JP2020009111A - 推定装置および圧力制御バルブ - Google Patents
推定装置および圧力制御バルブ Download PDFInfo
- Publication number
- JP2020009111A JP2020009111A JP2018129154A JP2018129154A JP2020009111A JP 2020009111 A JP2020009111 A JP 2020009111A JP 2018129154 A JP2018129154 A JP 2018129154A JP 2018129154 A JP2018129154 A JP 2018129154A JP 2020009111 A JP2020009111 A JP 2020009111A
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- opening
- time constant
- chamber
- control valve
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Control Of Fluid Pressure (AREA)
Abstract
【課題】実際の装置条件を反映したより適切なプラントパラメータを推定することができる推定装置の提供。【解決手段】演算部22は、真空チャンバ3のプラントパラメータ(例えば、真空チャンバ3の容積Vcや時定数Vg/Cg)を推定する。演算部22は、真空チャンバ3に所定流量Qinのガスが流入している状態で圧力制御バルブ1を第1開度から第2開度に減少させた場合の圧力計測値Pgの圧力上昇時定数Tupと、真空チャンバ3に所定流量Qinのガスが流入している状態で圧力制御バルブ1を第2開度から第1開度に増加させた場合の圧力計測値Pgの圧力下降時定数Tdownとに基づいて、真空チャンバ3の容積Vcを推定する。【選択図】図1
Description
本発明は、推定装置および圧力制御バルブに関する。
従来、排気経路のコンダクタンスを自動調節するためのバルブとして、バルブコンダクタンスを調整できる自動圧力制御バルブ(以下では、APCバルブと呼ぶことにする)が知られている(例えば、特許文献1参照)。例えば、プラズマエッチング装置では、プロセス時に、マスフローコントローラによって一定流量の処理ガスを真空チャンバ内に供給しながら、APCバルブによって排気経路のコンダクタンスを調節し、所望のプロセス圧力に制御する方法が採用されている。
上述のAPCバルブは、真空チャンバの圧力値に基づいてバルブ開度を調整してバルブコンダクタンスを変更することで、真空チャンバの圧力を所望のプロセス圧力に制御している。この圧力制御を正確に行うためには、真空チャンバ側の装置条件(以下では、プラントパラメータと呼ぶ)を正確に把握してそれを制御に反映させることが重要である。
本発明の好ましい態様による推定装置は、チャンバ内圧力を計測する真空計を備えると共に圧力制御バルブを介して排気される真空チャンバのプラントパラメータを推定する推定装置であって、前記プラントパラメータは前記真空チャンバの容積を含み、前記真空チャンバに所定流量のガスが流入している状態で前記圧力制御バルブを第1開度から第2開度に減少させた場合の前記真空計の圧力計測値の圧力上昇時定数と、前記真空チャンバに前記所定流量のガスが流入している状態で前記圧力制御バルブを前記第2開度から前記第1開度に増加させた場合の前記真空計の圧力計測値の圧力下降時定数とに基づいて、前記容積を推定する。
本発明の好ましい態様による推定装置は、チャンバ内圧力を計測する真空計を備えると共に圧力制御バルブを介して排気される真空チャンバのプラントパラメータを推定する推定装置であって、前記プラントパラメータは、前記チャンバ内圧力に対する前記真空計の圧力計測値の遅れ時定数を含み、前記真空チャンバに所定流量のガスが流入している状態で前記圧力制御バルブを第1開度から第2開度に減少させた場合の前記圧力計測値の圧力上昇時定数、または、前記真空チャンバに所定流量のガスが流入している状態で前記圧力制御バルブを前記第2開度から前記第1開度に増加させた場合の前記圧力計測値の圧力下降時定数に基づいて、前記遅れ時定数を推定する。
さらに好ましい態様では、複数の異なる前記所定流量に対する複数の前記遅れ時定数を推定し、推定した複数の前記遅れ時定数に基づいて流量と遅れ時定数との相関関係または圧力と遅れ時定数との相関関係を推定する。
本発明の好ましい態様の圧力制御バルブは、前記推定装置を備え、前記推定装置で推定された前記プラントパラメータに基づいてバルブ開度を制御する。
本発明の好ましい態様による推定装置は、チャンバ内圧力を計測する真空計を備えると共に圧力制御バルブを介して排気される真空チャンバのプラントパラメータを推定する推定装置であって、前記プラントパラメータは、前記チャンバ内圧力に対する前記真空計の圧力計測値の遅れ時定数を含み、前記真空チャンバに所定流量のガスが流入している状態で前記圧力制御バルブを第1開度から第2開度に減少させた場合の前記圧力計測値の圧力上昇時定数、または、前記真空チャンバに所定流量のガスが流入している状態で前記圧力制御バルブを前記第2開度から前記第1開度に増加させた場合の前記圧力計測値の圧力下降時定数に基づいて、前記遅れ時定数を推定する。
さらに好ましい態様では、複数の異なる前記所定流量に対する複数の前記遅れ時定数を推定し、推定した複数の前記遅れ時定数に基づいて流量と遅れ時定数との相関関係または圧力と遅れ時定数との相関関係を推定する。
本発明の好ましい態様の圧力制御バルブは、前記推定装置を備え、前記推定装置で推定された前記プラントパラメータに基づいてバルブ開度を制御する。
本発明によれば、実際の装置条件を反映したより適切なプラントパラメータを推定することができる。
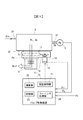
以下、図を参照して本発明を実施するための形態について説明する。図1は、本実施の形態の圧力制御バルブを用いた真空システムの概略構成を示すブロック図である。種々の反応プロセスが行われる真空チャンバ3には、排気系として圧力制御バルブ1のバルブ本体1aおよび真空ポンプ4が装着されている。図1では、真空ポンプ4にターボ分子ポンプが用いる場合を例に示したが、真空ポンプ4としてはターボ分子ポンプに限らず種々の真空ポンプを用いることができる。また、真空チャンバ3には、プロセスガス等のガスを流入させるためのガス流入部31、および、真空チャンバ3のチャンバ内圧力Pcを計測するための真空ゲージ5が設けられている。真空ゲージ5はゲージ配管51を介して真空チャンバ3に連通している。
圧力制御バルブ1は、真空チャンバ3のチャンバ排気口32に装着されるバルブ本体1aと、バルブ本体1aを駆動制御するバルブ制御装置1bとで構成される。バルブ本体1aには、バルブコンダクタンスを調整するための弁体11と、弁体11を駆動するモータ12と、弁体11の開度θを計測するためのエンコーダ13とが設けられている。バルブ制御装置1bは、開度制御部21、演算部22、記憶部23およびラーニング処理部24を備えている。弁体11の開度θはバルブ制御装置1bの開度制御部21によって制御される。
図1に示す例では、弁体11はモータ12によって揺動駆動される構成であるが、揺動駆動以外の構成の圧力制御バルブ1にも本発明は適用可能である。なお、開度θとは弁体11のフルストロークに対するパーセンテージを表すものであり、揺動駆動する弁体11の場合、全閉位置での揺動角度α0(=0deg)全開位置での揺動角度α1とすれば、揺動角度αにおける開度θ(%)はθ=100・α/(α1−α0)で算出される。
バルブ制御装置1bには、真空ゲージ5で計測された圧力計測値Pgと、エンコーダ13で計測された開度θrと、圧力指示値Psとが入力される。圧力指示値Psはチャンバ内圧力Pcをどのような値に設定すべきかを指示する情報であり、上位のコントローラ(例えば、真空システム全体を制御するコントローラ)から入力される。記憶部23には、バルブ制御に関するソフトウェアやデータが記憶される。なお、演算部22およびラーニング処理部24の詳細は後述する。
プロセス中は、所定流量Qin[Pa・L/sec]のプロセスガスをガス流入部31から真空チャンバ3内に流入させつつ、真空ポンプ4により真空チャンバ3内を排気し、かつ、弁体11の開度θを調整することで、チャンバ内圧力Pcを所望のプロセス圧力に維持する。弁体11の開度θを調整すると、バルブ本体1aと真空ポンプ4とで構成される排気系の実効排気速度が変化する。
ところで、バルブ制御装置1bの開度制御部21における調圧アルゴリズムには、次式(1)に示すような調圧の式が用いられる。式(1)において、Vcは真空チャンバ3の容積であり、S(Q,θ)は真空ポンプ4とバルブ本体1aとから成る排気系の排気速度である。真空ポンプ4の排気速度をSp(Q)、バルブコンダクタンスをCv(θ)とすると、排気系の排気速度S(Q,θ)は式「1/S(Q,θ)=1/Sp(Q)+1/Cv(θ)」と表される。圧力制御バルブ1による調圧精度を高めるためには、真空チャンバ3の容積Vcおよび排気系の排気速度S(Q,θ)を実際の真空システムに応じて精度良く求めておく必要がある。
Qin=Vc×(dPc/dt)+S(Q,θ)×Pc …(1)
Qin=Vc×(dPc/dt)+S(Q,θ)×Pc …(1)
そのために、一般には図1のような真空システムを組み上げた後に、ガスを流入させた状態で種々の開度θにおける圧力値を測定して、容積Vc等のプラントパラメータや、排気系を装置に装着した状態における排気速度S(Q,θ)を取得する、ラーニング処理を行う。ラーニングに関する一連の処理は、図1のバルブ制御装置1bのラーニング処理部24においてを行われる。
図2は、ラーニング処理手順の一例を示すフローチャートである。また、図3は、ラーニング処理時における開度θおよびチャンバ内圧力を示す図である。図3においてラインL1は開度θを示し、ラインL2は真空ゲージ5により計測される圧力計測値Pgを示す。なお、チャンバ内圧力Pcが安定した状態では、圧力値Pcは真空ゲージ5の圧力計測値Pgとほぼ一致するが、開度θを変更した直後は後述するようにチャンバ内圧力Pcの変化に対して圧力計測値Pgが遅れて変化する。図3では、真空ゲージ5の圧力計測値Pgをチャンバ内圧力として示している。
図2のステップS1では、所定流量Qinのガスをガス流入部31から真空チャンバ3内に流入させ、圧力計測値Pgが安定するまで待つ。所定流量Qinとしては、例えば、実際に行われるプロセス処理の代表的なガス流入量にほぼ近い流量に設定する。そのように設定することで、実際の使用状況と同様の条件における排気速度S(Q、θ)やプラントパラメータが取得できる。
ステップS2では、複数の開度θ(i)における圧力を取得する処理を行う。なお、i=1〜N(正の整数)である。図3に示す例では、θ=100%であって圧力計測値Pgが安定している時刻t1において、開度θを100%からθ(1)=0%へと変更する。開度変更により圧力計測値Pgは上昇するが、圧力計測値Pgが安定してほぼ一定値となったならば、真空ゲージ5の圧力計測値Pg(1)を取得する。取得時にはチャンバ内圧力Pcは安定しているので、ほぼPc=Pgとなっている。同様に、複数の開度θ(2),θ(3),・・・,θ(N)=100%に対して圧力計測値Pg(2),Pg(3),・・・,Pg(N)を取得する。
ステップS3では、図3の時刻taにおいて開度θを100%→0%と変更し、その後の圧力計測値Pgの変化から圧力上昇時定数Tupを計測する。圧力上昇時定数Tupとは、時刻taからの圧力上昇が、圧力安定時の圧力差ΔPgに対して約0.63ΔPgとなるまでの時間である。さらに、時刻tbにおいて開度θを0%→100%と変更し、その後の圧力計測値Pgの変化から圧力下降時定数Tdownを計測する。圧力下降時定数Tdownとは、時刻tbからの圧力下降が、圧力安定時の圧力降下の約63%となるまでの時間である。
ステップS4では、ステップS2で取得した流量Qinと開度θ(1)〜θ(N)における圧力計測値Pg(2)〜Pg(N)とに基づいて、流量Qinの場合における排気系の排気速度S(Qin,θ(i))を式(2)により演算する。ただし、i=1〜Nである。
S(Qin,θ(i))=Qin/Pc(i) …(2)
S(Qin,θ(i))=Qin/Pc(i) …(2)
ステップS5では、ステップS3で取得した圧力上昇時定数Tupおよび圧力下降時定数Tdownに基づいて、プラントパラメータを演算する。なお、ステップS4およびS5の演算はバルブ制御装置1bの演算部22(図1参照)において行われる。
(プラントパラメータの演算)
図1に示すように、真空ゲージ5はコンダクタンスCgのゲージ配管51を介して真空チャンバ3と連通しているので、圧力計測値Pgはチャンバ内圧力Pcの変化に対して時間的に遅れて変化することになる。例えば、Pc=Pgの定常状態からチャンバ内圧力Pcが上昇した場合、時間Δtの間にゲージ配管51を介して真空チャンバ3側から真空ゲージ5側へ流入するガス量ΔQgは、ゲージ配管51を含むゲージコンダクタンスをCgとすると次式(3)で表される。真空チャンバ3側から真空ゲージ5側へのガスの流入は、再びPc=Pgとなるまで続く。
ΔQg=(Pc−Pg)Cg・Δt …(3)
図1に示すように、真空ゲージ5はコンダクタンスCgのゲージ配管51を介して真空チャンバ3と連通しているので、圧力計測値Pgはチャンバ内圧力Pcの変化に対して時間的に遅れて変化することになる。例えば、Pc=Pgの定常状態からチャンバ内圧力Pcが上昇した場合、時間Δtの間にゲージ配管51を介して真空チャンバ3側から真空ゲージ5側へ流入するガス量ΔQgは、ゲージ配管51を含むゲージコンダクタンスをCgとすると次式(3)で表される。真空チャンバ3側から真空ゲージ5側へのガスの流入は、再びPc=Pgとなるまで続く。
ΔQg=(Pc−Pg)Cg・Δt …(3)
ゲージ配管51を含む真空ゲージ5側の容積をVgとすると、ガス流入量ΔQgによる圧力計測値Pgの増加ΔPgは次式(4)で表され、圧力計測値Pgの時間変化は式(5)のように表される。Pc>Pgのときには圧力計測値Pgは上昇し、Pc<Pgのときには圧力計測値Pgは低下する。そして、圧力計測値Pgが上昇または低下してPc=Pgの状態になると、圧力計測値Pgは一定となる。式(5)においてPc=一定と仮定すると、圧力計測値Pgは時定数Cg/Vg[sec]の一次遅れ系となる。
ΔPg={(Pc−Pg)Cg/Vg}・Δt …(4)
dPg/dt=(Pc−Pg)Cg/Vg …(5)
ΔPg={(Pc−Pg)Cg/Vg}・Δt …(4)
dPg/dt=(Pc−Pg)Cg/Vg …(5)
一方、チャンバ内圧力Pcに関しては、図1に示すようにバルブコンダクタンスがCvで、チャンバ内圧力Pcに対して真空ポンプ4の吸気口圧力をPpとした場合、真空チャンバ3から排出されるガスの流量Qoutは次式(6)で表される。真空チャンバ3へのガス流入量をQinとすれば、時間Δtにおけるチャンバ内圧力Pcの増加ΔPcは次式(7)で算出されるので、チャンバ内圧力Pcの時間変化は式(8)のように表される。ここでQin、Ppを一定とすると、チャンバ内圧力Pcは時定数Cv/Vc[sec]の一次遅れ系となる。
Qout=Cv(Pc−Pp) …(6)
ΔPc={(Qin−Qout)/Vc}・Δt …(7)
dPc/dt=−(Cv/Vc)Pc+Qin/Vc+(Cv/Vc)Pp …(8)
Qout=Cv(Pc−Pp) …(6)
ΔPc={(Qin−Qout)/Vc}・Δt …(7)
dPc/dt=−(Cv/Vc)Pc+Qin/Vc+(Cv/Vc)Pp …(8)
前述した式(5)を時間微分すると式(9)となり、式(9)のdPc/dtは式(8)を変形した式(10)の右辺のように表され、式(10)の右辺のPcは式(5)を変形した式(11)の右辺のように表される。
(Vg/Cg)d2Pg/dt2=dPc/dt−dPg/dt …(9)
dPc/dt=Qin/Vc−(Cv/Vc)(Pc−Pp) …(10)
Pc=(Vg/Cg)dPg/dt+Pg …(11)
(Vg/Cg)d2Pg/dt2=dPc/dt−dPg/dt …(9)
dPc/dt=Qin/Vc−(Cv/Vc)(Pc−Pp) …(10)
Pc=(Vg/Cg)dPg/dt+Pg …(11)
よって、式(10)、(11)から次式(12)が得られ、式(12)を式(9)に代入すると、圧力計測値Pgに関する式(13)が得られる。
dPc/dt=Qin/Vc
−(Cv/Vc){(Vg/Cg)dPg/dt+Pg−Pp} …(12)
(Vc/Cv)(Vg/Cg)d2Pg/dt2+{(Vc/Cv)+(Vg/Cg)}dPg/dt
=Qin/Cv+Pp−Pg …(13)
dPc/dt=Qin/Vc
−(Cv/Vc){(Vg/Cg)dPg/dt+Pg−Pp} …(12)
(Vc/Cv)(Vg/Cg)d2Pg/dt2+{(Vc/Cv)+(Vg/Cg)}dPg/dt
=Qin/Cv+Pp−Pg …(13)
式(13)において(d2Pg/dt2)を含む2次の項を無視すると、式(13)は次式(14)で近似でき、圧力計測値Pgは{(Vc/Cv)+(Vg/Cg)}のような時定数を持つ一次遅れ系とみなすことができる。式(14)において、dPg/dtの係数の内、(Vc/Cv)はチャンバ内圧力Pcの時定数に対応している。一方、(Vg/Cg)はPc=一定と仮定した場合の圧力計測値Pgの時定数に対応しており、チャンバ内圧力Pcに対する圧力計測値Pgの遅れを表す時定数である。
{(Vc/Cv)+(Vg/Cg)}dPg/dt=Qin/Cv+Pp−Pg …(14)
{(Vc/Cv)+(Vg/Cg)}dPg/dt=Qin/Cv+Pp−Pg …(14)
ここでは、次のようなプラントモデルでシミュレーション計算した。
・Vc:チャンバ容積[L]=40[L]
・Cv(0):開度0%のバルブコンダクタンス=12.66[L/sec]
・Cv(100):開度100%のバルブコンダクタンス=3000[L/sec]
・Vg:真空ゲージ容積[L]=0.34[L]
・Cg:真空ゲージコンダクタンス[L/sec]=0.8[L/sec]
・Qin:ラーニング時のガス流量(アルゴンガス)=200[sccm]
=2534[mtorr・L/sec]
=338[Pa・L/sec]
・Vc:チャンバ容積[L]=40[L]
・Cv(0):開度0%のバルブコンダクタンス=12.66[L/sec]
・Cv(100):開度100%のバルブコンダクタンス=3000[L/sec]
・Vg:真空ゲージ容積[L]=0.34[L]
・Cg:真空ゲージコンダクタンス[L/sec]=0.8[L/sec]
・Qin:ラーニング時のガス流量(アルゴンガス)=200[sccm]
=2534[mtorr・L/sec]
=338[Pa・L/sec]
図4は開度θを100%→0%と変化させた場合のシミュレーション結果を示し、図5は開度θを0%→100%と変化させた場合のシミュレーション結果を示す。図4,5のいずれにおいても、(a)は圧力Pc,Pgを示し、(b)は開度指令値と開度計測値を示し、(c)はバルブコンダクタンスCvを示す。
図4(a)において、ラインL10はチャンバ内圧力Pcの変化を示し、ラインL11は真空ゲージ5の圧力計測値Pgを示す。図4(b)において、ラインL12は開度指令値を示し、ラインL13は実際の開度変化を表している。時刻taにおいて開度指令値が100%→0%と変化するが、ラインL13に示すように実際に開度θが0%となるのは時刻taよりも後の時刻ta1となる。
図4(a)の圧力計測値PgのラインL11の圧力が0.63ΔPc(=0.63ΔPg)となるまでの時間が、上述した圧力上昇時定数Tupである。チャンバ内圧力PcのラインL10の圧力が上述した0.63ΔPcとなるまでの時間が、チャンバ内圧力Pcの時定数(Vc/Cv)である。そして、圧力上昇時定数Tupから時定数(Vc/Cv)を差し引いた時間が、圧力計測値Pgの時定数(Vg/Cg)である。
図5(a)において、ラインL20はチャンバ内圧力Pcの変化を示し、ラインL21は真空ゲージ5の圧力計測値Pgを示す。図5(b)において、ラインL22は開度指令値を示し、ラインL23は実際の開度変化を表している。時刻tbにおいて開度指令値が0%→100%と変化するが、ラインL23に示すように実際に開度θが100%となるのは時刻tbよりも後の時刻tb1となる。
図5(a)のラインL21の圧力減少値が0.63ΔPc(=0.63ΔPg)となるまでの時間が、上述した圧力下降時定数Tdownである。チャンバ内圧力PcのラインL20の圧力減少値が0.63ΔPcとなるまでの時間が、チャンバ内圧力Pcの時定数(Vc/Cv)である。そして、圧力下降時定数Tdownから時定数(Vc/Cv)を差し引いた時間が、圧力計測値Pgの時定数(Vg/Cg)である。
(チャンバ容積Vcの推定)
図4(a)に示す圧力上昇時定数Tupは開度θが0%の時のラインL11から求まるので、次式(15)で表される。一方、図5(a)に示す圧力下降時定数Tdownは開度θが100%の時のラインL21から求まるので、次式(16)で表される。式(15),(16)から差分=Tup−Tdownは式(17)のようになる。ここで、Vc/Cv(0)と比べてVc/Cv(100)は十分に小さいので式(17)の右辺第2項を無視すると、真空チャンバ3の容積Vcは式(18)で算出されることになる。
Tup=Vc/Cv(0)+Vg/Cg …(15)
Tdown=Vc/Cv(100)+Vg/Cg …(16)
Tup−Tdown=Vc/Cv(0)−Vc/Cv(100) …(17)
Vc=Cv(0)・(Tup−Tdown) …(18)
図4(a)に示す圧力上昇時定数Tupは開度θが0%の時のラインL11から求まるので、次式(15)で表される。一方、図5(a)に示す圧力下降時定数Tdownは開度θが100%の時のラインL21から求まるので、次式(16)で表される。式(15),(16)から差分=Tup−Tdownは式(17)のようになる。ここで、Vc/Cv(0)と比べてVc/Cv(100)は十分に小さいので式(17)の右辺第2項を無視すると、真空チャンバ3の容積Vcは式(18)で算出されることになる。
Tup=Vc/Cv(0)+Vg/Cg …(15)
Tdown=Vc/Cv(100)+Vg/Cg …(16)
Tup−Tdown=Vc/Cv(0)−Vc/Cv(100) …(17)
Vc=Cv(0)・(Tup−Tdown) …(18)
式(18)に実際に計測されたTup=3.72[sec]およびTdown=0.540[sec]を代入すると、容積VcはVc=12.66×(3.72−0.54)=40.25[L]と算出される。シミュレーションではVc=40[L]としているので、40[L]に近い算出値が得られた。式(18)のCv(0)としては、予め記憶部23に記憶されているバルブコンダクタンスデータを用いても良いし、図3のようにラーニングにおいてバルブコンダクタンスデータも同時に取得するような場合には、ラーニングにより取得されたCv(0)値を用いても良い。また、Tup,TdownにはステップS3で計測されたTup,Tdownを使用する。算出された容積Vcは図1の記憶部23に記憶される。
(圧力計測値の遅れ時定数Vg/Cgの推定)
時定数Vg/Cgは、例えば、式(16)に基づく次式(19)で算出することができる。式(19)のVcおよびCv(100)については、予め記憶されているチャンバ容積およびバルブコンダクタンスのデータを用いても良いし、ラーニングにより取得されたVc値およびCv(100)値を用いても良い。また、Tdownには図2のステップS3で計測された値が用いられる。なお、Tmdはモータムダ時間(motor delay time)であり、例えば、実際のモータ特性に基づいて設定される。また、Vg/Cg=0としてモデルを作製した場合のTdown値を用いても良い。
Vg/Cg=Tdown−Vc/Cv(100)−Tmd …(19)
時定数Vg/Cgは、例えば、式(16)に基づく次式(19)で算出することができる。式(19)のVcおよびCv(100)については、予め記憶されているチャンバ容積およびバルブコンダクタンスのデータを用いても良いし、ラーニングにより取得されたVc値およびCv(100)値を用いても良い。また、Tdownには図2のステップS3で計測された値が用いられる。なお、Tmdはモータムダ時間(motor delay time)であり、例えば、実際のモータ特性に基づいて設定される。また、Vg/Cg=0としてモデルを作製した場合のTdown値を用いても良い。
Vg/Cg=Tdown−Vc/Cv(100)−Tmd …(19)
なお、式(19)に代えて、式(15)に基づく次式(20)により時定数Vg/Cgを推定しても良い。ただし、式(15)を使用する場合、図4(a)からもわかるようにTupおよびVc/Cv(0)の値が近接しているので、測定誤差の影響を受けやすい。
Vg/Cg=Tup−Vc/Cv(0)−Tmd …(20)
Vg/Cg=Tup−Vc/Cv(0)−Tmd …(20)
ところで、時定数Vg/CgにおけるCgはゲージ配管51を含むゲージコンダクタンスであり、一般には圧力Pc,Pgに依存して変化すると考えられる。そこで、図2に示したラーニングにおいて2種類以上のQinに対して時定数Vg/Cgをそれぞれ算出し、プロセス中の真空条件(流量Qinや圧力計測値Pgなど)に応じて時定数Vg/Cgの値を設定するようにしても良い。
図6は、圧力領域と配管コンダクタンスCとの関係を示す模式図であり、チャンバ内圧力PcとゲージコンダクタンスCgとの間にも同様の関係が成り立つ。一般的に、配管コンダクタンスCの特性は圧力領域によって異なる。配管コンダクタンスCは、図6のラインL30で示すように圧力領域によって傾向が異なり、分子流量域ではほぼ一定であるが、中間流領域、粘性流量域と圧力が高くなるほど(すなわち低真空になるほど)値が大きくなる傾向となる。そのため、ラーニングを複数の流量Qinについて行い、複数の流量Qinに対して複数の時定数Vg/Cgを得ることで、時定数Vg/Cgを用いた制御をより最適に行うことができる。
例えば、複数の流量Q1,Q2,Q3に対して時定数Vg/Cgをそれぞれ算出し、その算出結果に基づいて図6のラインL31のような時定数Vg/Cgと圧力Pとの相関を取得する。なお、式(19)における圧力下降時定数Tdownを測定する際には、流量Qは一定でも圧力計測値Pgは図5(a)に示すように変化している。そのため、各流量Q1,Q2,Q3に対応する圧力値P1,P2,P3としては、例えば、θ=0%のときの圧力P(0)とθ=100%のときの圧力P(100)の平均値を採用すれば良い。そして、圧力計測値PgがP1であった場合には時定数Vg/Cg1が用いられ、圧力計測値PgがP2であった場合には時定数Vg/Cg2が用いられ、圧力計測値PgがP3であった場合には時定数Vg/Cg3が用いられる。算出された時定数Vg/Cgや相関(ラインL31)は、図1に示す記憶部23に記憶される。
上述した実施形態で説明した圧力制御バルブをまとめて説明すると以下のとおりである。
(C1)図1に示す演算部22は、真空チャンバ3のプラントパラメータ(例えば、真空チャンバ3の容積Vcや時定数Vg/Cg)を推定する。演算部22は、真空チャンバ3に所定流量Qinのガスが流入している状態で圧力制御バルブ1を第1開度から第2開度に減少させた場合の圧力計測値Pgの圧力上昇時定数Tupと、真空チャンバ3に所定流量Qinのガスが流入している状態で圧力制御バルブ1を第2開度から第1開度に増加させた場合の圧力計測値Pgの圧力下降時定数Tdownとに基づいて、真空チャンバ3の容積Vcを推定する。その結果、真空チャンバ3の容積Vcを正確に推定することができ、バルブ制御をより適切に行うことができる。
(C1)図1に示す演算部22は、真空チャンバ3のプラントパラメータ(例えば、真空チャンバ3の容積Vcや時定数Vg/Cg)を推定する。演算部22は、真空チャンバ3に所定流量Qinのガスが流入している状態で圧力制御バルブ1を第1開度から第2開度に減少させた場合の圧力計測値Pgの圧力上昇時定数Tupと、真空チャンバ3に所定流量Qinのガスが流入している状態で圧力制御バルブ1を第2開度から第1開度に増加させた場合の圧力計測値Pgの圧力下降時定数Tdownとに基づいて、真空チャンバ3の容積Vcを推定する。その結果、真空チャンバ3の容積Vcを正確に推定することができ、バルブ制御をより適切に行うことができる。
なお、上述した実施の形態では第1開度をθ=100%とし第2開度をθ=0%としたが、圧力上昇時定数Tupおよび圧力下降時定数Tdownを取得する際の開度設定値はこれに限らず、第1開度>第2開度であれば種々の開度が可能である。ただし、第1開度と第2開度との差をより大きく設定するほど、時定数TupおよびTdownをより精度良く計測することができる。
(C2)また、チャンバ内圧力Pcに対する圧力計測値Pgの遅れ時定数Vg/Cgを推定する場合には、式(19),(20)のように真空チャンバ3に所定流量Qinのガスが流入している状態で圧力制御バルブ1を第1開度(例えば、開度100%)から第2開度(例えば、開度0%)に減少させた場合の圧力上昇時定数Tup、または、真空チャンバ3に所定流量Qinのガスが流入している状態で圧力制御バルブ1を第2開度(例えば、開度0%)から第1開度(例えば、開度100%)に増加させた場合の圧力下降時定数Tdownに基づいて推定することができる。このように推定された時定数Vg/Cgを用いることで、チャンバ内圧力Pcに対する圧力計測値Pgの遅れを考慮したより正確なバルブ制御を行うことができる。
(C3)さらに、図6に示したように、複数の異なる所定流量Q1,Q2,Q3に対する複数の遅れ時定数Vg/Cg1,Vg/Cg2,Vg/Cg3を推定し、それらの遅れ時定数に基づいてラインL31に示すような相関関係を推定するようにしても良い。ラインL31は、流量Qと遅れ時定数(Vg/Cg)との相関としても表現できるし、圧力Pと遅れ時定数(Vg/Cg)との相関としても表現できる。なお、複数の異なる所定流量は3に限らず2以上であればいくつでも良い。
(C4)また、圧力制御バルブ1は、演算部22で推定されたプラントパラメータ(容積Vcや時定数Vg/Cg)に基づいてバルブ開度(弁体11の開度)を制御する。それにより、チャンバ内圧力Pcに対する圧力計測値Pgの遅れを考慮したより正確なバルブ制御を行うことができる。なお、図1に示す例では、圧力制御バルブ1のバルブ制御装置1bの演算部22でプラントパラメータの推定を行う構成としたが、プラントパラメータを推定する推定装置を圧力制御バルブ1とは別個に設けても良いし、図1に示す真空システムのコントローラにおいてプラントパラメータの推定を行うようにしても良い。
なお、上述した実施の形態では、Qoutを式(6)のように表し、チャンバ内圧力Pcの時定数をVc/CvのようにバルブコンダクタンスCvを用いて表現したが、バルブコンダクタンスCvに代えて排気系の排気速度S(Q,θ)を用いてVc/S(Q,θ)としても良い。排気速度S(Q,θ)は、バルブコンダクタンスをCv(θ)と真空ポンプの排気速度Sp(Q)を用いて「1/S(Q,θ)=1/Sp(Q)+1/Cv(θ)」と表される。
バルブコンダクタンスCvに代えて排気系の排気速度S(Q,θ)を用いる場合、Qoutは次式(21)のように表され、式(8)は次式(22)で置き換えられる。そのため、チャンバ内圧力Pcの時定数はVc/S(Q,θ)と表される。
Qout=S(Q,θ)・Pc …(21)
dPc/dt=−(S(Q,θ)/Vc)Pc+Qin/Vc …(22)
Qout=S(Q,θ)・Pc …(21)
dPc/dt=−(S(Q,θ)/Vc)Pc+Qin/Vc …(22)
上記では、種々の実施の形態および変形例を説明したが、本発明はこれらの内容に限定されるものではない。本発明の技術的思想の範囲内で考えられるその他の態様も本発明の範囲内に含まれる。
1…圧力制御バルブ、1a…バルブ本体、1b…バルブ制御装置、3…真空チャンバ、5…真空ゲージ、21…開度制御部、22…演算部、23…記憶部、24…ラーニング処理部、51…ゲージ配管、
Claims (4)
- チャンバ内圧力を計測する真空計を備えると共に圧力制御バルブを介して排気される真空チャンバのプラントパラメータを推定する推定装置であって、
前記プラントパラメータは前記真空チャンバの容積を含み、
前記真空チャンバに所定流量のガスが流入している状態で前記圧力制御バルブを第1開度から第2開度に減少させた場合の前記真空計の圧力計測値の圧力上昇時定数と、前記真空チャンバに前記所定流量のガスが流入している状態で前記圧力制御バルブを前記第2開度から前記第1開度に増加させた場合の前記真空計の圧力計測値の圧力下降時定数とに基づいて、前記容積を推定する、推定装置。 - チャンバ内圧力を計測する真空計を備えると共に圧力制御バルブを介して排気される真空チャンバのプラントパラメータを推定する推定装置であって、
前記プラントパラメータは、前記チャンバ内圧力に対する前記真空計の圧力計測値の遅れ時定数を含み、
前記真空チャンバに所定流量のガスが流入している状態で前記圧力制御バルブを第1開度から第2開度に減少させた場合の前記圧力計測値の圧力上昇時定数、または、前記真空チャンバに所定流量のガスが流入している状態で前記圧力制御バルブを前記第2開度から前記第1開度に増加させた場合の前記圧力計測値の圧力下降時定数に基づいて、前記遅れ時定数を推定する、推定装置。 - 請求項2に記載の推定装置において、
複数の異なる前記所定流量に対する複数の前記遅れ時定数を推定し、推定した複数の前記遅れ時定数に基づいて流量と遅れ時定数との相関関係または圧力と遅れ時定数との相関関係を推定する、推定装置。 - 請求項1から請求項3までのいずれか一項に記載の推定装置を備え、
前記推定装置で推定された前記プラントパラメータに基づいてバルブ開度を制御する、圧力制御バルブ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018129154A JP2020009111A (ja) | 2018-07-06 | 2018-07-06 | 推定装置および圧力制御バルブ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018129154A JP2020009111A (ja) | 2018-07-06 | 2018-07-06 | 推定装置および圧力制御バルブ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020009111A true JP2020009111A (ja) | 2020-01-16 |
Family
ID=69151678
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018129154A Pending JP2020009111A (ja) | 2018-07-06 | 2018-07-06 | 推定装置および圧力制御バルブ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020009111A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114542779A (zh) * | 2020-11-26 | 2022-05-27 | 株式会社岛津制作所 | 真空阀及推断装置 |
-
2018
- 2018-07-06 JP JP2018129154A patent/JP2020009111A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114542779A (zh) * | 2020-11-26 | 2022-05-27 | 株式会社岛津制作所 | 真空阀及推断装置 |
| US11551952B2 (en) | 2020-11-26 | 2023-01-10 | Shimadzu Corporation | Vacuum valve, method of controlling vacuum valve, and estimation device |
| CN114542779B (zh) * | 2020-11-26 | 2023-05-23 | 株式会社岛津制作所 | 真空阀及推断装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4102564B2 (ja) | 改良型圧力式流量制御装置 | |
| JP6828446B2 (ja) | バルブ制御装置 | |
| JP5087073B2 (ja) | 性能を最適化した圧力制御システム | |
| US7881829B2 (en) | Mass flow controller | |
| TWI437399B (zh) | Pressure control method and pressure control device for vacuum container | |
| CN109630446B (zh) | 气体推断装置及真空排气装置 | |
| JP6729317B2 (ja) | ポンプ状態推定装置およびターボ分子ポンプ | |
| JP7238461B2 (ja) | バルブ制御装置および真空バルブ | |
| JP6311087B1 (ja) | 真空バルブの制御方法 | |
| US11378073B2 (en) | Estimation device and valve control device | |
| CN110307388B (zh) | 目标开度推断器以及压力调整真空阀 | |
| JP2020009111A (ja) | 推定装置および圧力制御バルブ | |
| JP2020021476A (ja) | バルブ制御装置および圧力制御バルブ | |
| JP2018112932A (ja) | バルブ制御装置 | |
| CN114545983A (zh) | 流量控制装置、流量控制方法以及程序存储介质 | |
| US11326914B2 (en) | Flow rate measurement apparatus and method for more accurately measuring gas flow to a substrate processing system | |
| JP2021189514A (ja) | マスフローコントローラおよびハンチング抑制方法 | |
| JP7517109B2 (ja) | 真空バルブおよび推定装置 | |
| JP2009282819A (ja) | 流量制御方法 | |
| JP2019049283A (ja) | ガス充填装置およびガス充填方法 | |
| US20210263540A1 (en) | Method and apparatus for measuring gas flow | |
| JP7227024B2 (ja) | 流量制御システム、流量制御方法、及び流量制御プログラム | |
| CN112763178B (zh) | 可自动提前中止的高超声速风洞调节阀开度预置方法 | |
| JPH10273765A (ja) | 溶融めっきの付着量制御方法および装置 | |
| CN118502500A (zh) | 压力自适应控制方法、装置及相关设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210812 |