスト導出部134は、取得した自動運転車両AucのIDと、アラームの分類を示す情報とに基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々のID毎に、クリティカルアラームの数Crと、メジャーアラームの数Mjと、マイナーアラームの数Mnとを集計する。監視コスト導出部134は、自動運転車両Auc−1〜自動運転車両Auc−nの各々のID毎に集計したクリティカルアラームの数Crと、メジャーアラームの数Mjと、マイナーアラームの数Mnと、記憶部120に記憶されたアラーム情報126に含まれるクリティカルアラームの傾斜値N1と、メジャーアラームの傾斜値N2と、マイナーアラームの傾斜値N3とに基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々のID毎に監視コストを導出する。具体的には、監視コスト導出部134は、自動運転車両Auc−1〜自動運転車両Auc−nの各々のID毎に、クリティカルアラームの数Crと、メジャーアラームの数Mjと、マイナーアラームの数Mnと、クリティカルアラームの傾斜値N1と、メジャーアラームの傾斜値N2と、マイナーアラームの傾斜値N3とを、式(1)に代入することによって、監視コストを導出する。
割当部136は、監視コスト導出部134が出力した監視情報を取得し、取得した監視情報に含まれる自動運転車両のIDと、監視コストと、アラームの内容を示す情報とを取得する。割当部136は、取得した自動運転車両Auc−1〜自動運転車両Auc−nの各々の監視コストに基づいて、監視コストの合計が均等になるように、監視者Ob−1と、監視者Ob−2との各々に、自動運転車両Auc−1〜自動運転車両Auc−nの各々を割り当てる。割当部136は、監視者Ob−1に割り当てた自動運転車両AucのIDが含まれる監視情報に含まれるアラームの内容を示す情報を取得する。また、割当部136は、監視者Ob−1に割り当てた自動運転車両Aucが送信した走行情報を取得する。割当部136は、監視者Ob−1に割り当てた自動運転車両AucのID毎に、取得したアラームの内容を示す情報と、走行情報とを含む走行状況監視情報を作成し、作成した走行状況監視情報を、I/F部140を経由して、監視モニタ200−1へ出力する。割当部136は、監視者Ob−2に割り当てた自動運転車両Aucが送信した走行情報を取得する。割当部136は、監視者Ob−2に割り当てた自動運転車両AucのID毎に、取得したアラームの内容を示す情報と、走行情報とを含む走行状況監視情報を作成し、作成した走行状況監視情報を、I/F部140を経由して、監視モニタ200−2へ出力する。
操作部150は、監視者Ob−1と、監視者Ob−2との各々の操作を受け付ける入力デバイスである。具体的には、監視者Ob−1と、監視者Ob−2との各々が、操作部150を操作することによって、自動運転車両Auc毎にアラームに対応する操作を行った場合に、自動運転車両AucのIDと、操作内容を示す情報とを含むアラーム対応操作情報を作成し、作成したアラーム対応操作情報を、通信部110へ出力する。通信部110は、操作部150が出力したアラーム対応操作情報を取得し、取得したアラーム対応操作情報を、自動運転車両Aucへ送信する。自動運転車両Aucは、監視装置100が送信したアラーム対応操作情報を受信し、受信したアラーム対応操作情報にしたがって処理を行う。
図4は、自動運転車両Aucの走行情報の一例を示す。図4に示される例では、自動運転車両Aucの走行情報として、フロントカメラが撮像した映像情報と、リアカメラが撮像した映像情報と、右サイドカメラが撮像した映像情報と、左サイドカメラが撮像した映像情報と、インパネカメラが撮像した映像情報とが、表示される。
図5は、監視モニタが表示する自動運転車両Aucの走行情報の一例を示す。図5に示される例では、監視モニタ200−1と、監視モニタ200−2との各々に表示される自動運転車両Aucの走行情報の一例が示される。具体的には、監視者Ob−1と監視者Ob−2との各々に、自動運転車両Auc−1〜自動運転車両Auc−17の各々が割り当てられる。図5に示される例では、自動運転車両Auc−1〜自動運転車両Auc−9が、監視者Ob−1に割り当てられ、自動運転車両Auc−10〜自動運転車両Auc−17が、監視者Ob−2に割り当てられる。その結果、監視モニタ200−1には、自動運転車両Auc−1〜自動運転車両Auc−9の走行情報が表示され、監視モニタ200−2には、自動運転車両Auc−10〜自動運転車両Auc−17の走行情報が表示される。
図6は、第1の実施形態の監視システムの動作の一例を示す。図6に示される例では、一例として、nが3である場合について説明する。また、監視装置100は、自動運転車両Acu−1〜自動運転車両Auc−3の各々が送信した走行情報を受信している前提で説明する。監視装置100は、30秒〜1分などの所定の周期で、図6に示される処理を実行する。ただし、クリティカルのアラームが発生した場合などに、監視者Ob−1と、監視者Ob−2とのいずれか一方又は両方が自動運転車両Auc−1〜自動運転車両Auc−3のいずれかの運転に介入した場合には、所定の周期に限らず、監視装置100は、直ちに、監視者Ob−1と、監視者Ob−2との各々に、自動運転車両Auc−1〜自動運転車両Auc−3のうち、運転に介入した自動運転車両以外の自動運転車両を再割り当ててもよい。
(ステップS1)
自動運転車両Auc−1は、自動運転車両Auc−1のIDと、アラームの分類を示す情報と、アラームの内容を示す情報とを含む第1アラームを作成し、作成した第1アラームを、監視装置100へ送信する。
(ステップS2)
監視装置100の通信部110は、自動運転車両Auc−1が送信した第1アラームを受信し、受信した第1アラームを、情報処理部130へ出力する。
(ステップS3)
自動運転車両Auc−2は、自動運転車両Auc−2のIDと、アラームの分類を示す情報と、アラームの内容を示す情報とを含む第2アラームを作成し、作成した第2アラームを、監視装置100へ送信する。
(ステップS4)
監視装置100の通信部110は、自動運転車両Auc−2が送信した第2アラームを受信し、受信した第2アラームを、情報処理部130へ出力する。
(ステップS5)
自動運転車両Auc−3は、自動運転車両Auc−3のIDと、アラームの分類を示す情報と、アラームの内容を示す情報とを含む第3アラームを作成し、作成した第3アラームを、監視装置100へ送信する。
監視装置100の通信部110は、自動運転車両Auc−3が送信した第3アラームを受信し、受信した第3アラームを、情報処理部130へ出力する。
(ステップS7)
受付部132は、通信部110が出力した第1アラームと第2アラームと第3アラームとを取得し、取得した第1アラームと第2アラームと第3アラームとを、監視コスト導出部134へ出力する。監視コスト導出部134は、受付部132が出力した第1アラームと第2アラームと第3アラームとを取得し、取得した第1アラームと第2アラームと第3アラームとの各々に含まれる自動運転車両AucのIDと、アラームの分類を示す情報と、アラームの内容を示す情報とを取得する。監視コスト導出部134は、取得した自動運転車両AucのIDと、アラームの分類を示す情報とに基づいて、自動運転車両Auc−1〜自動運転車両Auc−3の各々のID毎に、クリティカルアラームの数Crと、メジャーアラームの数Mjと、マイナーアラームの数Mnとを集計する。監視コスト導出部134は、自動運転車両Auc−1〜自動運転車両Auc−3の各々のID毎に集計したクリティカルアラームの数Crと、メジャーアラームの数Mjと、マイナーアラームの数Mnと、記憶部120に記憶されたアラーム情報126に含まれるクリティカルアラームの傾斜値N1と、メジャーアラームの傾斜値N2と、マイナーアラームの傾斜値N3とに基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々のID毎に監視コストを導出する。
監視コスト導出部134は、自動運転車両Auc−1〜自動運転車両Auc−3の各々のID毎に、自動運転車両AucのIDと、その自動運転車両Aucの監視コストと、その自動運転車両Aucが送信したアラームに含まれるアラームの内容を示す情報とを関連付けた情報である監視情報を、割当部136へ出力する。
(ステップS8)
割当部136は、監視コスト導出部134が出力した監視情報を取得し、取得した監視情報に含まれる自動運転車両のIDと、監視コストと、アラームの内容を示す情報とを取得する。割当部136は、取得した自動運転車両Auc−1〜自動運転車両Auc−3の各々の監視コストに基づいて、監視コストの合計が均等になるように、監視者Ob−1と、監視者Ob−2との各々に、自動運転車両Auc−1〜自動運転車両Auc−3の各々を割り当てる。その後、割当部136は、監視者Ob−1に割り当てた自動運転車両AucのIDが含まれる監視情報に含まれるアラームの内容を示す情報を取得する。また、割当部136は、監視者Ob−1に割り当てた自動運転車両Aucが送信した走行情報を取得する。割当部136は、監視者Ob−1に割り当てた自動運転車両AucのID毎に、取得したアラームの内容を示す情報と、走行情報とを含む走行状況監視情報を作成し、作成した走行状況監視情報を、I/F部140を経由して、監視モニタ200−1へ出力する。割当部136は、監視者Ob−2に割り当てた自動運転車両Aucが送信した走行情報を取得する。割当部136は、監視者Ob−2に割り当てた自動運転車両AucのID毎に、取得したアラームの内容を示す情報と、走行情報とを含む走行状況監視情報を作成し、作成した走行状況監視情報を、I/F部140を経由して、監視モニタ200−2へ出力する。
図7と、図8とに示される例では、一台の監視モニタ200で監視可能な自動運転車両Aucの数は、最大9台であると仮定する。
(1)初期状態では、監視モニタ200−1には、「1」〜「9」の数値で示すように、九台の自動運転車両Aucの走行状況が表示される。以下、監視モニタ200−1に走行状況が表示されている九台の自動運転車両Aucの各々を、自動運転車両Auc−1〜自動運転車両Auc−9と記載する。初期状態では、監視モニタ200−2には、「10」〜「17」の数値で示すように、八台の自動運転車両Aucの走行状況が表示される。以下、監視モニタ200−2に走行状況が表示されている八台の自動運転車両Aucの各々を、自動運転車両Auc−10〜自動運転車両Auc−17と記載する。
(2)アラーム検知では、監視モニタ200−1に表示される九台の自動運転車両Aucの走行状況のうち、「6」の数値で示されている位置に走行状況が表示されている自動運転車両Auc−6が、自動運転車両AucのIDと、マイナーを示す情報と、アラームの内容を示す情報とを含むアラームを送信する。監視装置100は、「6」の数値で示されている位置に走行状況が表示される自動運転車両Auc−6が送信したアラームを受信し、受信したアラームに含まれる自動運転車両AucのIDと、アラームの分類を示す情報と、アラームの内容を示す情報とを取得する。監視モニタ200−1の「6」に示される自動運転車両Aucの走行状況には「アラーム検知」が表示される。
(4)監視画面移動では、監視装置100は、監視者Ob−1と、監視者Ob−2との各々に、自動運転車両Auc−1〜自動運転車両Auc−17の各々を割り当てた結果、監視者Ob−1には、自動運転車両Auc−1〜自動運転車両Auc−5と、自動運転車両Auc−7〜自動運転車両Auc−9とが割り当てられ、監視者Ob−2には、自動運転車両Auc−6と、自動運転車両Auc−10〜自動運転車両Auc−17とが割り当てられる。その結果、監視モニタ200−1に表示されていた自動運転車両Auc−6に該当する走行状況が移動し、監視モニタ200−2に表示される。 前述した実施形態では、監視システム10が、監視モニタ200−1と監視モニタ200−2とを備える場合について説明したが、この例に限られない。例えば、監視システム10が、三台以上の監視モニタを備えてもよい。このように構成することによって、二人以上の監視者で、自動運転車両Auc−1〜自動運転車両Auc−nを監視できる。 前述した実施形態では、クリティカルアラームと、メジャーアラームと、マイナーアラームとの各々に対して、傾斜値が設定される場合について説明したが、この例に限られない。例えば、クリティカルアラームと、メジャーアラームと、マイナーアラームとの各々に限らず、個々のアラーム毎に傾斜値を設定してもよい。
前述した実施形態では、監視装置100が、自動運転車両Auc−1〜自動運転車両Auc−nの各々の監視コストに基づいて、監視コストの合計が均等になるように、監視者Ob−1と、監視者Ob−2との各々に、自動運転車両Auc−1〜自動運転車両Auc−nの各々を割り当てる場合について説明したが、この例に限られない。例えば、監視装置100に、監視者Ob−1が監視できる第1エリアと、監視者Ob−2が監視できる第2エリアとを登録する。ここで、第1エリアには、監視者Ob−1が知っている道路が含まれ、第2エリアには、監視者Ob−2が知っている道路が含まれる。監視装置100は、自動運転車両Auc−1〜自動運転車両Auc−nの各々の監視コストに加え、自動運転車両Auc−1〜自動運転車両Auc−nの各々の目的地までの経路が、第1エリアに含まれるか(監視者Ob−1が知っているか)、第2エリアに含まれるか(監視者Ob−2が知っているか)に基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々を、監視者Ob−1と、監視者Ob−2とに割り当ててもよい。
前述した実施形態では、監視装置100に対して操作が行われた場合に、監視装置100は、アラーム対応操作情報を作成し、作成したアラーム対応操作情報を、自動運転車両Aucへ送信するについて説明したが、この例に限られない。例えば、監視装置100とは独立した遠隔操作部を用意し、監視者Obが遠隔操作部を操作することによって、遠隔操作部は、アラーム対応操作情報を作成し、作成したアラーム対応操作情報を、監視装置100を経由しないで、自動運転車両Aucへ送信してもよい。このように構成することによって、仮に、監視装置100を操作した場合に生じるおそれがある操作部150と自動運転車両Aucと間の通信遅延を最小化できる。
前述した実施形態では、監視装置100が、監視者Ob−1と監視者Ob−2とに、監視コストの合計が均等になるように、自動運転車両Auc−1〜自動運転車両Auc−nの各々を割り当てる場合について説明したが、この例に限られない。例えば、監視者Obの熟練度に応じて、許容される監視コストの上限値を設定し、監視コストの合計が、許容される監視コストの上限値以下となるように、割り当ててもよい。その場合、各監視者に割振る監視コストの割当は、各監視者の上限値に対して均等な比になるように設定してもよい。例えば、監視者Aの監視コストの上限値が100、監視者Bの監視コストの上限値が200の場合で、監視コストの合計が150の場合に、監視装置100は、監視者Aと、監視者Bとの各々に、同数の75を割り当てるのではなく、監視者Aには50(上限値の50%)、監視者Bには100(上限値の50%)割り当てることで、監視者間の負荷を平均化する。
前述した実施形態において、自動運転車両Auc−1〜自動運転車両Auc−nとの各々に、ベースとなる一定のコスト(以下「ベースコスト」という)が設定されてもよい。ここで、ベースコストは、アラームが発生しない場合でも発生するコストであり、車両特性(小型車や大型車、年式など)に応じて異ならせてもよい。
第1の実施形態の監視システム10によれば、監視装置100は、自動運転車両Auc−1〜自動運転車両Auc−nを監視する。監視装置100は、自動運転車両Auc−1が送信する第1アラーム〜自動運転車両Auc−nが送信する第nアラームを受信し、受信した第1アラーム〜第nアラームに基づいて、監視コストを導出する。監視装置100は、導出した監視コストに基づいて、複数の監視者の各々に監視させる自動運転車両を割り当てる。監視コストに基づいて、監視させる自動運転車両を、複数の監視者の間で分散させることによって、一人の監視者にかかる負担を低減できるため、自動運転車両Aucの監視精度を向上できる。特に、M人の監視者が、N台(M<N)の自動運転車両を監視する場合には、自動運転車両の台数は、三台以上である必要がある。
第1の実施形態の変形例の監視システム10aは、図1を適用できる。ただし、監視システム10aは、監視装置100の代わりに監視装置100aを備える。監視システム10aでは、自動運転車両Auc−1〜自動運転車両Auc−nの各々は、自動運転車両のIDと、アラームの分類を示す情報と、アラームの内容を示す情報とに加え、自動運転車両の位置情報を含むアラームを送信する。監視装置100aは、自動運転車両Auc−1〜自動運転車両Auc−nの各々が送信した走行情報を受信する。監視装置100aは、自動運転車両Auc−1〜自動運転車両Auc−nの各々が送信したアラームを受信し、受信したアラームに基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々毎に、監視コストを導出する。監視装置100aは、自動運転車両Auc−1〜自動運転車両Auc−nの各々の位置情報に基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々毎に、目的地へ到着するまでの残りの経路などの現在の位置と目的地との関係を導出する。以下、現在の位置と目的値との関係の一例として、目的地へ到着するまでの残りの経路を使用する場合について説明を続ける。
監視装置100aは、導出した監視コストに基づいて、監視者Ob−1と、監視者Ob−2との間で、監視させる自動運転車両Aucの割り当てを変更する場合に、残りの経路に基づいて変更する。具体的には、監視装置100は、残りの経路が長い自動運転車両Aucの監視者Obを変更し、残りの経路が短い自動運転車両Aucの監視者Obは変更しない。つまり、監視装置100aは、残りの経路が長い自動運転車両Aucの監視者Obから順に変更する。
図9に示されるように、監視装置100aは、通信部110と、記憶部120aと、情報処理部130aと、I/F部140と、操作部150と、各構成要素を図9に示されているように電気的に接続するためのアドレスバスやデータバスなどのバスライン160とを備える。
記憶部120aは、記憶部120を適用できる。記憶部120aには、情報処理部130aにより実行されるプログラム122と、アプリ124aと、アラーム情報126とが記憶される。アプリ124aは、監視装置100aに、アプリ124に加え、以下の処理を実行させる。アプリ124aは、監視装置100aに、導出させた監視コストに基づいて、監視者Ob−1と、監視者Ob−2との間で、監視させる自動運転車両Aucの割り当てを変更する場合に、目的地までの残りの経路に基づいて、残りの経路が長い自動運転車両Aucの監視者Obから順に変更させる。
情報処理部130aは、情報処理部130を適用できる。情報処理部130aは、例えば、受付部132と、監視コスト導出部134aと、割当部136aとを備える。監視コスト導出部134aは、監視コスト導出部134の機能に加えて、以下の機能を備える。監視コスト導出部134aは、受付部132が出力したアラームを取得し、取得したアラームに含まれる自動運転車両AucのIDと、アラームの分類を示す情報と、アラームの内容を示す情報と、自動運転車両Aucの位置情報とを取得する。監視コスト導出部134aは、取得した自動運転車両Aucの位置情報を、割当部136aへ出力する。
割当部136aは、割当部136の機能に加えて、以下の機能を備える。割当部136aは、監視コスト導出部134aが出力した自動運転車両Aucの位置情報を取得する。割当部136aは、自動運転車両Auc−1〜自動運転車両Auc−nの各々の位置情報に基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々毎に、目的地へ到着するまでの残りの経路を導出する。割当部136aは、導出した監視コストに基づいて、監視者Ob−1と、監視者Ob−2との間で、監視させる自動運転車両Aucの割り当てを変更する場合に、残りの経路に基づいて変更する。具体的には、割当部136aは、残りの経路が長い自動運転車両Aucの監視者Obを変更し、目的地までの残りの経路が短い自動運転車両Aucを監視する監視者Obは変更しない。つまり、割当部136aは、目的地までの残りの経路が長い自動運転車両Aucの監視者Obから順に変更する。
前述した第1の実施形態の変形例では、監視装置100aが、監視させる自動運転車両Aucの割り当てを変更する場合に、目的地までの残りの経路が長い自動運転車両Aucの監視者Obから順に変更する場合について説明したがこの例に限られない。例えば、監視装置100aは、目的地へ到着するまでの残りの時間に基づいて、監視させる自動運転車両Aucの割り当てを変更してもよい。具体的には、監視装置100aは、残りの時間が長い自動運転車両Aucの監視者Obを変更し、目的地までの残りの時間が短い自動運転車両Aucの監視者Obは変更しなくてもよい。つまり、監視装置100aは、目的地までの残りの時間が長い自動運転車両Aucの監視者Obから順に変更してもよい。また、監視装置100aは、監視させる自動運転車両Aucの割り当てを変更する場合に、目的地までの経路に対する残りの経路の割合に基づいて、監視させる自動運転車両Aucの割り当てを変更してもよい。具体的には、監視装置100aは、目的地までの経路に対する残りの経路の割合が高い自動運転車両Aucの監視者Obを変更し、目的地までの経路に対する残りの経路の割合が低い自動運転車両Aucの監視者Obは変更しなくてもよい。つまり、監視装置100aは、目的地までの経路に対する残りの経路の割合が高い自動運転車両Aucの監視者Obから順に変更してもよい。
また、監視装置100aは、監視させる自動運転車両Aucの割り当てを変更する場合に、目的地までに要する時間に対する残りの時間の割合に基づいて、監視させる自動運転車両Aucの割り当てを変更してもよい。具体的には、監視装置100aは、目的地までに要する時間に対する残りの時間の割合が高い自動運転車両Aucの監視者Obを変更し、目的地までに要する時間に対する残りの時間の割合が低い自動運転車両Aucの監視者Obは変更しなくてもよい。つまり、監視装置100aは、目的地までに要する時間に対する残りの時間の割合が高い自動運転車両Aucの監視者Obから順に変更してもよい。また、監視装置100aは、目的地までに要する時間に対する残りの時間の割合が低い自動運転車両Aucの監視者Obを変更し、目的地までに要する時間に対する残りの時間の割合が高い自動運転車両Aucの監視者Obは変更しなくてもよい。つまり、監視装置100aは、目的地までに要する時間に対する残りの時間の割合が低い自動運転車両Aucの監視者Obから順に変更してもよい。
第1の実施形態の変形例の監視システム10aによれば、監視装置100aは、自動運転車両Acu−1が送信する自動運転車両Acu−1の第1位置情報〜自動運転車両Acu−nが送信する自動運転車両Acu−nの第n位置情報を受信する。監視装置100aは、受信した第1位置情報〜第n位置情報に基づいて、第1位置情報と自動運転車両Acu−1の第1目的地との関係である第1関係〜第n位置情報と自動運転車両Acu−nの第n目的地との関係である第n関係を導出し、導出した第1関係〜第n関係に基づいて、複数の監視者の各々に監視させる自動運転車両を変更する。このように、第1関係〜第n関係に基づいて、監視者Ob−1と、監視者Ob−2との各々に監視させる自動運転車両を変更することによって、例えば、目的地までの残りの経路が長い自動運転車両Aucの監視者Obから順に変更できるため、目的地が近付くにしたがって、自動運転車両Aucの監視者Obが頻繁に変わることを防止できる。
第2の実施形態の監視システム10bは、図1を適用できる。ただし、監視システム10bは、監視装置100の代わりに監視装置100bを備える。監視システム10bでは、自動運転車両Auc−1〜自動運転車両Auc−nの各々は、自動運転車両AucのIDと、アラームの分類を示す情報と、アラームの内容を示す情報とに加え、自動運転車両Aucの位置情報を含むアラームを送信する。監視装置100bは、自動運転車両Auc−1〜自動運転車両Auc−nの各々が送信した走行情報を受信する。監視装置100bは、自動運転車両Auc−1〜自動運転車両Auc−nの各々が送信したアラームを受信し、受信したアラームと、自動運転車両Auc−1〜自動運転車両Auc−nの各々が走行する経路に含まれる監視に注意を要する箇所である注意箇所とに基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々毎に、監視コストを導出する。監視装置100bは、導出した監視コストに基づいて、監視者Ob−1と、監視者Ob−2とに、監視させる自動運転車両Aucを割り当てる。監視装置100bは、監視させる自動運転車両Aucの割り当て結果に基づいて、監視モニタ200−1へ、割り当てた複数の自動運転車両Aucの各々の走行情報を送信する。また、監視装置100bは、監視させる自動運転車両Aucの割り当て結果に基づいて、監視モニタ200−2へ、割り当てた複数の自動運転車両Aucの各々の走行情報を送信する。
図10に示されるように、監視装置100bは、通信部110と、記憶部120bと、情報処理部130bと、I/F部140と、操作部150と、各構成要素を図10に示されているように電気的に接続するためのアドレスバスやデータバスなどのバスライン160とを備える。
記憶部120bは、記憶部120を適用できる。記憶部120bには、情報処理部130bにより実行されるプログラム122と、アプリ124bと、アラーム情報126とが記憶される。アプリ124bは、監視装置100bに、アプリ124が実行させる処理に加え、以下の処理を実行させる。アプリ124bは、監視装置100bに、受信させたアラームと、自動運転車両Auc−1〜自動運転車両Auc−nの各々が走行する経路に含まれる注意箇所とに基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々毎に、監視コストを導出させる。
情報処理部130bは、情報処理部130を適用できる。情報処理部130bは、例えば、受付部132と、注意箇所導出部133と、監視コスト導出部134bと、割当部136とを備える。受付部132は、通信部110が出力したアラームを取得し、取得したアラームを、注意箇所導出部133と、監視コスト導出部134bとへ出力する。
注意箇所導出部133は、受付部132が出力したアラームを取得し、取得したアラームに含まれる自動運転車両Aucの位置情報を取得する。監視コスト導出部134bは、取得した自動運転車両Aucの位置情報に基づいて、自動運転車両Aucが、取得した位置情報の位置から目的地へ到着するまでに走行する経路を特定する。さらに、監視コスト導出部134bは、特定した経路に含まれる注意箇所を特定する。ここで、注意箇所の一例は、過去に、自動運転車両が停車した箇所である。監視装置100bは、自動運転車両Aucが停車した箇所を示す情報を蓄積している。注意箇所導出部133は、自動運転車両Auc−1〜自動運転車両Auc−nの各々毎に特定した注意箇所を示す情報を、監視コスト導出部134bへ出力する。
(監視システムの動作)
図11には、一例として、nが3である場合について説明する。また、監視装置100bは、自動運転車両Acu−1〜自動運転車両Auc−nの各々が送信した走行情報を受信している前提で説明する。監視装置100bは、30秒〜1分などの所定の周期で、図11に示される処理を実行する。
(ステップS11)
自動運転車両Auc−1は、自動運転車両Auc−1のIDと、アラームの分類を示す情報と、アラームの内容を示す情報と、自動運転車両Auc−1の位置情報とを含む第1アラームを作成し、作成した第1アラームを、監視装置100bへ送信する。
(ステップS12)
監視装置100bの通信部110は、自動運転車両Auc−1が送信した第1アラームを受信し、受信した第1アラームを、情報処理部130bへ出力する。
(ステップS13)
自動運転車両Auc−2は、自動運転車両Auc−2のIDと、アラームの分類を示す情報と、アラームの内容を示す情報と、自動運転車両Auc−2の位置情報とを含む第2アラームを作成し、作成した第2アラームを、監視装置100bへ送信する。
(ステップS14)
監視装置100bの通信部110は、自動運転車両Auc−2が送信した第2アラームを受信し、受信した第2アラームを、情報処理部130bへ出力する。
(ステップS15)
自動運転車両Auc−3は、自動運転車両Auc−3のIDと、アラームの分類を示す情報と、アラームの内容を示す情報と、自動運転車両Auc−3の位置情報とを含む第3アラームを作成し、作成した第3アラームを、監視装置100bへ送信する。
監視装置100bの通信部110は、自動運転車両Auc−3が送信した第3アラームを受信し、受信した第3アラームを、情報処理部130bへ出力する。
(ステップS17)
受付部132は、通信部110が出力した第1アラームと第2アラームと第3アラームとを取得し、取得した第1アラームと第2アラームと第3アラームとを、注意箇所導出部133と、監視コスト導出部134bとへ出力する。注意箇所導出部133は、受付部132が出力したアラームを取得し、取得したアラームに含まれる自動運転車両Aucの位置情報を取得する。注意箇所導出部133は、取得した自動運転車両Aucの位置情報に基づいて、自動運転車両Aucが、取得した位置情報の位置から目的地へ到着するまでに走行する経路に含まれる注意箇所を特定する。注意箇所導出部133は、自動運転車両Auc−1〜自動運転車両Auc−nの各々毎に特定した注意箇所を示す情報を、監視コスト導出部134bへ出力する。
(ステップS18)
監視コスト導出部134bは、受付部132が出力した第1アラームと第2アラームと第3アラームとを取得し、取得した第1アラームと第2アラームと第3アラームとの各々に含まれる自動運転車両AucのIDと、アラームの分類を示す情報と、アラームの内容を示す情報とを取得する。監視コスト導出部134bは、取得した自動運転車両AucのIDと、アラームの分類を示す情報と、注意箇所を示す情報とに基づいて、自動運転車両Auc−1〜自動運転車両Auc−3の各々のID毎に、クリティカルアラームの数Crと、メジャーアラームの数Mjと、マイナーアラームの数Mnと、注意箇所の数Rtとを集計する。監視コスト導出部134bは、自動運転車両Auc−1〜自動運転車両Auc−3の各々のID毎に集計したクリティカルアラームの数Crと、メジャーアラームの数Mjと、マイナーアラームの数Mnと、注意箇所の数Rtと、注意箇所の傾斜値N4と、記憶部120に記憶されたアラーム情報126に含まれるクリティカルアラームの傾斜値N1と、メジャーアラームの傾斜値N2と、マイナーアラームの傾斜値N3とに基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々のID毎に監視コストを導出する。監視コスト導出部134bは、自動運転車両Auc−1〜自動運転車両Auc−3の各々のID毎に、自動運転車両AucのIDと、その自動運転車両Aucの監視コストと、その自動運転車両Aucが送信したアラームに含まれるアラームの内容を示す情報とを関連付けた情報である監視情報を、割当部136へ出力する。
前述した第2の実施形態では、自動運転車両Auc−1〜自動運転車両Auc−nの各々が走行する経路に含まれる監視に注意を要する注意箇所に基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々毎に、監視コストを導出する場合について説明したが、この例に限られない。例えば、監視装置100aは、複数の道路の各々と、その道路の監視コストとを関連付けて記憶し、自動運転車両Auc−1〜自動運転車両Auc−nの各々が走行する経路に関連付けられている道路の監視コストに基づいて、自動運転車両Auc−1〜自動運転車両Auc−nの各々毎に、監視コストを導出してもよい。
第2の実施形態の監視システム10bによれば、監視装置100bは、自動運転車両Auc−1が走行する第1経路〜自動運転車両Auc−nが走行する第n経路にさらに基づいて、監視コストを導出する。このように構成することによって、自動運転車両Aucが走行する経路に基づいて、監視コスト導出できるため、監視コストの導出精度を向上できる。このため、一人の監視者にかかる負荷をより均等にできる。
さらに、監視装置100bは、自動運転車両Auc−1が走行する第1経路に含まれる監視に注意を要する箇所である第1注意箇所〜自動運転車両Auc−nが走行する第n経路に含まれる監視に注意を要する箇所である第n注意箇所を導出し、導出した第1注意箇所を示す情報〜第n注意箇所を示す情報にさらに基づいて、監視コストを導出する。このように構成することによって、自動運転車両Aucが走行する経路に含まれる注意箇所に基づいて監視コストを導出できるため、監視コストの導出精度を向上できる。このため、一人の監視者にかかる負荷をより均等にできる。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROMなどの可搬媒体のことをいう。また、「コンピュータ読み取り可能な記録媒体」は、コンピュータシステムに内蔵されるハードディスクなどの記憶装置を含む。さらに「コンピュータ読み取り可能な記録媒体」とは、短時間の間、動的にプログラムを保持するものを含んでいてもよい。短時間の間、動的にプログラムを保持するものは、例えば、インターネットなどのネットワークや電話回線などの通信回線を介してプログラムを送信する場合の通信線である。
また、「コンピュータ読み取り可能な記録媒体」には、サーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含んでもよい。また上記プログラムは、前述した機能の一部を実現するためのものであってもよい。また、上記プログラムは、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであってもよい。また、上記プログラムは、プログラマブルロジックデバイスを用いて実現されるものであってもよい。プログラマブルロジックデバイスは、例えば、FPGA(Field Programmable Gate Array)である。
Claims (9)
- 複数の自動運転車両を監視する監視システムであって、
複数の前記自動運転車両の各々が送信するアラームを受信する通信部と、
前記通信部が受信した複数の前記自動運転車両の各々が送信するアラームに基づいて、監視者が自動運転車両を監視する作業負荷の度合いを示す指標である監視コストを導出する監視コスト導出部と、
前記監視コスト導出部が導出した前記監視コストに基づいて、複数の監視者の各々に監視させる自動運転車両を割り当てる割当部と
を備える、監視システム。 - 前記通信部は、複数の前記自動運転車両の各々が送信する前記自動運転車両の位置情報を受信し、
前記割当部は、前記通信部が受信した複数の前記位置情報の各々に基づいて、前記位置情報と、前記位置情報を送信した自動運転車両の目的地との関係を導出し、導出した前記関係に基づいて、複数の前記監視者の各々に監視させる自動運転車両を変更する、請求項1に記載の監視システム。 - 前記監視コスト導出部は、複数の前記自動運転車両の各々が走行する経路にさらに基づいて、前記監視コストを導出する、請求項1又は請求項2に記載の監視システム。
- 前記経路に含まれる監視に注意を要する箇所である注意箇所を導出する注意箇所導出部
を備え、
前記監視コスト導出部は、前記注意箇所導出部が導出した前記注意箇所を示す情報にさらに基づいて、前記監視コストを導出する、請求項3に記載の監視システム。 - 前記割当部は、複数の前記自動運転車両の各々が走行する経路を、複数の前記監視者の各々が知っているか否かにさらに基づいて、複数の前記監視者の各々に監視させる自動運転車両を割り当てる、請求項1から請求項4のいずれか一項に記載の監視システム。
- 前記監視コスト導出部は、複数の前記自動運転車両の各々が送信したアラームが、複数の前記自動運転車両のいずれかの運転への介入を要する場合に、直ちに前記監視コストを再導出し、
前記割当部は、前記監視コスト導出部が再導出した前記監視コストに基づいて、複数の監視者の各々に監視させる自動運転車両を割り当てる、請求項1から請求項5のいずれか一項に記載の監視システム。 - 複数の自動運転車両を監視する監視装置であって、
複数の前記自動運転車両の各々が送信するアラームを受信する通信部と、
前記通信部が受信した複数の前記自動運転車両の各々が送信するアラームに基づいて、監視者が自動運転車両を監視する作業負荷の度合いを示す指標である監視コストを導出する監視コスト導出部と、
前記監視コスト導出部が導出した前記監視コストに基づいて、複数の監視者の各々に監視させる自動運転車両を割り当てる割当部と
を備える、監視装置。 - 複数の自動運転車両を監視する監視装置が実行する監視方法であって、
複数の前記自動運転車両の各々が送信するアラームを受信するステップと、
前記受信するステップで受信した複数の前記自動運転車両の各々が送信したアラームに基づいて、監視者が自動運転車両を監視する作業負荷の度合いを示す指標である監視コストを導出するステップと、
前記導出するステップで導出した前記監視コストに基づいて、複数の監視者の各々に監視させる自動運転車両を割り当てるステップと
を有する、監視方法。 - 監視装置のコンピュータに、
複数の自動運転車両の各々が送信するアラームを受信するステップと、
前記受信するステップで受信した複数の前記自動運転車両の各々が送信したアラームに基づいて、監視者が自動運転車両を監視する作業負荷の度合いを示す指標である監視コストを導出するステップと、
前記導出するステップで導出した前記監視コストに基づいて、複数の監視者の各々に監視させる自動運転車両を割り当てるステップと
を実行させる、プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018183915A JP2020052906A (ja) | 2018-09-28 | 2018-09-28 | 監視システム、監視装置、監視方法、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018183915A JP2020052906A (ja) | 2018-09-28 | 2018-09-28 | 監視システム、監視装置、監視方法、及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020052906A true JP2020052906A (ja) | 2020-04-02 |
Family
ID=69997406
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018183915A Pending JP2020052906A (ja) | 2018-09-28 | 2018-09-28 | 監視システム、監視装置、監視方法、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020052906A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023199735A1 (ja) * | 2022-04-12 | 2023-10-19 | ソニーグループ株式会社 | 情報処理システムおよび情報処理方法、並びに、情報処理装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011128889A (ja) * | 2009-12-17 | 2011-06-30 | Mitsubishi Heavy Ind Ltd | 移動体制御システム、制御装置、制御方法、及びプログラム |
| US20160334797A1 (en) * | 2015-05-13 | 2016-11-17 | Uber Technologies, Inc. | Selecting vehicle type for providing transport |
| JP2018062223A (ja) * | 2016-10-12 | 2018-04-19 | 矢崎総業株式会社 | 車両システム |
| WO2018106755A1 (en) * | 2016-12-06 | 2018-06-14 | Nissan North America, Inc. | Generation of solution data for autonomous vehicles to negotiate problem situations |
| JP6353126B1 (ja) * | 2017-06-07 | 2018-07-04 | ヤフー株式会社 | 決定装置、決定方法、及び決定プログラム |
| US20180211543A1 (en) * | 2015-11-09 | 2018-07-26 | Beijing Qihoo Technology Company Limited | Method, apparatus and system for monitoring vehicle driving safety |
| JP2018142265A (ja) * | 2017-02-28 | 2018-09-13 | パナソニックIpマネジメント株式会社 | 管理装置、管理方法、及び管理プログラム |
-
2018
- 2018-09-28 JP JP2018183915A patent/JP2020052906A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011128889A (ja) * | 2009-12-17 | 2011-06-30 | Mitsubishi Heavy Ind Ltd | 移動体制御システム、制御装置、制御方法、及びプログラム |
| US20160334797A1 (en) * | 2015-05-13 | 2016-11-17 | Uber Technologies, Inc. | Selecting vehicle type for providing transport |
| US20180211543A1 (en) * | 2015-11-09 | 2018-07-26 | Beijing Qihoo Technology Company Limited | Method, apparatus and system for monitoring vehicle driving safety |
| JP2018062223A (ja) * | 2016-10-12 | 2018-04-19 | 矢崎総業株式会社 | 車両システム |
| WO2018106755A1 (en) * | 2016-12-06 | 2018-06-14 | Nissan North America, Inc. | Generation of solution data for autonomous vehicles to negotiate problem situations |
| JP2018142265A (ja) * | 2017-02-28 | 2018-09-13 | パナソニックIpマネジメント株式会社 | 管理装置、管理方法、及び管理プログラム |
| JP6353126B1 (ja) * | 2017-06-07 | 2018-07-04 | ヤフー株式会社 | 決定装置、決定方法、及び決定プログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023199735A1 (ja) * | 2022-04-12 | 2023-10-19 | ソニーグループ株式会社 | 情報処理システムおよび情報処理方法、並びに、情報処理装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11968676B2 (en) | Uplink control information transmission method and terminal | |
| JP2021531695A (ja) | Pdcch監視方法、端末及びネットワーク機器 | |
| EP3468151A1 (en) | Acceleration resource processing method and apparatus and network function virtualization system | |
| US10044798B2 (en) | Context-aware task offloading among multiple devices | |
| CN108462999B (zh) | 一种进行资源分配的方法和设备 | |
| CN110832890B (zh) | 无线承载建立方法、装置和通信设备 | |
| EP2955946A1 (en) | Electronic device and network connection method of electronic device | |
| CN111817824B (zh) | 一种信息传输方法、终端设备和控制节点 | |
| EP3046365A1 (en) | Communication access method and user equipment | |
| CN110493756A (zh) | 投屏方法及5g终端 | |
| EP4309452A1 (en) | User equipment and resource allocation method in sidelink communication | |
| JP2020052906A (ja) | 監視システム、監視装置、監視方法、及びプログラム | |
| CN116827586A (zh) | 网络认证方法、装置、存储介质以及电子设备 | |
| CN119071071B (zh) | 一种网络访问方法、装置、设备及介质 | |
| US9363330B2 (en) | Systems and methods for managed service delivery in 4G wireless networks | |
| CN116208942A (zh) | 近域通信中继节点发现方法及相关设备 | |
| JP2019528519A (ja) | データを共有する方法及びシステム | |
| CN114095561B (zh) | 消息处理系统和方法、设备及存储介质 | |
| JP2024027342A (ja) | 情報処理装置 | |
| CN116846918A (zh) | 一种物联网IoT设备互连的方法及装置 | |
| US12532216B2 (en) | Resource allocation for low latency wireless communication | |
| CN113852486A (zh) | 对于汽车以太网的动态服务质量控制 | |
| US20240107369A1 (en) | Resource allocation for low latency wireless communication | |
| JP2017516394A (ja) | リソースブロードキャスト方法およびリソースブロードキャスト装置 | |
| CN115380611A (zh) | 终端、通信方法以及通信程序 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200731 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210519 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210601 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210721 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210810 |