JP2019143385A - 推定装置、及び推定方法 - Google Patents
推定装置、及び推定方法 Download PDFInfo
- Publication number
- JP2019143385A JP2019143385A JP2018029144A JP2018029144A JP2019143385A JP 2019143385 A JP2019143385 A JP 2019143385A JP 2018029144 A JP2018029144 A JP 2018029144A JP 2018029144 A JP2018029144 A JP 2018029144A JP 2019143385 A JP2019143385 A JP 2019143385A
- Authority
- JP
- Japan
- Prior art keywords
- data
- estimation
- shield excavator
- direction data
- shield
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Excavating Of Shafts Or Tunnels (AREA)
Abstract
Description
シールド掘削機は、計画された掘進指示書に従って掘削を進める。掘進指示書には、リング毎に掘削終了時における水平方向の方位(指示方位)、及び鉛直方向の方位(指示ピッチ)が示されたトンネル計画線が記載され、トンネル計画線に沿って掘削を進める(掘進する)必要がある。このため、オペレータは、ジャイロコンパス等を用いて測定した、シールド掘削機により実際に掘進された測定方位及び測定ピッチを取得し、指示された方向と実際に掘削した方向との差分(計画路線偏差)が小さくなるようにシールド掘削機の掘進方向を制御する。シールド掘削機の掘進方向は、シールド掘削機の後方等に備えられ、シールド掘削機を押す複数のシールドジャッキを操作することにより制御される。例えば、全てのシールドジャッキの推進量を均等にすることでシールド掘削機は直進する。また、進行方向に左側のシールドジャッキの推進量を右側のシールドジャッキの推進量と比較して大きくすることでシールド掘削機は右側に曲がる。
例えば、トンネル計画線が曲線であってもシールド掘削機のシールドジャッキの推進量を精度良く制御する技術が開示されている(例えば、特許文献1)。
熟練したオペレータは減少の傾向にあり、確保することが難しく、また、熟練度の高いオペレータを養成するには多大な時間を要する。また、熟練したオペレータであっても操作のタイミングや設定値を誤ることがあり、シールド掘削機に対する操作が適切に行われない場合、掘削されたトンネルの設計に対する精度や安全性が低下してしまう懸念がある。
図1(a)に示すように、シールド掘削機10は、円筒形のスキンプレート11のy軸の負方向の後部において、エレクタ(不図示)によりセグメントを組み立てて、一次覆工Sを施工しつつ、地山を掘削するための機構である。シールド掘削機10においては、カッタービット15を備えた環状かつ面板型のカッター16のy軸の負方向の後部にチャンバー12が設けられている。チャンバー12内の側壁には複数の土圧計Dが設置される。土圧計Dは、チャンバー12における泥土の圧力を測定する。
チャンバー12には作泥土材注入管13から作泥土材14が注入される。チャンバー12内に堆積された掘削土は、練混ぜ翼(不図示)により、作泥土材14と撹拌することで練混ぜられ、泥土に変換される。
スクリューコンベア17は、チャンバー12の泥土を、排土ゲートGを介してコンベア18に排土する。そして、コンベア18は、スクリューコンベア17より排出された泥土を、コンベア19を介してトンネルの外部に搬出する。架台Mは、スクリューコンベア17と、コンベア18、及び19とを支持している。
ここで、いずれの位置のシールドジャッキを推進させるかによりスキンプレート11の面を推進させる力点の位置が設定され、シールド掘削機10の推進方向が決定される。また、シールドジャッキ20を推進させる速度によりシールド掘削機10の推進速度が決定される。すなわち、いずれのシールドジャッキ20を選択するかを設定する操作が行われることによりシールド掘削機10の推進方向が制御される。また、シールドジャッキの推進速度を設定する操作が行われることによりシールド掘削機10の推進速度が制御される。
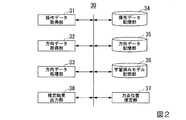
推定装置30は、操作データ取得部31と、方向データ取得部32と、方向データ処理部33と、操作データ記憶部34と、方向データ記憶部35と、学習済みモデル記憶部36と、力点位置推定部37と、推定結果出力部38と、を備える。
指示方位は、掘進指示書にて指示された水平方向(左右方向)の方位である。指示ピッチは、掘進指示書にて指示された鉛直方向(上下方向)の方位である。
指示方位と指示ピッチとは、例えば、トンネル断面の一周分のセグメントを組み立てたリング単位で指示される。指示方位は、例えば、一つのリングの掘削が終了した地点における水平方向の方位を示す。指示ピッチは、例えば、一つのリングの掘削が終了した地点における鉛直方向の方位を示す。方向データ取得部32は、取得した指示方位、指示ピッチ、および指示ジャッキストローク差を示すデータを方向データ記憶部35に記憶させる。
指示ジャッキストローク差は、シールド掘削機10をトンネル計画線で計画された曲線に沿って掘進させるために掘進指示書にて指示された複数のシールドジャッキ20の各々の推進量(ストローク)の差分である。
例えば、指示ジャッキストローク差が0(ゼロ)である場合、トンネル計画線は直線である。また、左側のシールドジャッキ20の推進量を、右側のシールドジャッキ20の推進量に対して大きくなるように指示ジャッキストローク差が指示されている場合、トンネル計画線は、進行方向に対して右側に曲がる曲線である。
方向データ取得部32は、取得した測定方位、測定ピッチ、およびジャッキストローク、およびテールクリアランスを示すデータを方向データ記憶部35に記憶させる。
方向データ処理部33は、トンネル計画線と実際に掘られたトンネル出来形の中心線とのずれ量である計画路線偏差を算出する。方向データ処理部33は、水平方向、及び鉛直方向の各々について計画路線偏差を算出する。
方向データ処理部33は、計画路線偏差を算出するために、例えば、方向データ取得部32により取得された測定方位、測定ピッチ、およびジャッキストロークからシールド掘削機10が実際に掘削した長さである掘削長を算出する。
方向データ処理部33は、算出した水平方向、及び鉛直方向の各々の計画路線偏差を方向データ記憶部35に記憶させる。
また、方向データ処理部33は、ジャッキストロークの時系列変化に基づいて、シールドジャッキ20の各々の推進速度(ジャッキ推進速度)を算出する。方向データ処理部33は、算出したジャッキ推進速度を方向データ記憶部35に記憶させる。
機械学習に用いる学習データは、例えば、シールド掘削機の推進方向に関連するデータに対して、熟練のオペレータの操作により設定された理想的な力点の位置を示すデータである。なお、推定モデルの作成に用いられる学習データは、シールド掘削機10に関するデータを用いて作成されてもよいし、一般的なシールドマシンにおいて、チャンバー内の泥土が排土される状況を示す画像に、操作の設定値が対応づけられたものであってもよい。
力点位置推定部37は、操作データ記憶部34、方向データ記憶部35に記憶されたデータの組合せを推定モデルに入力し、推定モデルから出力された力点の位置を、推定したシールド掘削機10の推進方向として設定すべき力点の位置とする。
図3に示すように、例えば、操作データは、データ種別、データ項目、タイムスタンプの各項目を有する。データ種別には、シールド掘削機10から取得されたデータの種別(操作データ、指示方向データ、測定方向データ、又は移動平均データのいずれか)が記憶される。データ項目には、データ種別に対応する各種データの項目が記憶される。タイムスタンプには、時刻T1〜T4…毎にデータ項目に対応する値が記憶される。タイムスタンプは、操作の頻度に応じた所定の時間毎(例えば1秒毎)の時刻が記憶される。
図4に示すように、例えば、指示方向データは、データ種別、データ項目、リング番号の各項目を有する。データ種別には、データの種別が記憶される。データ項目には、データ種別に対応する各種データの項目が記憶される。リング番号には、リング毎にデータ項目に対応する値が記憶される。
図5に示すように、例えば、測定方向データ及び移動平均データは、データ種別、データ項目、タイムスタンプの各項目を有する。データ種別には、データの種別が記憶される。データ項目には、データ種別に対応する各種データの項目が記憶される。タイムスタンプには、時刻T1〜T4…毎にデータ項目に対応する値が記憶される。タイムスタンプは、操作の頻度に応じた所定の時間毎の時刻が記憶される。
なお、データ項目のうち、テールクリアランスについては、所定時間ごとの測定値に代えて、予め定めたリング毎の掘削開始時と掘削終了時における所定の時間毎にデータが記憶されるようにしてもよい。
まず、推定装置30の操作データ取得部31は、シールド掘削機10に対して行われたジャッキ操作に基づくシールドジャッキ20全体の力点の位置を示す操作データを取得する(ステップS10)。
次に、方向データ取得部32は、シールド掘削機が掘進する方向に関する方向データとして、指示方向データ(指示方位、指示ピッチ、ジ指示ャッキストローク差)、測定方向データ(測定方位、測定ピッチ、テールクリアランス、ジャッキストローク、推進速度)等を取得する(ステップS11)。また、方向データ処理部33は、方向データ取得部32により取得された測定方向データを用いて計画路線偏差を算出し、また、測定方向データ、及び計画路線偏差の移動平均データを算出する。
次に、力点位置推定部37は、推定モデルから出力されたデータを、シールド掘削機10の推進すべき力点の位置として推定する(ステップS13)。
そして、推定結果出力部38は、力点位置推定部37により推定された力点の位置を、シールド掘削機10の操作室(不図示)の操作画面等に出力する(ステップS14)。
これにより、実施形態の推定装置30は、推定モデルに方向データを入力することにより、機械的にシールドジャッキ20の力点を推定することができる。推定モデルは、方向データの組合せに対して理想的なシールド掘削機10の掘進における力点の位置が対応づけられたモデルであるため、理想的な力点の位置の推定値としてシールドジャッキ20の操作に用いられることで操作支援や操作の均一化を図ることができる。
この場合、力点位置推定部37は、シールド掘削機10の先端とセグメント端とのそれぞれの位置における計画路線偏差に加えて、中折点やシールド掘削機10の後端の位置における計画路線偏差を推定モデルに入力することにより、力点の位置を推定してもよい。また、先端やセグメント端における計画路線偏差を用いずに、中折点や後端の位置における計画路線偏差のみを推定モデルに入力することにより、力点の位置を推定してもよい。
Claims (4)
- シールド掘削機の掘進の方向に関する方向データを取得する方向データ取得部と、
少なくとも前記方向データを含むデータを推定モデルに入力することにより、前記シールド掘削機が掘進すべき力点の位置を推定する力点位置推定部
を備え、
前記推定モデルは、前記方向データに対応するデータを含む入力データに前記シールド掘削機が掘進すべき力点の位置が対応づけられた学習データを用いて機械学習を実行することにより作成されたモデルである
ことを特徴とする推定装置。 - 前記方向データ取得部は、前記シールド掘削機が掘進する方向として指示された指示方向データ、前記シールド掘削機が実際に掘進した方向として測定された測定方向データを取得し、
前記指示方向データと前記測定方向データとの差分である計画路線偏差を算出する方向データ処理部を更に備え、
前記力点位置推定部は、前記計画路線偏差を前記推定モデルに入力することにより、前記力点の位置を推定する
ことを特徴とする請求項1に記載の推定装置。 - 前記方向データ処理部は、前記方向データ、又は前記計画路線偏差の少なくともいずれかにおける所定時間ごとの移動平均を示す移動平均データを算出し、
前記力点位置推定部は、前記移動平均データを、前記推定モデルに入力することにより、前記力点の位置を推定する
ことを特徴とする請求項2に記載の推定装置。 - 方向データ取得部が、シールド掘削機の掘進の方向に関する方向データを取得する工程と、
力点位置推定部が、少なくとも前記方向データを含むデータを推定モデルに入力することにより、前記シールド掘削機が掘進すべき力点の位置を推定する工程
を有し、
前記推定モデルは、前記方向データに対応するデータを含む入力データに前記シールド掘削機が掘進すべき力点の位置が対応づけられた学習データを用いて機械学習を実行することにより作成されたモデルである
ことを特徴とする推定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018029144A JP7097191B2 (ja) | 2018-02-21 | 2018-02-21 | 推定装置、及び推定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018029144A JP7097191B2 (ja) | 2018-02-21 | 2018-02-21 | 推定装置、及び推定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019143385A true JP2019143385A (ja) | 2019-08-29 |
| JP7097191B2 JP7097191B2 (ja) | 2022-07-07 |
Family
ID=67773149
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018029144A Active JP7097191B2 (ja) | 2018-02-21 | 2018-02-21 | 推定装置、及び推定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7097191B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021188294A (ja) * | 2020-05-27 | 2021-12-13 | 鹿島建設株式会社 | シールド掘進機の制御システム |
| WO2023037504A1 (ja) * | 2021-09-10 | 2023-03-16 | 日本電気株式会社 | 強化学習システム、強化学習装置及び強化学習方法 |
| JP7512872B2 (ja) | 2020-12-04 | 2024-07-09 | 株式会社大林組 | シールド掘進機の方向制御方法、力点判定装置、方向制御システム、及び学習済みモデルの生成方法。 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03107093A (ja) * | 1989-09-19 | 1991-05-07 | Tokimec Inc | シールド掘進機の自動方向制御方法 |
| JPH0455595A (ja) * | 1990-06-22 | 1992-02-24 | Maeda Corp | シールド掘進方法 |
| JPH0489998A (ja) * | 1990-08-02 | 1992-03-24 | Nippon Telegr & Teleph Corp <Ntt> | 小口径管推進方向指示装置 |
| JPH06307185A (ja) * | 1993-04-19 | 1994-11-01 | Toda Constr Co Ltd | シールド掘進機の方向制御装置 |
| JPH07279582A (ja) * | 1994-04-14 | 1995-10-27 | Mitsubishi Heavy Ind Ltd | シールド掘削機のシールドジャッキ制御方法 |
| US5529437A (en) * | 1994-09-13 | 1996-06-25 | Filipowski; Mark S. | Guidance system and method for keeping a tunnel boring machine continuously on a plan line |
| JP2018021402A (ja) * | 2016-08-05 | 2018-02-08 | 清水建設株式会社 | シールド掘削機操作分析システム、シールド掘削機操作分析方法およびプログラム |
-
2018
- 2018-02-21 JP JP2018029144A patent/JP7097191B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03107093A (ja) * | 1989-09-19 | 1991-05-07 | Tokimec Inc | シールド掘進機の自動方向制御方法 |
| JPH0455595A (ja) * | 1990-06-22 | 1992-02-24 | Maeda Corp | シールド掘進方法 |
| JPH0489998A (ja) * | 1990-08-02 | 1992-03-24 | Nippon Telegr & Teleph Corp <Ntt> | 小口径管推進方向指示装置 |
| JPH06307185A (ja) * | 1993-04-19 | 1994-11-01 | Toda Constr Co Ltd | シールド掘進機の方向制御装置 |
| JPH07279582A (ja) * | 1994-04-14 | 1995-10-27 | Mitsubishi Heavy Ind Ltd | シールド掘削機のシールドジャッキ制御方法 |
| US5529437A (en) * | 1994-09-13 | 1996-06-25 | Filipowski; Mark S. | Guidance system and method for keeping a tunnel boring machine continuously on a plan line |
| JP2018021402A (ja) * | 2016-08-05 | 2018-02-08 | 清水建設株式会社 | シールド掘削機操作分析システム、シールド掘削機操作分析方法およびプログラム |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021188294A (ja) * | 2020-05-27 | 2021-12-13 | 鹿島建設株式会社 | シールド掘進機の制御システム |
| JP7395424B2 (ja) | 2020-05-27 | 2023-12-11 | 鹿島建設株式会社 | シールド掘進機の制御システム |
| JP7512872B2 (ja) | 2020-12-04 | 2024-07-09 | 株式会社大林組 | シールド掘進機の方向制御方法、力点判定装置、方向制御システム、及び学習済みモデルの生成方法。 |
| WO2023037504A1 (ja) * | 2021-09-10 | 2023-03-16 | 日本電気株式会社 | 強化学習システム、強化学習装置及び強化学習方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7097191B2 (ja) | 2022-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2013396723B2 (en) | Arrangement for controlling percussive drilling process | |
| JP2019143385A (ja) | 推定装置、及び推定方法 | |
| JP7061891B2 (ja) | 操作推定装置、及び操作推定方法 | |
| JP7219181B2 (ja) | シールド掘進機の施工管理方法 | |
| JP6949623B2 (ja) | 操作設定提示装置、及びプログラム | |
| JP2021014726A (ja) | シールド掘進工法における掘進予測モデルの作成方法 | |
| JP2018021402A (ja) | シールド掘削機操作分析システム、シールド掘削機操作分析方法およびプログラム | |
| JP2019143387A (ja) | 操作推定装置、及び操作推定方法 | |
| JP6954002B2 (ja) | シールド掘進機の方向制御システム | |
| JP7286457B2 (ja) | シールド掘削機制御システム及びシールド掘削機制御方法 | |
| JP6880770B2 (ja) | 施工管理システム | |
| JP2007284903A (ja) | シールド工事における地盤沈下量抑制方法 | |
| JP2013253470A (ja) | 掘削装置の作業領域を決定する方法及び掘削装置 | |
| JP2017025618A (ja) | 先進ボーリング工法 | |
| JP7544633B2 (ja) | シールド掘進機の施工管理方法 | |
| JP2007303142A (ja) | シールドトンネルの施工管理方法、施工管理装置、並びに、施工管理プログラム | |
| JP7294013B2 (ja) | ジャッキパターンの選択支援方法及びシールド掘進機の方向制御システム | |
| JPS62225697A (ja) | シ−ルド工法における施工管理方法 | |
| JP7061894B2 (ja) | 判定装置、及び判定方法 | |
| JP4017781B2 (ja) | トンネル掘削地山の性状表示方法 | |
| JP2019143383A (ja) | 操作推定装置 | |
| JP7423416B2 (ja) | 情報処理装置及び情報処理方法 | |
| JP7423417B2 (ja) | 情報処理装置及び情報処理方法 | |
| KR102513958B1 (ko) | 장거리 시공이 가능한 터널 굴진 장치 및 방법 | |
| JP3904850B2 (ja) | 弧状推進工法及び掘進方法解析装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201217 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220627 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7097191 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |