JP2019093531A - ワーク加工システム及びワーク加工方法 - Google Patents
ワーク加工システム及びワーク加工方法 Download PDFInfo
- Publication number
- JP2019093531A JP2019093531A JP2017227302A JP2017227302A JP2019093531A JP 2019093531 A JP2019093531 A JP 2019093531A JP 2017227302 A JP2017227302 A JP 2017227302A JP 2017227302 A JP2017227302 A JP 2017227302A JP 2019093531 A JP2019093531 A JP 2019093531A
- Authority
- JP
- Japan
- Prior art keywords
- work
- workpiece
- horizontal
- supported
- support device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003672 processing method Methods 0.000 title claims abstract description 5
- 230000007246 mechanism Effects 0.000 claims abstract description 57
- 238000000034 method Methods 0.000 claims description 7
- 238000003754 machining Methods 0.000 claims description 5
- 230000003028 elevating effect Effects 0.000 claims description 4
- 238000005553 drilling Methods 0.000 description 4
- 238000004904 shortening Methods 0.000 description 2
- 238000001179 sorption measurement Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000009966 trimming Methods 0.000 description 1
Images








Landscapes
- Jigs For Machine Tools (AREA)
- Feeding Of Workpieces (AREA)
Abstract
Description
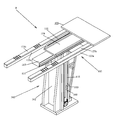
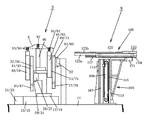
図1乃至図4に示すように、ワーク加工システム1は、ワーク5を位置決め状態で保持(支持)するワーク支持装置3、該ワーク支持装置3の図示する後方に配置され、保持されたワーク5にバリ取り加工、穿設加工等の各種加工を実行する少なくとも1台の産業ロボット7(図は1台を配置した例を示す。)、ワーク支持装置3から加工済みのワーク5を上方へ持ち上げて次に加工されるワーク5をセット可能にする持上げ装置9から構成される。
3 ワーク支持装置
5 ワーク
7 産業ロボット
9 持上げ装置
11 本体フレーム
13・15 第1及び第2前後フレーム
17・19 第1及び第2前後可動体
21・23 第1及び第2電動モータ
25・27 第1及び第2左右フレーム
29・31 第1及び第2左右可動体
33・35 第3及び第4電動モータ
37・39 第1及び第2上下フレーム
41・43 第1及び第2上下可動体
45・47 第5及び第6電動モータ
49・51 第1及び第2取付けアーム
53・55 保持部材
57 第3左右フレーム
61・63 第3及び第4左右可動体
65・67 第7及び第8電動モータ
69・71 第3及び第4上下フレーム
73・75 第3及び第4上下可動体
77・79 第9及び第10電動モータ
81・83 第3及び第4取付けアーム
85・87 保持部材
89 第3前後フレーム
91 第3前後可動体
93 第11電動モータ
95 第5取付けアーム
97 保持部材
99 アーム
101 ワーク加工部材
103 昇降機構部
105 水平機構部
107 上下フレーム
109 上下可動体
111 第12電動モータ
113 水平機構取付け体
115 ベルト部材としてのタイミングベルト
117 水平フレーム
119 水平可動体
121 第13電動モータ
123 アーム取付け可動体
123a 持上げアーム
123b 弾性体
125 ベルト部材としてのタイミングベルト
Claims (9)
- ワークを位置決め状態で支持(保持)する少なくとも3個の保持部材を備えたワーク支持装置と、
ワーク支持装置に支持(保持)されたワークの所定箇所を加工する少なくとも1台の産業ロボットと、
からなるワーク加工システムにおいて、
ワーク支持装置に支持(保持)された加工済みワークの下方に持上げアームを進入させて加工済みワークを上方へ持ち上げ可能な持上げ装置を備え、
該持上げ装置は、
持上げアームをワーク支持装置に支持(保持)された加工済みワークの下方位置とワーク支持装置の上方に、次位のワークを搬入可能にする空間を形成する上方位置の間で昇降する昇降機構部と、
上記昇降機構部に設けられ、下方位置に移動した持上げアームをワーク支持装置に支持(保持)された加工済みのワーク下方へ進入させる前進位置と上方位置へ移動し、加工済みワークを支持(保持)した持上げアームをワーク支持装置から離脱してワーク支持装置上方に次位のワークを搬入可能にする空間を形成する後退位置の間で移動する水平機構部と、
を備えたワーク加工システム。 - 請求項1において、
昇降機構部は、ワーク支持装置に支持(保持)されたワーク高さに対応する上下長さの上下フレームと、基端部が上下フレームに対して昇降可能に支持され、基端部が上下フレームの上方位置へ移動された際に、ワークをワーク支持装置から離間した上方へ移動可能な上下長さからなる水平機構取付け体とからなり、該水平機構取付け体に水平機構部を取り付けたワーク加工システム。 - 請求項1において、
昇降機構部は、ワーク支持装置において最下方位置にて支持(保持)されたワーク下端に対応する上下長さの上下フレームと、該上下フレームと同程度の上下長さで、上下フレームに対して基端部が上下フレームの上下高さに対応するストロークで昇降可能に支持される上下可動体と、該上下可動体と同程度の上下長さで、上下可動体に対して基端部が上下可動体の上下長さに対応するストロークで昇降可能に支持され、水平機構部が取り付けられる水平機構取付け体と、上記上下可動体の上下端部にそれぞれ回転可能に軸支された回転体に掛渡され、一部が上下フレームに固定されると共に他部が水平機構取付け体にそれぞれ固定されるベルト部材とからなり、上下フレームに対する上下可動体の昇降に伴って走行するベルト部材により、上下可動体に対して水平機構取付け体を昇降可能にしたワーク加工システム。 - 請求項1乃至3のいずれかにおいて、
水平機構部は、昇降機構部からワーク支持装置に支持(保持)されたワークとの非干渉位置に至る水平長さからなる水平フレームと、該水平フレームに基端部が水平移動可能に支持され、基端部が水平フレームにおけるワーク支持装置側へ移動された際に、支持されたワーク下方に進入可能な長さからなる持上げアームとからなるワーク加工システム。 - 請求項1乃至3のいずれかにおいて、
水平機構部は、昇降機構部からワーク支持装置に支持(保持)されたワーク下方に至る間隔の1/2と同程度の水平長さからなる水平フレームと、該水平フレームと同程度の水平長さで、水平フレームに対して基端部が水平フレームの水平長さに対応するストロークで移動可能に支持される水平可動体と、該水平可動体と同程度の水平長さで、水平可動体に対して基端部が該水平可動体の水平長さに対応するストロークで移動可能に支持される持上げアームと、上記水平可動体の長手方向両端部にそれぞれ回転可能に軸支された回転体に掛渡され、一部が水平フレームに固定されると共に他部が持上げアームの基端部にそれぞれ固定されるベルト部材とからなり、水平フレームに対する水平可動体の移動に伴って走行するベルト部材により、水平可動体に対して持上げアームを水平移動可能にしたワーク加工システム。 - 請求項1において、
ワーク支持装置は、支持(保持)されるワークの長手直交方向一方側における長手方向両側にて長手直交方向、長手方向及び上下方向へそれぞれ移動可能に設けられる保持部材と、ワークの長手直交方向他方側における長手方向両側にて長手方向及び上下方向へそれぞれ移動可能に設けられる保持部材と、支持(保持)するワークに対応してそれぞれの保持部材を所定の方向へ移動してワークを支持(保持)可能としたワーク加工システム。 - 請求項6において、
ワーク支持装置の中央部には、ワークの長手直交方向で、ワークの中央部裏面を支持(保持)可能な高さの保持部材を設けたワーク加工システム。 - 請求項1、6及び7のいずれかにおいて、
ワーク支持装置の長手方向両側には、支持(保持)されるワークの長手方向各端部を固定するクランプ部材をそれぞれ設けたワーク加工システム。 - ワーク支持装置の少なくとも3個の保持部材により位置決め状態で支持(保持)されたワークの所定箇所を、少なくとも1台の産業ロボットにより加工するワーク加工システムにおいて、
ワーク支持装置に支持(保持)されたワークの加工が終了した際に、
持上げ装置の水平機構部を前進作動して持上げアームを加工済みワークの下方へ進入させる、
上記状態にて持上げ装置の昇降機構部を作動して加工済みワークの下方に進入した持上げアームを上方へ移動して加工済みワークをワーク支持装置上方へ移動させる、
上記状態にて持上げ装置の水平機構部を後退作動して加工済みワークを支持した持上げアームをワーク支持装置上方から離間する位置へ移動させる、
ワーク支持装置に対し、次位のワークが搬入可能な空間を形成する、
ことを特徴とするワーク加工方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017227302A JP7150297B2 (ja) | 2017-11-28 | 2017-11-28 | ワーク加工システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017227302A JP7150297B2 (ja) | 2017-11-28 | 2017-11-28 | ワーク加工システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019093531A true JP2019093531A (ja) | 2019-06-20 |
| JP2019093531A5 JP2019093531A5 (ja) | 2020-07-27 |
| JP7150297B2 JP7150297B2 (ja) | 2022-10-11 |
Family
ID=66970544
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017227302A Active JP7150297B2 (ja) | 2017-11-28 | 2017-11-28 | ワーク加工システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7150297B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114589845A (zh) * | 2022-01-22 | 2022-06-07 | 宜春市美源吉体育用品有限公司 | 一种自动开模机及其应用系统 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61274857A (ja) * | 1985-05-08 | 1986-12-05 | Nissan Motor Co Ltd | トランスフア装置のワーク移載装置 |
| JPS6274556A (ja) * | 1985-09-24 | 1987-04-06 | Mitsubishi Heavy Ind Ltd | 自動搬送装置 |
| JPH0463339U (ja) * | 1990-10-05 | 1992-05-29 | ||
| JPH04201162A (ja) * | 1990-11-30 | 1992-07-22 | Makino Milling Mach Co Ltd | 倍速送り装置 |
| JPH04109836U (ja) * | 1991-03-06 | 1992-09-24 | 三菱自動車工業株式会社 | 工作機械のワーク払い出し装置 |
| JPH0768402A (ja) * | 1993-09-07 | 1995-03-14 | Shin Nippon Koki Kk | 旋盤への工作物の取付け装置 |
| JPH1135020A (ja) * | 1997-07-11 | 1999-02-09 | Ishida Co Ltd | ラベル貼付装置 |
| JP2002292541A (ja) * | 2001-03-30 | 2002-10-08 | Nippei Toyama Corp | 工作機械におけるワーク搬出装置 |
| JP2014014908A (ja) * | 2012-07-11 | 2014-01-30 | Star Techno Co Ltd | ワーク支持装置 |
-
2017
- 2017-11-28 JP JP2017227302A patent/JP7150297B2/ja active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61274857A (ja) * | 1985-05-08 | 1986-12-05 | Nissan Motor Co Ltd | トランスフア装置のワーク移載装置 |
| JPS6274556A (ja) * | 1985-09-24 | 1987-04-06 | Mitsubishi Heavy Ind Ltd | 自動搬送装置 |
| JPH0463339U (ja) * | 1990-10-05 | 1992-05-29 | ||
| JPH04201162A (ja) * | 1990-11-30 | 1992-07-22 | Makino Milling Mach Co Ltd | 倍速送り装置 |
| JPH04109836U (ja) * | 1991-03-06 | 1992-09-24 | 三菱自動車工業株式会社 | 工作機械のワーク払い出し装置 |
| JPH0768402A (ja) * | 1993-09-07 | 1995-03-14 | Shin Nippon Koki Kk | 旋盤への工作物の取付け装置 |
| JPH1135020A (ja) * | 1997-07-11 | 1999-02-09 | Ishida Co Ltd | ラベル貼付装置 |
| JP2002292541A (ja) * | 2001-03-30 | 2002-10-08 | Nippei Toyama Corp | 工作機械におけるワーク搬出装置 |
| JP2014014908A (ja) * | 2012-07-11 | 2014-01-30 | Star Techno Co Ltd | ワーク支持装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114589845A (zh) * | 2022-01-22 | 2022-06-07 | 宜春市美源吉体育用品有限公司 | 一种自动开模机及其应用系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7150297B2 (ja) | 2022-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6693777B2 (ja) | ワーク加工装置 | |
| US8523499B2 (en) | Working device | |
| TWI477350B (zh) | 進給裝置及應用該進給裝置之機床 | |
| JP2017164828A5 (ja) | ||
| JP5766156B2 (ja) | ワーク支持装置 | |
| EP2699070A2 (en) | Work processing apparatus | |
| KR101095690B1 (ko) | 3축 로봇 및 이를 이용한 갠트리형 공작 시스템 | |
| EP2735421A2 (en) | Apparatus for removing resin molded product and method for removing resin molded product | |
| CN205571925U (zh) | 一种双工作台动柱立式加工中心机床 | |
| JP2019093531A (ja) | ワーク加工システム及びワーク加工方法 | |
| KR20120067995A (ko) | 기어 제작을 위한 장치 | |
| CN106625640B (zh) | 一种一组动力源可完成三维运动的机器人抓手 | |
| CN205573441U (zh) | 一种玻璃精雕机自动上下料装置 | |
| JP2820828B2 (ja) | 長尺の被加工品における端部加工面の回転位置決め装置 | |
| JP2019093531A5 (ja) | ||
| JP2015100890A (ja) | ワーク支持装置 | |
| JP5943499B1 (ja) | ワーク支持装置 | |
| JP5822288B2 (ja) | ワーク支持装置 | |
| CN209756585U (zh) | 一种带自动上下料机械手的数控精雕机 | |
| KR20150049103A (ko) | 절단 겸용 직교방향 가공장치 | |
| CN220592278U (zh) | 一种工件加工装置 | |
| JP2020114624A (ja) | 集塵装置及びその集塵装置を備えたワーク加工装置 | |
| JP4303077B2 (ja) | センタレス研削盤のローディング装置 | |
| JP5656268B2 (ja) | 産業ロボット | |
| JP2006218616A (ja) | 複合作業機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200610 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200610 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20200610 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210324 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210526 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211006 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211125 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220318 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220608 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20220608 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20220615 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20220616 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220808 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220824 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220902 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220920 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7150297 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |