JP2019166323A - 回転式組織切断制御装置 - Google Patents
回転式組織切断制御装置 Download PDFInfo
- Publication number
- JP2019166323A JP2019166323A JP2019053199A JP2019053199A JP2019166323A JP 2019166323 A JP2019166323 A JP 2019166323A JP 2019053199 A JP2019053199 A JP 2019053199A JP 2019053199 A JP2019053199 A JP 2019053199A JP 2019166323 A JP2019166323 A JP 2019166323A
- Authority
- JP
- Japan
- Prior art keywords
- radial actuator
- drive shaft
- bevel gear
- cutting
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/3201—Scissors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/32053—Punch like cutting instruments, e.g. using a cylindrical or oval knife
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320016—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes
- A61B17/32002—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes with continuously rotating, oscillating or reciprocating cutting instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B17/320758—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions with a rotating cutting instrument, e.g. motor driven
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/3209—Incision instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Animal Behavior & Ethology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Vascular Medicine (AREA)
- Pathology (AREA)
- Surgical Instruments (AREA)
Abstract
Description
本出願は、その内容全体が参照により本明細書に援用される、本明細書と共に出願され、代理人整理番号ORA0106US1が付された同時係属出願「回転式組織切断装置」に関連する。
101 軸
103 第1の方向
105 第2の方向
111 切断装置
140 駆動シャフトアセンブリ
150 制御装置
160 ハウジング
170 位置調節装置
180 回転把持部
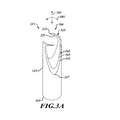
211 切断部材
214 内側切断面
221 アンカー先端部
241 内側切断面
251 外側切断部材
271 外側切断面
290 遠位端
292 切断領域
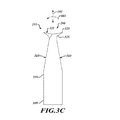
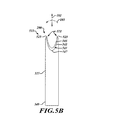
315 本体
321 アンカー先端部
323 穿孔端部
325 固定表面
343 前方切断縁部
345 後方切断縁部
347 下端
349 近位端
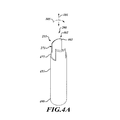
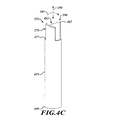
455 本体
461 先端部
463 端部
471 外側切断面
473 前方切断縁部
475 後方切断縁部
477 下端
499 近位端
511 内側切断部材
515 本体
521 凹状アンカー先端部
523 穿孔端部
541 内側切断面
543 前縁部
545 後縁部
547 下端
549 近位端
601 組織
607 方向
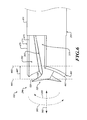
772 スリーブ
774 第1の端部
776 シースロック
777 係合溝
778 シースロッキングポート
779 第1の端部
781 ユーザグリップ
782 インターフェース
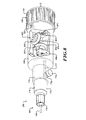
801 第1の端部
802 逆回転機構
812 第1の差動アクチュエータ
814 第1のベベルギア
852 第2の差動アクチュエータ
854 第2のベベルギア
892 トランスファーギア
894 差動ベベルギア
896 シャーシ
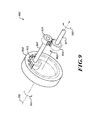
902 逆回転機構
907 第1のシャフト
914 ベースギア
915 第1のトランスファーギア
919 第2のトランスファーギア
950 制御機構
954 逆回転ギア
957 第2のシャフト
992 アクスル
1050 制御装置
1082 第1の回転グリップ
1083 第1の方向
1084 第2の回転グリップ
1085 第2の方向
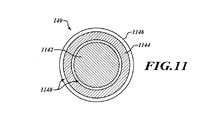
1142 第1の駆動シャフト
1144 第2の駆動シャフト
1146 シース
1148 間隙
Claims (20)
- 逆回転可能な切断装置を制御するための装置であって、
第1の駆動シャフトに係合するように構成された第1のラジアルアクチュエータと、
第2の駆動シャフトに係合するように構成された第2のラジアルアクチュエータであって、前記第2の駆動シャフトが、前記第1の駆動シャフトと同軸状に配設されている、第2のラジアルアクチュエータと、
前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを支持し、前記第1の駆動シャフト及び前記第2の駆動シャフトが内部を通って延在することを可能にするハウジングであって、前記第1の駆動シャフト及び前記第2の駆動シャフトが、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータのうちの少なくとも一方の回転に応じて相対的に逆回転可能である、ハウジングと、を備える、装置。 - 前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを機械的に連結する逆回転機構を更に備え、前記逆回転機構は、前記第1のラジアルアクチュエータが第1の方向に回転されるときに、前記第2のラジアルアクチュエータを第2の方向に回転させるように構成されている、請求項1に記載の装置。
- 前記逆回転機構が、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを逆回転式に連結する複数のギアを含み、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータが、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータの少なくとも一方の回転に応じて同時に逆回転可能である、請求項2に記載の装置。
- 前記複数のギアが、複数のスパーギアを含む、請求項3に記載の装置。
- 前記逆回転機構が、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを異なる回転速度で逆回転させる、前記第1のラジアルアクチュエータと前記第2のラジアルアクチュエータとの間に機械的に連結されたギア差動装置を含む、請求項3に記載の装置。
- 前記逆回転機構が、
前記第1のラジアルアクチュエータに連結された第1のベベルギアであって、前記第1のベベルギアの第1の斜面が、前記第2のラジアルアクチュエータに面している、第1のベベルギアと、
前記第2のラジアルアクチュエータに連結された第2のベベルギアであって、前記第2のベベルギアの第2の斜面が、前記第1のラジアルアクチュエータに面している、第2のベベルギアと、
前記第1のベベルギアの前記第1の斜面及び前記第2のベベルギアの前記第2の斜面に係合するように構成された差動ベベルギアと、を備える、請求項3に記載の装置。 - 前記ハウジングから半径方向に延在し、前記第1のラジアルアクチュエータに固定可能に連結された第1の回転制御装置を更に備え、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータが、前記第1の回転制御装置の回転に応じて同時に逆回転可能である、請求項2に記載の装置。
- 前記ハウジングから半径方向に延在し、前記第1のラジアルアクチュエータに固定可能に連結された第2の回転制御装置と、前記ハウジングから半径方向に延在し、前記第2のラジアルアクチュエータに固定可能に連結された第3の回転制御装置と、を更に備え、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータが、前記第2の回転制御装置及び前記第3の回転制御装置の逆回転に応じて逆回転可能である、請求項1に記載の装置。
- 前記第1の駆動シャフト及び前記第2の駆動シャフトが、フレキシブルシャフトを含む、請求項1に記載の装置。
- 逆回転可能な切断装置を制御するための装置であって、
第1の駆動シャフトに係合するように構成された第1のラジアルアクチュエータと、
第2の駆動シャフトに係合するように構成された第2のラジアルアクチュエータであって、前記第2の駆動シャフトが、前記第1の駆動シャフトと同軸状に配設されている、第2のラジアルアクチュエータと、
前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを機械的に連結する逆回転機構であって、前記第1のラジアルアクチュエータが第1の方向に回転されるときに、前記第2のラジアルアクチュエータを第2の方向に回転させるように構成されている、逆回転機構と、
前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを支持し、前記第1の駆動シャフト及び前記第2の駆動シャフトが内部を通って延在することを可能にする、ハウジングと、
前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを支持し、前記第1の駆動シャフト及び前記第2の駆動シャフトを収容するシースが内部を通って延在することを可能にするように構成されている、ハウジングと、
前記第1のラジアルアクチュエータに機械的に連結されて、前記第1のラジアルアクチュエータの回転を可能にする回転制御装置であって、前記第1の駆動シャフト及び前記第2の駆動シャフトが、前記第1の回転制御装置の回転に応じて同時に逆回転可能である、回転制御装置と、を備える、装置。 - 前記逆回転機構が、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを逆回転式に連結する複数のギアを含み、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータが、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータのうちの少なくとも一方の回転に応じて同時に逆回転可能である、請求項10に記載の装置。
- 前記複数のギアが、複数のスパーギアを含む、請求項11に記載の装置。
- 前記逆回転機構が、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを異なる回転速度で逆回転させる、前記第1のラジアルアクチュエータと前記第2のラジアルアクチュエータとの間に機械的に連結されたギア差動装置を含む、請求項11に記載の装置。
- 前記逆回転機構が、
前記第1のラジアルアクチュエータに連結された第1のベベルギアであって、前記第1のベベルギアの第1の斜面が、前記第2のラジアルアクチュエータに面している、第1のベベルギアと、
前記第2のラジアルアクチュエータに連結された第2のベベルギアであって、前記第2のベベルギアの第2の斜面が、前記第1のラジアルアクチュエータに面している、第2のベベルギアと、
前記第1のベベルギアの前記第1の斜面及び前記第2のベベルギアの前記第2の斜面に係合するように構成された差動ベベルギアであって、前記第1のベベルギア及び前記第2のベベルギアが、前記回転制御装置の回転に応じて相対的に逆回転可能である、差動ベベルギアと、を含む、請求項11に記載の装置。 - 組織を切断するためのシステムであって、
駆動シャフトアセンブリであって、
第1の駆動シャフトと、
前記第1の駆動シャフトの周りに同軸状に配設され、前記第1の駆動シャフトとは独立して回転するように構成された第2の駆動シャフトと、
前記第1の駆動シャフト及び前記第2の駆動シャフトを収容するシースと、を含む、駆動シャフトアセンブリと、
前記第1の駆動シャフトに係合するように構成された第1のラジアルアクチュエータと、
前記第2の駆動シャフトに係合するように構成された第2のラジアルアクチュエータと、
前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを支持し、前記第1の駆動シャフト及び前記第2の駆動シャフトを収容する前記シースが内部を通って延在することを可能にする、ハウジングと、
前記第1のラジアルアクチュエータに機械的に連結されて、前記第2のラジアルアクチュエータに対する、前記第1のラジアルアクチュエータの回転を可能にする、回転制御装置と、
切断装置であって、
カッターの遠位端において少なくとも1つの第1の切断面を支持し、前記第1の駆動シャフトに機械的に連結された第1の円筒状体を有する内側切断部材であって、前記第1の切断面が、前記第1の円筒状体の軸に対して第1の回転方向に面し、前記第1の円筒状体の外周に第1の切断縁部を有する、内側切断部材と、
前記第1の円筒状体の周りに同心円状に配設され、前記第2の駆動シャフトに機械的に連結された第2の円筒状体を有する外側切断部材であって、前記外側切断部材が、前記装置の前記遠位端において少なくとも1つの第2の切断面を支持し、前記第2の切断面が、前記軸に対して第2の回転方向に面し、前記第2の円筒状体の内周に第2の切断縁部を有し、前記装置の前記遠位端の適用及び前記回転制御装置の回転に応じて、組織が、前記内側切断部材の前記第1の切断縁部と前記外側切断部材の前記第2の切断縁部との間で回転可能に切断可能である、外側切断部材と、を含む、切断装置と、を備える、システム。 - 前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを機械的に連結する逆回転機構を更に備え、前記逆回転機構は、前記第1のラジアルアクチュエータが第1の方向に回転されるときに、前記第2のラジアルアクチュエータを第2の方向に回転させるように構成されている、請求項15に記載のシステム。
- 前記逆回転機構が、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを逆回転式に連結する複数のギアを含み、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータが、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータのうちの少なくとも一方の回転に応じて同時に逆回転可能である、請求項16に記載のシステム。
- 前記複数のギアが、複数のスパーギアを含む、請求項17に記載のシステム。
- 前記逆回転機構が、前記第1のラジアルアクチュエータ及び前記第2のラジアルアクチュエータを異なる回転速度で逆回転させる、前記第1のラジアルアクチュエータと前記第2のラジアルアクチュエータとの間に機械的に連結されたギア差動装置を含む、請求項17に記載のシステム。
- 前記逆回転機構が、
前記第1のラジアルアクチュエータに連結された第1のベベルギアであって、前記第1のベベルギアの第1の斜面が、前記第2のラジアルアクチュエータに面している、第1のベベルギアと、
前記第2のラジアルアクチュエータに連結された第2のベベルギアであって、前記第2のベベルギアの第2の斜面が、前記第1のラジアルアクチュエータに面している、第2のベベルギアと、
前記第1のベベルギアの前記第1の斜面及び前記第2のベベルギアの前記第2の斜面に係合するように構成された差動ベベルギアと、を備える、請求項17に記載のシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/933,363 US10779850B2 (en) | 2018-03-22 | 2018-03-22 | Rotational tissue cutting control device |
| US15/933,363 | 2018-03-22 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019166323A true JP2019166323A (ja) | 2019-10-03 |
| JP7361480B2 JP7361480B2 (ja) | 2023-10-16 |
Family
ID=66381261
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019053199A Active JP7361480B2 (ja) | 2018-03-22 | 2019-03-20 | 回転式組織切断制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10779850B2 (ja) |
| JP (1) | JP7361480B2 (ja) |
| CN (1) | CN110292417B (ja) |
| DE (1) | DE102019105534A1 (ja) |
| GB (1) | GB2573868B (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10687844B2 (en) * | 2018-11-14 | 2020-06-23 | Pavel Menn | Catheter atherector |
| US20210298725A1 (en) * | 2020-03-31 | 2021-09-30 | Gyrus Acmi, Inc. D/B/A Olympus Surgical Technologies America | Rotatable tissue sampling device |
| CN116407182A (zh) * | 2021-12-31 | 2023-07-11 | 杭州德诺电生理医疗科技有限公司 | 切线装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5618293A (en) * | 1995-06-06 | 1997-04-08 | Smith & Nephews Dyonics, Inc. | Surgical instrument |
| US20100204722A1 (en) * | 2007-05-18 | 2010-08-12 | Gilsdorf John B | Apparatus for cutting out and removing tissue cylinders from a tissue, and use thereof |
| JP2012520726A (ja) * | 2009-03-16 | 2012-09-10 | シー・アール・バード・インコーポレーテッド | 回転切断を有している生体組織検査装置 |
| JP2016168103A (ja) * | 2015-03-11 | 2016-09-23 | テルモ株式会社 | 異物除去デバイス |
| JP2019069141A (ja) * | 2017-10-09 | 2019-05-09 | ジャイラス・エーシーエムアイ・インコーポレーテッド | 組織切除装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5324300A (en) * | 1991-10-25 | 1994-06-28 | Elias Elias G | Device for the controlled excision of tissue from a living body |
| US8465491B2 (en) * | 2006-06-01 | 2013-06-18 | Osteo Innovations Llc | Bone drill |
| DE102007023207A1 (de) * | 2007-05-18 | 2008-11-20 | Wisap Gesellschaft für wissenschaftlichen Apparatebau mbH | Vorrichtung zum Ausschneiden und Entfernen von Gewebezylindern aus einem Gewebe und deren Verwendung |
| DE102008036420A1 (de) * | 2008-08-05 | 2010-02-11 | Wisap Gesellschaft für wissenschaftlichen Apparatebau mbH | Vorrichtung zum Ausschneiden und Entfernen von Gewebezylindern aus einem Gewebe und deren Verwendung |
| ES2633808T3 (es) * | 2009-04-07 | 2017-09-25 | Doheny Eye Institute | Dispositivo de facomorcelación manual desechable |
| DE102011100278A1 (de) * | 2011-04-28 | 2012-10-31 | C. & E. Fein Gmbh | Bohrmaschine, insbesondere handgeführte Bohrmaschine |
| CN204121083U (zh) * | 2014-09-28 | 2015-01-28 | 丁轶人 | 腹腔镜专用取脾器 |
-
2018
- 2018-03-22 US US15/933,363 patent/US10779850B2/en active Active
-
2019
- 2019-03-05 DE DE102019105534.2A patent/DE102019105534A1/de active Pending
- 2019-03-20 JP JP2019053199A patent/JP7361480B2/ja active Active
- 2019-03-21 GB GB1903860.3A patent/GB2573868B/en active Active
- 2019-03-21 CN CN201910218359.9A patent/CN110292417B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5618293A (en) * | 1995-06-06 | 1997-04-08 | Smith & Nephews Dyonics, Inc. | Surgical instrument |
| US20100204722A1 (en) * | 2007-05-18 | 2010-08-12 | Gilsdorf John B | Apparatus for cutting out and removing tissue cylinders from a tissue, and use thereof |
| JP2012520726A (ja) * | 2009-03-16 | 2012-09-10 | シー・アール・バード・インコーポレーテッド | 回転切断を有している生体組織検査装置 |
| JP2016168103A (ja) * | 2015-03-11 | 2016-09-23 | テルモ株式会社 | 異物除去デバイス |
| JP2019069141A (ja) * | 2017-10-09 | 2019-05-09 | ジャイラス・エーシーエムアイ・インコーポレーテッド | 組織切除装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190290313A1 (en) | 2019-09-26 |
| DE102019105534A1 (de) | 2019-09-26 |
| GB2573868A (en) | 2019-11-20 |
| JP7361480B2 (ja) | 2023-10-16 |
| GB2573868B (en) | 2022-04-20 |
| GB201903860D0 (en) | 2019-05-08 |
| CN110292417A (zh) | 2019-10-01 |
| US10779850B2 (en) | 2020-09-22 |
| CN110292417B (zh) | 2024-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7684365B2 (ja) | 回転型組織切断デバイス | |
| US11559327B2 (en) | Optical obturator | |
| US5984939A (en) | Multifunctional grasping instrument with cutting member and operating channel for use in endoscopic and non-endoscopic procedures | |
| US9943377B2 (en) | Methods, systems, and devices for causing end effector motion with a robotic surgical system | |
| EP3981350B1 (en) | Robotic surgical system and methods for articulation calibration | |
| US20080228104A1 (en) | Energy Assisted Medical Devices, Systems and Methods | |
| JP7361480B2 (ja) | 回転式組織切断制御装置 | |
| US5472451A (en) | Endoscopic surgical instrument with acute angle orientation | |
| DE112018003623T5 (de) | Vorrichtung zur unterstützung der positionierung und verankerung eines endoskops bei gastrointestinalen eingriffen | |
| JP4542362B2 (ja) | 内視鏡処置システム | |
| JP5710079B1 (ja) | 内視鏡手術用処置具 | |
| CN205006941U (zh) | 一种多段可调弯的手术器械 | |
| CN111166402A (zh) | 一种内窥镜隆乳拉钩 | |
| JP2020146470A (ja) | 低侵襲性手術機器 | |
| CN224180013U (zh) | 一种具有转动模块的可视化引导器 | |
| US20220378458A1 (en) | Tissue resecting instrument | |
| JP2013179998A (ja) | 最低侵襲外科手術システム | |
| JPH0310731Y2 (ja) | ||
| KR20240078759A (ko) | 원통형 견인기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190801 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20201005 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220322 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230531 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230904 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231003 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7361480 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |