JP2018526653A - 誘導表面波を用いた地理的位置 - Google Patents
誘導表面波を用いた地理的位置 Download PDFInfo
- Publication number
- JP2018526653A JP2018526653A JP2018513320A JP2018513320A JP2018526653A JP 2018526653 A JP2018526653 A JP 2018526653A JP 2018513320 A JP2018513320 A JP 2018513320A JP 2018513320 A JP2018513320 A JP 2018513320A JP 2018526653 A JP2018526653 A JP 2018526653A
- Authority
- JP
- Japan
- Prior art keywords
- surface wave
- receiving structure
- induced
- guided surface
- guided
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S1/00—Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions, or position lines fixed relatively to the beacon transmitters; Receivers co-operating therewith
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S1/00—Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions, or position lines fixed relatively to the beacon transmitters; Receivers co-operating therewith
- G01S1/02—Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions, or position lines fixed relatively to the beacon transmitters; Receivers co-operating therewith using radio waves
- G01S1/08—Systems for determining direction or position line
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0221—Receivers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/06—Position of source determined by co-ordinating a plurality of position lines defined by path-difference measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Automation & Control Theory (AREA)
- Signal Processing (AREA)
- Radar Systems Or Details Thereof (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
現在位置を識別するナビゲーションの各種手法を開示する。ナビゲーションデバイスは誘導表面波受信構造を用いて誘導表面波を受信する。ナビゲーションデバイスは次に、誘導表面波受信構造を用いて誘導表面波の反射を受信する。ナビゲーションデバイスは、誘導表面波の受信と誘導表面波の反射の受信との間の経過時間を計算する。ナビゲーションデバイスは次に、誘導表面波の波面と地球の極軸との間の角度を測定する。最終的に、ナビゲーションデバイスは、誘導表面波の波面と地球の極軸との間の角度及び誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づいて、誘導表面波受信構造の位置を判定する。
Description
(関連出願の相互参照)
本出願は、2016年9月10日に出願され「Geolocation with Guided Surface Waves」と題された米国特許出願第14/850,056号の優先権及び利益を主張するものであり、本明細書でその内容全体が記載されるかのように参照によって組み込まれる。
本出願は、2016年9月10日に出願され「Geolocation with Guided Surface Waves」と題された米国特許出願第14/850,056号の優先権及び利益を主張するものであり、本明細書でその内容全体が記載されるかのように参照によって組み込まれる。
本出願は、2013年3月7日に出願され出願番号第13/789,538号が付与され、公開番号第2014/0252886(A1)号として2014年9月11日に公開された「Excitation and Use of Guided Surface Wave Modes on Lossy Media」と題された同時係属中の米国特許非仮出願に関連し、その出願は、参照によりその全体が本明細書に組み込まれる。本出願はまた、2013年3月7日に出願され出願番号第13/789,525号が付与され、公開番号第2014/0252865(A1)号として2014年9月11日に公開された「Excitation and Use of Guided Surface Wave Modes on Lossy Media」と題された同時係属中の米国特許非仮出願に関連し、その出願は、参照によりその全体が本明細書に組み込まれる。本出願は更に、2014年9月10日に出願され出願番号第14/483,089号が付与された「Excitation and Use of Guided Surface Wave Modes on Lossy Media」と題された同時係属中の米国特許非仮出願に関連し、その出願は、参照によりその全体が本明細書に組み込まれる。本出願は更に、2015年6月2日に出願され出願番号第14/728,507号が付与された「Excitation and Use of Guided Surface Waves」と題された同時係属中の米国特許非仮出願に関連し、その出願は、参照によりその全体が本明細書に組み込まれる。本出願は更に、2015年6月2日に出願され出願番号第14/728,492号が付与された「Excitation and Use of Guided Surface Waves」と題された同時係属中の米国特許非仮出願に関連し、その出願は、参照によりその全体が本明細書に組み込まれる。
一世紀以上にわたり、電波によって伝送される信号は、従来のアンテナ構造を使用して送出される放射電磁界を伴っていた。無線科学とは対照的に、前世紀の電力分配システムは、導電体に沿って誘導されたエネルギの伝送を伴った。無線周波数(radio frequency)(RF)と送電との間のこの差異の理解は、1900年代初頭から存在していた。
誘導表面波を用いて地理的位置を実行するシステムを開示する。システムは、損失性導電媒体の上に持ち上げられた帯電端子と、帯電端子と損失性導電媒体との間を結合された受信器ネットワークであって、帯電端子の近傍にある損失性導電媒体の特性に少なくとも部分的に基づくウェーブチルト角(Ψ)であって誘導表面波に関連付けられたウェーブチルト角(Ψ)と合致する位相遅延(Φ)を有する、受信器ネットワークと、コンパスと、プロセッサと、メモリと、メモリに記憶され、プロセッサによって実行可能なアプリケーションと、を備えることができ、アプリケーションは、プロセッサに実行されると、少なくとも、誘導表面波受信構造を用いて誘導表面波を受信することと、誘導表面波受信構造を用いて誘導表面波の反射を受信することと、誘導表面波の受信と誘導表面波の反射の受信との間の経過時間を計算することと、誘導表面波の波面と地球の極軸との間の角度を測定することと、誘導表面波の波面と地球の極軸との間の角度及び誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づいて誘導表面波受信構造の位置を判定することと、のアクションをシステムに実行させる。1つ以上の実施形態では、アプリケーションは、プロセッサによって実行されるとき、システムに、少なくとも、誘導表面波受信構造の位置での伏角の値を測定させ、誘導表面波受信構造の位置の判定は、少なくとも部分的に伏角の値に更に基づくものである。1つ以上の実施形態では、アプリケーションは、プロセッサによって実行されるとき、システムに、誘導表面波受信構造の範囲内の無線伝送タワーの識別情報に少なくとも部分的に基づいて、誘導表面波受信構造の大体の位置を少なくとも更に識別させる。これらの実施形態のいくつかでは、システムに誘導表面波受信構造の位置を判定させることは、誘導表面波受信構造の大体の位置に更に少なくとも部分的に基づくものである。1つ以上の実施形態では、アプリケーションは、プロセッサによって実行されるとき、システムに、誘導表面波受信構造の範囲内のセルラーネットワークタワーの識別情報に少なくとも部分的に基づいて、少なくとも、誘導表面波受信構造の大体の位置を更に識別させる。これらの実施形態のいくつかでは、システムに誘導表面波受信構造の位置を判定させることは、誘導表面波受信構造の大体の位置に更に少なくとも部分的に基づくものである。1つ以上の実施形態では、アプリケーションは、プロセッサによって実行されるとき、システムに、システムのメモリに記憶され、かつシステムに関連付けられた慣性データに少なくとも部分的に基づいて、少なくとも、システムの大体の位置を更に識別させる。これらの実施形態のいくつかでは、システムに誘導表面波受信構造の位置を判定させることは、システムの大体の位置に更に少なくとも部分的に基づくものである。1つ以上の実施形態では、システムにシステムの位置を判定させることは、誘導表面波の受信間の経過時間に少なくとも部分的に基づくものである。これらの実施形態のいくつかでは、誘導表面波の反射の受信は、プロセッサに、少なくとも、時間を二分割させ、半分の時間を生成させることと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と受信器ネットワークとの間の距離を生成させることと、対蹠地と受信器ネットワークとの間の距離を地球の円周の半分に等しい値から引いて、誘導表面波に関連付けられたプローブと受信器ネットワークとの間の距離を生成させることと、プローブを中心とする、プローブとシステムとの間の距離に等しい半径を有する円の周に沿ってシステムの位置を設定させることと、を更に含む。1つ以上の実施形態では、システムにシステムの判定を決定させることは、誘導表面波の受信間の経過時間に少なくとも部分的に基づくものである。これらの実施形態のいくつかでは、誘導表面波の反射の受信は、プロセッサに、少なくとも、時間を二分割し、半分の時間を生成させることと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と受信器ネットワークとの間の距離を生成させることと、システムの位置を、対蹠地を中心とする、対蹠地とシステムとの間の距離に等しい半径を有する円の周に沿って設定させることと、を更に含む。
誘導表面波を用いて地理的位置を実行する方法を開示する。方法は、誘導表面波受信構造を用いて誘導表面波を受信することと、誘導表面波受信構造を用いて誘導表面波の反射を受信することと、誘導表面波の受信と誘導表面波の反射の受信との間の経過時間を計算することと、誘導表面波の波面と地球の極軸との間の角度を測定することと、誘導表面波受信構造の位置を、誘導表面波の波面と地球の極軸との間の角度及び誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づいて判定することと、を含むことができる。1つ以上の実施形態では、方法は、誘導表面波受信構造の位置での伏角の値を測定することを更に含み、誘導表面波受信構造の位置の判定は更に、伏角の値に少なくとも部分的に基づくものである。1つ以上の実施形態では、方法は、誘導表面波受信構造の範囲内のセルラーネットワークタワーの識別情報に少なくとも部分的に基づいて、誘導表面波受信構造の大体の位置を識別することを更に含む。これらの実施形態のいくつかでは、誘導表面波受信構造の位置を判定することは、誘導表面波受信構造の大体の位置に少なくとも部分的に更に基づくものである。1つ以上の実施形態では、方法は、誘導表面波受信構造の範囲内の無線伝送タワーの識別情報に少なくとも部分的に基づいて、誘導表面波受信構造の大体の位置を識別することを更に含む。これらの実施形態のいくつかでは、誘導表面波受信構造の位置を判定することは、誘導表面波受信構造の大体の位置に少なくとも部分的に更に基づくものである。1つ以上の実施形態では、方法は、誘導表面波受信構造に関連付けられた慣性データに少なくとも部分的に基づいて、誘導表面波受信構造の大体の位置を識別することを更に含む。これらの実施形態のいくつかでは、誘導表面波受信構造の位置を判定することは、誘導表面波受信構造の大体の位置に少なくとも部分的に更に基づくものである。1つ以上の実施形態では、誘導表面波受信構造の位置を判定することが誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づくことは、少なくとも、時間を二分割し、半分の時間を生成することと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と誘導表面波受信構造との間の距離を生成することと、対蹠地と誘導表面波受信構造との間の距離を地球の円周の半分に等しい値から引いて、誘導表面波に関連付けられたプローブと誘導表面波受信構造との間の距離を生成することと、プローブを中心とする、プローブと誘導表面波受信構造との間の距離に等しい半径を有する円の周に沿って誘導表面波受信構造の位置を設定することと、を更に含む。1つ以上の実施形態では、誘導表面波受信構造の位置を判定することが誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づくことは、時間を二分割し、半分の時間を生成することと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と誘導表面波受信構造との間の距離を生成することと、誘導表面波受信構造の位置を、対蹠地を中心とする、対蹠地と誘導表面波受信構造との間の距離に等しい半径を有する円の周に沿って設定することと、を更に含む。
誘導表面波を用いて地理的位置を識別する装置を開示する。装置は、テレストリアル媒体に沿って進行する誘導表面波から電気的エネルギを得るように構成された誘導表面波受信構造と、プロセッサと、メモリと、コンパスと、メモリに記憶され、プロセッサによって実行されるとき、装置に、少なくとも、誘導表面波受信構造を用いて誘導表面波を受信させ、誘導表面波受信構造を用いて誘導表面波の反射を受信させ、誘導表面波の受信と誘導表面波の反射の受信との間の経過時間を計算させ、誘導表面波の波面と地球の極軸との間の角度を測定させ、誘導表面波の波面と地球の極軸との間の角度及び誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づいて、誘導表面波受信構造の位置を判定させる、アプリケーションと、を備えることができる。1つ以上の実施形態では、アプリケーションは、プロセッサによって実行されるとき、装置に、少なくとも、誘導表面波受信構造の位置での伏角の値を測定させ、誘導表面波受信構造の位置を判定することは、伏角の値に更に少なくとも部分的に基づくものである。1つ以上の実施形態では、装置に装置の位置を判定させることは、誘導表面波の受信間の経過時間に少なくとも部分的に基づくものである。これらの実施形態のいくつかでは、誘導表面波の反射の受信は、プロセッサに少なくとも、時間を二分割し、半分の時間を生成させることと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と誘導表面波受信構造との間の距離を生成させることと、装置の位置を、対蹠地を中心とする、対蹠地と装置との間の距離に等しい半径を有する円の周に沿って設定させることと、を更に含む。1つ以上の実施形態では、装置に装置の位置を判定させることは、誘導表面波の受信間の経過時間に少なくとも部分的に基づくものである。これらの実施形態のいくつかでは、誘導表面波の反射の受信は、プロセッサに、少なくとも、時間を二分割し、半分の時間を生成させることと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と誘導表面波受信構造との間の距離を生成させることと、対蹠地と誘導表面波受信構造との間の距離を地球の円周の半分に等しい値から引いて、誘導表面波に関連付けられたプローブと装置との間の距離を生成させることと、プローブを中心とする、プローブと装置との間の距離に等しい半径を有する円の周に沿って誘導表面波受信構造の位置を設定させることと、を更に含む。1つ以上の実施形態では、アプリケーションは、プロセッサによって実行されるとき、装置に、誘導表面波受信構造の範囲内のセルラーネットワークタワーの識別情報に少なくとも部分的に基づいて、少なくとも、誘導表面波受信構造の大体の位置を更に識別させる。これらの実施形態のいくつかでは、装置に誘導表面波受信構造の位置を判定させることは、誘導表面波受信構造の大体の位置に更に少なくとも部分的に基づくものである。1つ以上の実施形態では、アプリケーションは、プロセッサによって実行されるとき、装置に、システムのメモリに記憶され、かつ誘導表面波受信構造に関連付けられた慣性データに少なくとも部分的に基づいて、少なくとも、誘導表面波受信構造の大体の位置を更に識別させる。これらの実施形態のいくつかでは、装置に誘導表面波受信構造の位置を判定させることは、誘導表面波受信構造の大体の位置に更に少なくとも部分的に基づくものである。
本開示の他のシステム、方法、特徴、及び利点は、以下の図面及び詳細な説明を検討することにより当業者に明らかである、又は明らかになるであろう。このような付加的なシステム、方法、特徴、及び利点のすべては、この説明に含まれ、本開示の範囲内であり、添付の特許請求の範囲によって保護されることが意図されている。
加えて、記載された実施形態の任意選択のかつ好ましい特徴及び改良のすべては、本明細書で教示される本開示全体のすべての態様で利用可能である。更に、従属請求項の個別の特徴、並びに記載された実施形態のすべての任意選択のかつ好ましい特徴及び改良は、互いに組合せ可能かつ交換可能である。
本開示の多くの態様は、以下の図面を参照することにより、より良好に理解することができる。図面内の構成要素は、必ずしも正しい縮尺ではなく、本開示の原理を明確に例示することに重点が置かれている。更に、図面中で、同じ参照数字は、いくつかの図を通して対応する部分を指す。
初めに、以下の概念の説明における明瞭さを提供するために、いくつかの専門用語を規定する。最初に、本明細書で意図されるように、放射電磁界と誘導電磁界との間に形式的区別がなされる。
本明細書で意図されるように、放射電磁界は、導波路に拘束されていない波動の形態で発生源の構造から放出された電磁エネルギを含む。例えば、放射電磁界は、一般的に、アンテナなどの電気的構造を出て、大気又は他の媒体を介して伝搬する電界であり、なんらの導波路構造に拘束されていない。放射された電磁波は、アンテナなどの電気的構造を離れると、発生源が動作し続けるか否かに関わらず、消散するまで、その発生源と無関係に伝搬の媒体(空気などの)内を伝搬し続ける。電磁波は、放射されると、遮断されない限り回収できず、遮断されない場合、放射された電磁波に固有のエネルギは、永久に失われる。アンテナなどの電気構造は、放射抵抗と構造損失抵抗の比を最大化することにより、電磁界を放射するように設計される。放射されたエネルギは、空間に広がって、受信器が存在するか否かに関わらず、失われる。放射された電界のエネルギ密度は、幾何学的拡大に起因する距離の関数である。したがって、本明細書で使用するとき、そのすべての形態における「放射する」という用語は、電磁伝搬のこの形態を指す。
誘導電磁界は、異なる電磁特性を有する媒体の間の境界内又はその付近にエネルギが集中した、伝搬する電磁波である。この意味で、誘導電磁界は、導波路に拘束されたものであり、導波路内を流れる電流によって搬送されるとして特徴付けることができる。誘導電磁波内で搬送されるエネルギを受信及び/又は消散する負荷が存在しない場合、誘導媒体の導電率で消散したエネルギ以外は、エネルギは失われない。別の言い方をすれば、誘導電磁波に対して負荷が存在しない場合、エネルギは消費されない。したがって、誘導電磁界を生成する発生器又は他の発生源は、抵抗負荷が存在しない限り、実際の電力を送出しない。そのため、そのような発生器又は他の発生源は、負荷が提示されるまで、本質的に空転する。これは、電気的負荷が存在しない電力線にわたって伝送される60ヘルツの電磁波を生成するように発生器を動作させることに類似している。誘導電磁界又は誘導電磁波は、「伝送線モード」と呼ばれるものと等価であることに留意されたい。これは、放射波を生成するために常に実際の電力が供給される放射電磁波と対照的である。放射電磁波とは異なり、誘導電磁エネルギは、エネルギ源がオフにされた後で、有限の長さの導波路に沿って伝搬し続けない。したがって、本明細書で使用するとき、そのすべての形態における「誘導する」という用語は、電磁伝搬のこの伝送モードを指す。
ここで図1を参照して、放射電磁界と誘導電磁界との間の差異を更に示すために、対数dBグラフ上のキロメートルでの距離の関数として、1メートル当たりのボルトでの任意指示を上回るデシベル(dB)での電界強度のグラフ100を示す。図1のグラフ100は、距離の関数として誘導電磁界の電界強度を示す誘導電界強度曲線103を示す。この誘導電界強度曲線103は、伝送線モードと本質的に同じである。また、図1のグラフ100は、距離の関数として放射電磁界の電界強度を示す放射電界強度曲線106を示す。
誘導波及び放射伝搬それぞれに対する曲線103及び106の形状が興味深い。放射電界強度曲線106は、幾何級数的に低下(1/d、式中dは距離である)し、これは、両対数目盛上で直線として示されている。一方、誘導電界強度曲線103は、

の特徴的な指数関数的減衰を有し、両対数目盛上で独特の屈曲部109を呈する。誘導電界強度曲線103及び放射電界強度曲線106は、点112で交差し、これは交差距離で発生する。交差点112での交差距離未満の距離で、誘導電磁界の電界強度は、放射電磁界の電界強度より、大部分の位置で著しく大きい。交差距離より大きな距離では、その反対となる。したがって、誘導電界強度曲線及び放射電界強度曲線103及び106は、誘導電磁界と放射電磁界との間の根本的な伝搬の差異を更に示している。誘導電磁界と放射電磁界との間の差異の非公式な説明のために、Milligan,T.のModern Antenna Design(McGraw−Hill,1st Edition,1985,8〜9ページ)が参照され、この文献は、参照によりその全体が本明細書に組み込まれる。
上述した放射電磁波と誘導電磁波との間の差異は、公式に容易に表現され、厳密な基準で示されている。そのような2つの異なる解は、1つの同じ線形偏微分方程式から明らかにすることができ、この波動方程式は、問題に課された境界条件に解析的に従う。波動方程式に関するグリーン関数は、それ自体、放射波の性質と誘導波の性質との間の差異を含む。
空の空間において、波動方程式は、固有関数が複素波数平面上で固有値の連続スペクトルを保有する微分演算子である。この横電磁(transverse electro-magnetic)(TEM)界は、放射電磁界と呼ばれ、それらの伝搬電界は、「ヘルツ波」と呼ばれる。しかし、導電境界の存在において、波動方程式に境界条件を加えると、数学的に、連続スペクトルに加えて離散スペクトルの合計からなる波数のスペクトル表現となる。このために、Sommerfeld,A.の「Uber die Ausbreitung der Wellen in der Drahtlosen Telegraphie」(Annalen der Physik,Vol.28,1909,665〜736ページ)を参照する。また、「Partial Differential Equations in Physics−Lectures on Theoretical Physics:Volume VI」(Academic Press,1949,236〜289ページ,295〜296ページ)の第6章として刊行されたSommerfeld,A.の「Problems of Radio」、Collin、R.E.の「Hertzian Dipole Radiating Over a Lossy Earth or Sea:Some Early and Late 20th Century Controversies」(IEEE Antennas and Propagation Magazine,Vol.46,No.2,April 2004,64〜79ページ)、並びにReich,H.J.、Ordnung,P.F、Krauss,H.L.及びSkalnik,J.G.の「Microwave Theory and Techniques」(Van Nostrand,1953,291〜293ページ)を参照されたい。これらの参考文献のそれぞれは、その全体が参照により本明細書に組み込まれる。
「地上波」及び「表面波」という用語は、2つの明確に異なる物理的伝搬現象を識別する。表面波は、別個の極から解析的に発生して、平面波スペクトルにおける離散成分を生じる。例えば、Cullen,A.L.による「The Excitation of Plane Surface Waves」(Proceedings of the IEE(British),Vol.101,Part IV,August 1954,225〜235ページ)を参照されたい。この文脈では、表面波は、誘導表面波であると考えられる。表面波(Zenneck−Sommerfeld誘導波の意味における)は、無線放送から現在とてもよく知られている地上波(Weyl−Norton−FCCの意味における)と物理的かつ数学的に同じではない。これら2つの伝搬機構は、複素平面上の異なる種類の固有値スペクトル(連続又は離散)の励起から発生する。球状に伝搬し、固有値の連続性を保有し、図1の曲線106により示すように幾何級数的に低下して、分岐線法積分の結果から得られる古典的な地上波のヘルツ放射とは反対に、誘導表面波の電界強度は、図1の曲線103により示すように距離と共に指数関数的に減衰し(損失性の導波路内の伝搬に酷似する)、放射伝送線内の伝搬に似ている。「The Surface Wave in Radio Propagation over Plane Earth」(Proceedings of the IRE,Vol.25,No.2,February,1937,219〜229ページ)及び「The Surface Wave in Radio Transmission」(Bell Laboratories Record,Vol.15,June 1937,321〜324ページ)においてC.R.Burrowsによって実験的に実証されたように、垂直アンテナは、地上波を放射するが、誘導表面波を送出しない。
上記を要約すると、第1に、分岐線法積分に対応する波数固有値スペクトルの連続部分は、放射電磁界を生成し、第2に、離散スペクトル、及び積分の輪郭線により囲まれた極から発生する対応する残りの合計は、結果として、伝搬を横断する方向に指数関数的に減衰した非TEMの進行表面波となる。そのような表面波は、誘導伝送線モードである。更なる説明のために、Friedman,B.の「Principles and Techniques of Applied Mathematics」(Wiley,1956,214,283〜286,290,298〜300ページ)を参照する。
自由空間では、アンテナは、波動方程式の連続固有値を励起し、これは放射電磁界であり、Ez及び同相のHφを有する外向きに伝搬するRFエネルギは、永久に失われる。一方で、導波路プローブは、離散固有値を励起し、これは、結果として伝送線伝搬となる。Collin,R.E.の「Field Theory of Guided Waves」(McGraw−Hill,1960,453,474〜477ページ)を参照されたい。そのような理論的解析が、損失性均質媒体の平面又は球面にわたる開表面誘導波を送出する仮定的な可能性を提供してきたが、一世紀を越える間、なんらかの実用的効率を有してこれを実現する工学技術における既知の構造は、存在していない。残念なことに、1900年代初頭に出現したために、上述した理論的解析は、基本的に理論に留まり、損失性均質媒体の平面又は球面にわたる開表面誘導波の送出を実用的に実現する既知の構造は存在していない。
本開示の各種実施形態によれば、損失性導電媒体の表面に沿って誘導表面導波モードに結合する電界を励起するように構成された、様々な誘導表面導波プローブが説明される。そのような誘導電磁界は、損失性導電媒体の表面上の誘導表面波モードに、大きさ及び位相において実質的にモード整合している。そのような誘導表面波モードはまた、Zenneck導波モードと呼ぶことができる。本明細書で説明する誘導表面導波プローブによって励起された結果として生じる電界が、損失性導電媒体の表面上の誘導表面導波モードに実質的にモード整合しているという事実によって、誘導表面波の形態での誘導電磁界が、損失性導電媒体の表面に沿って送出される。一実施形態によれば、損失性導電媒体は、地球などのテレストリアル媒体を含む。
図2を参照して、1907年にJonathan Zenneckによって、彼の論文、Zenneck,J.の「On the Propagation of Plane Electromagnetic Waves Along a Flat Conducting Surface and their Relation to Wireless Telegraphy」(Annalen der Physik,Serial 4,Vol.23,September 20,1907,846〜866ページ)に記載されたように導出されたマクスウェル方程式に対する境界値解の検討のために提供する伝搬境界面を示す。図2は、領域1として示された損失性導電媒体と領域2として示された絶縁体との間の境界面に沿って放射状に伝搬する波動に対する円筒座標を示す。領域1は、例えば、任意の損失性導電媒体を含むことができる。一例では、そのような損失性導電媒体は、地球又は他の媒体などのテレストリアル媒体を含むことができる。領域2は、領域1と境界界面を共有する第2の媒体であり、領域1に対して異なる構造パラメータを有する。領域2は、例えば、大気又は他の媒体などの任意の絶縁体を含むことができる。そのような境界界面に対する反射係数は、複素ブルースター角での入射に対してのみゼロとなる。Stratton,J.A.の「Electromagnetic Theory」(McGraw−Hill,1941,516ページ)を参照されたい。
各種実施形態によれば、本開示は、領域1を含む損失性導電媒体の表面上の誘導表面導波モードに実質的にモード整合した電磁界を生成する、様々な誘導表面導波プローブを説明する。各種実施形態によれば、そのような電磁界は、結果としてゼロ反射とすることができる損失性導電媒体の複素ブルースター角で入射する波面を実質的に合成する。
更に説明するために、ejωtの電界変化が仮定され、かつρ≠0及びz≧0(式中、zは領域1の表面に垂直な垂直座標であり、ρは円筒座標における半径寸法である)である領域2において、境界面に沿った境界条件を満たすZenneckのマクスウェル方程式の閉形式厳密解は、以下の電界及び磁界成分によって表現される。
ejωtの電界変化が仮定され、かつρ≠0及びz≦0である領域1において、境界面に沿った境界条件を満たすZenneckのマクスウェル方程式の閉形式厳密解は、以下の電界及び磁界成分によって表現される。
これらの表現において、zは、領域1の表面に垂直な垂直座標であり、ρは、半径座標であり、
は、第2種及びn次の複素引数ハンケル関数であり、u1は、領域1の正の垂直(z)方向の伝搬定数であり、u2は、領域2の垂直(z)方向の伝搬定数であり、σ1は、領域1の導電率であり、ωは、2πf(式中、fは励起の周波数である)に等しく、εoは、自由空間の誘電率であり、ε1は、領域1の誘電率であり、Aは、発生源によって課される発生源定数であり、γは、表面波の放射伝搬定数である。
±z方向の伝搬定数は、領域1と領域2との間の境界面の上及び下に波動方程式を分離して、境界条件を課すことにより決定される。これを実行することにより、領域2では、以下の式が得られ、
領域1では、以下の式が得られる。
放射伝搬定数γは、以下の式により得られ、
これは、複素表現であり、式中、nは、複素屈折率であり、以下の式により得られる。
上記の式のすべてにおいて、
であり、式中、εrは、領域1の比誘電率を含み、σ1は、領域1の導電率であり、εoは、自由空間の誘電率であり、μoは、自由空間の透磁率を含む。したがって、生成された表面波は、境界面に平行に伝搬し、境界面に垂直に指数関数的に減衰する。これは、消散として既知である。
したがって、式(1)〜(3)は、円筒状に対称な放射状に伝搬する導波モードであると考えることができる。Barlow,H.M.及びBrown,J.の「Radio Surface Waves」(Oxford University Press,1962,10〜12ページ,29〜33ページ)を参照されたい。本開示は、この「開境界」導波モードを励起する構造を詳述する。具体的には、各種実施形態によれば、誘導表面導波プローブは、電圧及び/又は電流が供給され、領域2と領域1との間の境界界面に対して配置された、適切なサイズの帯電端子を備える。これは、図3を参照することにより、より良好に理解することができる。図3は、損失性導電媒体203によって提示された平面に垂直な垂直軸zに沿って損失性導電媒体203(例えば、地球)の上に持ち上げられた帯電端子T1を含む、誘導表面導波プローブ200aの例を示す。損失性導電媒体203は、領域1を構成し、第2の媒体206は、領域2を構成して、損失性導電媒体203と境界界面を共有する。
一実施形態によれば、損失性導電媒体203は、地球などのテレストリアル媒体を含むことができる。このために、そのようなテレストリアル媒体は、天然であろうと人工であろうと、すべての構造又はその上に含まれる形成物を含む。例えば、そのようなテレストリアル媒体は、岩、土、砂、淡水、海水、木、植物、及び我々の惑星を構成する他のすべての自然要素などの、自然要素を含むことができる。加えて、そのようなテレストリアル媒体は、コンクリート、アスファルト、建築材料、及び他の人工材料などの、人工要素を含むことができる。他の実施形態では、損失性導電媒体203は、天然に存在するものであろうと人工であろうと、地球以外のなんらかの媒体を含むことができる。他の実施形態では、損失性導電媒体203は、人工表面などの他の媒体、及び自動車、航空機、人工材料(合板、プラスチックシート、又は他の材料などの)又は他の媒体などの構造を含むことができる。
損失性導電媒体203がテレストリアル媒体又は地球を含む場合では、第2の媒体206は、地表の上の大気を含むことができる。そのように、大気は、空気及び地球の大気を構成する他の要素を含む「大気媒体」と呼ぶことができる。加えて、第2の媒体206が、損失性導電媒体203に対して他の媒体を含むことができることが可能である。
誘導表面導波プローブ200aは、例えば、垂直給電線導体を介して励起源212を帯電端子T1に結合する給電ネットワーク209を含む。各種実施形態によれば、任意の所与の時点で端子T1に印加される電圧に基づく電界を合成するために、電荷Q1が帯電端子T1に課される。電界(E)の入射角(θi)に依存して、電界を、領域1を含む損失性導電媒体203の表面上の誘導表面導波モードに実質的にモード整合することが可能である。
式(1)〜(6)のZenneck閉形式の解を考慮することにより、領域1と領域2との間のLeontovichインピーダンス境界条件は、以下の式のように表すことができる。
式中、
は、正の垂直(+z)方向の単位法線であり、
は、上記の式(1)により表現される領域2の磁界強度である。式(13)は、式(1)〜(3)で示される電界及び磁界が結果として境界界面に沿った放射表面電流密度となることができることを意味し、放射表面電流密度は、以下の式により示すことができる。
式中、Aは、定数である。更に、誘導表面導波プローブ200に近接すると(ρ≪λに対して)、上記の式(14)は、以下のような挙動を有することを留意されたい。
負号は、電源電流(Io)が図3に示すように上向きに垂直に流れるときに、「近接(close-in)」グラウンド電流は径方向内向きに流れることを意味する。「近接」のHφに場を整合することにより、以下の式であることを決定することができる。
式中、式(1)〜(6)及び(14)において、q1=C1V1である。したがって、式(14)の放射表面電流密度は、以下の式のように言い換えることができる。
式(1)〜(6)及び(17)によって表現される電界は、地上波の伝搬に関連付けられた放射電磁界ではなく、損失性の境界面に拘束される伝送線モードの性質を有する。Barlow,H.M.及びBrown,J.の「Radio Surface Waves」(Oxford University Press,1962,1〜5ページ)を参照されたい。
この時点では、式(1)〜(6)及び(17)に使用されるハンケル関数の性質のレビューが、波動方程式のこれらの解に対して提供される。第1種及び第2種かつn次のハンケル関数は、第1種及び第2種の標準ベッセル関数の複素の組合せとして定義されることがわかる。
これらの関数は、それぞれ、径方向内向きに
及び外向きに
伝搬する円筒状の波を表す。この定義は、e±jx=cos x±j sin xの関係に類似している。例えば、Harrington,R.F.の「Time−Harmonic Fields」(McGraw−Hill,1961,460〜463ページ)を参照されたい。
その
が外向き波であることは、Jn(x)及びNn(x)の級数定義から直接得られる、その独立変数を大きくした場合に漸近特性から認識することができる。誘導表面導波プローブから遠方では、
これは、ejωtを乗じると、
の空間的変動を有するej(ωt−kρ)の形態の外向きに伝搬する円筒状の波である。一次(n=1)解は、式(20a)から、以下の式のように決定することができる。
誘導表面導波プローブに近接すると(ρ≪λに対して)、一次かつ第2種のハンケル関数は、以下の式のようにふるまう。
これらの漸近表現は、複素量であることを留意されたい。xが実数量であるとき、式(20b)及び(21)は、
だけ位相が異なり、これは、45°又は等価的にλ/8の追加の位相前進又は「位相増加」に対応する。第2種の一次ハンケル関数の近接及び遠方の漸近線は、それらがρ=Rxの距離で等しい大きさである、ハンケル「交差」又は遷移点を有する。
したがって、ハンケル交差点を越えると、「遠方」表現は、ハンケル関数の「近接」表現に対して優位である。ハンケル交差点までの距離(又はハンケル交差距離)は、式(20b)及び(21)を−jγρに対して等しくして、Rxについて解くことにより見出すことができる。x=σ/ωεoで、遠方及び近接のハンケル関数漸近線は、周波数が低下するとハンケル交差点が外側に移動して、周波数依存であることを理解することができる。損失性導電媒体の導電率(σ)が変化すると、ハンケル関数漸近線もまた変化し得ることも留意されたい。例えば、土の導電率は、気象条件の変化と共に変化し得る。
図4を参照して、1850kHzの動作周波数でのσ=0.010mhos/mの導電率及びεr=15の比誘電率の領域1に対する式(20b)及び(21)の一次ハンケル関数の大きさのグラフの例を示す。曲線115は、式(20b)の遠方漸近線の大きさであり、曲線118は、式(21)の近接漸近線の大きさであり、ハンケル交差点121がRx=54フィートの距離で生じている。大きさは等しいが、ハンケル交差点121で、2つの漸近線の間に位相オフセットが存在する。ハンケル交差距離は、動作周波数の波長より相当小さいこともまた理解することができる。
領域2のZenneck閉形式解の式(2)及び(3)により得られる電界成分を考慮して、EzとEρの比は、漸近的に以下の式になる。
式中、nは、式(10)の複素屈折率であり、θiは、電界の入射角である。加えて、式(3)のモード整合した電界の垂直成分は、漸近的に以下の式になる。
これは、端子電圧において上げられた帯電端子の静電容量の絶縁されたコンポーネント上の自由電荷qfree=Cfree×VTに線形に比例する。
例えば、図3の持ち上げられた帯電端子T1の高さH1は、帯電端子T1上の自由電荷の量に影響を及ぼす。帯電端子T1が領域1のグラウンド平面付近にある場合、端子上の電荷Q1の大部分は、「拘束」されている。帯電端子T1が上げられるにつれて、拘束電荷は、実質的にすべての絶縁された電荷が開放される高さに帯電端子T1が到達するまで少なくなる。
帯電端子T1に対する容量上昇の増大の利点は、持ち上げられた帯電端子T1上の電荷がグラウンド平面から更に除去されて、結果として自由電荷の量qfreeの増大となり、エネルギを誘導表面導波モードに結合することである。帯電端子T1がグラウンド平面から離れて移動すると、電荷分布は、端子の表面により均一に分布するようになる。自由電荷の量は、帯電端子T1の自己容量に関係する。
例えば、球形端子の静電容量は、グラウンド平面の上の物理的高さの関数として表現することができる。完全なグラウンドの上のhの物理的高さでの球の静電容量は、以下の式により得られる。
式中、球の直径は、2aであり、M=a/2hであって、hは、球形端子の高さである。これで理解することができるように、端子高さhの増大により、帯電端子の静電容量Cは、低減する。直径の約4倍(4D=8a)以上の高さの帯電端子T1の高度に対して、電荷分布は、球形端子回りでほぼ均一であり、これは、誘導表面導波モードへの結合を向上することができることを示すことができる。
十分に絶縁された端子の場合では、導体球の自己容量は、C=4πεoaにより近似することができ、式中、aは、メートルでの球の半径である。円盤の自己容量は、C=8εoaにより近似することができ、式中、aは、メートルでの円盤の半径である。帯電端子T1は、球、円盤、円筒、円錐、トーラス、フード、1つ以上のリング、又は任意の他のランダム化形状若しくは形状の組合せなどの、任意の形状を含むことができる。帯電端子T1の位置に対して、等価球直径を決定して使用することができる。
これは、帯電端子T1が損失性導電媒体203の上にhp=H1の物理的高さに上げられた図3の例を参照して更に理解することができる。「拘束」電荷の影響を低減するために、帯電端子T1は、少なくとも帯電端子T1の球直径(又は等価な球の直径)の4倍の物理的高さに配置して、拘束された電荷の影響を低減することができる。
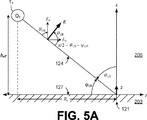
次に図5Aを参照して、図3の帯電端子T1上の上げられた電荷Q1により生成された電界の光線光学の解釈を示す。光学におけるように、入射電界の反射を最小化することにより、損失性導電媒体203の誘導表面導波モードに結合されたエネルギを向上及び/又は最大化することができる。入射面(境界界面ではない)に平行に偏波された電界(E‖)に対して、入射電界の反射の量は、フレネル反射係数を使用して決定することができる。フレネル反射係数は、以下の式のように表現することができる。
式中、θiは、面法線に対して測定した従来の入射角である。
図5Aの例では、光線光学の解釈は、面法線
に対して測定したθiの入射角を有する入射面に平行に偏波された入射電界を示す。Γ‖(θi)=0である場合、入射電界の反射は存在しないことになり、したがって、入射電界は、損失性導電媒体203の表面に沿った誘導表面導波モードに完全に結合されることになる。入射角が以下の式であるとき、式(25)の分子は、ゼロになることを理解することができる。
式中、x=σ/ωεoである。この複素入射角(θi,B)は、ブルースター角と呼ばれる。式(22)に戻って、式(22)及び(26)の両方において同じ複素ブルースター角(θi,B)の関係が存在することを理解することができる。
図5Aに示すように、電界ベクトルEは、入射面に平行に偏波された入射する不均一平面波として示すことができる。電界ベクトルEは、独立した水平及び垂直成分から、以下の式のように生成することができる。
幾何学的に、図5Aの例示は、電界ベクトルEを以下の式により得ることができることを示唆する。
場の比は以下の式であることを意味する。
「ウェーブチルト(wave tilt)」と呼ばれる一般化パラメータWは、本明細書では、以下の式により得られる、水平電界成分と垂直電界成分の比として表される。
これは、複素数であり、大きさ及び位相の両方を有する。領域2内の電磁波に対して、ウェーブチルト角(Ψ)は、領域1との境界界面での波面の法線と境界界面の接線との間の角度に等しい。これは、放射状の円筒状の誘導表面波に関する電磁波の等位相面及びそれらの法線を示す、図5Bでより容易に理解することができる。完全導体との境界界面(z=0)において、波面法線は、境界界面の接線に平行であり、結果としてW=0となる。しかし、損失性誘電体の場合では、波面法線がz=0で境界界面の接線に平行ではないため、ウェーブチルトWは存在する。
式(30b)を誘導表面波に適用することにより、以下の式が得られる。
複素ブルースター角(θi,B)に等しい入射角で、式(25)のフレネル反射係数は、以下の式により示すように、ゼロになる。
式(22)の複素数の場の比を調整することにより、入射電界を、反射が低減又は除去される複素角で入射するように合成することができる。この比を
として確立することにより、結果として複素ブルースター角で入射する合成された電界となり、反射をゼロにする。
電気的実効高の概念は、複素入射角を有する電界を誘導表面導波プローブ200と合成することに更なる洞察を提供することができる。電気的実効高(heff)は、以下の式のように定義されている。
これは、hpの物理高(又は長さ)を有するモノポールに対するものである。この表現は、構造に沿った波源分布の大きさ及び位相に依存するため、実効高(又は長さ)は、一般的に複素数である。構造の分布電流I(z)の積分は、構造の物理高(hp)にわたって実行され、構造の底部(又は入力)を介して上向きに流れるグラウンド電流(I0)に対して正規化される。構造に沿って分配された電流は、以下の式により表現することができる。
式中、β0は、構造上を伝搬する電流に対する伝搬係数である。図3の例では、ICは、誘導表面導波プローブ200aの垂直構造に沿って分配される電流である。
例えば、構造の底部の低損失コイル(例えば、ヘリカルコイル)、及びこのコイルと帯電端子T1との間に接続された垂直給電線導体を含む給電ネットワーク209を考えてみる。コイル(又はヘリカル遅延線)に起因する位相遅延は、θc=βplCであり、式中、lCは、物理的長さであり、以下の式は、伝搬係数である。
式中、Vfは、構造上の速度係数であり、λ0は、供給される周波数での波長であり、λpは、速度係数Vfから結果として生じる伝搬波長である。位相遅延は、グラウンド(杭)電流I0に対して測定される。
加えて、垂直給電線導体の長さlwに沿った空間位相遅延は、θy=βwlwにより得ることができ、式中、βwは、垂直給電線導体に対する伝搬位相定数である。いくつかの実装形態では、誘導表面導波プローブ200aの物理的高さhpと垂直給電線導体の長さlwとの間の差は、供給周波数での波長(λ0)より相当小さいため、空間位相遅延は、θy=βwhpにより近似することができる。結果として、コイル及び垂直給電線導体を介した全位相遅延は、Φ=θc+θyであり、物理的構造の底部からコイルの上部に供給される電流は、以下の式である。
式中、Φは、グラウンド(杭)電流I0に対して測定された全位相遅延である。その結果として、誘導表面導波プローブ200の電気的実効高は、以下の式により近似することができる。
この式は、物理的高さhp≪λ0である場合に対するものである。Φの角度(又は位相シフト)でのモノポールの複素実効高heff=hpは、ソース電界を誘導表面導波モードに整合させ、誘導表面波を損失性導電媒体203上に送出させるように、調整することができる。
図5Aの例では、光線光学を使用して、ハンケル交差距離(Rx)121で複素ブルースター入射角(θi,B)を有する入射電界(E)の複素角三角法を例示している。式(26)から、損失性導電媒体に対して、ブルースター角は、複素数であり、以下の式により規定されることを思い出されたい。
電気的に、幾何学的パラメータは、帯電端子T1の電気的な実効高(heff)によって、以下の式により関連付けられる。
式中、Ψi,B=(π/2)−θi,Bは、損失性導電媒体の表面から測定されたブルースター角である。誘導表面導波モードに結合するために、ハンケル交差距離での電界のウェーブチルトは、電気的な実効高とハンケル交差距離の比として表現することができる。
物理的高さ(hp)及びハンケル交差距離(Rx)の両方が実数量であるため、ハンケル交差距離(Rx)での所望の誘導表面ウェーブチルト角(Ψ)は、複素実効高(heff)の位相(Φ)に等しい。これは、コイルの供給点での位相、したがって、式(37)の位相シフトを変更することにより、複素実効高の位相Φを操作して、ハンケル交差点121での誘導表面導波モードのウェーブチルト角Ψに整合させることができる(Φ=Ψ)ことを意味する。
図5Aで、損失性導電媒体表面に沿った長さRxの隣接する辺、及び、Rxでのハンケル交差点121と帯電端子T1の中心との間に延びる光線124と、ハンケル交差点121と帯電端子T1との間の損失性導電媒体表面127との間で測定された複素ブルースター角Ψi,Bを有する、直角三角形が示されている。帯電端子T1を物理的高さhpに配置して、適切な位相遅延Φを有する電荷で励起して、結果として生じる電界は、ハンケル交差距離Rxで、かつブルースター角で、損失性導電媒体の境界界面に入射する。これらの条件下で、反射なしに又は実質的に無視できる反射で、誘導表面導波モードを励起することができる。
実効高(heff)の位相シフトΦを変更することなく帯電端子T1の物理的高さが低減される場合、結果として生じる電界は、誘導表面導波プローブ200から低減した距離においてブルースター角で損失性導電媒体203と交差する。図6は、電界がブルースター角で入射する距離についての帯電端子T1の物理的高さを低減する効果をグラフで示す。高さがh3からh2を経てh1まで低減されると、電界が損失性導電媒体(例えば、地球)とブルースター角で交差する点は、帯電端子位置に近づいて移動する。しかし、式(39)が示すように、帯電端子T1の高さH1(図3)は、ハンケル関数の遠方コンポーネントを励起するために、物理的高さ(hp)以上でなければならない。帯電端子T1を実効高(heff)以上に配置して、損失性導電媒体203を、図5Aに示すように、ハンケル交差距離(Rx)121以上でブルースター入射角(Ψi,B=(π/2)−θi,B)で照射することができる。帯電端子T1上の拘束電荷を低減又は最小化するために、上述したように、高さは、少なくとも帯電端子T1の球直径(又は等価な球体直径)の4倍でなければならない。
誘導表面導波プローブ200は、複素ブルースター角で損失性導電媒体203の表面を照射して、それによって、Rxのハンケル交差点121で(又はその向こうの)誘導表面波モードに実質的にモード整合することにより径方向の表面電流を励起する波動に対応するウェーブチルトを有する電界を確立するように構成することができる。
図7を参照して、帯電端子T1を含む誘導表面導波プローブ200bの例のグラフ表示を示す。AC源212は、例えば、ヘリカルコイルなどのコイル215を含む給電ネットワーク209(図3)を介して誘導表面導波プローブ200bに結合される帯電端子T1に対する励起源として機能する。他の実装形態では、AC源212は、一次コイルを介してコイル215に誘導結合することができる。いくつかの実施形態では、AC源212のコイル215への結合を向上及び/又は最大化するために、インピーダンス整合ネットワークを含めることができる。
図7に示すように、誘導表面導波プローブ200bは、損失性導電媒体203によって提示された平面に実質的に垂直な垂直軸zに沿って配置された上部帯電端子T1(例えば、高さhpにある球)を含むことができる。第2の媒体206は、損失性導電媒体203の上に配置されている。帯電端子T1は、自己容量CTを有する。動作中、任意の所与の時点での端子T1に印加される電圧に依存して、電荷Q1が端子T1に課される。
図7の例では、コイル215は、第1の端部で接地杭218に、かつ垂直給電線導体221を介して帯電端子T1に結合される。いくつかの実装形態では、帯電端子T1へのコイル接続は、図7に示すように、コイル215のタップ224を使用して調整することができる。コイル215は、コイル215の下側部分のタップ227を介してAC源212によって、動作周波数で励振させることができる。他の実装形態では、AC源212は、一次コイルを介してコイル215に誘導結合することができる。
誘導表面導波プローブ200の構造及び調整は、伝送周波数、損失性導電媒体の条件(例えば、土の導電率σ及び比誘電率εr)、及び帯電端子T1のサイズなどの、様々な動作条件に基づく。屈折率は、式(10)及び(11)から、以下の式のように計算することができる。
式中、x=σ/ωεoであり、ω=2πfである。導電率σ及び比誘電率εrは、損失性導電媒体203の試験測定値により決定することができる。面法線から測定される複素ブルースター角(θi,B)もまた、式(26)から、以下の式のように決定することができる。
又は、以下の式のように図5Aに示すように表面から測定される。
ハンケル交差距離(WRx)でのウェーブチルトもまた、式(40)を使用して見出すことができる。
ハンケル交差距離もまた、図4により示すように、−jγρに対する式(20b)及び(21)の大きさを等しくして、Rxについて解くことにより、見出すことができる。次に、ハンケル交差距離及び複素ブルースター角を使用して式(39)から、電気的な実効高を、以下の式のように決定することができる。
式(44)から理解することができるように、複素実効高(heff)は、帯電端子T1の物理的高さ(hp)に関連付けられた大きさ、及びハンケル交差距離(Rx)でのウェーブチルト角(Ψ)に関連付けられた位相遅延(Φ)を含む。これらの変数及び選択された帯電端子T1の構成を用いて、誘導表面導波プローブ200の構成を決定することが可能である。
物理的高さ(hp)以上に配置された帯電端子T1を用いて、給電ネットワーク209(図3)及び/又は給電ネットワークを帯電端子T1に接続する垂直給電線を調整して、帯電端子T1上の電荷Q1の位相(Φ)をウェーブチルト(W)の角度(Ψ)に整合することができる。帯電端子T1のサイズは、端子に課される電荷Q1のための十分大きな表面を提供するように選択することができる。一般的に、帯電端子T1を実用的な限り大きくすることが望ましい。帯電端子T1のサイズは、結果として帯電端子周囲の放電又はスパークとなり得る周辺の空気のイオン化を回避するために、十分大きくすべきである。
ヘリカル巻線コイルの位相遅延θcは、Corum,K.L.及びJ.F.Corumの「RF Coils,Helical Resonators and Voltage Magnification by Coherent Spatial Modes」(Microwave Review,Vol.7,No.2,September 2001,36〜45ページ)により説明されているように、マクスウェル方程式から決定することができ、この文献は、その全体が参照により本明細書に組み込まれる。H/D>1のヘリカルコイルに対して、コイルの縦軸に沿った波動の伝搬速度(υ)と光速(c)の比、又は「速度係数」は、以下の式により得られる。
式中、Hは、ソレノイドコイルの軸方向長さであり、Dは、コイル直径であり、Nは、コイルの巻数であり、s=H/Nは、コイルの巻線間隔(又はらせんピッチ)であり、λoは、自由空間の波長である。この関係に基づいて、ヘリカルコイルの電気長又は位相遅延は、以下の式により得られる。
らせんがらせん状に巻かれている、又は短くかつ太い場合、原理は同じであるが、Vf及びθcは、試験的測定により得る方がより容易である。ヘリカル伝送線の特性(波動)インピーダンスに対する表現もまた、以下の式のように導出されている。
構造の空間位相遅延θyは、垂直給電線導体221(図7)の進行波の位相遅延を使用して決定することができる。完全グラウンド平面の上の円筒形垂直導体の静電容量は、以下の式のように表現することができる。
式中、hwは、導体の垂直長さ(又は高さ)であり、aは、半径である(mks単位での)。ヘリカルコイルと同様に、垂直給電線導体の進行波の位相遅延は、以下の式により得ることができる。
式中、βwは、垂直給電線導体に対する伝搬位相定数であり、hwは、垂直給電線導体の垂直長さ(又は高さ)であり、Vwは、ワイヤ上の速度係数であり、λ0は、供給周波数での波長であり、λwは、速度係数Vwから結果として生じる伝搬波長である。均一な円筒形導体に対して、速度係数は、Vw≒0.94又は約0.93〜約0.98の範囲の定数である。支柱が均一な伝送線であると考えられる場合、その平均特性インピーダンスは、以下の式により近似することができる。
式中、均一な円筒形導体に対してVw≒0.94であり、aは、導体の半径である。単線給電線の特性インピーダンスに対するアマチュア無線文献で用いられてきた代替的表現は、以下の式により得ることができる。
式(51)は、単線フィーダに対するZwが周波数と共に変化することを意味する。位相遅延は、静電容量及び特性インピーダンスに基づいて決定することができる。
帯電端子T1を図3に示すように損失性導電媒体203の上方に配置して、給電ネットワーク209は、ハンケル交差距離でのウェーブチルト角(Ψ)に等しい複素実効高(heff)の位相シフト(Φ)、又はΦ=Ψで帯電端子T1を励起するように調整することができる。この条件が満たされるとき、帯電端子T1上のQ1を振動させる電荷によって生成される電界は、損失性導電媒体203の表面に沿って進行する誘導表面導波モードに結合される。例えば、ブルースター角(θi,B)、垂直給電線導体221(図7)に関連付けられた位相遅延(θy)、及びコイル215(図7)の構成が既知である場合、振動する電荷Q1を位相Φ=Ψで帯電端子T1に課すように、タップ224(図7)の位置を決定して調整することができる。タップ224の位置を調整して、進行表面波の誘導表面導波モードへの結合を最大化することができる。タップ224の位置を越える余分なコイル長さを除去して、容量効果を低減することができる。垂直線の高さ及び/又はヘリカルコイルの幾何学的パラメータもまた、変更することができる。
損失性導電媒体203の表面上の誘導表面導波モードへの結合は、帯電端子T1上の電荷Q1に関連付けられた複素影像平面に関する定在波の共振のために誘導表面導波プローブ200を同調させることにより、向上及び/又は最適化することができる。これを行なうことにより、帯電端子T1上の増大した及び/又は最大の電圧(したがって、電荷Q1)に対して、誘導表面導波プローブ200の特性を調整することができる。図3に戻って、領域1の損失性導電媒体203の影響は、影像法の分析を使用して確認することができる。
物理的に、完全導体平面の上方配置された持ち上げられた電荷Q1は、完全導体平面上の自由電荷を誘引し、この自由電荷は、次に、持ち上げられた電荷Q1の下の領域内に「集積する」。結果として生じる完全導体平面上の「拘束」電気の分布は、ベル型曲線に類似している。持ち上げられた電荷Q1の電位にその下の誘導された「集積」電荷の電位を加えた重ね合わせは、完全導体平面に対するゼロ等電位面を強制する。完全導体平面の上の領域内の電界を説明する境界値問題の解は、持ち上げられた電荷からの電界が完全導体平面の下の対応する「影像」電荷からの電界と重ね合わされる、影像電荷の古典的概念を使用して得ることができる。
この解析はまた、誘導表面導波プローブ200の下の実効影像電荷Q1'の存在を仮定することにより、損失性導電媒体203に対しても使用することができる。実効影像電荷Q1'は、図3に示すように、導電性影像グラウンド平面130回りに帯電端子T1上の電荷Q1と同時に発生する。しかし、影像電荷Q1'は、完全導体の場合になるように、単になんらかの実数の深さに配置され、かつ帯電端子T1上の一次ソース電荷Q1と180°位相がずれているのではない。むしろ、損失性導電媒体203(例えば、テレストリアル媒体)は、位相シフトした影像を提示する。すなわち、影像電荷Q1'は、損失性導電媒体203の表面(又は物理的境界)の下の複素深さにある。複素像深さの説明のために、Wait,J.R.の「Complex Image Theory−Revisited」(IEEE Antennas and Propagation Magazine,Vol.33,No.4,August 1991,27〜29ページ)を参照し、この文献は、その全体が参照により本明細書に組み込まれる。
電荷Q1の物理的高さ(H1)に等しい深さにある影像電荷Q1'の代わりに、導電性影像グラウンド平面130(完全導体を表す)が、z=−d/2の複素深さに配置されて、影像電荷Q1'は、−D1=−(d/2+d/2+H1)≠H1により得られる複素深さ(すなわち、「深さ」は大きさ及び位相の両方を有する)に見える。地球の上に垂直に偏波されたソースに対して、
であり、式中、
であり、式(12)に示すようである。次に、影像電荷の複素数の間隔は、境界面が誘電体又は完全導体のいずれかである場合には発生しない追加の位相シフトに、外部電界が遭遇することを意味する。損失性導電媒体では、波面法線は、領域1と領域2との間の境界界面ではなくz=−d/2の導電性影像グラウンド平面130の接線に平行である。
損失性導電媒体203が物理的境界136を有する有限導体の地球133である、図8Aに示す場合を考えてみる。有限導体の地球133は、物理的境界136の下の複素数の深さz1に配置された、図8Bに示すような完全導電性影像グラウンド平面139により置換えることができる。この等価表現は、物理的境界136で境界面を見下ろすとき、同じインピーダンスを有する。図8Bの等価表現は、図8Cに示すような等価伝送線としてモデル化することができる。等価構造の断面は、完全導電性影像平面のインピーダンスを短絡(zs=0)とした(z方向の)端部負荷伝送線として表される。深さz1は、地球を見下ろすTEM波のインピーダンスを図8Cの伝送線路を見て見た影像グラウンド平面のインピーダンスzinに等しくすることにより決定することができる。
図8Aの場合では、上部領域(空気)142内の伝搬定数及び波動の特性インピーダンスは、以下の式である。
損失性の地球133では、伝搬定数及び波動の特性インピーダンスは、以下の式である。
法線入射に対して、図8Bの等価表現は、特性インピーダンスが空気のもので(zo)、γoの伝搬定数を有し、長さがz1であるTEM伝送線と等価である。そのようにして、図8Cの短絡した伝送線に対して境界面で見た影像グラウンド平面のインピーダンスZinは、以下の式により得られる。
図8Cの等価モデルに関連付けられた影像グラウンド平面のインピーダンスZinを図8Aの法線入射波のインピーダンスに等しくして、z1について解くことにより、短絡(完全導電性影像グラウンド平面139)までの距離が、以下の式のように得られる。
式中、逆双曲線正接に対する級数展開の第一項のみがこの近似に関して考慮されている。空気領域142内では、伝搬定数は、γo=jβoであるので、Zin=jZotanβoz1(これは実数z1に対する単なる虚数である)であるが、zeは、σ≠0である場合に複素数値である。したがって、z1が複素距離である場合のみ、Zin=Zeである。
図8Bの等価表現が完全導電性影像グラウンド平面139を含むため、地球の表面(物理的境界136)にある電荷又は電流に対する影像深さは、像グラウンド平面139の反対側の距離z1、又は地球の表面(z=0に配置された)の下のd=2×z1に等しい。したがって、完全導電性影像グラウンド平面139までの距離は、以下の式により近似することができる。
加えて、「影像電荷」は、実電荷に「等しくかつ反対」であることになるので、深さz1=−d/2での完全導電性影像グラウンド平面139の電位は、ゼロであることになる。
電荷Q1が図3に示すように地球の表面の上の距離H1に持ち上げられた場合、影像電荷Q1'は、表面の下のD1=d+H1の複素距離、又は影像グラウンド平面130の下のd/2+H1の複素距離にある。図7の誘導表面導波プローブ200bは、図8Bの完全導電性影像グラウンド平面139に基づくことができる等価単線伝送線路の影像平面モデルとしてモデル化することができる。図9Aは、等価単線伝送線路の影像平面モデルの例を示し、図9Bは、図8Cの短絡した伝送線を含む古典的等価伝送線路モデルの例を示す。
図9A及び9Bの等価影像平面モデルでは、Φ=θy+θcは、地球133(又は損失性導電媒体203)を基準にした誘導表面導波プローブ200の進行波の位相遅延であり、θc=βpHは、度で表現した物理的長さHのコイル215(図7)の電気長であり、θy=βwhwは、度で表現した物理的長さhwの垂直給電線導体221(図7)の電気長であり、θd=βod/2は、影像グラウンド平面139と地球133(又は損失性導電媒体203)の物理的境界136との間の位相シフトである。図9A及び9Bの例では、Zwは、オームでの持ち上げられた垂直給電線導体221の特性インピーダンスであり、Zcは、オームでのコイル215の特性インピーダンスであり、ZOは、自由空間の特性インピーダンスである。
誘導表面導波プローブ200の底部で、構造を「見上げて」見たインピーダンスは、Z↑=Zbaseである。以下の式の負荷インピーダンスで、
(式中、CTは、帯電端子T1の自己容量である)、垂直給電線導体221(図7)を「見上げて」見たインピーダンスは、以下の式により得られる。
コイル215(図7)を「見上げて」見たインピーダンスは、以下の式により得られる。
誘導表面導波プローブ200の底部で、損失性導電媒体203を「見下して」見たインピーダンスは、Z↓=Zinであり、これは以下の式により得られる。
式中、Zs=0である。
損失を無視して、等価影像平面モデルは、物理的境界136でZ↓+Z↑=0である場合、共振に同調することができる。又は、低損失の場合では、物理的境界136でX↓+X↑=0であり、式中、Xは、対応するリアクタンス成分である。したがって、誘導表面導波プローブ200を「見上げた」物理的境界136でのインピーダンスは、損失性導電媒体203を「見下ろした」物理的境界136でのインピーダンスの共役である。プローブの電界の損失性導電媒体203(例えば、地球)の表面に沿った誘導表面導波モードへの結合を向上及び/又は最大化するΦ=Ψであるように、媒体のウェーブチルトΨの角度に等しい進行波の位相遅延Φを維持しながら、帯電端子T1の負荷インピーダンスZLを調整することにより、図9A及び9Bの等価影像平面モデルを、影像グラウンド平面139に対する共振に調整することができる。この方法で、等価複素影像平面モデルのインピーダンスは、単に抵抗性であり、これは、電圧及び端子T1上の持ち上げられた電荷を最大化するプローブ構造上の重ね合わせた定在波を維持し、式(1)〜(3)及び(16)により、伝搬する表面波を最大化する。
ハンケル解に従って、誘導表面導波プローブ200によって励起される誘導表面波は、外向きに伝搬する進行波である。誘導表面導波プローブ200(図3及び図7)の帯電端子T1と接地杭218との間の給電ネットワーク209に沿ったソース分布は、実際には、構造上の進行波に定在波を加えた重ね合わせで構成される。帯電端子T1を物理的高さhp以上に配置して、給電ネットワーク209を通って移動する進行波の位相遅延は、損失性導電媒体203に関連付けられたウェーブチルト角に整合される。このモード整合により、進行波を損失性導電媒体203に沿って送出することができる。進行波に対して位相遅延が確立されたら、帯電端子T1の負荷インピーダンスZLは、プローブ構造を−d/2の複素深さにある影像グラウンド平面(図3の130、又は図8の139)に対して定在波の共振に至らせるように調整される。この場合では、影像グラウンド平面から見たインピーダンスは、ゼロのリアクタンスを有し、帯電端子T1上の電荷は、最大化される。
進行波現象と定在波現象との間の差異は、(1)長さdの伝送線の区間(「遅延線」と呼ばれることもある)上の進行波の位相遅延(θ=βd)は、伝搬時間遅延に起因するのに対して、(2)定在波(前方及び後方に伝搬する波からなる)の位置依存性の位相は、線長さの伝搬時間遅延及び異なる特性インピーダンスの線区間の間の境界面でのインピーダンス遷移の両方に依存することである。正弦波定常状態で動作する伝送線の区間の物理的長さに起因して発生する位相遅延に加えて、Zoa/Zobの比に起因するインピーダンスの不連続点での追加の反射係数位相が存在する。式中、Zoa及びZobは、例えば、特性インピーダンスZoa=Zc(図9B)のヘリカルコイル区間の区間及び特性インピーダンスZob=Zw(図9B)の垂直給電線導体の直線区間などの、伝送線の2つの区間の特性インピーダンスである。
この現象の結果として、大いに異なる特性インピーダンスの2つの相対的に短い伝送線区間を使用して、非常に大きな位相シフトを提供することができる。例えば、低インピーダンス及び高インピーダンスの、合わせて例えば0.05λの物理的長さになる、伝送線の2つの区間からなるプローブ構造を作製して、0.25λ共振と等価である90°の位相シフトを提供することができる。これは、特性インピーダンスの大きなジャンプに起因する。この方法で、物理的に短いプローブ構造を、2つの物理的長さを組み合わせたより電気的に長くすることができる。これを、インピーダンス比の不連続点が位相の大きなジャンプを提供する図9A及び9Bに示す。区間が一体に接合されたインピーダンスの不連続点は、実質的な位相シフトを提供する。
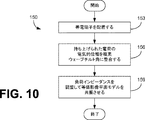
図10を参照して、損失性導電媒体203(図3)の表面に沿って誘導表面進行波を送出する、誘導表面導波プローブ200(図3及び図7)を損失性導電媒体の表面上の誘導表面導波モードに実質的にモード整合するように調整する例を示す流れ図150を示す。153で開始して、誘導表面導波プローブ200の帯電端子T1は、損失性導電媒体203の上の定義された高さに配置される。損失性導電媒体203の特性及び誘導表面導波プローブ200の動作周波数を利用して、ハンケル交差距離はまた、図4により示すように−jγρに対する式(20b)及び(21)の大きさを等しくして、Rxについて解くことにより見出すことができる。複素屈折率(n)は、式(41)を使用して決定することができ、次に、複素ブルースター角(θi,B)は、式(42)から決定することができる。次に、帯電端子T1の物理的高さ(hp)は、式(44)から決定することができる。帯電端子T1は、ハンケル関数の遠方成分を励起するために、物理的高さ(hp)以上でなければならない。この高さの関係は、表面波を送出するときに最初に考慮される。帯電端子T1上の拘束電荷を低減又は最小化するために、高さは、少なくとも帯電端子T1の球直径(又は等価な球体直径)の4倍でなければならない。
156で、帯電端子T1上の持ち上げられた電荷Q1の電気的位相遅延Φは、複素ウェーブチルト角Ψに整合される。ヘリカルコイルの位相遅延(θc)及び/又は垂直給電線導体の位相遅延(θy)は、Φをウェーブチルト(W)の角度(Ψ)に等しくするように調整することができる。式(31)に基づいて、ウェーブチルト角(Ψ)は、以下の式から決定することができる。
次に、電気的位相Φは、ウェーブチルト角に整合することができる。この角度(又は位相)の関係は、表面波を送出するときに次に考慮される。例えば、電気的位相遅延Φ=θc+θyは、コイル215(図7)の幾何学的パラメータ及び/又は垂直給電線導体221(図7)の長さ(又は高さ)を変更することにより調整することができる。Φ=Ψに整合することにより、境界界面で複素ブルースター角を有するハンケル交差距離(Rx)以上で電界を確立して、表面導波モードを励起して損失性導電媒体203に沿って進行波を送出することができる。
次に159で、帯電端子T1の負荷インピーダンスは、誘導表面導波プローブ200の等価影像平面モデルを共振させるように調整される。図9A及び9Bの導電性影像グラウンド平面139(又は図3の130)の深さ(d/2)は、式(52)、(53)及び(54)、並びに測定することができる損失性導電媒体203(例えば、地球)の値を使用して決定することができる。その深さを使用して、像グラウンド平面139と損失性導電媒体203の物理的境界136との間の位相シフト(θd)は、θd=βod/2を使用して決定することができる。次に、損失性導電媒体203を「見下ろして」見たようなインピーダンス(Zin)は、式(65)を使用して決定することができる。この共振関係は、送出される表面波を最大化すると考えることができる。
コイル215の調整されたパラメータ及び垂直給電線導体221の長さに基づいて、速度係数、位相遅延、並びにコイル215及び垂直給電線導体221のインピーダンスは、式(45)〜(51)を使用して決定することができる。加えて、帯電端子T1の自己容量(CT)は、例えば、式(24)を使用して決定することができる。コイル215の伝搬係数(βp)は、式(35)を使用して決定することができ、垂直給電線導体221に対する伝搬位相定数(βw)は、式(49)を使用して決定することができる。自己容量並びにコイル215及び垂直給電線導体221の決定された値を使用して、コイル215を「見上げて」見たような誘導表面導波プローブ200のインピーダンス(Zbase)は、式(62)、(63)及び(64)を使用して決定することができる。
誘導表面導波プローブ200の等価影像平面モデルは、Zbaseのリアクタンス成分XbaseがZinのリアクタンス成分Xinを相殺するように、又はXbase+Xin=0であるように、負荷インピーダンスZLを調整することにより、共振するよう整調することができる。したがって、誘導表面導波プローブ200を「見上げた」物理的境界136でのインピーダンスは、損失性導電媒体203を「見下ろした」物理的境界136でのインピーダンスの共役である。負荷インピーダンスZLは、帯電端子T1の電気的位相遅延Φ=θc+θyを変更することなく帯電端子T1の静電容量(CT)を変更することにより、調整することができる。反復的手法を採用して、導電性影像グラウンド平面139(又は130)に対する等価影像平面モデルの共振のために負荷インピーダンスZLを整調することができる。この方法で、損失性導電媒体203(例えば、地球)の表面に沿った誘導表面導波モードへの電界の結合を、向上及び/又は最大化することができる。
これは、数値例を有する状況を例示することにより、より良好に理解することができる。1.85MHzの動作周波数(fo)でヘリカルコイル及び垂直給電線導体を介して励起される帯電端子T1を上部に有する、物理的高さhpの上部装荷垂直スタブを含む誘導表面導波プローブ200を考えてみる。16フィートの高さ(H1)、並びにεr=15の比誘電率及びσ1=0.010mhos/mの導電率を有する損失性導電媒体203(例えば、地球)を用いて、いくつかの表面波伝搬パラメータを、fo=1.850MHzに対して計算することができる。これらの条件下で、ハンケル交差距離は、hp=5.5フィートの物理的高さでRx=54.5フィートであることを見出すことができ、これは、帯電端子T1の実際の高さより相当低い。H1=5.5フィートの帯電端子高さを使用することができたが、より高いプローブ構造は、拘束静電容量を低減して、帯電端子T1上のより大きな割合の自由電荷を可能にし、より大きな電界強度及び進行波の励起を提供した。
波長は、以下の式のように決定することができる。
式中、cは光速である。複素屈折率は、以下の式である。
これは式(41)から得られ、式中、x=σ1/ωεoであり、ω=2πfoである。複素ブルースター角は、以下の式である。
これは式(42)から得られる。式(66)を使用して、ウェーブチルトの値は、以下の式として決定することができる。
したがって、ヘリカルコイルは、Φ=Ψ=40.614°に整合するように調整することができる。
垂直給電線導体(0.27インチの直径を有する均一な円筒状の導体として近似される)の速度係数は、Vw≒0.93として得ることができる。hp≪λoであるため、垂直給電線導体に対する伝搬位相定数は、以下の式のように近似することができる。
式(49)から、垂直給電線導体の位相遅延は、以下の式である。
θc=28.974°=40.614°−11.640°であるようにヘリカルコイルの位相遅延を調整することにより、Φは、Ψに等しいことになり、誘導表面導波モードに整合する。ΦとΨとの間の関係を示すために、図11は、周波数の範囲にわたる両方のグラフを示す。Φ及びΨの両方が周波数依存であるため、それらの対応する曲線が約1.85MHzで互いに交差することがわかる。
0.0881インチの導体直径、30インチのコイル直径(D)、及び4インチの巻きの間の間隔(s)を有するヘリカルコイルに対して、コイルに対する速度係数は、式(45)を使用して、以下の式のように決定することができる。
式(35)からの伝搬係数は、以下の式である。
θc=28.974°で、ソレノイドコイルの軸方向長さ(H)は、式(46)を使用して、以下の式のように決定することができる。
この高さは、垂直給電線導体が接続されるヘリカルコイル上の位置を決定し、結果として、8.818巻(N=H/s)のコイルとなる。
ウェーブチルト角(Φ=θc+θy=Ψ)に整合するように調整されたコイル及び垂直給電線導体の進行波の位相遅延で、帯電端子T1の負荷インピーダンス(ZL)は、誘導表面波プローブ200の等価影像平面モデルの定在波共振のために調整することができる。測定された地球の誘電率、導電率、及び透磁率から、放射伝搬定数は、式(57)を使用して決定することができる。
導電性影像グラウンド平面の複素深さは、式(52)から、以下の式のように近似することができる。
導電性影像グラウンド平面と地球の物理的境界との間の対応する位相シフトは、以下の式により得られる。
式(65)を使用して、損失性導電媒体203(すなわち、地球)を「見下ろして」見たインピーダンスは、以下の式のように決定することができる。
損失性導電媒体203を「見下ろして」見たリアクタンス成分(Xin)を誘導表面波プローブ200を「見上げて」見たリアクタンス成分(Xbase)と整合することにより、誘導表面導波モードへの結合を最大化することができる。これは、コイル及び垂直給電線導体の進行波の位相遅延を変更することなく帯電端子T1の静電容量を調整することにより、実現することができる。例えば、帯電端子の静電容量(CT)を61.8126pFに調整することにより、式(62)からの負荷インピーダンスは、以下の式となる。
そして境界でのリアクタンス成分は整合される。
式(51)を使用して、垂直給電線導体(0.27インチの直径(2a)を有する)のインピーダンスは、以下の式のように得られる。
垂直給電線導体を「見上げて」見たインピーダンスは、式(63)により、以下の式のように得られる。
式(47)を使用して、ヘリカルコイルの特性インピーダンスは、以下の式のように得られる。
コイルを「見上げて」見たインピーダンスは、式(64)により、以下の式のように得られる。
式(79)の解と比較すると、リアクタンス成分が反対かつおおよそ等しく、したがって、互いの共役であることを理解することができる。したがって、完全導電性影像グラウンド平面から図9A及び9Bの等価影像平面モデルを「見上げて」見たインピーダンス(Zip)は、抵抗のみ、又はZip=R+j0である。
誘導表面導波プローブ200(図3)によって生成される電界が、給電ネットワークの進行波の位相遅延をウェーブチルト角に整合することにより確立され、かつプローブ構造が複素深さz=−d/2の完全導電性影像グラウンド平面に対して共振されるとき、電界は、損失性導電媒体上の表面上の誘導表面導波モードに実質的にモード整合され、誘導表面進行波が損失性導電媒体の表面に沿って送出される。図1に示すように、誘導電磁界の誘導電界強度曲線103は、
の特徴的な指数関数的減衰を有し、両対数目盛上で独特の屈曲部109を呈する。
要約すれば、解析的に及び実験的にの両方で、誘導表面導波プローブ200の構造上の進行波成分は、表面進行波のウェーブチルト角(Ψ)に整合する(Φ=Ψ)、その上部端子での位相遅延(Φ)を有する。この条件下で、表面導波路は、「モード整合」していると考えることができる。更に、誘導表面導波プローブ200の構造上の共振定在波成分は、帯電端子T1でVMAXを有し、損失性導電媒体203の物理的境界136(図8B)での接続部ではなく、z=−d/2の複素深さでZip=Rip+j0である下の影像平面139(図8B)でVMINを有する。最後に、帯電端子T1は、複素ブルースター角で損失性導電媒体203に入射する電磁波が
の項が優位である距離(≧Rx)で入射するように、図3の十分な高さH1(h≧RxtanΨi,B)である。無線伝送及び/又は電力供給系に役立つように、1つ以上の誘導表面導波プローブと共に、受信回路を用いることができる。
図3に戻って、誘導表面導波プローブ200の動作は、誘導表面導波プローブ200に関連付けられた動作条件の変化に対して調整するように制御することができる。例えば、適応プローブ制御システム230を使用して、誘導表面導波プローブ200の動作を制御するように、給電ネットワーク209及び/又は帯電端子T1を制御することができる。動作条件としては、損失性導電媒体203の特性(例えば、導電率σ及び比誘電率εr)の変化、電界強度の変化、及び/又は誘導表面導波プローブ200の負荷の変化を挙げることができるが、これらに限定されない。式(31)、(41)及び(42)から理解することができるように、屈折率(n)、複素ブルースター角(θi,B)、及びウェーブチルト(|W|ejΨ)は、例えば、気象条件から結果として生じる土の導電率及び誘電率の変化により影響を受けることがある。
例えば、導電率測定プローブ、誘電率センサ、グラウンド・パラメータ計、電界計、電流モニタ、及び/又は負荷受信器などの装置を使用して、動作条件の変化をモニタして、適応プローブ制御システム230に現在の動作条件に関する情報を提供することができる。次に、プローブ制御システム230は、誘導表面導波プローブ200に1つ以上の調整を行なって、誘導表面導波プローブ200に対する指定された動作条件を維持することができる。例えば、湿度及び温度が変化すると、土の導電率もまた、変化することになる。導電率測定プローブ及び/又は誘電率センサは、誘導表面導波プローブ200の周囲の複数の位置に配置することができる。一般的に、動作周波数に対するハンケル交差距離Rx又はその付近の導電率及び/又は誘電率をモニタすることが望ましいであろう。導電率測定プローブ及び/又は誘電率センサは、誘導表面導波プローブ200の周囲の複数の位置(例えば、それぞれの象限内の)に配置することができる。
導電率測定プローブ及び/又は誘電率センサは、周期的に導電率及び/又は誘電率を評価して、その情報をプローブ制御システム230に通信するように構成することができる。この情報は、LAN、WLAN、セルラーネットワーク、又は他の適切な有線又は無線通信ネットワークなどだがこれらに限定されない、ネットワークを介してプローブ制御システム230に通信することができる。モニタした導電率及び/又は誘電率に基づいて、プローブ制御システム230は、屈折率(n)、複素ブルースター角(θi,B)、及び/又はウェーブチルト(|W|ejΨ)の変化を評価し、誘導表面導波路プローブ200を調整して、ウェーブチルト角(Ψ)に等しい給電ネットワーク209の位相遅延(Φ)を維持する、かつ/又は誘導表面導波プローブ200の等価影像平面モデルの共振を維持することができる。これは、例えば、θy、θc、及び/又はCTを調整することにより、実現することができる。例えば、プローブ制御システム230は、帯電端子T1の自己容量、及び/又は帯電端子T1に適用される位相遅延(θy、θc)を調整して、誘導表面波の電気的送出効率をその最大又は最大付近に維持することができる。例えば、帯電端子T1の自己容量は、端子のサイズを変更することにより、変更することができる。電荷分布もまた、帯電端子T1のサイズを増大させることにより向上することができ、これにより、帯電端子T1からの放電の可能性を低減することができる。他の実施形態では、帯電端子T1は、負荷インピーダンスZLを変更するように調整することができる、可変インダクタンスを含むことができる。帯電端子T1に適用される位相は、送出効率を最大化するように、コイル215(図7)上のタップ位置を変更することにより、及び/又はコイル215に沿った複数の既定のタップを含めて異なる既定のタップ位置の間で切換えることにより、調整することができる。
電界計又は電界強度(field strength)(FS)計もまた、誘導表面導波プローブ200回りに分布させて、誘導表面波に関連付けられた電界の電界強度を測定することができる。電界計又はFS計は、電界強度及び/又は電界強度(例えば、電界の強度)の変化を検出して、その情報をプローブ制御システム230に通信するように構成することができる。この情報は、LAN、WLAN、セルラーネットワーク、又は他の適切な通信ネットワークなどだがこれらに限定されない、ネットワークを介してプローブ制御システム230に通信することができる。動作中に負荷及び/又は環境条件が変化する又は異なると、誘導表面導波プローブ200を調整して、FS計の位置での指定された電界強度(単数又は複数)を維持し、供給している受信器及び負荷への適切な送電を確実にすることができる。
例えば、帯電端子T1に適用される位相遅延(Φ=θy+θc)を調整して、ウェーブチルト角(Ψ)に整合することができる。1つ又は両方の位相遅延を調整することにより、誘導表面導波プローブ200を調整して、ウェーブチルトが複素ブルースター角に対応することを確実にすることができる。これは、コイル215(図7)のタップ位置を調整して、帯電端子T1に適用される位相遅延を変更することにより、実現することができる。帯電端子T1に供給される電圧レベルもまた、電界強度を調整するために増大又は減少させることができる。これは、励起源212の出力電圧を調整することにより、又は給電ネットワーク209を調整若しくは再構成することにより、実現することができる。例えば、AC源212に対するタップ227(図7)の位置を調整して、帯電端子T1から見た電圧を増大させることができる。電界強度レベルを既定の範囲内に維持することにより、受信器による結合を向上し、グラウンド電流損失を低減して、他の誘導表面導波プローブ200からの伝送との干渉を回避することができる。
プローブ制御システム230は、ハードウェア、ファームウェア、ハードウェアによって実行されるソフトウェア、又はそれらの組合せで実装することができる。例えば、プローブ制御システム230は、当業者によって理解され得るように、共に例えば付随する制御/アドレスバスを有するデータバスなどのローカルインターフェースに結合することができるプロセッサ及びメモリを含む、処理回路を含むことができる。プローブ制御のアプリケーションは、モニタされた条件に基づいて誘導表面導波プローブ200の動作を調整するように、プロセッサによって実行することができる。プローブ制御システム230はまた、様々なモニタ装置と通信するための1つ以上のネットワークインターフェースを含むことができる。通信は、LAN、WLAN、セルラーネットワーク、又は他の適切な通信ネットワークなどだがこれらに限定されない、ネットワークを介することができる。プローブ制御システム230は、例えば、サーバ、デスクトップコンピュータ、ラップトップ、又は同様な能力を有する他のシステムなどのコンピュータシステムを備えることができる。
図5Aの例に戻って、ハンケル交差距離(Rx)で複素ブルースター角(θi,B)を有する帯電端子T1の入射電界(E)の光線光学の解釈に関する複素角三角法を示す。損失性導電媒体に対して、ブルースター角は、複素数であり、式(38)により規定されることを思い出されたい。電気的に、幾何学的パラメータは、式(39)により、帯電端子T1の電気的実効高(heff)によって関連付けられる。物理的高さ(hp)及びハンケル交差距離(Rx)の両方が実量であるため、ハンケル交差距離での所望の誘導表面ウェーブチルト角(WRx)は、複素実効高(heff)の位相(Φ)に等しい。帯電端子T1を物理的高さhpに配置して、適切な位相Φを有する電荷で励起して、結果として生じる電界は、ハンケル交差距離Rxで、かつブルースター角で、損失性導電媒体の境界界面に入射する。これらの条件下で、反射なしに又は実質的に無視できる反射で、誘導表面導波モードを励起することができる。
しかし、式(39)は、誘導表面導波プローブ200の物理的高さが相対的に低くてよいことを意味する。これが誘導表面導波モードを励起することになるが、これは、結果としてほとんど自由電荷を有さないで過度に大きな拘束電荷となる。補償するために、帯電端子T1を適切な高度に上げて、自由電荷の量を増大することができる。1つの例示的な経験則として、帯電端子T1は、帯電端子T1の実効直径の約4〜5倍(又はそれより大きい)の高度に配置することができる。図6は、図5Aに示す物理的高さ(hp)の上に帯電端子T1を上げることの効果を示す。増大した高度は、ウェーブチルトが損失性導電媒体に入射する距離をハンケル交差点121(図5A)を越えて移動させる。誘導表面導波モードでの結合を向上し、したがって、誘導表面波のより大きな送出効率を提供するために、より小さな補償端子T2を使用して、ハンケル交差距離でのウェーブチルトがブルースター角にあるように、帯電端子T1の全実効高(hTE)を調整することができる。
図12を参照して、損失性導電媒体203により提示された平面に垂直な垂直軸zに沿って配置された、持ち上げられた帯電端子T1及びより低い補償端子T2を含む、誘導表面導波プローブ200cの例を示す。これに関して、帯電端子T1は、補償端子T2の真上に配置されているが、2つ以上の帯電端子及び/又は補償端子TNのなんらかの他の配置を使用することができることが可能である。本開示の実施形態によれば、誘導表面導波プローブ200cは、損失性導電媒体203の上に配置されている。損失性導電媒体203は、領域1を構成し、領域2を構成する第2の媒体206は、損失性導電媒体203と境界界面を共有する。
誘導表面導波プローブ200cは、励起源212を帯電端子T1及び補償端子T2に結合する給電ネットワーク209を含む。各種実施形態によれば、電荷Q1及びQ2を、任意の所与の時点に端子T1及びT2に印加される電圧に依存して、対応する帯電端子及び補償端子T1及びT2に課すことができる。I1は、端子リードを介して帯電端子T1上の電荷Q1を供給する誘導電流であり、I2は、端子リードを介して補償端子T2上の電荷Q2を供給する誘導電流である。
図12の実施形態によれば、帯電端子T1は、物理的高さH1で損失性導電媒体203の上に配置され、補償端子T2は、物理的高さH2で垂直軸zに沿ってT1の真下に配置され、H2は、H1未満である。伝送構造の高さhは、h=H1−H2として計算することができる。帯電端子T1は、絶縁(又は自己)静電容量C1を有し、補償端子T2は、絶縁(又は自己)静電容量C2を有する。相互静電容量CMもまた、端子T1とT2との間に、その間の距離に依存して存在し得る。動作中、電荷Q1及びQ2が、任意の所与の時点に帯電端子T1及び補償端子T2に印加される電圧に依存して、それぞれ帯電端子T1及び補償端子T2上に課される。
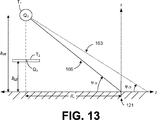
次に図13を参照して、図12の帯電端子T1上の持ち上げられた電荷Q1及び補償端子T2により生成される効果の光線光学の解釈を示す。線163により示すように光線がハンケル交差点121より大きな距離でブルースター角で損失性導電媒体と交差する高さに持ち上げた帯電端子T1と共に、補償端子T2を使用して、増大した高さを補償することにより、hTEを調整することができる。補償端子T2の効果は、線166により示すようにハンケル交差距離でのウェーブチルトがブルースター角にあるように、誘導表面導波プローブの電気的実効高を低減する(又は損失性媒体の境界面を効果的に上げる)ことである。
全実効高は、帯電端子T1に関連付けられた上側実効高(hUE)及び補償端子T2に関連付けられた下側実効高(hLE)の重ね合わせとして、以下の式のように書くことができる。
式中、ΦUは、上側帯電端子T1に適用される位相遅延であり、ΦLは、下側補償端子T2に適用される位相遅延であり、β=2π/λpは、式(35)からの伝搬係数であり、hpは、帯電端子T1の物理的高さであり、hdは、補償端子T2の物理的高さである。追加のリード長さを考慮する場合、それらは、帯電端子リード長さzを帯電端子T1の物理的高さhpに、及び補償端子リード長さyを補償端子T2の物理的高さhdに加えることにより、以下の式に示すように考慮することができる。
より低い実効高を使用して、全実効高(hTE)を調整し、図5Aの複素実効高(heff)に等しくすることができる。
式(85)又は(86)を使用して、ハンケル交差距離での所望のウェーブチルトを得るために、補償端子T2の下側円盤の物理的高さ、及び端子に給電する位相角度を決定することができる。例えば、式(86)は、補償端子高さ(hd)の関数としての帯電端子T1に適用される位相シフトとして書き換えることができ、以下の式が得られる。
補償端子T2の位置を決定するために、上述した関係を利用することができる。最初に、全実効高(hTE)は、式(86)で表現されるように、上側帯電端子T1の複素実効高(hUE)及び下側補償端子T2の複素実効高(hLE)の重ね合わせである。次に、入射角の正接は、幾何学的に以下の式のように表現することができる。
これは、ウェーブチルトWの定義に等しい。最後に、所望のハンケル交差距離Rxであるとして、hTEを調整して、入射光線のウェーブチルトをハンケル交差点121で複素ブルースター角に整合させることができる。これは、hp、ΦU、及び/又はhdを調整することにより、実現することができる。
これらの概念は、誘導表面導波プローブの例の文脈で説明すると、より良好に理解することができる。図14を参照して、損失性導電媒体203によって提示された平面に実質的に垂直な垂直軸zに沿って配置された、上側帯電端子T1(例えば、高さhTの球)及び下側補償端子T2(例えば、高さhdの円盤)を含む誘導表面導波プローブ200dの例のグラフ表示を示す。動作中、電荷Q1及びQ2が、任意の所与の時点に端子T1及びT2に印加される電圧に依存して、それぞれ帯電端子T1及び補償端子T2上に課される。
AC源212は、例えば、ヘリカルコイルなどのコイル215を含む給電ネットワーク209を介して誘導表面導波プローブ200dに結合される帯電端子T1に対する励起源として機能する。AC源212は、図14に示すようにタップ227を介してコイル215の下側部分にわたって接続することができる、又は一次コイルを経由してコイル215に誘導結合することができる。コイル215は、第1の端部で接地杭218に、及び第2の端部で帯電端子T1に結合することができる。いくつかの実装形態では、帯電端子T1への接続は、コイル215の第2の端部でタップ224を使用して調整することができる。補償端子T2は、損失性導電媒体203(例えば、グラウンド又は地球)の上に、かつそれに実質的に平行に配置され、コイル215に結合されたタップ233を介して励振される。コイル215と接地杭218との間に配置された電流計236を使用して、誘導表面導波プローブの底部での電流フローの大きさ(I0)の表示を提供することができる。あるいは、電流クランプを接地杭218に結合された導体の周囲に使用して、電流フローの大きさ(I0)の表示を得ることができる。
図14の例では、コイル215は、第1の端部で接地杭218に、かつ垂直給電線導体221を介して第2の端部で帯電端子T1に結合される。いくつかの実装形態では、帯電端子T1への接続は、図14に示すように、コイル215の第2の端部でタップ224を使用して調整することができる。コイル215は、コイル215の下側部分のタップ227を介してAC源212によって、動作周波数で励振することができる。他の実装形態では、AC源212は、一次コイルを介してコイル215に誘導結合することができる。補償端子T2は、コイル215に結合されたタップ233を介して励振される。コイル215と接地杭218との間に配置された電流計236を使用して、誘導表面導波プローブ200dの底部での電流フローの大きさの表示を提供することができる。あるいは、電流クランプを接地杭218に結合された導体の周囲に使用して、電流フローの大きさの表示を得ることができる。補償端子T2は、損失性導電媒体203(例えば、グラウンド)の上方に、かつそれに実質的に平行に配置される。
図14の例では、帯電端子T1への接続は、補償端子T2用のタップ233の接続点の上のコイル215上に配置された。そのような調整により、増大した電圧(したがってより高い電荷Q1)を上側帯電端子T1に印加することができる。他の実施形態では、帯電端子T1及び補償端子T2用の接続点は、反転することができる。誘導表面導波プローブ200dの全実効高(hTE)を調整して、ハンケル交差距離Rxで誘導表面ウェーブチルトを有する電界を励起することが可能である。ハンケル交差距離もまた、図4により示すように、−jγρに対する式(20b)及び(21)の大きさを等しくして、Rxについて解くことにより、見出すことができる。屈折率(n)、複素ブルースター角(θi,B及びΨi,B)、ウェーブチルト(|W|ejΨ)、及び複素実効高(heff=hpejΦ)は、式(41)〜(44)に関して上述したように決定することができる。
選択された帯電端子T1の構成を用いて、球体直径(又は実効球体直径)を決定することができる。例えば、帯電端子T1が球として構成されない場合、端子構成は、実効球体直径を有する球体のキャパシタンスとしてモデル化することができる。帯電端子T1のサイズは、端子に課される電荷Q1のための十分大きな表面を提供するように選択することができる。一般的に、帯電端子T1を実用的な限り大きくすることが望ましい。帯電端子T1のサイズは、結果として帯電端子周囲の放電又はスパークとなり得る周囲空気のイオン化を回避するために、十分大きくすべきである。帯電端子T1上の拘束電荷の量を低減するために、誘導表面波を送出するために帯電端子T1上に自由電荷を提供するための所望の高度は、少なくとも損失性導電媒体(例えば、地球)の上の実効球直径の4〜5倍でなければならない。補償端子T2を使用して、誘導表面導波プローブ200dの全実効高(hTE)を調整し、Rxで誘導表面ウェーブチルトを有する電界を励起することができる。補償端子T2は、hd=hT−hpで帯電端子T1の下に配置することができ、式中、hTは、帯電端子T1の全物理的高さである。補償端子T2の位置を固定し、かつ位相遅延ΦUを上側帯電端子T1に適用して、下側補償端子T2に適用される位相遅延ΦLは、式(86)の関係を使用して、以下の式のように決定することができる。
代替の実施形態では、補償端子T2は、高さhdに配置することができ、ここで、Im{ΦL}=0である。これを、図15Aにグラフで示し、この図は、ΦUの虚部及び実部のグラフ、それぞれ172及び175を示す。補償端子T2は、高さhdに配置され、ここで、グラフ172で図示するようにIm{ΦU}=0である。この固定した高さで、コイルの位相ΦUは、グラフ175で図示するようにRe{ΦU}から決定することができる。
AC源212をコイル215に(例えば、結合を最大化する50Ωの点に)結合して、動作周波数でのコイルの少なくとも一部分と補償端子T2の並列共振のために、タップ233の位置を調整することができる。図15Bは、図14の一般的電気接続の模式図を示し、図中、V1は、タップ227を介してAC源212からコイル215の下側部分に印加される電圧であり、V2は、上側帯電端子T1に供給されるタップ224での電圧であり、V3は、タップ233を介して下側補償端子T2に印加される電圧である。抵抗Rp及びRdは、それぞれ帯電端子T1及び補償端子T2のグラウンド帰路抵抗を表す。帯電端子T1及び補償端子T2は、球、円筒、トロイド、リング、フード、又は容量構造の任意の他の組合せとして構成することができる。帯電端子T1及び補償端子T2のサイズは、端子に課される電荷Q1及びQ2のための十分大きな表面を提供するように選択することができる。一般的に、帯電端子T1を実用的な限り大きくすることが望ましい。帯電端子T1のサイズは、結果として帯電端子周囲の放電又はスパークとなり得る周囲空気のイオン化を回避するために、十分大きくすべきである。帯電端子T1及び補償端子T2それぞれの自己容量Cp及びCdは、例えば、式(24)を使用して決定することができる。
図15Bで理解することができるように、共振回路は、コイル215のインダクタンスの少なくとも一部分、補償端子T2の自己容量Cd、及び補償端子T2に関連付けられたグラウンド帰路抵抗Rdにより形成される。並列共振は、Cdを調整するために、補償端子T2に印加される電圧V3を調整することにより(例えば、コイル215上のタップ233の位置を調整することにより)、又は補償端子T2の高さ及び/又はサイズを調整することにより、確立することができる。コイルのタップ233の位置は、並列共振のために調整することができ、並列共振の結果として、接地杭218及び電流計236を通るグランド電流が最大点に到達することになる。補償端子T2の並列共振が確立された後で、AC源212用のタップ227の位置は、コイル215上の50Ωの点に調整することができる。
コイル215からの電圧V2は、帯電端子T1に印加することができ、タップ224の位置は、全実効高(hTE)の位相(Φ)がハンケル交差距離(Rx)での誘導表面ウェーブチルト角(WRx)とほぼ等しいように、調整することができる。コイルのタップ224の位置は、この動作点に到達するまで調整することができ、この結果として、電流計236を通るグラウンド電流が最大に増大することになる。この時点で、結果として生じる誘導表面導波プローブ200dによって励起された電界が、損失性導電媒体203の表面上の誘導表面導波モードに実質的にモード整合しており、結果として、損失性導電媒体203の表面に沿った誘導表面波の送出となる。これは、誘導表面導波プローブ200から延びる放射に沿って電界強度を測定することにより、検証することができる。
補償端子T2を含む回路の共振は、帯電端子T1の取り付け、及び/又はタップ224を介して帯電端子T1に印加される電圧の調整で変化することがある。共振のために補償端子回路を調整することは、帯電端子の接続のその後の調整を助成するが、ハンケル交差距離(Rx)での誘導表面ウェーブチルト(WRx)を確立することが必要ではない。システムを更に調整して、AC源212用のタップ227の位置をコイル215上の50Ωの点になるように繰り返して調整し、電流計236を通るグラウンド電流を最大化するようにタップ233の位置を調整することにより、結合を向上することができる。補償端子T2を含む回路の共振は、タップ227及び233の位置が調整されると、又は他の構成要素がコイル215に取り付けられると、ドリフトすることがある。
他の実装形態では、コイル215からの電圧V2は、帯電端子T1に印加することができ、タップ233の位置は、全実効高(hTE)の位相(Φ)がRxでの誘導表面ウェーブチルト角(Ψ)とほぼ等しいように、調整することができる。コイルのタップ224の位置は、動作点に到達するまで調整することができ、結果として、電流計236を通るグラウンド電流が実質的に最大に到達することになる。結果として生じる電界は、損失性導電媒体203の表面上の誘導表面導波モードに実質的にモード整合しており、損失性導電媒体203の表面に沿って誘導表面波が送出される。これは、誘導表面導波プローブ200から延びる径方向に沿って電界強度を測定することにより、検証することができる。システムを更に調整して、AC源212用のタップ227の位置をコイル215上の50Ωの点になるように繰り返して調整し、電流計236を通るグラウンド電流を最大化するようにタップ224及び/又は233の位置を調整することにより、結合を向上することができる。
図12に戻って、誘導表面導波プローブ200の動作は、誘導表面導波プローブ200に関連付けられた動作条件の変化に対して調整するように制御することができる。例えば、プローブ制御システム230を使用して、誘導表面導波プローブ200の動作を制御するように、給電ネットワーク209及び/又は帯電端子T1及び/又は補償端子T2の位置を制御することができる。動作条件としては、損失性導電媒体203の特性(例えば、導電率σ及び比誘電率εr)の変化、電界強度の変化、及び/又は誘導表面導波プローブ200の負荷の変化を挙げることができるが、これらに限定されない。式(41)〜(44)から理解することができるように、屈折率(n)、複素ブルースター角(θi,B及びΨi,B)、ウェーブチルト(|W|ejΨ)、及び複素実効高(heff=hpejΦ)は、例えば、気象条件から結果として生じる土の導電率及び誘電率の変化により影響を受けることがある。
例えば、導電率測定プローブ、誘電率センサ、グラウンド・パラメータ・メータ、電界計、電流モニタ、及び/又は負荷受信器などの装置を使用して、動作条件の変化をモニタして、プローブ制御システム230に現在の動作条件に関する情報を提供することができる。次に、プローブ制御システム230は、誘導表面導波プローブ200に1つ以上の調整を行なって、誘導表面導波プローブ200に対する指定された動作条件を維持することができる。例えば、湿度及び温度が変化すると、土の導電率もまた、変化することになる。導電率測定プローブ及び/又は誘電率センサは、誘導表面導波プローブ200の周囲の複数の位置に配置することができる。一般的に、動作周波数に対するハンケル交差距離Rx又はその付近の導電率及び/又は誘電率をモニタすることが望ましいであろう。導電率測定プローブ及び/又は誘電率センサは、誘導表面導波プローブ200の周囲の複数の位置(例えば、それぞれの象限内の)に配置することができる。
図16を参照して、垂直軸zに沿って配置された帯電端子T1及び帯電端子T2を含む誘導表面導波プローブ200eの例を示す。誘導表面導波プローブ200eは、領域1を構成する損失性導電媒体203の上に配置されている。加えて、第2の媒体206は、損失性導電媒体203と境界界面を共有し、領域2を構成する。帯電端子T1及びT2は、損失性導電媒体203の上に配置される。帯電端子T1は、物理的高さH1に配置され、帯電端子T2は、高さH2で垂直軸zに沿ってT1の真下に配置され、H2は、H1未満である。誘導表面導波プローブ200eによって提示される伝送構造の高さhは、h=H1−H2である。誘導表面導波プローブ200eは、励起源212を帯電端子T1及びT2に結合する給電ネットワーク209を含む。
帯電端子T1及び/又はT2は、実用的に可能な限り多くの電荷を保持するサイズにすることができる、電荷を保持することができる導体塊を含む。帯電端子T1は、自己容量C1を有し、帯電端子T2は、自己容量C2を有し、それらは、例えば、式(24)を使用して決定することができる。帯電端子T2の真上の帯電端子T1の配置によって、帯電端子T1とT2との間に、相互静電容量CMが生成される。帯電端子T1及びT2は、同一である必要はなく、それぞれが、別個のサイズ及び形状を有することができ、異なる導電材料を含むことができることに留意されたい。最終的に、誘導表面導波プローブ200eによって送出される誘導表面波の電界強度は、端子T1上の電荷の量に正比例する。次に、電荷Q1は、Q1=C1Vであるため、帯電端子T1に関連付けられた自己容量C1に比例し、式中、Vは、帯電端子T1に課される電圧である。
既定の動作周波数で動作するように適切に調整されると、誘導表面導波プローブ200eは、損失性導電媒体203の表面に沿った誘導表面波を生成する。励起源212は、構造を励起するために誘導表面導波プローブ200eに印加される既定の周波数の電気エネルギを生成することができる。誘導表面導波プローブ200eによって生成された電磁界が、損失性導電媒体203と実質的にモード整合される場合、電磁界は、結果としてほとんど反射しない又は反射しない複素ブルースター角で入射する波面を実質的に合成する。したがって、表面導波路プローブ200eは、放射波を生成しないが、損失性導電媒体203の表面に沿った誘導表面進行波を送出する。励起源212からのエネルギは、Zenneck表面電流として誘導表面導波プローブ200eの実効伝送範囲内に配置された1つ以上の受信器に伝送することができる。
損失性導電媒体203の表面上の放射Zenneck表面電流Jρ(ρ)の漸近線を近接でJ1(ρ)かつ遠方でJ2(ρ)となるように、以下の式のように決定することができる。
式中、I1は、第1の帯電端子T1上の電荷Q1を供給する誘導電流であり、I2は、第2の帯電端子T2上の電荷Q2を供給する誘導電流である。上側帯電端子T1上の電荷Q1は、Q1=C1V1により決定され、式中、C1は、帯電端子T1の絶縁静電容量である。Leontovich境界条件に従い、第1の帯電端子上の持ち上げられた振動する電荷Q1の準静的電界により注入された損失性導電媒体203内の放射電流寄与である、
により得られる上述したJ1に対する第3の成分が存在することに留意されたい。量Zρ=jωμo/γeは、損失性導電媒体の放射インピーダンスであり、式中、γe=(jωμ1σ1−ω2μ1ε1)1/2である。
式(90)及び(91)により上述したような近接及び遠方の放射電流を表す漸近線は、複素量である。各種実施形態によれば、物理的表面電流J(ρ)は、大きさ及び位相において電流の漸近線に可能な限り近く整合するように合成される。すなわち、近接で、|J(ρ)|は、|J1|に対して接線となることになり、遠方で、|J(ρ)|は、|J2|に対して接線となることになる。また、各種実施形態によれば、J(ρ)の位相は、近接のJ1の位相から遠方のJ2の位相に遷移しなければならない。
誘導表面波を送出するように伝送の場所で誘導表面波モードに整合するために、遠方の表面電流|J2|の位相は、e−jβ(ρ2−ρ1)に対応する伝搬位相に約45度又は225度の定数を加えただけ、近接の表面電流|J1|の位相とは異ならなければならない。これは、
に対して、π/4付近に1つ及び5π/4付近に1つの、2つの根が存在するためである。適切に調整された合成放射表面電流は、以下の式である。
これは式(17)と一致していることに留意されたい。マクスウェル方程式により、そのようなJ(ρ)の表面電流は、自動的に、以下の式に従う電界を生成する。
したがって、整合されることになる誘導表面波モードに対する遠方の表面電流|J2|と近接の表面電流|J1|との間の位相の差は、式(1)〜(3)と一致する式(93)〜(95)のハンケル関数の特性に起因する。式(1)〜(6)及び(17)並びに式(92)〜(95)によって表現される電界は、地上波の伝搬に関連付けられた放射電磁界ではなく、損失性の境界面に拘束された伝送線モードの性質を有することを認識することは重要である。
所与の位置での誘導表面導波プローブ200eの所与の設計に対する適切な電圧の大きさ及び位相を得るために、反復的手法を使用することができる。具体的には、生成される放射表面電流密度を決定するために、端子T1及びT2への給電電流、帯電端子T1及びT2上の電荷、並びに損失性導電媒体203内のそれらの影像を考慮して、誘導表面導波プローブ200eの所与の励起及び構成の解析を実行することができる。このプロセスは、所望のパラメータに基づいて所与の誘導表面導波プローブ200eの最適な構成及び励起が決定されるまで、繰り返して実行することができる。所与の誘導表面導波プローブ200eが最適なレベルで動作しているか否かを判定するのを助成するために、誘導表面導波プローブ200eの位置での領域1の導電率(σ1)及び領域1の誘電率(ε1)に対する値に基づいて式(1)〜(12)を使用して、誘導電界強度曲線103(図1)を生成することができる。そのような誘導電界強度曲線103は、測定された電界強度を誘導電界強度曲線103により示される大きさと比較して、最適な伝送が実現されているか否かを判定することができるように、動作に対する基準を提供することができる。
最適化された条件に到達するために、誘導表面導波プローブ200eに関連付けられた様々なパラメータを調整することができる。誘導表面導波プローブ200eを調整するために変更することができる1つのパラメータは、損失性導電媒体203の表面に対する帯電端子T1及び/又はT2の1つ又は両方の高さである。加えて、帯電端子T1とT2との間の距離又は間隔もまた、調整することができる。そのようにすることで、理解することができるように、帯電端子T1及びT2と損失性導電媒体203との間の相互静電容量CM又はなんらかの拘束電荷を最小化する又は別の方法で変更することができる。それぞれの帯電端子T1及び/又はT2のサイズもまた、調整することができる。帯電端子T1及び/又はT2のサイズを変更することにより、理解することができるように、対応する自己容量C1及び/又はC2、並びに相互静電容量CMを変更することになる。
また更に、調整することができる別のパラメータは、誘導表面導波プローブ200eに関連付けられた給電ネットワーク209である。これは、給電ネットワーク209を構成する誘導リアクタンス及び/又は容量リアクタンスのサイズを調整することにより、実現することができる。例えば、そのような誘導リアクタンスがコイルを含む場合、そのようなコイル上の巻数を調整することができる。最終的に、給電ネットワーク209に対する調整を行なって、給電ネットワーク209の電気長を変更し、それによって、帯電端子T1及びT2上の電圧の大きさ及び位相に影響を及ぼすことができる。
理解することができるように、様々な調整を行うことにより実行される伝送の反復は、コンピュータモデルを使用することにより、又は物理的構造を調整することにより、実施することができることを留意されたい。上述の調整を行なうことにより、上述した式(90)及び(91)で規定される誘導表面波モードの同じ電流J(ρ)を近似する、対応する「近接」表面電流J1及び「遠方」表面電流J2を生成することができる。そうすることにより、結果として生じる電磁界は、損失性導電媒体203の表面上の誘導表面波モードに実質的に又は近似的にモード整合されることになる。
図16の例に示さないが、誘導表面導波プローブ200eの動作は、誘導表面導波プローブ200に関連付けられた動作条件の変化に対して調整するように制御することができる。例えば、図12に示すプローブ制御システム230を使用して、誘導表面導波プローブ200eの動作を制御するように、給電ネットワーク209並びに/又は帯電端子T1及び/若しくはT2の位置及び/若しくはサイズを制御することができる。動作条件としては、損失性導電媒体203の特性(例えば、導電率σ及び比誘電率εr)の変化、電界強度の変化、及び/又は誘導表面導波プローブ200eの負荷の変化を挙げることができるが、これらに限定されない。
ここで図17を参照して、誘導表面導波プローブ200fとして本明細書で表記された、図16の誘導表面導波プローブ200eの例を示す。誘導表面導波プローブ200fは、損失性導電媒体203(例えば、地球)によって提示された平面に実質的に垂直な垂直軸zに沿って配置された帯電端子T1及びT2を含む。第2の媒体206は、損失性導電媒体203の上にある。帯電端子T1は、自己容量C1を有し、帯電端子T2は、自己容量C2を有する。動作中、電荷Q1及びQ2が、任意の所与の時点に帯電端子T1及びT2に印加される電圧に依存して、それぞれ帯電端子T1及びT2上に課される。相互静電容量CMは、帯電端子T1とT2との間に、その間の距離に依存して存在し得る。加えて、拘束静電容量は、損失性導電媒体203に対するそれぞれの帯電端子T1及びT2の高さに依存して、それぞれの帯電端子T1及びT2と損失性導電媒体203との間に存在し得る。
誘導表面導波プローブ200fは、帯電端子T1及びT2のそれぞれに結合された一対のリードを有するコイルL1aを含む誘導インピーダンスを含む給電ネットワーク209を含む。一実施形態では、コイルL1aは、誘導表面導波プローブ200fの動作周波数での波長の半分(1/2)の電気的長さを有するように規定される。
コイルL1aの電気的長さは、動作周波数での波長の約半分(1/2)として規定されるが、コイルL1aは、他の値での電気長で規定することができることが理解される。一実施形態によれば、コイルL1aが動作周波数での波長の約半分の電気長を有するという事実は、帯電端子T1及びT2上に最大電圧差が生成されるという利点を提供する。それにもかかわらず、誘導表面導波プローブ200fを調整して誘導表面波モードの最適な励起を得るときに、コイルL1aの長さ又は直径は、増大又は減少させることができる。コイル長の調整は、コイルの1つ又は両方の端部に配置されたタップにより提供することができる。一実施形態では、誘導インピーダンスは、誘導表面導波プローブ200fの動作周波数での波長の1/2より著しく短い又は長い電気長を有するように規定される場合とすることができる。
励起源212は、磁気結合によって給電ネットワーク209に結合することができる。具体的には、励起源212は、コイルL1aに誘導結合されたコイルLPに結合される。これは、理解することができるように、リンク結合、タップ付きコイル、可変リアクタンス、又は他の結合手法により行うことができる。このために、理解することができるように、コイルLPは、一次コイルとして機能し、コイルL1aは、二次コイルとして機能する。
所望の誘導表面波の伝送のために誘導表面導波プローブ200fを調整するために、それぞれの帯電端子T1及びT2の高さは、損失性導電媒体203に対して、及び互いに対して、変更することができる。また、帯電端子T1及びT2のサイズを変更することができる。加えて、巻きを追加若しくは除去することにより、又はコイルL1aのなんらかの他の寸法を変更することにより、コイルL1aのサイズを変更することができる。コイルL1aはまた、図17に示すように、電気長を調整するための1つ以上のタップを含むことができる。帯電端子T1又はT2のいずれかに接続されたタップの位置もまた、調整することができる。
次に図18A、18B、18C、及び図19を参照して、無線電力供給システムに表面誘導波を使用するための、一般化した受信回路の例を示す。図18A及び18B〜18Cは、それぞれ、線状プローブ303及び同調共振器306を含む。図19は、本開示の各種実施形態に係る、磁気コイル309である。各種実施形態によれば、線状プローブ303、同調共振器306、及び磁気コイル309のうちのそれぞれ1つを用いて、各種実施形態による損失性導電媒体203の表面上の誘導表面波の形態で伝送された電力を受信することができる。上述したように、一実施形態では、損失性導電媒体203は、テレストリアル媒体(又は地球)を含む。
具体的に図18Aを参照して、線状プローブ303の出力端子312での開回路端子電圧は、線状プローブ303の実効高に依存する。このために、端子点の電圧は、以下の式のように計算することができる。
式中、Eincは、1V/mでの線状プローブ303上に誘導された入射電界の強度であり、dlは、線状プローブ303の方向に沿った積分の要素であり、heは、線状プローブ303の実効高である。電気的負荷315は、インピーダンス整合ネットワーク318を介して出力端子312に結合される。
線状プローブ303が上述したように誘導表面波を受けるとき、場合によって、共役インピーダンス整合ネットワーク318を介して電気的負荷315に印加することができる電圧が、出力端子312にわたって生じる。電気的負荷315への電力の流れを促進するために、後述するように、電気的負荷315は、線状プローブ303に実質的にインピーダンス整合されていなければならない。
図18Bを参照して、誘導表面波のウェーブチルトに等しい位相シフトを保有するグラウンド電流励起コイル306aは、損失性導電媒体203の上に持ち上げられた(又はつり下げられた)帯電端子TRを含む。帯電端子TRは、自己容量CRを有する。加えて、損失性導電媒体203の上の帯電端子TRの高さに依存して、帯電端子TRと損失性導電媒体203との間に、拘束された静電容量(図示せず)もまた存在する。拘束された静電容量は、好ましくは実行可能な限り最小化されなければならないが、これは、すべての場合において全面的に必要でなくてもよい。
同調共振器306aもまた、位相シフトΦを有するコイルLRを含む受信器ネットワークを含む。コイルLRの1つの端部は、帯電端子TRに結合され、コイルLRの他方の端部は、損失性導電媒体203に結合される。受信器ネットワークは、コイルLRを帯電端子TRに結合する垂直供給線導体を含むことができる。このために、コイルLR(同調共振器LR−CRと呼ばれる場合もある)は、帯電端子CR及びコイルLRが直列に配置されるとき、直列調整された共振器を含む。コイルLRの位相遅延は、帯電端子TRのサイズ及び/若しくは高さを変更することにより、並びに/又は構造の位相Φがウェーブチルト角Ψに実質的に等しくなるようにコイルLRのサイズを調整することにより、調整することができる。垂直供給線の位相遅延もまた、例えば、導体長を変更することにより、調整することができる。
例えば、自己容量CRにより提示されるリアクタンスは、1/jωCRとして計算される。理解することができるように、構造306aの全静電容量はまた、帯電端子TRと損失性導電媒体203との間の静電容量を含むことができ、構造306aの全静電容量は、自己容量CR及びなんらかの拘束された静電容量の両方から計算することができることに留意されたい。一実施形態によれば、帯電端子TRは、なんらかの拘束された静電容量を実質的に低減又は除去するような高さに上げることができる。拘束された静電容量の存在は、上述したように帯電端子TRと損失性導電媒体203との間の静電容量の測定値から判定することができる。
別個の要素のコイルLRにより提示される誘導リアクタンスは、jωLとして計算することができ、式中、Lは、コイルLRの集中素子インダクタンスである。コイルLRが分布素子である場合、その等価な端子点の誘導リアクタンスは、従来の手法によって決定することができる。構造306aを整調するために、動作周波数での表面導波路へのモード整合のために位相遅延がウェーブチルトに等しいように、調整を行なうことになる。この条件下で、受信構造は、表面導波路に「モード整合」していると考えることができる。電力を負荷に結合するために、プローブと電気的負荷327との間に、構造周囲の変圧器リンク及び/又はインピーダンス整合ネットワーク324を挿入することができる。プローブ端子321と電気的負荷327との間にインピーダンス整合ネットワーク324を挿入することにより、電気的負荷327への最大電力伝送のための共役整合条件に影響を及ぼすことができる。
動作周波数での表面電流の存在下に置かれた場合、電力は、表面誘導波から電気的負荷327に送出されることになる。このために、電気的負荷327は、磁気結合、容量結合、又は導電(直接タップ)結合によって、構造306aに結合することができる。結合ネットワークの素子は、理解することができるように、集中素子又は分布素子とすることができる。
図18Bに示す実施形態では、磁気結合が用いられており、トランス一次コイルとして機能するコイルLRに対する二次コイルとして、コイルLSが配置されている。理解することができるように、コイルLSは、同じコア構造の周囲に幾何学的に巻いて、結合した磁束を調整することにより、コイルLRにリンク結合することができる。加えて、受信構造306aは、直列同調した共振器を含むが、適切な位相遅延の並列同調共振器又は更に分布素子共振器もまた、使用することができる。
電磁界に浸漬された受信構造は、電界からのエネルギを結合することができるが、偏波整合した構造は、結合を最大化することにより、最も良好に機能し、導波モードへのプローブ結合に関する従来の規則を遵守しなければならないことを理解することができる。例えば、TE20(横電気モード)導波路プローブは、TE20モードで励起された従来の導波路からエネルギを抽出するために最適にすることができる。同様に、これらの場合では、モード整合及び位相整合した受信構造は、表面誘導波からの電力を結合するために最適化することができる。損失性導電媒体203の表面上の誘導表面導波プローブ200によって励起された誘導表面波は、開放導波路の導波モードと考えることができる。導波路損失を除いて、ソースエネルギは、完全に回収することができる。有用な受信構造は、電界(E-field)結合、磁界(H-field)結合、又は表面電流で励起することができる。
受信構造を調整して、受信構造の近傍の損失性導電媒体203の局所的な特性に基づいて、誘導表面波との結合を増大又は最大化することができる。これを実現するために、受信構造の位相遅延(Φ)を調整して、受信構造での表面進行波のウェーブチルト角(Ψ)を整合することができる。適切に構成された場合、受信構造は、次に、複素深さz=−d/2での完全導電性影像グラウンド平面に対する共振のために同調することができる。
例えば、コイルLR及びコイルLRと帯電端子TRとの間に接続された垂直供給線を含む、図18Bの同調した共振器306aを含む受信構造を考えてみる。帯電端子TRを損失性導電媒体203の上の規定された高さに配置して、コイルLR及び垂直供給線の全位相シフトΦは、同調した共振器306aの位置でのウェーブチルト角(Ψ)に整合することができる。式(22)から、ウェーブチルトは、漸近的に以下の式になることを理解することができる。
式中、εrは、比誘電率を含み、σ1は、受信構造の位置での損失性導電媒体203の導電率であり、εoは、自由空間の誘電率であり、ω=2πfであり、fは、励起の周波数である。したがって、ウェーブチルト角(Ψ)は、式(97)から決定することができる。
同調共振器306aの全位相遅延(Φ=θc+θy)は、コイルLRによる位相遅延(θc)及び垂直供給線の位相遅延(θy)の両方を含む。垂直供給線の長さlwに沿った空間位相遅延は、θy=βwlwにより得ることができ、式中、βwは、垂直供給線導体に対する伝搬位相定数である。コイル(又はヘリカル遅延線)に起因する位相遅延は、θc=βplCであり、式中、lCは、物理的長さであり、以下の式は、伝搬係数である。
式中、Vfは、構造上の速度係数であり、λ0は、供給される周波数での波長であり、λpは、速度係数Vfから結果として生じる伝搬波長である。位相遅延(θc+θy)のうちの1つ又は両方を調整して、位相シフトΦをウェーブチルト角(Ψ)に整合することができる。例えば、図18BのコイルLR上のタップ位置を調整して、コイルの位相遅延(θc)を調整し、全位相シフトをウェーブチルト角に整合する(Φ=Ψ)ことができる。例えば、コイルの一部分を、図18Bに示すようにタップ接続により回避することができる。垂直供給線導体もまた、タップを介してコイルLRに接続することができ、コイル上のタップの位置を調整して、全位相シフトをウェーブチルト角に整合することができる。
同調した共振器306aの位相遅延(Φ)が調整されたら、次に、帯電端子TRのインピーダンスを調整して、複素深さz=−d/2での完全導電性影像グラウンド平面に対して共振するよう同調することができる。これは、コイルLR及び垂直供給線の進行波の位相遅延を変更することなく帯電端子T1の静電容量を調整することにより、実現することができる。この調整は、図9A及び9Bに関して説明したものと同様である。
複素影像平面に対する損失性導電媒体203を「見下ろして」見たインピーダンスは、以下の式により得られる。
式中、
である。地球の上の垂直に偏波したソースに対して、複素影像平面の深さは、以下の式により得られる。
式中、μ1は、損失性導電媒体203の透磁率であり、ε1=εrεoである。
同調共振器306aの底部で、受信構造を「見上げて」見たインピーダンスは、図9Aに示すようにZ↑=Zbaseである。以下の式の端子インピーダンスで、
(式中、CRは、帯電端子TRの自己容量である)、同調共振器306aの垂直供給線導体を「見上げて」見たインピーダンスは、以下の式により得られる。
同調共振器306aのコイルLRを「見上げて」見たインピーダンスは、以下の式により得られる。
損失性導電媒体203を「見下ろして」見たリアクタンス成分(Xin)を同調共振器306aを「見上げて」見たリアクタンス成分(Xbase)と整合することにより、誘導表面導波モードへの結合を最大化することができる。
次に図18Cを参照して、受信構造の上部に帯電端子TRを含まない同調共振器306bの例を示す。この実施形態では、同調共振器306bは、コイルLRと帯電端子TRとの間に結合された垂直供給線を含まない。したがって、同調共振器306bの全位相シフト(Φ)は、コイルLRによる位相遅延(θc)のみを含む。図18Bの同調共振器306aと同様に、コイルの位相遅延θcを調整して、式(97)から決定されたウェーブチルト角(Ψ)を整合することができ、これにより、結果としてΦ=Ψとなる。表面導波モードに結合された受信構造を用いて電力抽出が可能であるが、受信構造を調整して、帯電端子TRによって提供される可変リアクタンス負荷なしに誘導表面波との結合を最大化することは困難である。
図18Dを参照して、受信構造を調整して、損失性導電媒体203の表面上の誘導表面導波モードに実質的にモード整合する例を示す流れ図180を示す。181で開始して、受信構造が(図18Bの同調共振器306aの)帯電端子TRを含む場合、184で、帯電端子TRは、損失性導電媒体203の上の定義された高さに配置される。誘導表面導波プローブ200によって表面誘導波が確立されたら、帯電端子TRの物理的高さ(hp)は、実効高より低いものとすることができる。物理的高さを選択して、帯電端子TR上の拘束電荷を低減又は最小化することができる(例えば、帯電端子の球直径の4倍)。受信構造が(例えば、図18Cの同調共振器306bの)帯電端子TRを含まない場合、流れは、187に進む。
187で、受信構造の電気的位相遅延Φは、損失性導電媒体203の局所的な特性によって定義された複素ウェーブチルト角Ψに整合される。ヘリカルコイルの位相遅延(θc)及び/又は垂直供給線の位相遅延(θy)は、Φをウェーブチルト(W)の角度(Ψ)に等しくするように調整することができる。ウェーブチルト角(Ψ)は、式(86)から決定することができる。次に、電気的位相Φは、ウェーブチルト角に整合することができる。例えば、電気的位相遅延Φ=θc+θyは、コイルLRの幾何学的パラメータ及び/又は垂直供給線導体の長さ(又は高さ)を変更することにより調整することができる。
次に190で、帯電端子TRの負荷インピーダンスは、同調共振器306aの等価影像平面モデルを共振させるように整調させることができる。受信構造の下の導電性影像グラウンド平面139(図9A)の深さ(d/2)は、式(100)、及び局所的に測定することができる受信構造での損失性導電媒体203(例えば、地球)の値を使用して決定することができる。その複素深さを使用して、影像グラウンド平面139と損失性導電媒体203の物理的境界136(図9A)との間の位相シフト(θd)は、θd=βod/2を使用して決定することができる。次に、損失性導電媒体203を「見下ろして」見たようなインピーダンス(Zin)は、式(99)を使用して決定することができる。この共振関係は、誘導表面波との結合を最大化すると考えることができる。
コイルLRの調整されたパラメータ及び垂直供給線導体の長さに基づいて、速度係数、位相遅延、並びにコイルLR及び垂直供給線のインピーダンスを決定することができる。加えて、帯電端子TRの自己容量(CR)は、例えば、式(24)を使用して決定することができる。コイルLRの伝搬係数(βp)は、式(98)を使用して決定することができ、垂直供給線に対する伝搬位相定数(βw)は、式(49)を使用して決定することができる。自己容量並びにコイルLR及び垂直供給線の決定された値を使用して、コイルLRを「見上げて」見たような同調共振器306aのインピーダンス(Zbase)は、式(101)、(102)及び(103)を使用して決定することができる。
図9Aの等価影像平面モデルはまた、図18Bの同調共振器306aにも適用される。同調共振器306aを同調して、Zbaseのリアクタンス成分XbaseがZinのXinのリアクタンス成分を相殺する、又はXbase+Xin=0であるように、帯電端子TRの負荷インピーダンスZRを調整することにより、複素影像平面に対して共振させることができる。したがって、同調共振器306aのコイルを「見上げた」物理的境界136(図9A)でのインピーダンスは、損失性導電媒体203を「見下ろした」物理的境界136でのインピーダンスの共役である。負荷インピーダンスZRは、帯電端子TRから見た電気的位相遅延Φ=θc+θyを変更することなく帯電端子TRの静電容量(CR)を変更することにより、調整することができる。反復的手法を採用して、導電性影像グラウンド平面139に対する等価影像平面モデルの共振のために負荷インピーダンスZRを同調することができる。この方法で、損失性導電媒体203(例えば、地球)の表面に沿った誘導表面導波モードへの電界の結合を、向上及び/又は最大化することができる。
図19を参照して、磁気コイル309は、電気的負荷336にインピーダンス整合ネットワーク333を介して結合された受信回路を含む。誘導表面波からの電力の受信及び/又は抽出を促進するために、磁気コイル309は、誘導表面波の磁束Hφが磁気コイル309を通り、それによって、磁気コイル309内に電流を誘導して、その出力端子330で端子点電圧を生成するように、配置することができる。単一の巻きのコイルに結合された誘導表面波の磁束は、以下の式により表現される。
式中、Fは、結合した磁束であり、μrは、磁気コイル309のコアの実効比透磁率であり、μoは、自由空間の透磁率であり、
は、入射磁界強度ベクトルであり、
は、巻きの断面区間に垂直な単位ベクトルであり、ACSは、それぞれのループによって囲まれた区間である。磁気コイル309の断面区間にわたって均一な入射磁界への最大結合に向けたN巻きの磁気コイル309に対して、磁気コイル309の出力端子330で発生する開回路で誘導された電圧は、以下の式である。
式中、これらの変数は、上記で定義されている。磁気コイル309は、場合によって、分布した共振器として、又はその出力端子330にわたる外部コンデンサを有してのいずれかで、誘導表面波の周波数に同調して、次に、共役インピーダンス整合ネットワーク333を介して外部電気的負荷336にインピーダンス整合することができる。
磁気コイル309によって提示された結果として生じる回路及び電気的負荷336が適切に調整され、インピーダンス整合ネットワーク333を介して共役インピーダンス整合されることを仮定して、次に、磁気コイル309内に誘導された電流を用いて、電気的負荷336に最適に電力を供給することができる。磁気コイル309によって提示された受信回路は、グラウンドに物理的に接続する必要がないという利点を提供する。
図18A、18B、18C、及び図19を参照して、線状プローブ303によって提示された受信回路、モード整合した構造306、及び磁気コイル309はそれぞれ、上述した誘導表面導波プローブ200の実施形態のいずれか1つから伝送される電力の受信を促進する。このために、理解することができるように、受信したエネルギを使用して、共役整合ネットワークを介して電気的負荷315/327/336に電力を供給することができる。これは、放射された電磁界の形態で伝送されて受信器に受信することができる信号と対照的である。そのような信号は、非常に低い利用可能な電力を有し、そのような信号の受信器は、送信器に負荷を加えない。
線状プローブ303によって提示された受信回路、モード整合した構造306、及び磁気コイル309は、誘導表面導波プローブ200に適用され、それによって、そのような受信回路が受ける誘導表面波を生成する励起源212(例えば、図3、図12、及び図16)に負荷を加えることになることもまた、上述した誘導表面導波プローブ200を使用して生成される本誘導表面波の特性である。これは、上述した所与の誘導表面導波プローブ200によって生成される誘導表面波が伝送線モードを含むという事実を反映している。対照として、放射電磁波を生成する放射アンテナを駆動する電源は、用いられる受信器の数に関わらず、受信器によって負荷を加えられない。
したがって、1つ以上の誘導表面導波プローブ200、並びに線状プローブ303、同調したモード整合した構造306、及び/又は磁気コイル309の形態の1つ以上の受信回路は、ともに、無線分配システムを構成することができる。上述したような誘導表面導波プローブ200を使用した誘導表面波の伝送の距離が周波数に依存することを考えると、広いエリアにわたって、かつグローバルにでも、無線電力分配を実現することが可能である。
今日幅広く研究された従来の無線送電/分配系は、放射電磁界からの「環境発電(energy harvesting)」、及び誘導又はリアクタンス性の近接場に結合するセンサをも含む。対照的に、本無線電力系は、遮断されない場合には永久に失われる放射の形態で電力を浪費しない。また、本開示の無線電力系は、従来の相互リアクタンス結合した近接場系と同様の非常に短い範囲に限定されない。本明細書で開示する無線電力系は、新規の表面誘導伝送線モードにプローブ結合し、これは、導波路により負荷に、又は遠方の発電機に直接結線された負荷に、電力を送出することと等価である。60Hzでの従来の高圧電力線における伝送損失に対して、非常に低周波数では小さな、伝送電界強度を維持するのに必要とされる電力に加えて表面導波路内で消散する電力を考慮しないで、発電機の電力のすべては、所望の電気的負荷のみに行く。電気的負荷の需要が終了すると、ソースの発電は、相対的に空いている。
次に、図20A〜図20Eを参照して、以下の説明を参照して使用される様々な回路図記号の例を示す。図20Aを具体的に参照して、誘導表面導波プローブ200a、200b、200c、200e、200d、若しくは200f、又はそれらの任意の変形のいずれか1つを表す記号を示す。以下の図面及び説明において、この記号の表現は、誘導表面導波プローブPと呼ばれることになる。以下の説明を簡単にするために、誘導表面導波プローブPに対するあらゆる参照は、誘導表面導波プローブ200a、200b、200c、200e、200d、若しくは200f、又はそれらの変形のいずれか1つに対する参照である。
同様に、図20Bを参照して、線形プローブ303(図18A)、同調した共振器306(図18B〜図18C)、又は磁気コイル309(図19)のうちのいずれか1つを含むことができる誘導表面波受信構造を表す記号を示す。以下の図面及び説明において、この記号の表現は、誘導表面波受信構造Rと呼ばれることになる。以下の説明を簡単にするために、誘導表面波受信構造Rに対するあらゆる参照は、線形プローブ303、同調した共振器306、若しくは磁気コイル309、又はそれらの変形のうちのいずれか1つに対する参照である。
更に、図20Cを参照して、線形プローブ303(図18A)を具体的に表す記号を示す。以下の図面及び説明において、この記号の表現は、誘導表面波受信構造RPと呼ばれることになる。以下の説明を簡単にするために、誘導表面波受信構造RPに対するあらゆる参照は、線形プローブ303又はその変形に対する参照である。
更に、図20Dを参照して、同調した共振器306(図18B〜図18C)を具体的に表す記号を示す。以下の図面及び説明において、この記号の表現は、誘導表面波受信構造RRと呼ばれることになる。以下の説明を簡単にするために、誘導表面波受信構造RRに対するあらゆる参照は、同調した共振器306又はその変形に対する参照である。
更に、図20Eを参照して、磁気コイル309(図19)を具体的に表す記号を示す。以下の図面及び説明において、この記号の表現は、誘導表面波受信構造RMと呼ばれることになる。以下の説明を簡単にするために、誘導表面波受信構造RMに対するあらゆる参照は、磁気コイル309又はその変形に対する参照である。
図21〜図27を参照して、誘導表面導波プローブPから送出される誘導表面波を用いて位置を特定する各種実施形態を開示する。ナビゲーションデバイスは、複数の誘導表面導波プローブPから送出される複数の誘導表面波を検出する。誘導表面波の到着の時間差、誘導表面波のそれぞれが対応する誘導表面導波プローブPからナビゲーションデバイスの位置まで進行するのにかかった時間、誘導表面波の元の強度と比較したナビゲーションデバイスの位置での誘導表面波の強度差、ナビゲーションデバイスの位置で測定された誘導表面波間の位相シフト、又はこれらの手法のいくつかの組合せを分析することによって、地球上のナビゲーションデバイスの位置を判定することができる。更に、いくつかの実施形態では、ナビゲーションデバイスは、誘導表面波の1つ以上によって電力を供給されてもよい。また、誘導表面波は、ナビゲーションデバイス及び/又は他のデバイスの精度を改善するために、時刻同期に使用することができる。
誘導表面波の範囲は、誘導表面波の周波数に依存する。例えば、約20kHz以下の周波数を有する誘導表面波は一般に、地球の周りを進行又は伝播することができる。これらの周波数では、本開示の各種実施形態は、全地球測位及びナビゲーションに使用されてもよい。より高い周波数は、より短い距離、例えば、数千マイル、数百マイル、又は数十マイルしか進まず、各種実施形態を位置及びナビゲーションについて地域的な利用に限定する。
具体的に図21を参照して、各種実施形態に係るナビゲーションユニット400を示す。ナビゲーションユニット400は、受信器403と、アンテナ取付部406と、コンピューティングデバイス409とを含む。受信器403はアンテナ取付部406に接続されており、次に、アンテナ取付部406はコンピューティングデバイス409に接続されている。いくつかの実施形態では、ナビゲーションユニット400はディスプレイを含むことができる。このような実施形態では、ディスプレイは、例えば、液晶表示(LCD)ディスプレイ、ガスプラズマベースフラットパネルディスプレイ、有機EL(OLED)ディスプレイ、電気泳動インク(Eインク)ディスプレイ、LCDプロジェクター、又は他の種類のディスプレイデバイスのような1つ以上のデバイスなどを含むことができる。
いくつかの実施形態では、ナビゲーションユニット400の全部又は一部分は、ナビゲーションユニット400の各種構成要素を保護する外部ケース内に囲まれてもよい。例えば、いくつかの実施形態では、ナビゲーションユニット400は、受信器403と、アンテナ取付部406と、コンピューティングデバイス409とを単一のシェル内に囲んだポータブル又はハンドヘルドユニットとすることができる。このような実施形態は、タブレットコンピュータ、セルラーフォン、スマートフォン、パーソナルデジタルアシスタント(PDA)、及び/又は同様のモバイルコンピューティングデバイスのようなモバイルコンピューティングデバイスを含むことができる。このような実施形態はまた、パーソナルナビゲーションデバイス、ハンドヘルドナビゲーションデバイス、又は、バス、自動車、モータボート若しくは同様の車輌のダッシュボードに取付可能なナビゲーションユニットのような専用のナビゲーションユニットを含むこともできる。他の実施形態では、受信器403は、リモートであってもコンピューティングデバイス409の外にあってもよく、アンテナ取付け406を介してそのコンピューティングデバイスに接続されていてもよい。このような実施形態は、例えば、船上又は飛行機内に見られるもののような車輌ナビゲーションユニット400を含んでもよい。
受信器403は、誘導表面波を受信可能な1つ以上の構造に対応することができる。受信器403は、前述したように、例えば、線形プローブ、同調した共振器、磁気コイル及び/又は誘導表面波を受信する同様の構造を含むことができる。いくつかの実施形態では、受信器403は複数の受信器403を表すことができ、それぞれ他の受信器403から異なる周波数で誘導表面波を受信するように同調されている。各種実施形態では、受信器403は、同時に異なる周波数で複数の誘導表面波を受信すべく同調されるように構成されてもよい。いくつかの実施形態では、受信器403は、第1の周波数で誘導表面波を検出、受信及び/又は測定し、その後、第2の周波数に切り替え、第2の周波数で第2の誘導表面波を検出するべく、周波数を変えるように構成されてもよい。アンテナ取付部406は、受信器403をコンピューティングデバイス409に接続可能な任意の物理的構造に対応していてもよい。
コンピューティングデバイス409は、コンパス411を含むことができる。コンパス411は、磁北又は真北の方向を識別することができる任意の回路、システム、又は装置に対応することができる。したがって、コンパス411は、磁北極に依拠する本明細書に記載する実施形態用の磁気コンパス若しくは磁力計、又は真北に依拠する本明細書に記載する実施形態用の非磁気コンパス(例えば、ジャイロコンパス、光学コンパス、又は他の非磁気コンパス)に対応することができる。
コンピューティングデバイス409は、両方ともローカルインターフェース419に結合されたプロセッサ413及びメモリ416を有する、少なくとも1つのプロセッサ回路をも含むことができる。ローカルインターフェース419は、例えば、理解され得るように、付随するアドレス/制御バス又は他のバス構造を有するデータバスを含むことができる。
プロセッサ413によって実行可能なデータ及びいくつかの構成要素の両方が、メモリ416に記憶される。特に、マルチラテレーションアプリケーション423、及び潜在的に他のアプリケーションがメモリ416に記憶され、プロセッサ413によって実行可能である。また、データストア426をメモリ416に記憶することができ、データストア426は、地図データ429、慣性データ431、位相シフト曲線433及び/又は潜在的に他のデータを記憶することができる。加えて、オペレーディングシステムはがメモリ416に記憶され、プロセッサ413によって実行可能であってもよい。
地図データ429は、ナビゲーションユニット400がナビゲートしている可能性がある、又は地理的位置が発生している可能性がある1つ以上の地理を表す。地図データ429は、グローバルデータ、又は、半球、大陸、大洋、海、湖、国、州/県、市及び/若しくはそれらの一部分のような特定の地域若しくは現場に関連するデータを含むことができる。地図データ429はまた、地球上、又は特定の地域若しくは現場内の位置を識別するための1つ以上の座標系を含むことができる。このような座標系は、緯度線及び経度線、ユニバーサル横メルカトル図法(UTM)座標系、ユニバーサル極心平射図法(UPS)座標系、グリッド方式、並びに/又は他の座標系を含むことができる。
地図データ429は、地球上の位置間の曖昧さを取り除くのに必要な関連データを含むことができる。これは、様々な国又は地域のセルラーネットワークのリストを含むことができる。これは、様々な国又は地域のラジオ放送局又はテレビ放送局のリストを含むことができる。一部の場合には、これは、様々な位置での無線ネットワークアクセスポイントについての媒体アクセス制御(MAC)アドレスのリストを含むことができる。様々な場合には、これは、既知の位置に対して誘導表面導波プローブから送出された誘導表面波の波面と北極から南極まで走る極軸、及び地球上の位置との間に形成されるであろう角度のリストも含むことができる。加えて、地図データ429は、ナビゲーションユニット400が誘導表面波を送出した誘導表面導波プローブ又はその対蹠地から所与の距離にあった場合、これらの角度が形成されるであろう位置のリストも含むことができる。
慣性データ431は、ナビゲーションユニット400の現在の軌跡又は履歴の軌跡を説明するナビゲーションデータを表す。慣性データ431は、他のナビゲーションデータと同様に、例えば、ナビゲーションユニット400又はナビゲーションユニット400が取り付けられた物体の現在の速度、現在の高度、及び/又は現在の進行方向を表すことができる。慣性データ431はまた、初期位置又は開始位置、過去の速度及びそれに対応する進行方向、過去の高度、並びに/又は他のナビゲーションデータなどの履歴のデータを含むことができる。
マルチラテレーションアプリケーション423を実行して、ナビゲーションユニット400によって受信された1つ以上の誘導表面波に基づいてナビゲーションユニット400の位置を識別する。例えば、マルチラテレーションアプリケーション423は、誘導表面波が受信された時と対蹠地からの反射が受信された時との間に発生する時間を計算することができる。計算された時間差に基づいて、マルチラテレーションアプリケーション423は、ナビゲーションユニット400が対蹠地からどれくらい離れているか、したがってナビゲーションユニット400が、誘導表面波を送出するのに使用される誘導表面導波路プローブPからどれくらい離れているかを判定することができる。マルチラテレーションアプリケーション423は、本明細書に更に記載するように、コンパスの読み取りに更に依拠して、複数の可能な位置からナビゲーションユニット400の位置の曖昧さを取り除くことができる。これらの各種実施形態の1つ以上では、マルチラテレーションアプリケーション423は、地図データ429、位相シフト曲線433、慣性データ431、及び/又は他のナビゲーションデータのような、追加のデータを使用することができる。
理解され得るように、メモリ416に記憶され、プロセッサ413によって実行可能な他のアプリケーションが存在する場合があることを理解されたい。これらの他のアプリケーションは、例えば、受信器403を用いてナビゲーションユニット400によって検出された誘導表面波の強度を判定するよう実行されてもよい。本明細書に説明する任意の構成要素がソフトウェアの形態で実装される場合、例えば、C、C++、C#、Objective C、Java(登録商標)、JavaScript(登録商標)、Perl、PHP、Visual Basic(登録商標)、Python(登録商標)、Ruby、Flash(登録商標)又は他のプログラミング言語などの多数のプログラミング言語のうちいずれか1つを採用してもよい。
多数のソフトウェア構成要素がメモリ416に記憶され、プロセッサ413によって実行可能である。これに関して、「実行可能な(executable)」という用語は、最終的にプロセッサ413によって実行され得る形態のプログラムファイルを意味している。実行可能なプログラムとは、例えば、メモリ416のランダムアクセス部分に読み込まれ、プロセッサ413で実行されることのできるフォーマットのマシンコードに翻訳されることのできるコンパイルされたプログラム、メモリ416のランダムアクセス部分に読み込まれ、プロセッサ413で実行されることのできるオブジェクトコードのような適当なフォーマットで表され得るソースコード、又はプロセッサ413によって実行されるために、メモリ416のランダムアクセス部分に命令を生成するための他の実行可能なプログラムによって解釈されうるソースコード等であってもよい。実行可能なプログラムは、例えば、ランダムアクセスメモリ(RAM)、読出し専用メモリ(ROM)、ハードドライブ、ソリッドステートドライブ、USBフラッシュドライブ、メモリカード、コンパクトディスク(CD)若しくはデジタル多用途ディスク(DVD)のような光学ディスク、フロッピーディスク、磁気テープ、又は他のメモリ構成要素を含む、メモリ416の任意の部分又は構成要素に格納されてもよい。
メモリ416は、本明細書では、揮発性及び不揮発性の両方のメモリ及びデータ記憶コンポーネントを含むように定義される。揮発性コンポーネントは、電力喪失の場合にデータ値を保持しない。不揮発性コンポーネントは、電力喪失の場合でもデータを保持する。したがって、メモリ416は、例えば、ランダムアクセスメモリ(RAM)、読出し専用メモリ(ROM)、ハードディスクドライブ、ソリッドステートドライブ、USBフラッシュドライブ、メモリカードリーダを介してアクセスされるメモリカード、関連するフロッピーディスクドライブを介してアクセスされるフロッピーディスク、光学ディスクドライブを介してアクセスされる光学ディスク、適切なテープドライブを介してアクセスされる磁気テープ、及び/若しくは他のメモリコンポーネント、又はこれらのメモリコンポーネントの任意の2つ以上の組合せを含んでもよい。加えて、RAMは、例えば、スタティックランダムアクセスメモリ(SRAM)、ダイナミックランダムアクセスメモリ(DRAM)、又は磁気ランダムアクセスメモリ(MRAM)、及び他のそのようなデバイスを含んでもよい。ROMは、例えば、プログラマブル読出し専用メモリ(PROM)、消去可能なプログラマブル読出し専用メモリ(EPROM)、電気的に消去可能なプログラマブル読出し専用メモリ(EEPROM)、又は他の同様なメモリデバイスを含んでもよい。
また、プロセッサ413は、複数のプロセッサ413及び/又は複数のプロセッサコアを表すことがあり、メモリ416は、それぞれ、並列処理回路で動作する複数のメモリ416を表すことがある。その場合は、ローカルインターフェース419は、複数のプロセッサ413のいずれか2つの間、いずれかのプロセッサ413といずれかのメモリ416との間、又はメモリ416のいずれか2つの間等の通信を容易にする適切なネットワークであってもよい。ローカルインターフェース419は、例えば、負荷の平均化の実行を含む、通信を調和させるように設計された追加的なシステムを含むことができる。プロセッサ413は、電気的又は他の利用可能な構成であってもよい。
マルチラテレーションアプリケーション423、及び本明細書で説明する他の様々なシステムは、上述のように汎用ハードウェアで実行されるソフトウェア又はコードで具現化されてもよいが、代替的に、専用ハードウェア、又はソフトウェア/汎用ハードウェア及び専用ハードウェアの組合せで具現化されてもよい。専用ハードウェアで具現化された場合は、それぞれの専用ハードウェアは、多くの技術のうちのいずれか1つ、又はそれらの組合せを採用した回路又は状態機械として実装されることができる。これらの技術は、それらに限定されないが、1つ又は複数のデータ信号を適用する際の種々の論理機能を実装する論理ゲートを有する別々の論理回路、適切な論理ゲートを有する特定用途向け集積回路(ASIC)、フィールドプログラマブルゲートアレイ(FPGA)、又は他の構成要素等を含んでもよい。このような技術は一般に、当業者には既知であるので、本明細書では詳細には説明しない。
図22に移って、マルチラテレーションアプリケーション423(図21)によるナビゲーションユニット400(図21)の位置の判定についてのグラフ表示を示す。ここで、地上局500は、それぞれの誘導表面波導波路プローブPを用いて誘導表面波を送出する。ナビゲーションユニット400は、誘導表面波を受信又は検出し、次に、それぞれの地上局500に対する対蹠地から反射された対応する反射された誘導表面波を受信又は検出する。マルチラテレーションアプリケーション423は、誘導表面波が受信された時と対応する反射された誘導表面波が受信された時との間の経過時間を計算することができる。マルチラテレーションアプリケーション423は、この時間を使用して、対蹠地からナビゲーションユニット400までの距離、及びナビゲーションユニット400からそれぞれの地上局500までの対応する距離を判定することができる。マルチラテレーションアプリケーション423は、次に、地上局500からナビゲーションユニット400までの距離に等しい半径を有する、地上局500の周りの円周503を計算することができる。同様に、マルチラテレーションアプリケーション423は、対蹠地からナビゲーションユニット400までの距離に等しい半径を有する、対蹠地の周りの円周を計算することができる。マルチラテレーションアプリケーション423は、次に、コンパスを使用して磁北又は真北の位置を判定することができる。誘導表面波の方向と磁北又は真北の位置との間の角度は、ナビゲーションユニット400の位置を地上局500に対して反対側の半球上の2つの可能な位置に切り分けることができる。一部の場合には、磁気コンパス411によって検出された伏角は、ナビゲーションユニット400の位置を単一の位置に切り分けるのに更に使用することができる。マルチラテレーションアプリケーション423は、地図データ429又は慣性データ431のような追加のデータを使用して、ナビゲーションユニット400の位置を更に切り分ける、又は、別の方法で解決する若しくは曖昧さを取り除くことができる。
図23に進んで、地上局500から送出された誘導表面波の誘導表面波面603の法線ベクトル及び地球の北極から南極まで走る極軸606によって形成された角度θの模式図を示す。角度θは、地上局500、又はナビゲーションユニット400(図21)の位置509を横断する対応する対蹠地を中心とする円の周上の2点に特有である。したがって、極軸606と誘導表面波面603の法線ベクトルとの間に形成された角度θの測定値は、それぞれが他方とは反対側の半球内にある、ナビゲーションユニット400の2つの可能な位置609を示すであろう。マルチラテレーションアプリケーション423は、追加の情報を使用して、2つの可能な位置609のうちのいずれがナビゲーションユニット400の実際の位置609に対応するかの曖昧さを取り除くことができる。
誘導表面波の周波数は、誘導表面波が地球全体の周りを均一な速度で進行するかどうかを判定することができることに留意されたい。具体的に、周波数が低くなるほど、誘導表面波面603がその周の周りに均一になる可能性が高い。しかし、より高い周波数では、局所的な地形又は水により、伝播の速度に違いが生じる場合がある。このような効果は、重要である場合には、本明細書に記載する各種実施形態において考慮されるべきである。
次に、図24を参照して、各種実施形態に係るマルチラテレーションアプリケーション423の一部分の動作の一例を提供するフローチャートを示す。本明細書で説明されるように、図24のフローチャートは、マルチラテレーションアプリケーション423の一部分の動作を実装するために採用されてもよい、多くの異なる種類の機能配置の単なる一例を提供することを理解されたい。代替として、図24のフローチャートは、1つ以上の実施形態に係るコンピューティングデバイス409(図21)に実装される方法の要素の一例を示すものとして見てもよい。
ボックス703から始めると、マルチラテレーションアプリケーション423は、ナビゲーションユニット400(図21)の位置609(図23)で受信された各誘導表面波の最初のパルス又は先端を識別する。各誘導表面波については、マルチラテレーションアプリケーション423は、各誘導表面波のパルス又は先端が、各誘導表面波に対して、ナビゲーションユニット400及び対応する地上局500(図23)の位置609で受信された時間を記録することができる。
次にボックス706を参照すると、マルチラテレーションアプリケーション423は、ナビゲーションユニット400の位置609で受信した誘導表面波の対蹠地からの反射を識別する。マルチラテレーションアプリケーション423は、反射された誘導表面波がナビゲーションユニット400の位置506で受信された時間を記録することができる。
次に、ボックス709に進んで、マルチラテレーションアプリケーション423は、本開示の各種実施形態にしたがって、ナビゲーションユニット400から地上局500又はその対応する対蹠地までの距離を計算する。例えば、マルチラテレーションアプリケーション423は、誘導表面波の最初のパルス又は先端が受信された時とそれに対応する反射誘導表面波が受信された時との間の時間の長さを計算することができる。計算された時間の長さは、ナビゲーションユニット400が地上局500及びその対蹠地からどれくらい離れているかを示している。対蹠地からの距離を判定するために、以下の式を使用することができる。
DA=(T/2)*VGSW (106)
であり、式中、DAは、ナビゲーションユニット400から対蹠地までの距離を表し、Tは誘導表面波の最初のパルス又は先端が受信された時と、それに対応する反射された誘導表面波が受信された時との間の経過時間を表し、VGSWは、損失性のテレストリアル媒体に沿った誘導表面波の速度を表す。地上局500からの距離を判定するために、以下の式を使用することができる。
DGS=(CE/2)−DA (107)
であり、式中、DGSはナビゲーションユニット400から地上局500までの距離を表し、CEは地球の円周を表し、DAはナビゲーションユニット400から対蹠地までの距離を表す。上記の式からわかるように、誘導表面波が最初に検出される時と、それに対応する反射が検出される時との間の時間の長さが短くなるほど、ナビゲーションユニット400は、地上局500の対蹠地により近くなる。誘導表面波が最初に検出される時と、それに対応する反射が検出される時との間の時間の長さが長くなるほど、ナビゲーションユニット400は地上局500自身により近くなる。
DA=(T/2)*VGSW (106)
であり、式中、DAは、ナビゲーションユニット400から対蹠地までの距離を表し、Tは誘導表面波の最初のパルス又は先端が受信された時と、それに対応する反射された誘導表面波が受信された時との間の経過時間を表し、VGSWは、損失性のテレストリアル媒体に沿った誘導表面波の速度を表す。地上局500からの距離を判定するために、以下の式を使用することができる。
DGS=(CE/2)−DA (107)
であり、式中、DGSはナビゲーションユニット400から地上局500までの距離を表し、CEは地球の円周を表し、DAはナビゲーションユニット400から対蹠地までの距離を表す。上記の式からわかるように、誘導表面波が最初に検出される時と、それに対応する反射が検出される時との間の時間の長さが短くなるほど、ナビゲーションユニット400は、地上局500の対蹠地により近くなる。誘導表面波が最初に検出される時と、それに対応する反射が検出される時との間の時間の長さが長くなるほど、ナビゲーションユニット400は地上局500自身により近くなる。
ボックス713に移って、マルチラテレーションアプリケーション423は、ナビゲーションユニット400の位置506(図22)を識別するために、地上局500又はその対蹠地の周りの円周503(図22)を計算、プロット、又は別の方法で生成する。円周は、上述したように、例えば、地上局500又は対応する対蹠地の位置と等価の中心を有すると共に、地上局500又は対蹠地の位置までの計算された距離に等しい半径を有する円を作成することによって計算することができる。地上局500及び対応する対蹠地の位置は既知で、地図データ429(図21)のようなナビゲーションデバイス400のメモリ416に記憶されてもよいし、様々な手法を用いて判定されてもよい。
ボックス716に移って、マルチラテレーションアプリケーション423は、地球の極軸606と誘導表面波面603(図23)又はボックス713で前もって計算された円周503との間に形成された角度θを識別する。例えば、マルチラテレーションアプリケーション423は、実施形態に応じて、コンパス411(図21)に磁北極又は真北極の位置を判定させることができる。誘導表面波面603(図23)又は円周503に対する磁北極又は真北極の位置を使用して、θの値を計算する。
次にボックス719に進んで、マルチラテレーションアプリケーション423は、ナビゲーションユニット400の可能性のある位置609(図23)を判定する。例えば、マルチラテレーションアプリケーション423は、地図データ429を参照して、角度θが地上局500又はその対蹠地からの計算された距離に形成されるであろう可能性のある位置を識別することができる。
ボックス723に移って、マルチラテレーションアプリケーション423は、ナビゲーションユニットの可能性のある位置609の曖昧さを取り除いて、ナビゲーションユニットの現在位置609を判定する。以下で提供する例を含む様々な手法を使用して、複数の位置間の曖昧さを取り除くことができる。いくつかの実施形態では、曖昧さ除去プロセスの精度を向上させるために、又は、最初の手法が可能性のある位置609間の曖昧さを取り除くために実行できない場合のバックアップ手法として、複数の手法を一緒に使用してもよい。
例えば、マルチラテレーションアプリケーション423は、慣性データ431を使用して、複数の位置の間の曖昧さを取り除くことができる。例えば、慣性データ431が、ナビゲーションユニット400がニューヨーク市で現在の旅を開始し時速500マイルで進行し、1時間進行したと示した場合、マルチラテレーションアプリケーション423は、ナビゲーションユニットが、半径500マイルを有し、ニューヨーク市を中心とする円の周上に位置することを認識するであろう。その周にあるボックス719で識別されたどの位置609も、ナビゲーションユニット400の現在の位置609に対応するであろう。同様に、ボックス719で判定された一つの位置が北アメリカに位置し、ボックス719で判定された他の位置がアジアに位置する場合、マルチラテレーションアプリケーション423は、北アメリカの位置をナビゲーションユニット400の現在位置609として識別することができる。
別の例としては、マルチラテレーションアプリケーション423は、外部データソースを使用して、複数の位置の間の曖昧さを取り除くことができる。例として、ボックス719で判定された一つの位置が北アメリカ内に位置することがあり、ボックス719で判定された他の位置がアジアに位置することがある。ナビゲーションユニット400が北アメリカのセルラーフォン提供業者から信号を受信できた場合、マルチラテレーションアプリケーション423は、ボックス719で識別された北アメリカの位置がナビゲーションユニット400の正確な現在位置506であったことを判定することができる。同様の判定は、ナビゲーションユニット400が特定の無線局(例えば、北アメリカに位置するAM又はFM無線局対アジアに位置するAM又はFM無線局)、テレビ局、無線ネットワーク信号(例えば、北アメリカに位置すると前もって識別されたMACアドレスを有するネットワークアクセスポイントからの)又は同様の信号の放送を受信していたかどうかに基づいて行ってもよい。
一部の例では、マルチラテレーションアプリケーション423は、伏角を使用することによって潜在的な位置609間の曖昧さを取り除くことができる。伏角は、地球の磁力線と水平線との間の角度を指す。地球の磁力線は地球の表面に平行ではないので、磁針が地球の磁力線自身に整合しようと、コンパスの針の北端は北半球の地表に向かって指し示し(正の伏角)、南半球の地表から離れて指し示す(負の伏角)であろう。ボックス719で識別された1つの可能性のある位置609が北半球に配置され、ボックス719で識別された他の可能性のある位置609が南半球に配置される場合、マルチラテレーションアプリケーション423は、ナビゲーションユニット400の現在位置609で測定された伏角を使用して、可能性のある位置609間の曖昧さを取り除くことができる。
ナビゲーションユニット400の現在位置506の曖昧さを取り除いた後、処理はその後、終了する。
図24のフローチャートは、マルチラテレーションアプリケーション423の一部分の実装形態の機能及び動作を示す。ソフトウェアで具現化された場合、各ブロックは、モジュール、セグメント、又は特定の論理機能(単数又は複数)を実装するためのプログラム命令を含むコードの部分を表していてもよい。プログラム命令は、プログラミング言語で書かれた人間が読み取り可能な命令文を含むソースコード、又はコンピュータシステム若しくは他のシステム内のプロセッサ413(図21)のような好適な実行システムによって認識可能な数値的な命令を含むマシンコードの形態で具現化してもよい。マシンコードは、ソースコードなどから変換されてもよい。ハードウェアで具現化された場合、各ブロックは、特定の論理機能(単数又は複数)を実装するための回路、又は多数の相互接続された回路を表してもよい。
図24のフローチャートが実行の具体的な順番を示しているが、実行の順番は示された順番と異なってもよいことを理解されたい。例えば、2つ以上のブロックの実行の順番が示された順番に対して入れ替えられてもよい。また、図24に連続して示された2つ以上のブロックが同時又は部分的に同時に実行されてもよい。更に、いくつかの実施形態では、図24に示されたブロックのうちの1つ以上が飛ばされる又は省略されてもよい。加えて、利用性の向上、計算、性能の測定、又はトラブルシューティングの援助の提供等の目的で、任意の数のカウンタ、状態変数、警告信号、又はメッセージが、本明細書で説明される論理フローに追加されてもよい。そのようなすべての変形は、本開示の範囲内であることを理解されたい。
また、マルチラテレーションアプリケーション423を含む、ソフトウェア又はコードを有する、本明細書で説明された任意の論理又はアプリケーションは、例えばコンピュータシステム又はその他のシステムのプロセッサ413のような命令実行システムによって、又はそれに関連して使用される、任意の非一時的なコンピュータ可読媒体で具現化され得る。この意味で、論理は、例えば、コンピュータ可読媒体からフェッチされ、命令実行システムによって実行され得る命令及び宣言を含む命令文を含んでもよい。本開示の文脈において、「コンピュータ可読媒体」は、命令実行システムによって、又はそれに関連して使用される、本明細書で説明される論理又はアプリケーションを含み、格納し、又は保持することが可能な任意の媒体とすることができる。
コンピュータ可読媒体は、例えば、磁気的、光学的、又は半導体の媒体などの、多くの物理媒体のうちのいずれか1つを含むことができる。好適なコンピュータ可読媒体のより具体的な例は、それらに限定されないが、磁気テープ、磁気フロッピーディスケット、磁気ハードドライブ、メモリカード、ソリッドステートドライブ、USBフラッシュドライブ、又は光学ディスクを含むであろう。また、コンピュータ可読媒体は、例えば、スタティックランダムアクセスメモリ(SRAM)及びダイナミックランダムアクセスメモリ(DRAM)を含むランダムアクセスメモリ(RAM)、又は、磁気ランダムアクセスメモリ(MRAM)であってもよい。加えて、コンピュータ可読媒体は、読出し専用メモリ(ROM)、プログラマブル読出し専用メモリ(PROM)、消去可能なプログラマブル読出し専用メモリ(EPROM)、電気的に消去可能なプログラマブル読出し専用メモリ(EEPROM)、又は他の種類のメモリデバイスであってもよい。
更に、マルチラテレーションアプリケーション423を含む、本明細書で説明される任意の論理又はアプリケーションは、種々の方法で実装され、また構成されてもよい。例えば、説明された1つ以上のアプリケーションは、単一のアプリケーションのモジュール又はコンポーネントとして実装されてもよい。加えて、「アプリケーション」、「サービス」、「システム」、「エンジン」、「モジュール」などのような用語は交換可能であり、限定することを意図していないことを理解されたい。
特段の断りがない限り、「X、Y、又はZのうちの少なくとも1つ」という言い回しのような独特の文言は、アイテム、用語等が、X、Y、若しくはZのいずれか、又はそれら(例えば、X、Y、及び/又はZ)の任意の組合せであってもよいということを表すために一般に使用される文脈と理解されたい。したがって、このような独特の文言は、特定の実施形態が、少なくとも1つのX、少なくとも1つのY、又は少なくとも1つのZが存在する必要があることを暗示することを一般に意図せず、また、すべきでない。
本開示の例示的な実施形態は、以下の条項で提供される。これらの条項は、本開示の各種実施形態のいくつかの例を提供する。しかし、これらの条項で提供される説明は、代替の実装形態又は実施形態を除外するものではない。むしろ、これらの条項は、本開示の潜在的な実施形態の説明を提供することを意図している。
条項1.損失性導電媒体の上に持ち上げられた帯電端子と、帯電端子と損失性導電媒体との間を結合された受信器ネットワークであって、帯電端子の近傍にある損失性導電媒体の特性に少なくとも部分的に基づくウェーブチルト角(Ψ)であって誘導表面波に関連付けられたウェーブチルト角(Ψ)と合致する位相遅延(Φ)を有する、受信器ネットワークと、コンパスと、プロセッサと、メモリと、メモリに記憶され、プロセッサによって実行可能なアプリケーションと、を備え、アプリケーションは、プロセッサに実行されると、少なくとも、誘導表面波受信構造を用いて誘導表面波を受信することと、誘導表面波受信構造を用いて誘導表面波の反射を受信することと、誘導表面波の受信と誘導表面波の反射の受信との間の経過時間を計算することと、誘導表面波の波面と地球の極軸との間の角度を測定することと、誘導表面波の波面と地球の極軸との間の角度及び誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づいて誘導表面波受信構造の位置を判定することと、のアクションをシステムに実行させる、システム。
条項2.アプリケーションは、プロセッサによって実行されるとき、システムに、少なくとも、誘導表面波受信構造の位置での伏角の値を更に測定させ、誘導表面波受信構造の位置を判定させることは、伏角の値に更に少なくとも部分的に基づくものである、条項1に記載のシステム。
条項3.アプリケーションは、プロセッサによって実行されるとき、システムに、誘導表面波受信構造の範囲内の無線伝送タワーの識別情報に少なくとも部分的に基づいて、少なくとも、誘導表面波受信構造の大体の位置を更に識別させ、システムに誘導表面波受信構造の位置を判定させることは、誘導表面波受信構造の大体の位置に更に少なくとも部分的に基づくものである、条項1又は2に記載のシステム。
条項4.アプリケーションは、プロセッサによって実行されるとき、システムに、誘導表面波受信構造の範囲内のセルラーネットワークタワーの識別情報に少なくとも部分的に基づいて、少なくとも、誘導表面波受信構造の大体の位置を更に識別させ、システムに誘導表面波受信構造の位置を判定させることは、誘導表面波受信構造の大体の位置に更に少なくとも部分的に基づくものである、条項1又は2に記載のシステム。
条項5.アプリケーションは、プロセッサによって実行されるとき、システムに、システムのメモリに記憶され、かつシステムに関連付けられた慣性データに少なくとも部分的に基づいて、少なくとも、システムの大体の位置を更に識別させ、システムに誘導表面波受信構造の位置を判定させることは、システムの大体の位置に更に少なくとも部分的に基づくものである、条項1又は2に記載のシステム。
条項6.システムにシステムの位置を決定させることが誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づくものであることは、プロセッサに、少なくとも、時間を二分割させ、半分の時間を生成させることと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と受信器ネットワークとの間の距離を生成させることと、対蹠地と誘導表面波受信構造との間の距離を地球の円周の半分に等しい値から引いて、誘導表面波に関連付けられたプローブと受信器ネットワークとの間の距離を生成させることと、システムの位置を、プローブを中心とする、プローブとシステムとの間の距離に等しい半径を有する円の周に沿って設定させることと、を更に含む、条項1に記載のシステム。
条項7.システムにシステムの位置を決定させることが誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づくものであることは、プロセッサに少なくとも、時間を二分割させ、半分の時間を生成させることと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と受信器ネットワークとの間の距離を生成させることと、システムの位置を、対蹠地を中心とする、対蹠地とシステムとの間の距離に等しい半径を有する円の周に沿って設定させることと、を更に含む、条項1に記載のシステム。
条項8.誘導表面波受信構造を用いて誘導表面波を受信することと、誘導表面波受信構造を用いて誘導表面波の反射を受信することと、誘導表面波の受信と誘導表面波の反射の受信との間の経過時間を計算することと、誘導表面波の波面と地球の極軸との間の角度を測定することと、誘導表面波の波面と地球の極軸との間の角度及び誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づいて、誘導表面波受信構造の位置を判定することと、を含む、方法。
条項9.誘導表面波受信構造の位置での伏角の値を測定することを更に含み、誘導表面波受信構造の位置の判定は、伏角の値に更に少なくとも部分的に基づくものである、条項8に記載の方法。
条項10.誘導表面波受信構造の範囲内のセルラーネットワークタワーの識別情報に少なくとも部分的に基づいて誘導表面波受信構造の大体の位置を識別することを更に含み、誘導表面波受信構造の位置を判定することは、誘導表面波受信構造の大体の位置に更に少なくとも部分的に基づくものである、条項8又は9に記載の方法。
条項11.誘導表面波受信構造の範囲内の無線送信タワーの識別情報に少なくとも部分的に基づいて誘導表面波受信構造の大体の位置を識別することを更に含み、誘導表面波受信構造の位置を判定することは、誘導表面波受信構造の第他の位置に更に少なくとも部分的に基づくものである、条項8又は9に記載の方法。
条項12.誘導表面波受信構造に関連付けられた慣性データに少なくとも部分的に基づいて誘導表面波受信構造の大体の位置を識別することを更に含み、誘導表面波受信構造の位置を判定することは、誘導表面波受信構造の大体の位置に更に少なくとも部分的に基づくものである、条項8又は9に記載の方法。
条項13.誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づいて誘導表面波受信構造の位置を判定することは、時間を二分割し、半分の時間を生成することと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と誘導表面波受信構造との間の距離を生成することと、対蹠地と誘導表面波受信構造との間の距離を地球の円周の半分に等しい値から引いて、誘導表面波に関連付けられたプローブと誘導表面波受信構造との間の距離を生成することと、誘導表面波受信構造の位置を、プローブを中心とする、プローブと誘導表面波受信構造との間の距離に等しい半径を有する円の周に沿って設定することと、を更に含む、条項8に記載の方法。
条項14.誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づいて誘導表面波受信構造の位置を判定することは、時間を二分割し、半分の時間を生成することと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と誘導表面波受信構造との間の距離を生成することと、誘導表面波受信構造の位置を、対蹠地を中心とする、対蹠地と誘導表面波受信構造との間の距離に等しい半径を有する円の周に沿って設定することと、を更に含む、条項8に記載の方法。
条項15.誘導表面波受信構造は、損失性導電媒体の上に持ち上げられた帯電端子と、帯電端子と損失性導電媒体との間を結合された受信器ネットワークであって、帯電端子の近傍にある損失性導電媒体の特性に少なくとも部分的に基づくウェーブチルト角(Ψ)であって誘導表面波に関連付けられたウェーブチルト角(Ψ)と合致する位相遅延(Φ)を有する、受信器ネットワークと、を含む、条項8〜14のいずれか一項に記載の方法。
条項16.テレストリアル媒体に沿って進行する誘導表面波から電気的エネルギを得るように構成された誘導表面波受信構造と、プロセッサと、メモリと、コンパスと、メモリに記憶され、プロセッサによって実行されるとき、装置に、少なくとも、誘導表面波受信構造を用いて誘導表面波を受信させ、誘導表面波受信構造を用いて誘導表面波の反射を受信させ、誘導表面波の受信と誘導表面波の反射の受信との間の経過時間を計算させ、誘導表面波の波面と地球の極軸との間の角度を測定させ、誘導表面波の波面と地球の極軸との間の角度及び誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づいて誘導表面波受信構造の位置を判定させる、アプリケーションと、を備える、装置。
条項17.アプリケーションは、プロセッサによって実行されるとき、装置に、少なくとも、誘導表面波受信構造の位置での伏角の値を測定させ、誘導表面波受信構造の位置を判定することは、伏角の値に更に少なくとも部分的に基づくものである、条項16に記載の装置。
条項18.装置に装置の位置を判定させることが誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づくものであることは、プロセッサに少なくとも、時間を二分割させ、半分の時間を生成させることと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と誘導表面波受信構造との間の距離を生成させることと、装置の位置を、対蹠地を中心とする、対蹠地と装置との間の距離に等しい半径を有する円の周に沿って設定させることと、を更に含む、条項16又は17に記載の装置。
条項19.装置に装置の位置を判定させることが、誘導表面波の受信と誘導表面波の反射の受信との間の経過時間に少なくとも部分的に基づくものであることは、プロセッサに、少なくとも、時間を二分割させ、半分の時間を生成させることと、半分の時間に誘導表面波の速度を掛けて、誘導表面波に関連付けられたプローブの対蹠地と誘導表面波受信構造との間の距離を生成させることと、対蹠地と誘導表面波受信構造との間の距離を地球の円周の半分に等しい値から引いて、誘導表面波に関連付けられたプローブと装置との間の距離を生成させることと、誘導表面波受信構造の位置を、プローブを中心とする、プローブと装置との間の距離に等しい半径を有する円の周に沿って設定させると、を更に含む、条項16〜18のいずれか一項に記載の装置。
条項20.アプリケーションは、プロセッサによって実行されるとき、装置に、少なくとも、誘導表面波受信構造の範囲内のセルラーネットワークタワーの識別情報に少なくとも部分的に基づいて誘導表面波受信構造の大体の位置を更に識別させ、装置に誘導表面波受信構造の位置を判定させることは更に、誘導表面波受信構造の大体の位置に少なくとも部分的に基づくものである、条項16〜19のいずれか一項に記載の装置。
条項21.アプリケーションは、プロセッサによって実行されるとき、装置に、少なくとも、システムのメモリに記憶され、かつ誘導表面波受信構造に関連付けられた慣性データに少なくとも部分的に基づいて誘導表面波受信構造の大体の位置を更に識別させ、装置に誘導表面波受信構造の位置を判定させることは、誘導表面波受信構造の大体の位置に更に少なくとも部分的に基づくものである、条項16〜21のいずれか一項に記載の装置。
上述した本開示の実施形態は、本開示の原理の明瞭な理解のために説明した実装形態の可能な例に過ぎないことを強調しなければならない。上述した実施形態(単数又は複数)に対して、本開示の趣旨及び原理から実質的に逸脱することなく、多くの変形及び改良を行なうことができる。そのような改良及び変形のすべては、本開示の範囲内として本明細書に含まれ、以下の特許請求の範囲によって保護されることを意図している。加えて、説明した実施形態の任意選択のかつ好ましい特徴及び改良のすべて、並びに従属請求項は、本明細書で教示した本開示のすべての態様に利用可能である。更に、従属請求項の個別の特徴、並びに説明した実施形態の任意選択のかつ好ましい特徴及び改良のすべては、互いに組合せ可能かつ交換可能である。そのため、上述した各種実施形態は、所望の実装形態に応じて種々の方法で任意選択的に組合せることができる要素を開示している。
Claims (15)
- 損失性導電媒体の上に持ち上げられた帯電端子と、
前記帯電端子と前記損失性導電媒体との間を結合された受信器ネットワークであって、前記帯電端子の近傍にある前記損失性導電媒体の特性に少なくとも部分的に基づくウェーブチルト角(Ψ)であって誘導表面波に関連付けられたウェーブチルト角(Ψ)と合致する位相遅延(Φ)を有する、受信器ネットワークと、
コンパスと、
プロセッサと、
メモリと、
前記メモリに記憶され、前記プロセッサによって実行可能なアプリケーションであって、前記プロセッサによって実行されるとき、システムに、少なくとも、
誘導表面波受信構造を用いて誘導表面波を受信することと、
前記誘導表面波受信構造を用いて前記誘導表面波の反射を受信することと、
前記誘導表面波の受信と前記誘導表面波の反射の受信との間の経過時間を計算することと、
前記誘導表面波の波面と地球の極軸との間の角度を測定することと、
前記誘導表面波の前記波面と地球の極軸との間の前記角度及び
前記誘導表面波の受信と前記誘導表面波の反射の受信との間の前記経過時間に少なくとも部分的に基づいて前記誘導表面波受信構造の位置を判定することと、のアクションを実行させるアプリケーションと、を備える、システム。 - 前記アプリケーションは、前記プロセッサによって実行されるとき、前記システムに、前記誘導表面波受信構造の位置での伏角の値を少なくとも更に測定させ、
前記システムに前記誘導表面波受信構造の前記位置を判定させることは、前記伏角の前記値に更に少なくとも部分的に基づくものである、請求項1に記載のシステム。 - 前記アプリケーションは、前記プロセッサによって実行されるとき、前記システムに、前記誘導表面波受信構造の範囲内の無線伝送タワーの識別情報に少なくとも部分的に基づいて、少なくとも、前記誘導表面波受信構造の大体の位置を更に識別させ、
前記システムに前記誘導表面波受信構造の前記位置を判定させることは、前記誘導表面波受信構造の前記大体の位置に更に少なくとも部分的に基づくものである、請求項1又は2に記載のシステム。 - 前記アプリケーションは、前記プロセッサによって実行されるとき、前記システムに、前記誘導表面波受信構造の範囲内のセルラーネットワークタワーの識別情報に少なくとも部分的に基づいて、少なくとも、前記誘導表面波受信構造の大体の位置を更に識別させ、
前記システムに前記誘導表面波受信構造の前記位置を判定させることは、前記誘導表面波受信構造の前記大体の位置に更に少なくとも部分的に基づくものである、請求項1又は2に記載のシステム。 - 前記アプリケーションは、前記プロセッサによって実行されるとき、少なくとも、前記システムに、前記システムのメモリに記憶され、かつ前記システムに関連付けられた慣性データに少なくとも部分的に基づいて、前記システムの大体の位置を更に識別させ、
前記システムに前記誘導表面波受信構造の前記位置を判定させることは、前記システムの前記大体の位置に更に少なくとも部分的に基づくものである、請求項1又は2に記載のシステム。 - 前記システムに前記システムの位置を判定させることが前記誘導表面波の受信と前記誘導表面波の反射の受信との間の前記経過時間に少なくとも部分的に基づくものであることは、前記プロセッサに、少なくとも、
前記時間を二分割させ、半分の時間を生成させることと、
前記半分の時間に前記誘導表面波の速度を掛けて、前記誘導表面波に関連付けられたプローブの対蹠地と前記受信器ネットワークとの間の距離を生成させることと、
前記対蹠地と前記誘導表面波受信構造との間の前記距離を地球の円周の半分に等しい値から引いて、前記誘導表面波に関連付けられた前記プローブと前記受信器ネットワークとの間の距離を生成させることと、
前記システムの前記位置を、前記プローブを中心とする、前記プローブと前記システムとの間の前記距離に等しい半径を有する円の周に沿って設定させることと、を更に含む、請求項1に記載のシステム。 - 前記システムに前記システムの位置を判定させることが前記誘導表面波の受信と前記誘導表面波の反射の受信との間の前記経過時間に少なくとも部分的に基づくものであることは、前記プロセッサに、少なくとも、
前記時間を二分割させ、半分の時間を生成させることと、
前記半分の時間に前記誘導表面波の速度を掛けて、前記誘導表面波に関連付けられたプローブの対蹠地と前記受信器ネットワークとの間の距離を生成させることと、
前記システムの前記位置を、前記対蹠地を中心とする、前記対蹠地と前記システムとの間の前記距離に等しい半径を有する円の周に沿って設定させることと、を更に含む、請求項1に記載のシステム。 - 誘導表面波受信構造を用いて誘導表面波を受信することと、
前記誘導表面波受信構造を用いて前記誘導表面波の反射を受信することと、
前記誘導表面波の受信と前記誘導表面波の反射の受信との間の経過時間を計算することと、
前記誘導表面波の波面と地球の極軸との間の角度を測定することと、
前記誘導表面波の前記波面と地球の前記極軸との間の前記角度及び
前記誘導表面波の受信と前記誘導表面波の反射の受信との間の前記経過時間に少なくとも部分的に基づいて前記誘導表面波受信構造の位置を判定することと、を含む、方法。 - 前記誘導表面波受信構造の前記位置での伏角の値を測定することを更に含み、
前記誘導表面波受信構造の前記位置を判定することは、前記伏角の前記値に更に少なくとも部分的に基づくものである、請求項8に記載の方法。 - 前記誘導表面波受信構造の範囲内のセルラーネットワークタワーの識別情報に少なくとも部分的に基づいて、前記誘導表面波受信構造の大体の位置を識別することを更に含み、
前記誘導表面波受信構造の前記位置を判定することは、前記誘導表面波受信構造の前記大体の位置に更に少なくとも部分的に基づくものである、請求項8又は9に記載の方法。 - 前記誘導表面波受信構造の範囲内の無線伝送タワーの識別情報に少なくとも部分的に基づいて、前記誘導表面波受信構造の大体の位置を識別することを更に含み、
前記誘導表面波受信構造の前記位置を判定することは、前記誘導表面波受信構造の前記大体の位置に更に少なくとも部分的に基づくものである、請求項8に記載の方法。 - 前記受信誘導表面波受信構造に関連付けられた慣性データに少なくとも部分的に基づいて、前記誘導表面波受信構造の大体の位置を識別することを更に含み、
前記誘導表面波受信構造の前記位置を判定することは、前記誘導表面波受信構造の前記大体の位置に更に少なくとも部分的に基づくものである、請求項8又は9に記載の方法。 - 前記誘導表面波の受信と前記誘導表面波の反射の受信との間の前記経過時間に少なくとも部分的に基づいて前記誘導表面波受信構造の前記位置を判定することは、
前記時間を二分割し、半分の時間を生成することと、
前記半分の時間に前記誘導表面波の速度を掛けて、前記誘導表面波に関連付けられたプローブの対蹠地と前記誘導表面波受信構造との間の距離を生成することと、
前記対蹠地と前記誘導表面波受信構造との間の前記距離を地球の円周の半分に等しい値から引いて、前記誘導表面波に関連付けられた前記プローブと前記誘導表面波受信構造との間の距離を生成することと、
前記誘導表面波受信構造の前記位置を、前記プローブを中心とする、前記プローブと前記誘導表面波受信構造との間の前記距離に等しい半径を有する円の周に沿って設定することと、を更に含む、請求項8に記載の方法。 - 前記誘導表面波の受信と前記誘導表面波の反射の受信との間の前記経過時間に少なくとも部分的に基づいて前記誘導表面波受信構造の位置を判定することは、
前記時間を二分割し、半分の時間を生成することと、
前記半分の時間に前記誘導表面波の速度を掛けて、前記誘導表面波に関連付けられたプローブの対蹠地と前記誘導表面波受信構造との間の距離を生成することと、
前記誘導表面波受信構造の前記位置を、前記対蹠地を中心とする、前記対蹠地と前記誘導表面波受信構造との間の前記距離に等しい半径を有する円の周に沿って設定することと、を更に含む、請求項8に記載の方法。 - 前記誘導表面波受信構造は、
損失性導電媒体の上に持ち上げられた帯電端子と、
前記帯電端子と前記損失性導電媒体との間を結合された受信器ネットワークであって、前記帯電端子の近傍にある前記損失性導電媒体の特性に少なくとも部分的に基づくウェーブチルト角(Ψ)であって前記誘導表面波に関連付けられたウェーブチルト角(Ψ)と合致する位相遅延(Φ)を有する、受信器ネットワークと、を含む、請求項8〜14のいずれか一項に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/850,056 US10408916B2 (en) | 2015-09-10 | 2015-09-10 | Geolocation using guided surface waves |
| US14/850,056 | 2015-09-10 | ||
| PCT/US2016/047956 WO2017044296A1 (en) | 2015-09-10 | 2016-08-22 | Geolocation with guided surface waves |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018526653A true JP2018526653A (ja) | 2018-09-13 |
| JP2018526653A5 JP2018526653A5 (ja) | 2019-09-12 |
Family
ID=56853842
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018513320A Pending JP2018526653A (ja) | 2015-09-10 | 2016-08-22 | 誘導表面波を用いた地理的位置 |
Country Status (16)
| Country | Link |
|---|---|
| US (1) | US10408916B2 (ja) |
| EP (1) | EP3341684B1 (ja) |
| JP (1) | JP2018526653A (ja) |
| KR (1) | KR20180052684A (ja) |
| CN (1) | CN108351211A (ja) |
| AU (1) | AU2016320717B2 (ja) |
| BR (1) | BR112018004915A2 (ja) |
| CA (1) | CA2997753A1 (ja) |
| EA (1) | EA201890693A1 (ja) |
| HK (1) | HK1254455A1 (ja) |
| IL (1) | IL257943A (ja) |
| MX (1) | MX2018002873A (ja) |
| PH (1) | PH12018500526A1 (ja) |
| TW (1) | TW201721178A (ja) |
| WO (1) | WO2017044296A1 (ja) |
| ZA (1) | ZA201802276B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018530753A (ja) * | 2015-09-10 | 2018-10-18 | シーピージー テクノロジーズ、 エルエルシーCpg Technologies, Llc | 誘導表面波を用いた地理的位置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2997620A1 (en) * | 2015-09-10 | 2017-03-16 | Cpg Technologies, Llc. | Geolocation using guided surface waves |
| US11448677B2 (en) * | 2020-02-20 | 2022-09-20 | Cpg Technologies, Llc | System and method for measuring fields over distance |
Family Cites Families (181)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3123767A (en) | 1964-03-03 | Uator | ||
| US645576A (en) | 1897-09-02 | 1900-03-20 | Nikola Tesla | System of transmission of electrical energy. |
| US685955A (en) | 1899-06-24 | 1901-11-05 | Nikola Tesla | Apparatus for utilizing effects transmitted from a distance to a receiving device through natural media. |
| US685953A (en) | 1899-06-24 | 1901-11-05 | Nikola Tesla | Method of intensifying and utilizing effects transmitted through natural media. |
| US685956A (en) | 1899-08-01 | 1901-11-05 | Nikola Tesla | Apparatus for utilizing effects transmitted through natural media. |
| US685954A (en) | 1899-08-01 | 1901-11-05 | Nikola Tesla | Method of utilizing effects transmitted through natural media. |
| US685012A (en) | 1900-03-21 | 1901-10-22 | Nikola Tesla | Means for increasing the intensity of electrical oscillations. |
| US787412A (en) | 1900-05-16 | 1905-04-18 | Nikola Tesla | Art of transmitting electrical energy through the natural mediums. |
| US725605A (en) | 1900-07-16 | 1903-04-14 | Nikola Tesla | System of signaling. |
| GB190508200A (en) | 1905-04-17 | 1906-04-17 | Nikola Tesla | Improvements relating to the Transmission of Electrical Energy. |
| US851336A (en) | 1905-06-27 | 1907-04-23 | Georg Von Arco | Transmitter for wireless telegraphy. |
| US1119732A (en) | 1907-05-04 | 1914-12-01 | Nikola Tesla | Apparatus for transmitting electrical energy. |
| GB191220981A (en) | 1912-09-14 | 1913-05-22 | Arthur Reed | A New or Improved Folding or Collapsible Lifeboat. |
| GB191414579A (en) | 1913-10-28 | 1914-10-22 | Antonio Scato | Improvements in and relating to Devices for Supporting the Hands of Pianoforte Players. |
| GB191324421A (en) | 1913-10-28 | 1914-04-02 | Frank Billings | Loading and Conveying Machines. |
| GB191508200A (en) | 1914-06-13 | 1916-09-21 | Joseph Ricchini | An Improved Bearer or Support for Scaffolding and the like. |
| GB191511293A (en) | 1915-08-04 | 1916-06-22 | Frederick Lamplough | Improvements in or relating to Internal-combustion Engines. |
| GB191513563A (en) | 1915-09-23 | 1916-05-18 | Harald Borgen | Improvements in the Method of and Apparatus for Making Margarine. |
| US1452849A (en) | 1921-12-13 | 1923-04-24 | Rca Corp | Wireless transmitting station |
| US1691338A (en) | 1923-10-05 | 1928-11-13 | Westinghouse Electric & Mfg Co | Aerial system |
| US1652516A (en) | 1924-12-23 | 1927-12-13 | Westinghouse Electric & Mfg Co | Radio transmitting system |
| US1947256A (en) | 1930-01-11 | 1934-02-13 | Bell Telephone Labor Inc | Antenna counterpoise system |
| BE554252A (ja) | 1950-03-21 | |||
| US2921277A (en) | 1956-07-13 | 1960-01-12 | Surface Conduction Inc | Launching and receiving of surface waves |
| US3219954A (en) | 1957-05-31 | 1965-11-23 | Giovanni P Rutelli | Surface wave transmission system for telecommunication and power transmission |
| FR1604503A (ja) | 1960-05-31 | 1971-11-29 | ||
| US3582838A (en) | 1966-09-27 | 1971-06-01 | Zenith Radio Corp | Surface wave devices |
| US3445844A (en) | 1968-01-11 | 1969-05-20 | Raytheon Co | Trapped electromagnetic radiation communications system |
| US3742511A (en) | 1971-06-15 | 1973-06-26 | Smith Electronics Inc | Low-loss antenna system with counterpoise insulated from earth |
| US3742509A (en) | 1971-11-11 | 1973-06-26 | Raytheon Co | Subsurface traveling wave antenna |
| US3706046A (en) | 1971-12-13 | 1972-12-12 | Bell Telephone Labor Inc | Phase-locked signal source |
| GB1471860A (en) | 1974-07-02 | 1977-04-27 | Plessey Co Ltd | Radio antenna incorporating low-loss high relative permittivity dielectric material |
| US4751515A (en) | 1980-07-09 | 1988-06-14 | Corum James F | Electromagnetic structure and method |
| US4665404A (en) | 1983-10-24 | 1987-05-12 | Offshore Navigation, Inc. | High frequency spread spectrum positioning system and method therefor |
| US4808950A (en) | 1986-10-06 | 1989-02-28 | Sanders Associates, Inc. | Electromagnetic dispersive delay line |
| GB8802204D0 (en) | 1988-02-02 | 1988-03-02 | Hately M C | Twin feeder crossed field antenna systems |
| US5197039A (en) * | 1988-03-29 | 1993-03-23 | Shell Oil Company | Methods for processing seismic data |
| IL89468A (en) | 1989-03-03 | 1994-08-26 | Gamzon Eliyahu | Method and system for supporting an airborne vehicle in space |
| US5107261A (en) * | 1990-02-23 | 1992-04-21 | Viz Manufacturing Company | Passive ranging system for radiosondes |
| US5173690A (en) * | 1990-02-23 | 1992-12-22 | Viz Manufacturing Company | Passive ranging system utilizing range tone signals |
| JP3145385B2 (ja) * | 1990-06-12 | 2001-03-12 | セイコーインスツルメンツ株式会社 | ワイヤレス座標読取装置およびその座標指示器並びにその座標指示器のスイッチ状態検出方法 |
| US5045825A (en) | 1990-07-05 | 1991-09-03 | Hewlett-Packard Company | Coupling port for multiple capacitor, distributed inductor resonator |
| US5293308A (en) | 1991-03-26 | 1994-03-08 | Auckland Uniservices Limited | Inductive power distribution system |
| US5301096A (en) | 1991-09-27 | 1994-04-05 | Electric Power Research Institute | Submersible contactless power delivery system |
| ATE135836T1 (de) | 1992-01-03 | 1996-04-15 | Siemens Ag | Passiver oberflächenwellen-sensor, der drahtlos abfragbar ist |
| EP0639301B1 (en) | 1992-05-08 | 1997-09-03 | Uniline Limited | Method and apparatus for single line transmission of electrical power |
| US6075498A (en) | 1993-01-08 | 2000-06-13 | American Nucleonics Corp. | Surface wave directional detection system and method |
| JPH06225481A (ja) | 1993-01-21 | 1994-08-12 | Takeo Oe | 水中電気機器用の無線方式電力供給装置 |
| US5708971A (en) * | 1994-01-11 | 1998-01-13 | Ericsson Inc. | Two-way paging system and apparatus |
| WO1995029516A1 (en) | 1994-04-26 | 1995-11-02 | Maurice Clifford Hately | Radio antennas |
| US5835067A (en) | 1994-04-28 | 1998-11-10 | Goodman; Edward A. | Short vertical 160 meter band antenna |
| US5714917A (en) | 1996-10-02 | 1998-02-03 | Nokia Mobile Phones Limited | Device incorporating a tunable thin film bulk acoustic resonator for performing amplitude and phase modulation |
| US5920261A (en) | 1996-12-31 | 1999-07-06 | Design Vision Inc. | Methods and apparatus for tracking and displaying objects |
| KR100216885B1 (ko) | 1997-07-25 | 1999-09-01 | 윤덕용 | 전기장 센서 |
| ATE346415T1 (de) | 1997-08-08 | 2006-12-15 | Jurgen G Meins | Verfahren und vorrichtung zur kontaktlosen stromversorgung |
| GB9718311D0 (en) | 1997-08-30 | 1997-11-05 | Hately Maurice C | Dual loop radio antenna |
| US6049507A (en) * | 1997-09-30 | 2000-04-11 | Mobil Oil Corporation | Method and apparatus for correcting effects of ship motion in marine seismology measurements |
| US5945947A (en) * | 1998-06-25 | 1999-08-31 | Doppler Systems, Inc. | Synthetic doppler direction finder for use with FSK encoded transmitters |
| RU2143775C1 (ru) | 1999-03-25 | 1999-12-27 | Стребков Дмитрий Семенович | Способ и устройство для передачи электрической энергии |
| US6151556A (en) * | 1999-06-18 | 2000-11-21 | Mobil Oil Corporation | Method and apparatus for doppler smear correction in marine seismology measurements |
| RU2161850C1 (ru) | 1999-07-14 | 2001-01-10 | Стребков Дмитрий Семенович | Способ и устройство передачи электрической энергии |
| US6382022B1 (en) * | 2000-03-27 | 2002-05-07 | The United States Of America As Represented By The Secretary Of The Navy | Shipboard wave measurement system |
| US6864849B2 (en) | 2000-05-23 | 2005-03-08 | Robert T. Hart | Method and apparatus for creating an EH antenna |
| US6486846B1 (en) | 2000-05-23 | 2002-11-26 | Robert T. Hart | E H antenna |
| RU2183376C2 (ru) | 2000-07-03 | 2002-06-10 | Стребков Дмитрий Семенович | Способ и устройство для передачи электрической энергии (варианты) |
| US6529142B2 (en) * | 2000-07-24 | 2003-03-04 | Shipong Norman Yeh | Parked vehicle location finder |
| US6990360B2 (en) | 2000-11-03 | 2006-01-24 | The United States Of America As Represented By The Secretary Of The Army | Pattern detection using the Bragg Effect at RF frequencies |
| US6650556B2 (en) | 2001-10-31 | 2003-11-18 | Intel Corporation | Multi-phase DC—DC converter |
| GB2387053B (en) | 2001-11-12 | 2006-02-01 | Telstra Corp Ltd | Surface wave radar |
| AU2002351358A1 (en) | 2001-12-12 | 2003-06-23 | Jervis B. Webb Company | Driverless vehicle guidance system and method |
| JP4757427B2 (ja) * | 2002-02-15 | 2011-08-24 | 三菱電機株式会社 | 傾斜角度測定装置 |
| US7113138B2 (en) | 2002-04-13 | 2006-09-26 | Maurice Clifford Hately | Radio antennas |
| RU2255406C2 (ru) | 2003-02-21 | 2005-06-27 | Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ) | Способ и устройство для передачи электрической энергии |
| US7068234B2 (en) | 2003-05-12 | 2006-06-27 | Hrl Laboratories, Llc | Meta-element antenna and array |
| JP3924263B2 (ja) | 2003-06-09 | 2007-06-06 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置 |
| US6956535B2 (en) | 2003-06-30 | 2005-10-18 | Hart Robert T | Coaxial inductor and dipole EH antenna |
| US7280033B2 (en) | 2003-10-15 | 2007-10-09 | Current Technologies, Llc | Surface wave power line communications system and method |
| JP3950837B2 (ja) * | 2003-10-21 | 2007-08-01 | Necディスプレイソリューションズ株式会社 | プロジェクタ並びにプロジェクタを使用した電子黒板システム及び指示位置取得方法 |
| US7834813B2 (en) | 2004-10-15 | 2010-11-16 | Skycross, Inc. | Methods and apparatuses for adaptively controlling antenna parameters to enhance efficiency and maintain antenna size compactness |
| RU2273939C1 (ru) | 2004-12-01 | 2006-04-10 | Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ) | Способ и устройство для передачи электрической энергии |
| US7834718B2 (en) | 2004-12-13 | 2010-11-16 | Intest Corporation | Signal module with reduced reflections |
| US9118216B2 (en) | 2005-02-18 | 2015-08-25 | Cpg Technologies, Llc | Parametric power multiplication |
| EP3614104B1 (en) | 2005-03-18 | 2022-06-08 | Gatekeeper Systems, Inc. | Two-way communication system for tracking locations and statuses of wheeled vehicles |
| US7825543B2 (en) | 2005-07-12 | 2010-11-02 | Massachusetts Institute Of Technology | Wireless energy transfer |
| CN101860089B (zh) | 2005-07-12 | 2013-02-06 | 麻省理工学院 | 无线非辐射能量传递 |
| US7782710B1 (en) * | 2005-08-09 | 2010-08-24 | Uzes Charles A | System for detecting, tracking, and reconstructing signals in spectrally competitive environments |
| US7586384B2 (en) | 2005-08-15 | 2009-09-08 | Nokia Corporation | Integrated load impedance sensing for tunable matching networks |
| US7307589B1 (en) | 2005-12-29 | 2007-12-11 | Hrl Laboratories, Llc | Large-scale adaptive surface sensor arrays |
| US7453414B2 (en) | 2006-01-12 | 2008-11-18 | Harris Corporation | Broadband omnidirectional loop antenna and associated methods |
| RU2310964C1 (ru) | 2006-02-10 | 2007-11-20 | Российская Академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство для передачи электрической энергии |
| JP4278061B2 (ja) | 2006-03-06 | 2009-06-10 | 国立大学法人京都大学 | 建物内無線電力伝送システム |
| US7782264B1 (en) | 2006-03-28 | 2010-08-24 | The Board Of Governors For Higher Education, State Of Rhode Island And Providence Plantations | Systems and methods for providing distributed load monopole antenna systems |
| US20070298846A1 (en) | 2006-06-14 | 2007-12-27 | Powercast, Llc | Wireless power transmission |
| RU2341860C2 (ru) | 2006-07-04 | 2008-12-20 | Виктор Иванович Петрик | Способ и устройство для передачи электрической энергии (варианты) |
| JP4345850B2 (ja) | 2006-09-11 | 2009-10-14 | ソニー株式会社 | 通信システム及び通信装置 |
| JP4893483B2 (ja) | 2006-09-11 | 2012-03-07 | ソニー株式会社 | 通信システム |
| US7960870B2 (en) | 2006-11-27 | 2011-06-14 | Xslent Energy Technologies, Llc | Power extractor for impedance matching |
| EP1965223B1 (en) | 2007-03-02 | 2013-12-18 | Saab Ab | Subsurface Imaging radar |
| RU2340064C1 (ru) | 2007-03-29 | 2008-11-27 | Российская Академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство для передачи электрической энергии (варианты) |
| US7924652B2 (en) * | 2007-06-01 | 2011-04-12 | Baker Hughes Incorporated | Method for determining seismic anisotropy |
| RU2342761C1 (ru) | 2007-09-07 | 2008-12-27 | Российская Академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство для передачи электрической энергии (варианты) |
| EP2195716A1 (en) | 2007-09-26 | 2010-06-16 | Governing Dynamics, LLC. | Self-charging electric vehicles and aircraft, and wireless energy distribution system |
| US20110013481A1 (en) * | 2007-11-12 | 2011-01-20 | David Alan Clark | Method and apparatus for detecting marine deposits |
| WO2013093922A2 (en) | 2011-12-21 | 2013-06-27 | Powermat Technologies Ltd. | System and method for providing wireless power transfer functionality to an electrical device |
| US8350769B1 (en) | 2008-03-20 | 2013-01-08 | United States Of America As Represented By Secretary Of The Navy | Frequency agile electrically small tactical AM broadcast band antenna system |
| RU2366057C1 (ru) | 2008-04-25 | 2009-08-27 | Российская Академия сельскохозяйственных наук Государственное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство передачи электроэнергии |
| AU2009246310B9 (en) | 2008-05-14 | 2015-04-02 | Massachusetts Institute Of Technology | Wireless energy transfer, including interference enhancement |
| RU2366058C1 (ru) | 2008-05-16 | 2009-08-27 | Российская Академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство для передачи электроэнергии |
| EP2329290A1 (en) | 2008-08-20 | 2011-06-08 | BAE Systems PLC | High frequency surfacewave radar |
| US20110156494A1 (en) | 2008-08-25 | 2011-06-30 | Governing Dynamics Llc | Wireless Energy Transfer System |
| JP4911148B2 (ja) | 2008-09-02 | 2012-04-04 | ソニー株式会社 | 非接触給電装置 |
| US8933594B2 (en) | 2008-09-27 | 2015-01-13 | Witricity Corporation | Wireless energy transfer for vehicles |
| WO2010070701A1 (ja) * | 2008-12-15 | 2010-06-24 | トヨタ自動車株式会社 | 対象物測定装置、及び当該装置で用いられる方法 |
| US20100149029A1 (en) | 2008-12-15 | 2010-06-17 | Sony Ericsson Mobile Communications Ab | System and Method for Obtaining Location Assistance Data |
| US8299936B2 (en) | 2008-12-18 | 2012-10-30 | Bae Systems Information And Electronic Systems Integration Inc. | Method and apparatus for establishing low frequency/ultra low frequency and very low frequency communications |
| US9130394B2 (en) | 2009-02-05 | 2015-09-08 | Qualcomm Incorporated | Wireless power for charging devices |
| JP4752931B2 (ja) | 2009-02-18 | 2011-08-17 | ブラザー工業株式会社 | 無線タグ通信装置 |
| US8338991B2 (en) | 2009-03-20 | 2012-12-25 | Qualcomm Incorporated | Adaptive impedance tuning in wireless power transmission |
| US8803474B2 (en) | 2009-03-25 | 2014-08-12 | Qualcomm Incorporated | Optimization of wireless power devices |
| US8237313B2 (en) | 2009-04-08 | 2012-08-07 | John Ruocco | Method and apparatus for wireless transmission and reception of electric power |
| WO2010120790A2 (en) | 2009-04-13 | 2010-10-21 | Viasat, Inc. | Half-duplex phased array antenna system |
| WO2010129369A2 (en) | 2009-04-28 | 2010-11-11 | Mojo Mobility, Inc. | System and methods for inductive charging, and improvements and uses thereof |
| CN102460896B (zh) | 2009-05-07 | 2014-04-23 | 意大利电信股份公司 | 无线地传送能量的系统 |
| US8274178B2 (en) | 2009-06-21 | 2012-09-25 | Christopher Allen Tucker | System of transmission of wireless energy |
| US8063717B2 (en) | 2009-07-27 | 2011-11-22 | Avago Technologies Wireless Ip (Singapore) Pte. Ltd. | Duplexer having resonator filters |
| US8587490B2 (en) | 2009-07-27 | 2013-11-19 | New Jersey Institute Of Technology | Localized wave generation via model decomposition of a pulse by a wave launcher |
| US20110049997A1 (en) | 2009-09-03 | 2011-03-03 | Tdk Corporation | Wireless power feeder and wireless power transmission system |
| RU2409883C1 (ru) | 2009-09-11 | 2011-01-20 | Российская Академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство для передачи электрической энергии |
| US8541974B2 (en) | 2009-09-17 | 2013-09-24 | Qualcomm Incorporated | Movable magnetically resonant antenna for wireless charging |
| US20110080050A1 (en) | 2009-10-02 | 2011-04-07 | Ut-Battelle, Llc | Systems and Methods for Directional Reactive Power Ground Plane Transmission |
| US9461505B2 (en) | 2009-12-03 | 2016-10-04 | Mitsubishi Electric Research Laboratories, Inc. | Wireless energy transfer with negative index material |
| US20110133565A1 (en) | 2009-12-03 | 2011-06-09 | Koon Hoo Teo | Wireless Energy Transfer with Negative Index Material |
| RU2473160C2 (ru) | 2009-12-04 | 2013-01-20 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство для передачи электрической энергии |
| US9030363B2 (en) | 2009-12-29 | 2015-05-12 | Kathrein-Werke Ag | Method and apparatus for tilting beams in a mobile communications network |
| US8384247B2 (en) | 2010-01-13 | 2013-02-26 | Mitsubishi Electric Research Laboratories, Inc. | Wireless energy transfer to moving devices |
| US8159385B2 (en) | 2010-02-04 | 2012-04-17 | Sensis Corporation | Conductive line communication apparatus and conductive line radar system and method |
| RU2423772C1 (ru) | 2010-03-23 | 2011-07-10 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство передачи электрической энергии (варианты) |
| US8428580B1 (en) * | 2010-06-30 | 2013-04-23 | Rockwell Collins, Inc. | Aviation cellular communications system and method |
| RU2459340C2 (ru) | 2010-09-21 | 2012-08-20 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство для передачи электрической энергии |
| RU2474031C2 (ru) | 2010-09-22 | 2013-01-27 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство для передачи электрической энергии (варианты) |
| FR2965978B1 (fr) | 2010-10-07 | 2012-10-19 | Tdf | Antenne de grande dimension a ondes de surface et a large bande |
| US20120169568A1 (en) | 2011-01-03 | 2012-07-05 | Palm, Inc. | Multiband antenna with ground resonator and tuning element |
| JP2012147351A (ja) | 2011-01-14 | 2012-08-02 | Sony Corp | 信号伝送装置、電子機器、及び、信号伝送方法 |
| JP5058350B1 (ja) * | 2011-03-30 | 2012-10-24 | 株式会社東芝 | 送電装置及び電力伝送システム |
| US9030421B2 (en) | 2011-04-01 | 2015-05-12 | Qualcomm Incorporated | Touchscreen controller with adjustable parameters |
| US20130029595A1 (en) | 2011-07-29 | 2013-01-31 | Qualcomm Incorporated | Communications related to electric vehicle wired and wireless charging |
| US20130049674A1 (en) | 2011-08-24 | 2013-02-28 | Qualcomm Incorporated | Integrated photo voltaic solar plant and electric vehicle charging station and method of operation |
| GB2494435B (en) | 2011-09-08 | 2018-10-03 | Roke Manor Res Limited | Apparatus for the transmission of electromagnetic waves |
| US8941448B2 (en) | 2011-10-13 | 2015-01-27 | Mediatek Singapore Pte. Ltd. | M-way coupler |
| US9264108B2 (en) | 2011-10-21 | 2016-02-16 | Qualcomm Incorporated | Wireless power carrier-synchronous communication |
| RU2488207C1 (ru) | 2011-11-17 | 2013-07-20 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство для передачи электрической энергии |
| RU2488208C1 (ru) | 2011-12-22 | 2013-07-20 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство для передачи электрической энергии |
| WO2013122703A1 (en) | 2012-02-14 | 2013-08-22 | Ut-Battelle, Llc | Wireless power charging using point of load controlled high frequency power converters |
| CN104350664A (zh) | 2012-03-19 | 2015-02-11 | 基思·麦克斯韦尔·霍华德 | 用于无线分配电力的系统 |
| US8315649B1 (en) | 2012-03-23 | 2012-11-20 | Google Inc. | Providing a geographic location of a device while maintaining geographic location anonymity of access points |
| US20150280444A1 (en) | 2012-05-21 | 2015-10-01 | University Of Washington Through Its Center For Commercialization | Wireless power delivery in dynamic environments |
| US9419476B2 (en) | 2012-07-10 | 2016-08-16 | Farrokh Mohamadi | Flat panel, stationary or mobile, spatially beam-formed wireless energy delivery system |
| GB201215152D0 (en) | 2012-08-24 | 2012-10-10 | Imp Innovations Ltd | Maximising DC to load efficiency for inductive power transfer |
| KR20150103651A (ko) | 2012-08-28 | 2015-09-11 | 오클랜드 유니서비시즈 리미티드 | 개별적으로 위상을 제어하는 다상 유도 전력 전달 시스템 |
| US9252492B2 (en) | 2012-08-29 | 2016-02-02 | Intel Deutschland Gmbh | Antenna tuning via multi-feed transceiver architecture |
| US9270248B2 (en) | 2012-10-12 | 2016-02-23 | Infineon Technologies Ag | Impedance matching network with improved quality factor and method for matching an impedance |
| US9523784B2 (en) * | 2012-12-18 | 2016-12-20 | Schlumberger Technology Corporation | Data processing systems and methods for downhole seismic investigations |
| US20140169129A1 (en) * | 2012-12-18 | 2014-06-19 | Schlumberger Technology Corporation | Downhole Receiver Systems and Methods for Low Frequency Seismic Investigations |
| RU2544380C2 (ru) | 2013-01-24 | 2015-03-20 | Дмитрий Семенович Стребков | Способ и устройство для передачи электрической энергии |
| RU2533060C2 (ru) | 2013-02-01 | 2014-11-20 | Дмитрий Семенович Стребков | Способ и устройство для передачи электрической энергии |
| US9500486B2 (en) | 2013-02-28 | 2016-11-22 | Here Global B.V. | Method and apparatus for formulating a positioning extent for map matching |
| US9910144B2 (en) | 2013-03-07 | 2018-03-06 | Cpg Technologies, Llc | Excitation and use of guided surface wave modes on lossy media |
| US9912031B2 (en) | 2013-03-07 | 2018-03-06 | Cpg Technologies, Llc | Excitation and use of guided surface wave modes on lossy media |
| US9107057B2 (en) * | 2013-03-15 | 2015-08-11 | Cornerturn Llc | Methods, apparatuses, systems and computer readable mediums for determining location of assets |
| RU2548571C2 (ru) | 2013-04-04 | 2015-04-20 | Федеральное государственное бюджетное научное учреждение "Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ФГБНУ ВИЭСХ) | Система для беспроводного электропитания удаленных потребителей электрической энергии по лазерному лучу |
| GB201306555D0 (en) | 2013-04-10 | 2013-05-22 | Roke Manor Research | System and Method for Sensing Signal Disruption |
| JP6164914B2 (ja) | 2013-04-30 | 2017-07-19 | キヤノン株式会社 | 給電装置、制御方法及びプログラム |
| RU2554723C2 (ru) | 2013-06-13 | 2015-06-27 | Федеральное государственное бюджетное научное учреждение "Всероссийский научно-исследовательский институт электрификации сельского хозяйства" (ФГБНУ ВИЭСХ) | Способ и устройство электроснабжения воздушного летательного аппарата (варианты) |
| US9647345B2 (en) | 2013-10-21 | 2017-05-09 | Elwha Llc | Antenna system facilitating reduction of interfering signals |
| US8897697B1 (en) | 2013-11-06 | 2014-11-25 | At&T Intellectual Property I, Lp | Millimeter-wave surface-wave communications |
| JP5839020B2 (ja) | 2013-11-28 | 2016-01-06 | Tdk株式会社 | 送電コイルユニット及びワイヤレス電力伝送装置 |
| US9188657B2 (en) * | 2013-12-03 | 2015-11-17 | The Boeing Company | Systems and methods of transmitter location detection |
| GB201401014D0 (en) | 2014-01-21 | 2014-03-05 | Welding Inst | System and method for transmitting data or power across a structural component |
| US10520631B2 (en) * | 2014-06-05 | 2019-12-31 | Conocophillips Company | Magnetic field measurement via streamer cables |
| FR3036543B1 (fr) | 2015-05-18 | 2017-05-12 | Tdf | Systeme antennaire a ondes de surface |
| US9722318B2 (en) | 2015-07-14 | 2017-08-01 | At&T Intellectual Property I, L.P. | Method and apparatus for coupling an antenna to a device |
-
2015
- 2015-09-10 US US14/850,056 patent/US10408916B2/en active Active
-
2016
- 2016-08-22 KR KR1020187009985A patent/KR20180052684A/ko unknown
- 2016-08-22 EA EA201890693A patent/EA201890693A1/ru unknown
- 2016-08-22 MX MX2018002873A patent/MX2018002873A/es unknown
- 2016-08-22 CA CA2997753A patent/CA2997753A1/en not_active Abandoned
- 2016-08-22 EP EP16760272.1A patent/EP3341684B1/en active Active
- 2016-08-22 WO PCT/US2016/047956 patent/WO2017044296A1/en active Application Filing
- 2016-08-22 AU AU2016320717A patent/AU2016320717B2/en not_active Ceased
- 2016-08-22 BR BR112018004915A patent/BR112018004915A2/pt not_active Application Discontinuation
- 2016-08-22 CN CN201680064970.5A patent/CN108351211A/zh active Pending
- 2016-08-22 JP JP2018513320A patent/JP2018526653A/ja active Pending
- 2016-09-06 TW TW105128787A patent/TW201721178A/zh unknown
-
2018
- 2018-03-07 IL IL257943A patent/IL257943A/en unknown
- 2018-03-09 PH PH12018500526A patent/PH12018500526A1/en unknown
- 2018-04-06 ZA ZA2018/02276A patent/ZA201802276B/en unknown
- 2018-10-23 HK HK18113541.7A patent/HK1254455A1/zh unknown
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018530753A (ja) * | 2015-09-10 | 2018-10-18 | シーピージー テクノロジーズ、 エルエルシーCpg Technologies, Llc | 誘導表面波を用いた地理的位置 |
Also Published As
| Publication number | Publication date |
|---|---|
| IL257943A (en) | 2018-05-31 |
| US10408916B2 (en) | 2019-09-10 |
| TW201721178A (zh) | 2017-06-16 |
| BR112018004915A2 (pt) | 2018-10-09 |
| ZA201802276B (en) | 2019-07-31 |
| CA2997753A1 (en) | 2017-03-16 |
| EP3341684B1 (en) | 2020-03-25 |
| MX2018002873A (es) | 2018-06-15 |
| AU2016320717A1 (en) | 2018-04-26 |
| US20170074969A1 (en) | 2017-03-16 |
| AU2016320717B2 (en) | 2019-03-21 |
| EA201890693A1 (ru) | 2018-09-28 |
| CN108351211A (zh) | 2018-07-31 |
| HK1254455A1 (zh) | 2019-07-19 |
| EP3341684A1 (en) | 2018-07-04 |
| KR20180052684A (ko) | 2018-05-18 |
| WO2017044296A1 (en) | 2017-03-16 |
| PH12018500526A1 (en) | 2018-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10001553B2 (en) | Geolocation with guided surface waves | |
| US20190025060A1 (en) | Geolocation using guided surface waves | |
| JP2018526653A (ja) | 誘導表面波を用いた地理的位置 | |
| JP2018526654A (ja) | 誘導表面波を用いた地理的位置 | |
| JP2018526655A (ja) | 誘導表面波を用いた地理的位置 | |
| JP2018530753A (ja) | 誘導表面波を用いた地理的位置 | |
| JP2018530291A (ja) | 誘導表面波を用いたグローバル時刻同期 | |
| JP2018534764A (ja) | 高透磁率のコアを有する磁気コイル |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190731 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200605 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210104 |