JP2019122079A - 電動アクチュエータ - Google Patents
電動アクチュエータ Download PDFInfo
- Publication number
- JP2019122079A JP2019122079A JP2017253676A JP2017253676A JP2019122079A JP 2019122079 A JP2019122079 A JP 2019122079A JP 2017253676 A JP2017253676 A JP 2017253676A JP 2017253676 A JP2017253676 A JP 2017253676A JP 2019122079 A JP2019122079 A JP 2019122079A
- Authority
- JP
- Japan
- Prior art keywords
- axial direction
- motor
- output
- viewed
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H19/00—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion
- F16H19/001—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for conveying reciprocating or limited rotary motion
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H61/32—Electric motors actuators or related electrical control means therefor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/215—Magnetic effect devices, e.g. Hall-effect or magneto-resistive elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/08—Insulating casings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/16—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields
- H02K5/173—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields using bearings with rolling contact, e.g. ball bearings
- H02K5/1732—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields using bearings with rolling contact, e.g. ball bearings radially supporting the rotary shaft at both ends of the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/22—Auxiliary parts of casings not covered by groups H02K5/06-H02K5/20, e.g. shaped to form connection boxes or terminal boxes
- H02K5/225—Terminal boxes or connection arrangements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
- H02K7/083—Structural association with bearings radially supporting the rotary shaft at both ends of the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
- F16H2001/325—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear comprising a carrier with pins guiding at least one orbital gear with circular holes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H2057/02034—Gearboxes combined or connected with electric machines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H2061/2892—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted other gears, e.g. worm gears, for transmitting rotary motion to the output mechanism
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2211/00—Specific aspects not provided for in the other groups of this subclass relating to measuring or protective devices or electric components
- H02K2211/03—Machines characterised by circuit boards, e.g. pcb
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Motor Or Generator Frames (AREA)
Abstract
【課題】モータシャフトと出力シャフトとが径方向に離れて配置され、かつ、径方向に小型化できる構造を有する電動アクチュエータを提供する。【解決手段】軸方向に延びるモータシャフト41を有するモータ部と、モータシャフトの軸方向一方側に連結される減速機構50と、減速機構を介してモータシャフトの回転が伝達される出力シャフト61を有する出力部と、モータ部、減速機構、および出力部を収容するハウジングと、を備える。出力シャフトは、モータシャフトの軸方向に延びる。ハウジングは、軸方向に沿って視て多角形状のハウジング本体11aを有する。モータシャフトと出力シャフトとは、軸方向に沿って視て、ハウジング本体の対角線に沿って並んで配置される。出力シャフトは、軸方向に沿って視て、ハウジング本体の角部に配置される。【選択図】図5
Description
本発明は、電動アクチュエータに関する。
モータ部と、モータ部に連結される減速機構と、減速機構を介してモータ部の回転が伝達される出力部と、を備える電動アクチュエータが知られる。例えば、特許文献1には、車両走行用のエンジン出力を変速する自動変速機に搭載された電動アクチュエータが記載される。
上記のような電動アクチュエータにおいては、モータ部のモータシャフトと出力部の出力シャフトとをモータシャフトの径方向に離して配置する場合がある。しかし、この場合、電動アクチュエータがモータシャフトの径方向に大型化する問題があった。
本発明は、上記事情に鑑みて、モータシャフトと出力シャフトとが径方向に離れて配置され、かつ、径方向に小型化できる構造を有する電動アクチュエータを提供することを目的の一つとする。
本発明の電動アクチュエータの一つの態様は、軸方向に延びるモータシャフトを有するモータ部と、前記モータシャフトの軸方向一方側に連結される減速機構と、前記減速機構を介して前記モータシャフトの回転が伝達される出力シャフトを有する出力部と、前記モータ部、前記減速機構、および前記出力部を収容するハウジングと、を備える。前記出力シャフトは、前記モータシャフトの軸方向に延びる。前記ハウジングは、軸方向に沿って視て多角形状のハウジング本体を有する。前記モータシャフトと前記出力シャフトとは、軸方向に沿って視て、前記ハウジング本体の対角線に沿って並んで配置される。前記出力シャフトは、軸方向に沿って視て、前記ハウジング本体の角部に配置される。
本発明の一つの態様によれば、モータシャフトと出力シャフトとが径方向に離れて配置され、かつ、径方向に小型化できる構造を有する電動アクチュエータが提供される。
各図においてZ軸方向は、正の側を上側とし、負の側を下側とする上下方向である。各図に適宜示す仮想軸である中心軸J1の軸方向は、Z軸方向、すなわち上下方向と平行である。X軸方向は、Z軸方向と直交する方向である。Y軸方向は、Z軸方向およびX軸方向の両方と直交する方向である。以下の説明においては、中心軸J1の軸方向と平行な方向を単に「軸方向Z」と呼び、X軸方向と平行な方向を「第1方向X」と呼び、Y軸方向と平行な方向を「第2方向Y」と呼ぶ。また、特に断りのない限り、中心軸J1を中心とする径方向を単に「径方向」と呼び、中心軸J1を中心とする周方向を単に「周方向」と呼ぶ。
本実施形態において、上側は、軸方向一方側に相当する。なお、上側および下側とは、単に各部の相対位置関係を説明するための名称であり、実際の配置関係等は、これらの名称で示される配置関係等以外の配置関係等であってもよい。
図1から図3に示す本実施形態の電動アクチュエータ10は、車両に取り付けられる。より詳細には、電動アクチュエータ10は、車両の運転者のシフト操作に基づいて駆動されるシフト・バイ・ワイヤ方式のアクチュエータ装置に搭載される。図3に示すように、電動アクチュエータ10は、モータ部40と、減速機構50と、出力部60と、回路基板70と、モータ部センサ71と、出力部センサ72と、ハウジング11と、バスバーホルダ90と、図示しないバスバーと、を備える。
モータ部40は、モータシャフト41と、第1ベアリング44aと、第2ベアリング44bと、第3ベアリング44cと、第4ベアリング44dと、ロータ本体42と、ステータ43と、モータ部用センサマグネット45と、マグネットホルダ46と、を有する。モータシャフト41は、軸方向Zに延びる。
第1ベアリング44aと第2ベアリング44bと第3ベアリング44cと第4ベアリング44dとは、モータシャフト41を中心軸J1周りに回転可能に支持する。本実施形態において、第1ベアリング44a、第2ベアリング44b、第3ベアリング44c、および第4ベアリング44dは、例えば、ボールベアリングである。
モータシャフト41のうち第3ベアリング44cに支持される部分である偏心軸部41aは、中心軸J1と平行で中心軸J1に対して偏心した偏心軸J2を中心として延びる円柱状である。モータシャフト41のうち偏心軸部41a以外の部分は、中心軸J1を中心として延びる円柱状である。
ロータ本体42は、モータシャフト41に固定される。より詳細には、ロータ本体42は、モータシャフト41の下側の部分に固定される。ロータ本体42は、ロータコア42aと、ロータマグネット42bと、を有する。ロータコア42aは、モータシャフト41のうち偏心軸部41aよりも下側の部分の外周面に固定される。ロータマグネット42bは、ロータコア42aの外周面に固定される。
ステータ43は、ロータ本体42の径方向外側に隙間を介して配置される。ステータ43は、ロータ本体42の径方向外側を囲む環状である。ステータ43は、ステータコア43aと、インシュレータ43bと、複数のコイル43cと、を有する。コイル43cは、インシュレータ43bを介してステータコア43aに装着される。
マグネットホルダ46は、中心軸J1を中心とする円環状である。マグネットホルダ46は、モータシャフト41の上側の端部における外周面に固定される。モータ部用センサマグネット45は、中心軸J1を中心とする円環板状である。モータ部用センサマグネット45の板面は、軸方向Zと直交する。モータ部用センサマグネット45は、マグネットホルダ46の下面のうち径方向外周縁部に固定される。これにより、モータ部用センサマグネット45は、マグネットホルダ46を介してモータシャフト41に取り付けられる。本実施形態においてモータ部用センサマグネット45は、モータシャフト41のうち回路基板70よりも上側に突出した部分に取り付けられ、回路基板70の上側の面と隙間を介して対向する。
減速機構50は、モータシャフト41の上側に連結される。減速機構50は、ロータ本体42およびステータ43の上側に配置される。減速機構50は、外歯ギア51と、内歯ギア52と、出力ギア53と、を有する。
図3および図4に示すように、外歯ギア51は、偏心軸部41aの偏心軸J2を中心として、偏心軸J2の径方向に拡がる円環板状である。外歯ギア51の径方向外側面には、歯車部が設けられる。外歯ギア51は、モータシャフト41に第3ベアリング44cを介して接続される。これにより、減速機構50は、モータシャフト41に連結される。外歯ギア51は、第3ベアリング44cの外輪に径方向外側から嵌め合わされる。これにより、第3ベアリング44cはモータシャフト41と外歯ギア51とを、偏心軸J2周りに相対的に回転可能に連結する。
外歯ギア51は、外歯ギア51を軸方向Zに貫通する複数の孔51aを有する。複数の孔51aは、偏心軸J2を中心とする周方向に沿って一周に亘って等間隔に配置される。図4に示すように、孔51aの軸方向Zに沿って視た形状は、円形状である。
内歯ギア52は、外歯ギア51の径方向外側を囲んで回路基板ケース20に固定され、外歯ギア51と噛み合う。内歯ギア52は、ハウジング11の後述する金属部材22に保持される。内歯ギア52は、内歯ギア本体52aと、複数の突起部52bと、を有する。内歯ギア本体52aは、中心軸J1を中心とする円環状である。内歯ギア本体52aの内周面には、歯車部が設けられる。内歯ギア本体52aの歯車部は、外歯ギア51の歯車部と噛み合う。突起部52bは、内歯ギア本体52aの外周面から径方向外側に突出する。複数の突起部52bは、周方向に沿って一周に亘って等間隔に配置される。
出力ギア53は、出力ギア本体53aと、複数のピン53bと、を有する。出力ギア本体53aは、外歯ギア51および内歯ギア52の下側に配置される。出力ギア本体53aは、中心軸J1を中心として径方向に拡がる円環板状である。出力ギア本体53aの径方向外側面には、歯車部が設けられる。出力ギア本体53aの歯車部は、内歯ギア本体52aよりも径方向外側に突出する。図3に示すように、出力ギア本体53aは、モータシャフト41に第4ベアリング44dを介して接続される。
複数のピン53bは、出力ギア本体53aの上面から上側に突出する円筒状である。図4に示すように、複数のピン53bは、周方向に沿って一周に亘って等間隔に配置される。ピン53bの外径は、孔51aの内径よりも小さい。複数のピン53bは、複数の孔51aのそれぞれに下側から通される。ピン53bの外周面は、孔51aの内周面と内接する。孔51aの内周面は、ピン53bを介して、外歯ギア51を中心軸J1周りに揺動可能に支持する。
出力部60は、電動アクチュエータ10の駆動力を出力する部分である。図3に示すように、出力部60は、モータ部40の径方向外側に配置される。出力部60は、出力シャフト61と、駆動ギア62と、出力部用センサマグネット63と、マグネットホルダ64と、を有する。
図4に示すように、出力シャフト61は、モータシャフト41の軸方向Zに延びる筒状である。このように、出力シャフト61がモータシャフト41と同じ方向に延びるため、モータシャフト41の回転を出力シャフト61に伝達する減速機構50の構造を簡単化できる。本実施形態において出力シャフト61は、仮想軸である出力中心軸J3を中心とする円筒状である。出力中心軸J3は、中心軸J1と平行であり、中心軸J1から径方向に離れて配置される。すなわち、モータシャフト41と出力シャフト61とは、モータシャフト41の径方向に離れて配置される。
図3に示すように、出力シャフト61は、下側に開口する開口部61dを有する。本実施形態において出力シャフト61は、軸方向両側に開口する。出力シャフト61は、内周面の下部にスプライン溝を有する。出力シャフト61は、円筒状の出力シャフト本体61aと、出力シャフト本体61aから出力中心軸J3の径方向外側に突出するフランジ部61bと、を有する。出力シャフト61は、モータシャフト41の径方向においてロータ本体42と重なる位置に配置される。出力シャフト61の下側の端部、すなわち開口部61dは、モータ部40の下側の端部よりも上側に配置される。本実施形態においてモータ部40の下側の端部とは、モータシャフト41の下側の端部である。
出力シャフト61には、下側から開口部61dを介して被駆動シャフトDSが挿入されて連結される。より詳細には、被駆動シャフトDSの外周面に設けられたスプライン部が、出力シャフト61の内周面に設けられたスプライン溝に嵌め合わされることで、出力シャフト61と被駆動シャフトDSとが連結される。被駆動シャフトDSには、出力シャフト61を介して電動アクチュエータ10の駆動力が伝達される。これにより、電動アクチュエータ10は、被駆動シャフトDSを出力中心軸J3周りに回転させる。
以上に説明したように、軸方向Zにおいて、被駆動シャフトDSが挿入される開口部61dが開口する側は、減速機構50に対してモータ部40が配置されるのと同じ側である。そのため、モータ部40を、電動アクチュエータ10が取り付けられる被取付体側に配置することができる。これにより、被駆動シャフトDSの径方向において、被駆動シャフトDSの外側の空間を、モータ部40を配置する空間として利用できる。したがって、電動アクチュエータ10をより近づけた状態で被取付体に取り付けることができる。そのため、本実施形態によれば、被取付体に取り付けた際に取り付け高さを小さくできる電動アクチュエータ10が得られる。本実施形態において被取付体は、車両である。
また、本実施形態によれば、モータシャフト41がモータ部40から減速機構50に向かって延びる向きは、上向きであり、出力シャフト61の開口部61dが開口する向きと逆向きである。そのため、出力シャフト61が減速機構50から延びる向きを、モータシャフト41がモータ部40から減速機構50に向かって延びる向きと逆向きにできる。これにより、モータシャフト41と出力シャフト61とを、モータシャフト41の径方向に重ねて配置することができ、電動アクチュエータ10を軸方向Zに小型化できる。また、出力シャフト61がモータシャフト41の径方向においてロータ本体42と重なるため、電動アクチュエータ10をより軸方向Zに小型化できる。これにより、被取付体に取り付けた際に電動アクチュエータ10の取り付け高さをより小さくしやすい。
また、本実施形態によれば、モータ部40の下側の端部は、開口部61dよりも下側に配置される。そのため、モータ部40をより被取付体に近づけて配置することができる。これにより、被取付体に取り付けた際に電動アクチュエータ10の取り付け高さをより小さくしやすい。
駆動ギア62は、出力シャフト61に固定され出力ギア53と噛み合う。本実施形態において駆動ギア62は、出力シャフト本体61aの外周面のうちフランジ部61bよりも上側の部分に固定される。駆動ギア62は、フランジ部61bの上面と接触する。図4に示すように、駆動ギア62は、出力シャフト61から出力ギア53に向かって延び、出力ギア53に近づくに従って幅が大きくなる扇形ギアである。駆動ギア62の出力ギア53側の端部には、歯車部が設けられる。駆動ギア62の歯車部は、出力ギア53の歯車部と噛み合う。
図3に示すように、マグネットホルダ64は、出力中心軸J3を中心として軸方向Zに延びる略円筒状の部材である。マグネットホルダ64は、軸方向両側に開口する。マグネットホルダ64は、出力シャフト61の上側、かつ、減速機構50の径方向外側に配置される。マグネットホルダ64は、回路基板70を軸方向Zに貫通する。マグネットホルダ64の内部は、出力シャフト61の内部と繋がる。マグネットホルダ64には、出力シャフト61に挿入された被駆動シャフトDSの上端部が圧入される。これにより、マグネットホルダ64は、被駆動シャフトDSに固定される。
出力部用センサマグネット63は、出力中心軸J3を中心とする円環状である。出力部用センサマグネット63は、マグネットホルダ64の上側の端部における外周面に固定される。被駆動シャフトDSにマグネットホルダ64が固定されることで、出力部用センサマグネット63は、マグネットホルダ64を介して被駆動シャフトDSに固定される。出力部用センサマグネット63は、回路基板70の上側の面と隙間を介して対向する。
モータシャフト41が中心軸J1周りに回転されると、偏心軸部41aは、中心軸J1を中心として周方向に公転する。偏心軸部41aの公転は第3ベアリング44cを介して外歯ギア51に伝達され、外歯ギア51は、孔51aの内周面とピン53bの外周面との内接する位置が変化しつつ、揺動する。これにより、外歯ギア51の歯車部と内歯ギア52の歯車部との噛み合う位置が、周方向に変化する。したがって、内歯ギア52に、外歯ギア51を介してモータシャフト41の回転力が伝達される。
ここで、本実施形態では、内歯ギア52は固定されているため回転しない。そのため、内歯ギア52に伝達される回転力の反力によって、外歯ギア51が偏心軸J2周りに回転する。このとき外歯ギア51の回転する向きは、モータシャフト41の回転する向きと反対向きとなる。外歯ギア51の偏心軸J2周りの回転は、孔51aとピン53bとを介して、出力ギア53に伝達される。これにより、出力ギア53が中心軸J1周りに回転する。出力ギア53には、モータシャフト41の回転が減速されて伝達される。
出力ギア53が回転すると、出力ギア53に噛み合う駆動ギア62が出力中心軸J3周りに回転する。これにより、駆動ギア62に固定された出力シャフト61が出力中心軸J3周りに回転する。このようにして、出力シャフト61には、減速機構50を介してモータシャフト41の回転が伝達される。
回路基板70は、ロータ本体42よりも上側に配置される。回路基板70は、減速機構50の上側に配置される。回路基板70は、板面が軸方向Zと直交する板状である。図示は省略するが、回路基板70の軸方向Zに沿って視た形状は、四角形の1つの角部が面取りされた形状である。すなわち、回路基板70の軸方向Zに沿って視た形状は、五角形状である。回路基板70は、回路基板70を軸方向Zに貫通する貫通孔70aを有する。貫通孔70aには、モータシャフト41が通される。これにより、モータシャフト41は、回路基板70を軸方向Zに貫通する。回路基板70は、図示しないバスバーを介して、ステータ43と電気的に接続される。すなわち、回路基板70は、モータ部40と電気的に接続される。
モータ部センサ71は、回路基板70の上面に固定される。より詳細には、モータ部センサ71は、回路基板70の上側の面のうちモータ部用センサマグネット45と隙間を介して軸方向Zに対向する部分に固定される。モータ部センサ71は、モータ部用センサマグネット45の磁界を検出する磁気センサである。モータ部センサ71は、例えば、ホール素子である。図示は省略するが、モータ部センサ71は、例えば、周方向に沿って3つ設けられる。モータ部センサ71は、モータ部用センサマグネット45の磁界を検出することでモータ部用センサマグネット45の回転位置を検出してモータシャフト41の回転を検出する。
本実施形態では、減速機構50がモータシャフト41の上側に連結され、回路基板70がロータ本体42よりも上側かつ減速機構50の上側に配置される。そのため、回路基板70とロータ本体42との軸方向Zの間に減速機構50が配置される。これにより、回路基板70に固定されるモータ部センサ71を、ロータ本体42およびステータ43から離して配置することができる。したがって、モータ部センサ71がロータ本体42およびステータ43から生じる磁界の影響を受けにくくでき、モータ部センサ71の検出精度を向上できる。
出力部センサ72は、回路基板70の上面に固定される。より詳細には、出力部センサ72は、回路基板70の上側の面のうち出力部用センサマグネット63と隙間を介して軸方向Zに対向する部分に固定される。出力部センサ72は、出力部用センサマグネット63の磁界を検出する磁気センサである。出力部センサ72は、例えば、ホール素子である。図示は省略するが、出力部センサ72は、例えば、出力中心軸J3を中心とする周方向に沿って3つ設けられる。出力部センサ72は、出力部用センサマグネット63の磁界を検出することで出力部用センサマグネット63の回転位置を検出して被駆動シャフトDSの回転を検出する。
本実施形態によれば、減速機構50がモータ部40よりも回路基板70側に配置される構成により、出力ギア53に回転駆動力を伝達する駆動ギア62を出力部用センサマグネット63に近づけて配置できる。そのため、出力ギア53における回転駆動力が伝達される部分から出力部用センサマグネット63が固定される部分までの軸方向Zの距離を短くでき、出力部用センサマグネット63が固定される部分における被駆動シャフトDSの軸ぶれを抑制できる。これにより、出力部センサ72による被駆動シャフトDSの回転検出精度を向上できる。
ハウジング11は、モータ部40、減速機構50、出力部60、回路基板70、モータ部センサ71、出力部センサ72、バスバーホルダ90および図示しないバスバーを収容する。ハウジング11は、モータケース30と、回路基板ケース20と、を有する。モータケース30は、上側に開口する。図1から図3に示すように、モータケース30は、モータケース本体31と、複数の取付脚部34,35,36と、ステータ固定部材37と、を有する。すなわち、ハウジング11は、モータケース本体31と、複数の取付脚部34,35,36と、ステータ固定部材37と、を有する。回路基板ケース20は、略直方体の箱状である。図3に示すように、回路基板ケース20は、モータケース30の上側に取り付けられてモータケース30の開口を塞ぐ。回路基板ケース20は、回路基板70を収容する。回路基板ケース20は、回路基板ケース本体21と、金属部材22と、回路基板ケースカバー26と、を有する。すなわち、ハウジング11は、回路基板ケース本体21と、金属部材22と、回路基板ケースカバー26と、を有する。
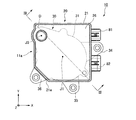
回路基板ケース本体21とモータケース本体31とは、樹脂製である。本実施形態においては、回路基板ケース本体21とモータケース本体31とによってハウジング本体11aが構成される。すなわち、ハウジング11は、樹脂製のハウジング本体11aを有する。図2に示すように、ハウジング本体11aは、軸方向Zに沿って視て、多角形状である。より詳細には、ハウジング本体11aは、軸方向Zに沿って視て、四角形の1つの角部が面取りされた形状である。すなわち、ハウジング本体11aは、軸方向Zに沿って視て、五角形状である。1つの角部が面取りされた四角形は、第1方向Xに延びる一対の辺と、第2方向Yに延びる一対の辺と、を含む略正方形である。
本実施形態では、回路基板ケース本体21を軸方向Zに沿って視た形状は、回路基板ケース20を軸方向Zに沿って視た形状と同じである。モータケース本体31は、軸方向Zに沿って視て回路基板ケース本体21の外形の内側、すなわち回路基板ケース20の外形の内側に配置される。そのため、本実施形態においてハウジング本体11aを軸方向Zに沿って視た形状は、回路基板ケース20を軸方向Zに沿って視た形状と同じである。なお、本明細書において、ある部材を軸方向Zに沿って視た形状は、ある部材を軸方向Zに沿って視たときの最外形の形状を含む。
各図に適宜示す二点鎖線は、軸方向Zに沿って視たときのハウジング本体11aの対角線Dである。また、各図に適宜示すD軸方向は、対角線Dと平行な方向を示す。図5に示すように、本実施形態において、モータシャフト41と出力シャフト61とは、軸方向Zに沿って視て、ハウジング本体11aの対角線Dに沿って並んで配置される。出力シャフト61は、軸方向Zに沿って視て、ハウジング本体11aの角部に配置される。このように、軸方向Zに沿って視て多角形状のハウジング本体11aの対角線Dを利用してモータシャフト41と出力シャフト61とを配置することで、モータシャフト41と出力シャフト61とを径方向に離して配置した場合であっても、電動アクチュエータ10全体を小型化しやすい。したがって、本実施形態によれば、モータシャフト41と出力シャフト61とが径方向に離れて配置され、かつ、径方向に小型化できる構造を有する電動アクチュエータ10が得られる。
本明細書において「モータシャフトと出力シャフトとが、軸方向に沿って視て、ハウジング本体の対角線に沿って並んで配置される」とは、モータシャフトと出力シャフトとが並ぶ方向が、対角線が延びる方向に沿っていればよく、軸方向に沿って視てモータシャフトと出力シャフトとが対角線と重ならなくてもよい。
また、本明細書において「出力シャフトが、軸方向に沿って視て、ハウジング本体の角部に配置される」とは、例えば、軸方向に沿って視て、ハウジング本体の中心からハウジング本体の外形を構成する各辺に対して垂直二等分線をそれぞれ引いた場合に、出力シャフトが、その垂直二等分線で区切られた1つの領域内に配置され、かつ、ハウジング本体の中心に対してハウジング本体の外形の頂点寄りの位置に配置されることを含む。
また、本実施形態によれば、駆動ギア62は、出力シャフト61から出力ギア53に向かって延び、出力ギア53に向かうに従って幅が大きくなる扇形ギアである。そのため、円形の駆動ギアを用いるような場合に比べて、出力シャフト61をハウジング本体11aの角部に配置しても、ハウジング11を大型化することなく駆動ギア62を配置することができる。したがって、電動アクチュエータ10をより小型化できる。
本実施形態では、モータシャフト41は、軸方向Zに沿って視て、ハウジング本体11aの中央部に配置される。そのため、ハウジング11を小型化しつつ、モータシャフト41に連結される減速機構50を配置する領域を確保しやすい。
本明細書において「モータシャフトが、軸方向に沿って視て、ハウジング本体の中央部に配置される」とは、例えば、軸方向に沿って視て、ハウジング本体の中心から外形線に向かう方向において、モータシャフトが、ハウジング本体の中心寄りの領域と重なって配置されることを含む。
図3に示すように、回路基板ケース本体21は、上側に開口する箱状である。図2に示すように、回路基板ケース本体21は、軸方向Zに沿って視て、多角形状である。より詳細には、回路基板ケース本体21は、軸方向Zに沿って視て、四角形の1つの角部が面取りされた形状である。すなわち、回路基板ケース本体21は、軸方向Zに沿って視て、五角形状である。回路基板ケース本体21のうち四角形の角部が面取りされた部分に相当する箇所を面取り部21eと呼ぶ。面取り部21eは、ハウジング本体11aのうち四角形の角部が面取りされた部分にも相当する。回路基板ケース本体21は、軸方向Zに沿って視て、モータケース本体31よりも大きく、モータケース本体31の全体と重なる。
図3に示すように、回路基板ケース本体21は、底壁21aと、側壁21bと、を有する。すなわち、回路基板ケース20は、底壁21aと、側壁21bと、を有する。底壁21aは、軸方向Zと直交する平面に沿って拡がる。底壁21aは、軸方向Zに沿って視て、モータケース本体31よりも径方向外側に拡がる。底壁21aは、モータケース30の上側の開口を塞ぐ。底壁21aは、ステータ43の上側を覆う。
底壁21aは、底壁21aの下側の面から上側に窪む凹部21cを有する。図5に示すように、凹部21cは、対角線Dに沿って延びる。図3に示すように、底壁21aは、底壁21aを軸方向Zに貫通する中央貫通孔21dを有する。中央貫通孔21dは、凹部21cの底面から底壁21aの上側の面まで底壁21aを貫通する。中央貫通孔21dは、軸方向Zに沿って視て、中心軸J1を中心とする円形状である。中央貫通孔21dには、モータシャフト41が通される。
側壁21bは、底壁21aの外縁部から上側に突出する角筒状である。側壁21bの内側には、回路基板70が収容される。すなわち、回路基板ケース20は、底壁21aよりも上側において回路基板70を収容する。側壁21bは、上側に開口する。側壁21bの上側の開口、すなわち回路基板ケース20の上側の開口は、回路基板ケースカバー26によって塞がれる。回路基板ケースカバー26は、例えば、金属製である。
図1および図2に示すように、回路基板ケース20には、第1コネクタ部81および第2コネクタ部82が設けられる。すなわち、電動アクチュエータ10は、第1コネクタ部81および第2コネクタ部82を備える。第1コネクタ部81および第2コネクタ部82は、外部装置が接続される部分である。外部装置は、例えば、モータ部40に電源を供給する電源装置等である。
図2に示すように、第1コネクタ部81と第2コネクタ部82とは、軸方向Zに沿って視て、ハウジング本体11aよりも外側、すなわち回路基板ケース20よりも外側に突出する。本実施形態において第1コネクタ部81と第2コネクタ部82とは、回路基板ケース20から第1方向Xの一方側に突出する。第1コネクタ部81と第2コネクタ部82とは、軸方向Zに沿って視て、軸方向Zと直交する第2方向Yに並んで配置される。第1コネクタ部81および第2コネクタ部82は、第1方向Xにおける回路基板ケース20と逆側に開口する角筒状である。
金属部材22は、金属製である。図3に示すように、金属部材22は、回路基板ケース本体21に保持される。すなわち、金属部材22は、ハウジング本体11aに保持される。金属部材22は、凹部21c内に収容されて保持される。本実施形態において金属部材22の一部は、ハウジング本体11aに埋め込まれる。そのため、金型に金属部材22を挿入して樹脂を流し込むインサート成形を用いて、ハウジング本体11aの一部または全体を作ることができる。したがって、ハウジング11の作製が容易である。本実施形態では、ハウジング本体11aのうち回路基板ケース本体21が、金型に金属部材22を挿入して樹脂を流し込むインサート成形によって作られる。
図6に示すように、金属部材22は、ベアリング保持部23と、腕部25と、出力シャフト支持部24と、を有する。ベアリング保持部23は、円環板部23aと、外側筒部23bと、内側筒部23cと、天板部23dと、を有する。円環板部23aは、中心軸J1を中心とする円環板状である。円環板部23aの板面は、軸方向Zと直交する。
外側筒部23bは、円環板部23aの外周縁部から下側に突出する円筒状である。外側筒部23bは、外側筒部23bの壁部を径方向に貫通する複数のスリット23eを有する。複数のスリット23eは、周方向に沿って一周に亘って等間隔に配置される。スリット23eは、下側に開口する。
図3に示すように、外側筒部23bの径方向内側には、内歯ギア52が保持される。これにより、減速機構50は、金属部材22を介して底壁21aの下側の面に保持される。図示は省略するが、内歯ギア52の突起部52bは、スリット23eのそれぞれに挿入される。これにより、突起部52bがスリット23eの内側面に引っ掛かり、内歯ギア52が金属部材22に対して周方向に動くことを抑制できる。外側筒部23bは、中央貫通孔21dの径方向内側に埋め込まれて保持される。
内側筒部23cは、円環板部23aの内周縁部から上側に突出する円筒状である。内側筒部23cの径方向内側には、第1ベアリング44aが保持される。これにより、ベアリング保持部23は、第1ベアリング44aを保持する。内側筒部23cは、底壁21aよりも上側に突出する。内側筒部23cは、側壁21bの径方向内側に配置される。内側筒部23cは、貫通孔70aを介して回路基板70を軸方向Zに貫通し、回路基板70よりも上側に突出する。
これにより、内側筒部23cに保持される第1ベアリング44aの少なくとも一部は、貫通孔70aに挿入される。そのため、第1ベアリング44aによって、モータシャフト41のうちモータ部用センサマグネット45が取り付けられる部分に近い位置で、モータシャフト41を支持することができる。これにより、モータシャフト41のうちモータ部用センサマグネット45が取り付けられる部分の軸がぶれることを抑制でき、モータ部用センサマグネット45の位置がぶれることを抑制できる。したがって、モータ部センサ71によるモータシャフト41の回転検出精度が低下することを抑制できる。また、径方向に沿って視て、第1ベアリング44aと回路基板70とを重ねて配置できるため、電動アクチュエータ10を軸方向Zに小型化しやすい。
本明細書において「ベアリング保持部が第1ベアリングを保持する」とは、ベアリング保持部が第1ベアリングを径方向に位置決めできればよく、第1ベアリングがベアリング保持部に固定されなくてもよい。本実施形態において第1ベアリング44aは、内側筒部23cに嵌め合わされることで、径方向に位置決めされる。第1ベアリング44aは、内側筒部23cに対して固定されない。
天板部23dは、内側筒部23cの上側の端部から径方向内側に突出する。天板部23dは、中心軸J1を中心とする円環状であり、板面が軸方向Zと直交する板状である。天板部23dの内側には、モータシャフト41の上側の端部が通される。天板部23dの内周縁部は、下側に湾曲する。天板部23dは、第1ベアリング44aの上側を覆う。
天板部23dと第1ベアリング44aとの軸方向Zの間には、予圧部材47が配置される。すなわち、電動アクチュエータ10は、予圧部材47を備える。予圧部材47は、周方向に沿って延びる円環状のウェーブワッシャである。予圧部材47は、天板部23dの下側の面と第1ベアリング44aの外輪の上側の端部とに接触する。予圧部材47は、第1ベアリング44aの外輪に対して下向きの予圧を加える。
腕部25は、ベアリング保持部23からモータシャフト41の径方向外側に延びる。より詳細には、腕部25は、外側筒部23bの下側の端部から対角線Dに沿って延びる。図6に示すように、腕部25は、板面が軸方向Zと直交する板状である。腕部25は、軸方向Zに沿って視て、対角線Dが延びる方向に長い長方形状である。腕部25は、ベアリング保持部23と出力シャフト支持部24とを繋ぐ。これにより、金属部材22のうちベアリング保持部23と出力シャフト支持部24と以外の部分の大きさを最小限に抑えやすく、金属部材22を小型化しやすい。したがって、ハウジング11の製造コストを低減しやすく、ハウジング11の重量を小さくしやすい。
出力シャフト支持部24は、腕部25の径方向外側の端部に繋がる。出力シャフト支持部24は、出力中心軸J3を中心とする円環状であり、板面が軸方向Zと直交する板状である。このように、本実施形態によれば、出力シャフト支持部24および腕部25が板状であるため、出力シャフト支持部24および腕部25を金属製の板部材を打ち抜く、または折り曲げる等のプレス加工によって容易に作ることができる。本実施形態において金属部材22は、金属製の板部材をプレス加工することによって作られる単一の部材である。
出力シャフト支持部24は、出力シャフト支持部24を軸方向Zに貫通する貫通孔24aを有する。図3に示すように、貫通孔24aには、出力シャフト本体61aの上側の端部である嵌合部61cが嵌め合わされる。すなわち、出力シャフト61は、貫通孔24aに嵌め合わされる嵌合部61cを有する。これにより、出力シャフト支持部24は、出力シャフト61を支持する。
このように、本実施形態によれば、金属製の金属部材22によって第1ベアリング44aを保持でき、かつ、出力シャフト61を支持できる。これにより、第1ベアリング44aに支持されるモータシャフト41と出力シャフト61とを、相対位置精度よく配置できる。また、金属部材22が保持されるハウジング本体11aは、樹脂製であるため、ハウジング11を軽量化できる。以上により、本実施形態によれば、軽量化でき、かつ、モータシャフト41と出力シャフト61との相対位置精度が低下することを抑制できる構造を有する電動アクチュエータ10が得られる。また、金属部材22は、金属製であるため、樹脂に比べて強度および耐熱性が高い。そのため、ハウジング11に外力および熱が加えられた場合であっても、金属部材22が大きく変形・損傷することを抑制でき、モータシャフト41と出力シャフト61とがずれることを抑制できる。
また、本実施形態によれば、貫通孔24aに嵌合部61cを嵌め合わせることで、出力シャフト61を金属部材22に対して、容易に支持させることができ、かつ、容易に位置決めすることができる。したがって、電動アクチュエータ10の組み立てを容易にできる。
図7に示すように、モータケース本体31は、モータ収容部32と、出力部保持部33と、を有する。モータ収容部32は、底部を有し上側に開口する筒状である。モータ収容部32は、中心軸J1を中心とする円筒状である。図3に示すように、モータ収容部32は、モータ部40を収容する。すなわち、モータケース本体31は、モータ部40を収容する。
なお、本明細書において「モータケース本体がモータ部を収容する」とは、モータケース本体によってモータ部の一部が収容されればよく、モータ部の他の一部がモータケース本体の外部に突出してもよい。本実施形態では、モータケース本体31、すなわちモータ収容部32は、モータシャフト41の下側の部分、ロータ本体42、ステータ43、および第2ベアリング44bを収容する。
図7に示すように、出力部保持部33は、モータ収容部32から径方向外側に突出する。出力部保持部33は、基部33aと、出力シャフト保持部33bと、を有する。基部33aは、モータ収容部32から径方向外側に突出する。基部33aの幅は、軸方向Zに沿って視て、径方向外側に向かうに従って小さくなる。出力シャフト保持部33bは、基部33aの径方向外側の端部から軸方向両側に突出する。出力シャフト保持部33bは、出力中心軸J3を中心とする円筒状である。出力シャフト保持部33bは、軸方向両側に開口する。出力シャフト保持部33bの内部は、基部33aを軸方向Zに貫通する。
図3に示すように、出力シャフト保持部33bの内側には、円筒状のブッシュ65が嵌め合わされる。ブッシュ65の上側の端部には、出力中心軸J3を中心とする径方向の外側に突出するフランジ部が設けられる。ブッシュ65のフランジ部は、出力シャフト保持部33bの上側の端部によって下側から支持される。ブッシュ65の内側には、出力シャフト本体61aのうちフランジ部61bよりも下側の部分が嵌め合わされる。ブッシュ65は、出力シャフト61を出力中心軸J3周りに回転可能に支持する。フランジ部61bは、ブッシュ65のフランジ部を介して出力シャフト保持部33bの上側の端部によって下側から支持される。出力シャフト61の下側の開口部61dは、ブッシュ65よりも下側に配置される。
図7に示すように、取付脚部34,35,36は、モータケース本体31から突出する。より詳細には、取付脚部34,35,36は、モータ収容部32から径方向外側に突出する。取付脚部34,35,36は、車両に固定される部分である。このように、本実施形態によれば、モータケース30が取付脚部34,35,36を有するため、電動アクチュエータ10を車両に取り付けるためのブラケットが不要である。これにより、電動アクチュエータ10を取り付ける際の部品点数を少なくできる。したがって、本実施形態によれば、車両に取り付ける手間を低減できる構造を有する電動アクチュエータ10が得られる。
また、モータ部40を収容するモータケース30に取付脚部34,35,36が設けられるため、モータ部40の振動が車両に伝わるまでの距離を短くできる。したがって、モータ部40の振動が増幅されて車両に伝わることが抑制される。また、車両のうち電動アクチュエータ10が取り付けられる部分の形状が変わった場合であっても、モータケース30のみを交換することで容易に対応できる。
図2に示すように、取付脚部34,35,36は、軸方向Zに沿って視て、ハウジング本体11aの外側、すなわち回路基板ケース20の外側に突出する。そのため、電動アクチュエータ10を安定して車両に取り付けやすい。取付脚部34,35,36の少なくとも1つは、軸方向Zに沿って視て、ハウジング本体11aの隣り合う角部同士の間の部分からハウジング本体11aの外側に突出する。そのため、取付脚部34,35,36が軸方向Zに沿って視てハウジング本体11aの角部から突出する場合に比べて、電動アクチュエータ10を小型化しやすい。本実施形態では、取付脚部34,35,36のすべてが、軸方向Zに沿って視て、ハウジング本体11aの隣り合う角部同士の間の部分からハウジング本体11aの外側に突出する。
なお、本実施形態においてハウジング本体11aの隣り合う角部は、回路基板ケース20の隣り合う角部に相当し、取付脚部34,35,36は、軸方向Zに沿って視て、回路基板ケース20の隣り合う角部同士の間の部分から回路基板ケース20の外側に突出する。
図7に示すように、取付脚部34は、モータ収容部32から径方向外側に突出する。本実施形態において取付脚部34は、径方向のうち第1方向Xに突出する。取付脚部34の幅は、軸方向Zに沿って視て、径方向外側に向かうに従って小さくなる。取付脚部34には、車両固定用のネジが通される貫通孔が設けられる。
取付脚部35は、モータ収容部32から下側に突出する軸方向突出部35aと、軸方向突出部35aの下側の端部から径方向外側に突出する径方向突出部35bと、を有する。本実施形態において径方向突出部35bは、径方向のうち第2方向Yに突出する。径方向突出部35bの幅は、軸方向Zに沿って視て、径方向外側に向かうに従って小さくなる。径方向突出部35bには、車両固定用のネジが通される貫通孔が設けられる。
取付脚部36は、モータ収容部32から下側に突出する軸方向突出部36aと、軸方向突出部36aの下側の端部から径方向外側に突出する径方向突出部36bと、を有する。軸方向突出部36aは、軸方向突出部35aよりも下側に突出する。本実施形態において径方向突出部36bは、径方向のうち第1方向Xと第2方向Yとの両方と交差する方向に突出する。径方向突出部36bの幅は、軸方向Zに沿って視て、径方向外側に向かうに従って小さくなる。径方向突出部36bには、車両固定用のネジが通される貫通孔が設けられる。
取付脚部34,35,36の少なくとも1つは、軸方向Zに沿って視て、第1コネクタ部81と第2コネクタ部82との間に配置される。本実施形態では、取付脚部34が、軸方向Zに沿って視て、第1コネクタ部81と第2コネクタ部82との間に配置される。そのため、例えば、第1方向Xにおいて、取付脚部34が第1コネクタ部81および第2コネクタ部82と逆側に配置される場合に比べて、電動アクチュエータ10の第1方向Xの寸法を小さくしやすい。また、例えば、第2方向Yにおいて、取付脚部34が取付脚部35と逆側に配置される場合に比べて、電動アクチュエータ10の第2方向Yの寸法を小さくしやすい。また、取付脚部34が第1コネクタ部81と第2コネクタ部82との間に配置されることで、電動アクチュエータ10が第2方向Yに大型化することを抑制できる。
取付脚部34,35,36の少なくとも1つは、軸方向Zに沿って視て、面取り部21eからハウジング本体11aの外側、すなわち回路基板ケース20の外側に突出する。本実施形態では、取付脚部36が、軸方向Zに沿って視て、面取り部21eからハウジング本体11aの外側、すなわち回路基板ケース20の外側に突出する。そのため、面取りされない角部に取付脚部36が配置される場合に比べて、電動アクチュエータ10を小型化しやすい。
取付脚部34,35,36は、樹脂製である。本実施形態においてモータケース本体31と取付脚部34,35,36とは、射出成形によって一体的に成形される。すなわち、モータケース30は、モータケース本体31と取付脚部34,35,36とを有する樹脂部材を有し、その樹脂部材は、単一の部材である。そのため、モータケース本体31と取付脚部34,35,36とを射出成形によって容易に作ることができる。
図3に示すように、ステータ固定部材37は、底部を有し上側に開口する筒状である。ステータ固定部材37は、中心軸J1を中心とする円筒状である。ステータ固定部材37は、モータ収容部32の内側に嵌め合わされる。ステータ固定部材37の底部には周方向に沿って配置される複数の貫通孔が設けられる。ステータ固定部材37の貫通孔には、モータ収容部32の底部に設けられた複数の突起がそれぞれ嵌め合わされる。
ステータ固定部材37の上側の端部は、モータ収容部32よりも上側に突出する。ステータ固定部材37の底部には、第2ベアリング44bが保持される。ステータ固定部材37の内周面には、ステータ43の外周面が固定される。ステータ固定部材37は、金属製である。モータケース30は、例えば、金型にステータ固定部材37が挿入された状態で樹脂が流し込まれるインサート成形によって作られる。
バスバーホルダ90は、ステータ固定部材37の上側の開口に配置される。バスバーホルダ90は、中心軸J1を中心とする円環状であり、板面が軸方向Zと直交する板状である。バスバーホルダ90は、図示しないバスバーを保持する。バスバーホルダ90は、ステータ43の上側を覆う。
本発明は上述の実施形態に限られず、他の構成を採用することもできる。ハウジング本体は、単一の部材であってもよい。ハウジング本体は、射出成形により単体で作られてもよい。この場合、金属部材は、ハウジング本体が作られた後に、ハウジング本体に保持される。ハウジング本体の形状としては、軸方向に沿って視て、四角形の少なくとも1つの角部が面取りされた形状を採用できる。すなわち、ハウジング本体の形状は、軸方向に沿って視て、四角形の2つ以上の角部が面取りされた形状であってもよい。ハウジング本体は、軸方向に沿って視て、五角形以外の多角形状であってもよい。ハウジング本体は、樹脂製でなくてもよく、例えば、金属製であってもよい。
取付脚部は、特に限定されない。複数の取付脚部が、軸方向に沿って視て、ハウジング本体の面取り部から突出してもよいし、第1コネクタ部と第2コネクタ部との間から突出してもよい。取付脚部は、モータケース本体と別部材であってもよい。取付脚部の数は、特に限定されない。取付脚部は、設けられなくてもよい。
金属部材は、特に限定されない。金属部材は、複数の別部材が連結されて構成されてもよい。金属部材は、設けられなくてもよい。第1ベアリング、第2ベアリング、第3ベアリングおよび第4ベアリングは、ボールベアリングでなくてもよく、滑り軸受等であってもよい。減速機構の構成は、特に限定されない。
出力シャフトのうち被駆動シャフトが挿入される開口部は、上側に開口してもよい。モータシャフトは、軸方向に沿って視て、ハウジング本体の角部に配置されてもよい。回路基板は、モータ部の下側に配置されてもよい。
上述した実施形態の電動アクチュエータの用途は、特に限定されず、車両以外に搭載されてもよい。また、上記の各構成は、相互に矛盾しない範囲内において、適宜組み合わせることができる。
10…電動アクチュエータ、11…ハウジング、11a…ハウジング本体、34,35,36…取付脚部、40…モータ部、41…モータシャフト、50…減速機構、53…出力ギア、60…出力部、61…出力シャフト、62…駆動ギア、81…第1コネクタ部、82…第2コネクタ部、D…対角線、Z…軸方向
Claims (6)
- 軸方向に延びるモータシャフトを有するモータ部と、
前記モータシャフトの軸方向一方側に連結される減速機構と、
前記減速機構を介して前記モータシャフトの回転が伝達される出力シャフトを有する出力部と、
前記モータ部、前記減速機構、および前記出力部を収容するハウジングと、
を備え、
前記出力シャフトは、前記モータシャフトの軸方向に延び、
前記ハウジングは、軸方向に沿って視て多角形状のハウジング本体を有し、
前記モータシャフトと前記出力シャフトとは、軸方向に沿って視て、前記ハウジング本体の対角線に沿って並んで配置され、
前記出力シャフトは、軸方向に沿って視て、前記ハウジング本体の角部に配置される、電動アクチュエータ。 - 前記減速機構は、前記モータシャフトの回転が減速されて伝達される出力ギアを有し、
前記出力部は、前記出力シャフトに固定され前記出力ギアと噛み合う駆動ギアを有し、
前記駆動ギアは、前記出力シャフトから前記出力ギアに向かって延び、前記出力ギアに向かうに従って幅が大きくなる扇形ギアである、請求項1に記載の電動アクチュエータ。 - 前記モータシャフトは、軸方向に沿って視て、前記ハウジング本体の中央部に配置される、請求項1または2に記載の電動アクチュエータ。
- 外部装置が接続される第1コネクタ部および第2コネクタ部をさらに備え、
前記第1コネクタ部と前記第2コネクタ部とは、軸方向に沿って視て、前記ハウジング本体よりも外側に突出し、かつ、軸方向と直交する方向に並んで配置され、
前記ハウジングは、軸方向に沿って視て前記ハウジング本体の外側に突出する複数の取付脚部を有し、
前記取付脚部の少なくとも1つは、軸方向に沿って視て、前記第1コネクタ部と前記第2コネクタ部との間に配置される、請求項1から3のいずれか一項に記載の電動アクチュエータ。 - 前記ハウジング本体は、軸方向に沿って視て、四角形の少なくとも1つの角部が面取りされた形状であり、
前記取付脚部の少なくとも1つは、軸方向に沿って視て、前記面取りされた部分から前記ハウジング本体の外側に突出する、請求項4に記載の電動アクチュエータ。 - 前記取付脚部の少なくとも1つは、軸方向に沿って視て、前記ハウジング本体の隣り合う角部同士の間の部分から前記ハウジング本体の外側に突出する、請求項4または5に記載の電動アクチュエータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017253676A JP2019122079A (ja) | 2017-12-28 | 2017-12-28 | 電動アクチュエータ |
| CN201822185008.6U CN209472494U (zh) | 2017-12-28 | 2018-12-25 | 电动致动器 |
| US16/234,596 US20190207474A1 (en) | 2017-12-28 | 2018-12-28 | Electric actuator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017253676A JP2019122079A (ja) | 2017-12-28 | 2017-12-28 | 電動アクチュエータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019122079A true JP2019122079A (ja) | 2019-07-22 |
Family
ID=67059983
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017253676A Pending JP2019122079A (ja) | 2017-12-28 | 2017-12-28 | 電動アクチュエータ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20190207474A1 (ja) |
| JP (1) | JP2019122079A (ja) |
| CN (1) | CN209472494U (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019122080A (ja) * | 2017-12-28 | 2019-07-22 | 日本電産トーソク株式会社 | 電動アクチュエータ |
| JP6898876B2 (ja) * | 2018-02-28 | 2021-07-07 | 住友重機械工業株式会社 | 偏心揺動型減速装置 |
| US20210036577A1 (en) * | 2018-04-27 | 2021-02-04 | Mitsubishi Electric Corporation | Electric motor |
| JP7204365B2 (ja) * | 2018-07-31 | 2023-01-16 | 富士通コンポーネント株式会社 | 電磁継電器 |
| JP2022121927A (ja) * | 2021-02-09 | 2022-08-22 | カワサキモータース株式会社 | 車両 |
| CN113790267A (zh) * | 2021-11-13 | 2021-12-14 | 杭州优协科技有限公司 | 一种新能源汽车用自动换档执行器 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8680727B2 (en) * | 2009-05-27 | 2014-03-25 | Cts Corporation | Brushless direct current actuator with clip for retaining bobbins |
| JP5943955B2 (ja) * | 2014-04-07 | 2016-07-05 | 三菱電機株式会社 | レンジ切り替え装置 |
-
2017
- 2017-12-28 JP JP2017253676A patent/JP2019122079A/ja active Pending
-
2018
- 2018-12-25 CN CN201822185008.6U patent/CN209472494U/zh not_active Expired - Fee Related
- 2018-12-28 US US16/234,596 patent/US20190207474A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20190207474A1 (en) | 2019-07-04 |
| CN209472494U (zh) | 2019-10-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019122081A (ja) | 電動アクチュエータ | |
| JP2019122079A (ja) | 電動アクチュエータ | |
| JP2019122078A (ja) | 電動アクチュエータ | |
| US10715003B2 (en) | Electric actuator | |
| JP2019122080A (ja) | 電動アクチュエータ | |
| US10591031B2 (en) | Electric actuator | |
| US10483823B2 (en) | Electric actuator | |
| JP7110872B2 (ja) | 電動アクチュエータ | |
| US10794465B2 (en) | Electric actuator | |
| JP7214961B2 (ja) | 電動アクチュエータ | |
| US11408485B2 (en) | Electric actuator | |
| JP7155518B2 (ja) | 電動オイルポンプ | |
| JP2019122077A (ja) | 電動アクチュエータ、およびアクチュエータ装置 | |
| CN209805579U (zh) | 电动致动器 | |
| CN112583187A (zh) | 马达单元 | |
| JP7098998B2 (ja) | 電動アクチュエータ | |
| US20200153294A1 (en) | Rotor and motor | |
| JP2019068520A (ja) | モータおよび電動アクチュエータ | |
| JP7091799B2 (ja) | 電動アクチュエータ | |
| CN114337089A (zh) | 电动致动器 | |
| JP2014059179A (ja) | トルク検出装置、および同装置を備えるステアリング装置 | |
| CN213243763U (zh) | 电动致动器 | |
| JP2019047635A (ja) | ロータおよびモータ | |
| JP7283304B2 (ja) | 電動アクチュエータ | |
| JP7284578B2 (ja) | サーボモータ |